
DEPTH-BASED DETECTION OF SALIENT MOVING OBJECTS IN
SONIFIED VIDEOS FOR BLIND USERS
Benoˆıt Deville
1
, Guido Bologna
2
, Michel Vinckenbosch
2
and Thierry Pun
1
1
Computer Vision and Multimedia Lab, University of Geneva, Route de Drize 7, Carouge, Switzerland
2
Laboratoire d’Informatique Industrielle, University of Applied Science, Geneva, Switzerland
Keywords:
Focus of attention (FOA), visual saliency, depth map, stereo image processing, mobility aid, visual handicap.
Abstract:
The context of this work is the development of a mobility aid for visually impaired persons. We present here an
original approach for a real time alerting system, based on the use of feature maps for detecting visual salient
parts in images. In order to improve the quality of this method, we propose here to benefit from a new feature
map constructed from the depth gradient. A specific distance function is described, which takes into account
both stereoscopic camera limitations and users choices. We demonstrate here that this additional depth-based
feature map allows the system to detect the salient regions with good accuracy in most situations, even with
noisy disparity maps.
1 INTRODUCTION
See ColOr is a system that aims at creating a mo-
bility aid for people who lost their vision. With the
use of spatialized musical instrumental sounds, visu-
ally impaired users will be able to hear an auditory
reprensentation of the environment in front of them;
parts of this system are in the testing phase (Sec-
tion 2). However, as image points are represented
by sound sources and typical cameras capture hun-
dreds of thousand pixels, it is not feasible to transcribe
the whole scene without risking to create a cacophony
that would lead to miss important information. This
is why we developed an alerting system to attract the
user’s attention towards regions of importance.
This alerting system is based on a visual attention
model, built from conspicuity maps. A new feature
map, i.e. the depth gradient, which to our knowledge
has not been used before in this context, is added to
the model. The purpose of this feature map is to de-
tect objects that come towards the blind user, and that
should be avoided. A distance function is integrated
in our model. It lets users decide from which dis-
tance objects should be detected ; this function allows
to take into account both stereoscopic camera limita-
tions in distance computation, and user’s choices.
The focus of attention (FOA) is a cognitive pro-
cess that can be described as the decision to concen-
trate on one or more senses (e.g. both touch and vi-
sion) on a specific object, sound, smell, etc. This is for
instance the case with the well known cocktail party
effect, where one can follow a particular conversa-
tion out of a set of multiple and diverse sounds. This
ability to focus on a specific point is guided by our
senses, and our interests in a given situation. We are
interested here in the dectection of salient areas from
video sequences; we ground this detection on specific
visual properties of the scene, namely distance and
depth gradient.
It is shown here that the use of the depth gradient
is an important feature in a mobility aid system. It ob-
viously helps in the cases where objects might disturb
the movements of a blind user. We also demonstrate
that the combination of depth gradient and distance
function improves the results in cases where objects
in movement are not a threat for the user.
The article is organized as follows. In Section 2,
we briefly describe the See ColOr system, and explain
how colours are transformed into musical instrument
sounds. The inherent limitation of this approach, that
is the sonification of only parts of the scene, leads to
the need for a visual saliency scheme, summarized in
Section 3. In that section, we introduce some known
methods that use visual attention models to infer a
FOA. We then describe our approach based on dis-
tance function and depth gradient. Section 4 analy-
ses the results provided by our method in comparison
with the use of depth information only Section 5 con-
434
Deville B., Bologna G., Vinckenbosch M. and Pun T. (2008).
DEPTH-BASED DETECTION OF SALIENT MOVING OBJECTS IN SONIFIED VIDEOS FOR BLIND USERS.
In Proceedings of the Third International Conference on Computer Vision Theory and Applications, pages 434-439
DOI: 10.5220/0001084104340439
Copyright
c
SciTePress
cludes on these results, and offers some suggestions
on improvements that are to be made.
2 SEE COLOR
The objectiveof the See ColOr project (Bologna et al.,
2007a; Bologna et al., 2007b) is to develop a non-
invasive mobility aid for blind users. The system
uses auditive means to represent frontal image scenes
which are recorded by a stereoscopic camera. Each
colour is mapped into a set of up to three different
musical instruments with varying pitch, depending on
the three parameters of the colour in the HSL colour
space. Thus, it allows a user who lost his/her vision
to have access to the colour information of the envi-
ronment through a synesthetic process.
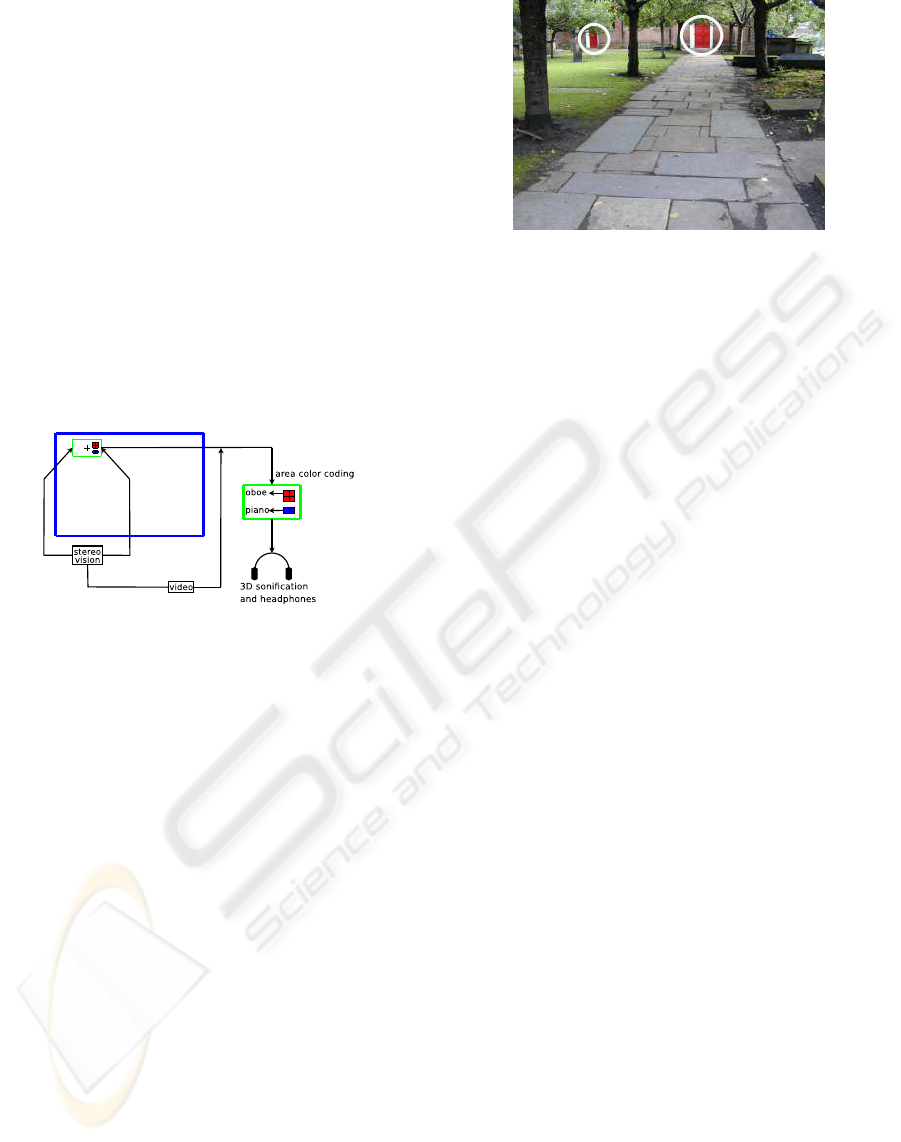
Figure 1: The See ColOr general framework.
The system does not sonify the recorded image as
a whole. Indeed, this would create misunderstanding
because a usual scene is composed of many differ-
ent colours, which would lead to a high number of
instruments playing at the same time. Since only a
small part of the image is actually sonified, the risk of
missing important parts of the scene is however not
negligible. The effect of such a way of sonifying the
scene can be considered similar to the tunnel vision.
Furthermore, a previous experiment (Bologna et al.,
2007b) showed that it was not so easy for blindfolded
users to detect small regions on images, on the basis
of hearing as well as with the help of a tactile display.
In fact, they needed from 4 to 9 minutes to find a red
door on a churchyard static image using only a tactile
version of this picture and the auditive output depend-
ing on the touched part of the image. These doors rep-
resent about 1% of the total surface area of the picture
(Figure 2), but are obviously visually salient. For this
reason an alarm system based on the mechanism of
visual saliency is being developed. This mechanism
allows the detection of parts of the scene that would
usually attract the visual attention of sighted people.
Once the program has detected such saliencies, a new
sound will indicate to the blind user that another part
of the scene is noteworthy.
Figure 2: Blindfolded users had to find any of the two red
doors (circled) using only sound and tactile information.
Despite their saliency, the red doors only occupy 1.1% of
the image surface.
3 VISUAL SALIENCY
Saliency is a visual mechanism linked to the emer-
gence of a figure over a background (Landragin,
2004). During the pre-attentive phase of the visual
perception, our attention first stops on elements that
arise from our visual environment, and finally focuses
the cognitive processes on these elements only. Dif-
ferent factors enter into account during this process,
both physical and cognitive. The See ColOr project
only focuses on physical factors. As a matter of fact,
blind users will use their own cognitive abilities to
understand the captured scene, given their personal
impressions, their particular knowledge of the envi-
ronment (e.g., if the user is inside or outside), and the
sonified colours. Physical factors directly depend on
the perceived scene and the characteristics of the ob-
jects that compose it. Lightness contrast, opposition
of colours (e.g. red/green and blue/yellow), geometri-
cal features, singularity in a set of objects or in an ob-
ject itself (Hoffman and Singh, 1997) are some exam-
ples of these physical factors. Different computerized
approaches have been designed to digitally reproduce
this human ability, and we will briefly present one of
them in the following.
3.1 Conspicuity Maps
In order to detect salient regions, some methods will
center on specific characteristics of images like en-
tropy (Kadir and Brady, 2001) or blobs, detected
with Difference of Gaussians (DoG) (Lowe, 1999) or
the speeded up robust features (SURF) (Bay et al.,
2006), a simplified form of the Determinant of Hes-
sian (DoH) approach. Other methods, based on con-
spicuity maps (Milanese et al., 1995; Itti et al., 1998),
try to mimic the physical properties of the Human Vi-
sual System (HVS).
DEPTH-BASED DETECTION OF SALIENT MOVING OBJECTS IN SONIFIED VIDEOS FOR BLIND USERS
435
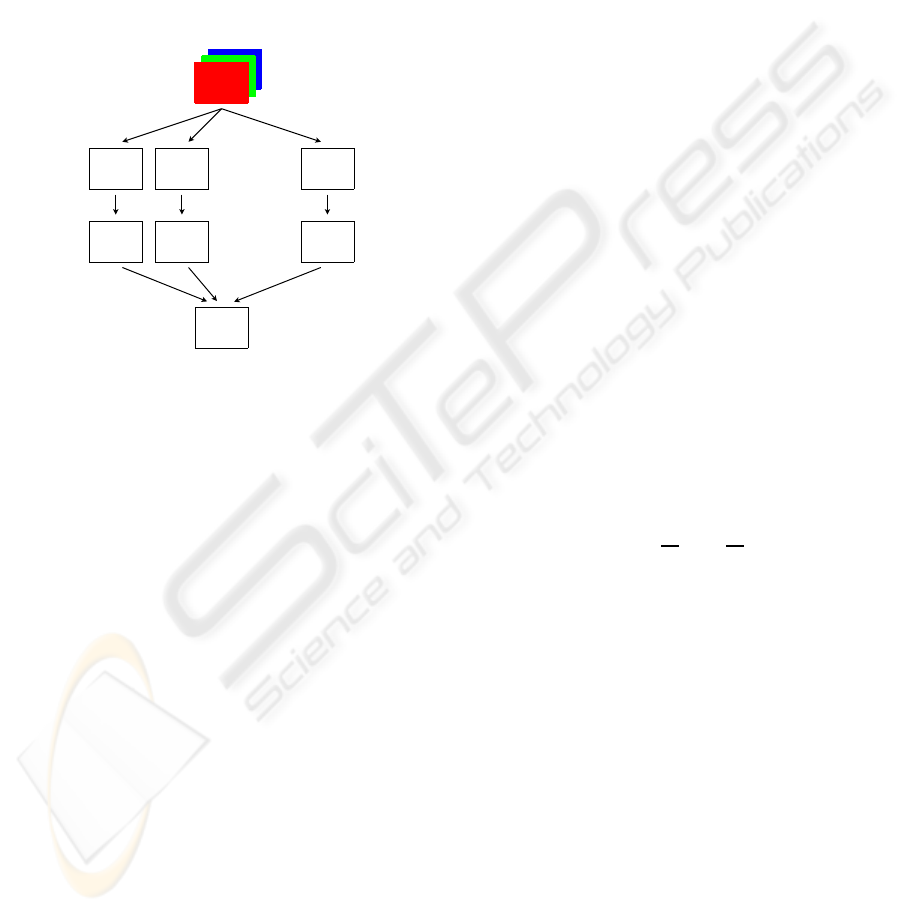
Features inspired by the HVS are analysed sep-
arately to build a set of maps called feature maps,
denoted F
i
. These maps are filtered so that the con-
spicuity map (C-map) of each feature map only con-
tains information concerning the few regions that di-
verge the most from their neighbourhood. All C-maps
are then combined by a Winner-Take-All approach
in order to determine the most salient region of the
recorded scene. Figure 3 summarizes the extraction
of the saliency map S on a colour image using con-
spicuity maps.
...
...
F
1
F
2
F
m
...
C
1
C
2
C
m
Filtering
Feature extraction
...
Normalized combination
S
Figure 3: General overview of the conspicuity map ap-
proach for saliency detection. S being the final saliency
map, and F
i
, C
i
the feature maps and their associated con-
spicuity maps, respectively.
Salient region detection using conspicuity maps
have been proved to be efficient, both in terms of rel-
evance of detected regions and speed, thanks to the
increasing computing power of CPUs.
3.2 Depth Map
Depth is an important information when one has to
decide whether an object is of interest or should be ig-
nored. Close objects might be dangerous or interest-
ing, thus implying an action from the user. Despite the
importance of such an information for the FOA, the
literature does not report much on approaches mak-
ing use of depth. Very few methods takes depth into
account to guide the FOA.
The first to propose the use of depth in an attention
model (Maki et al., 1996) were only interested in de-
termining the closest object from the user. Each time
an object was closer than the previous match, the at-
tention model would simulate a saccade, just as a hu-
man would do. The problem of such an approach is
the absence of other importantfeatures, such as colour
opposition, edge magnitude, illumination, etc.
It has been suggested later to use depth in the usual
bottom-up approach of saliency-based visual atten-
tion models (Ouerhani and H¨ugli, 2000; Jost et al.,
2004). They proved the interest of depth informa-
tion as a new feature map, combined with common
feature maps like colour opposition, intensity, and in-
tensity gradient components. However, this does not
give any informationabout objects movements, which
is very important for a mobility aid, particularly when
an object comes towards the user. This is why we pro-
pose here to combine depth and depth gradient. These
features are computed and combined as follows.
Given a 3D point p = {p
x
, p
y
, p
z
}, we consider
that close objects are more important than others.
Nevertheless, an object distant from less than d
min
(for
instance d
min
= 1 meter) should be detected by the
blind user’s white cane, which implies the following
distance function when we compute the value of the
feature map F
d
:
F
d
(p) =
(
d
max
− p
z
, if d
min
< p
z
≤ d
max
0, otherwise
(1)
where d
max
is the maximal considered distance from
the user. This parameter depends on the environment,
the stereoscopic device, and the user’s choice.
The depth gradient, in order to contain the infor-
mation of movement, is computed over time. Since
we consider that the only objects that are noteworthy
in term of gradient are the ones that get closer to the
user, we obtain the following gradient function :
F
∇
(p) =
−
∂z
∂t
, if
∂z
∂t
< 0
0, otherwise
(2)
To get the conspicuity mapC
i
from F
i
, we look for
maxima/minima of a DoG applied on F
i
:
C
i
= argminmax(F
i
∗ g
σ
1
− F
i
∗ g
σ
2
) (3)
where g
σ
1
and g
σ
2
are Gaussians at scale σ
1
and σ
2
,
respectively. For an image I, we consider the saliency
map as the weighted sum of the conspicuity maps :
S
I
= λ
d
·C
d
(I) + λ
∇
·C
∇
(I) (4)
where C
d
and C
∇
are the conspicuity maps computed
from the feature maps F
d
and F
∇
respectively, and λ
d
,
λ
∇
(λ
d
+ λ
∇
= 1), constants that determine the im-
portance of each feature. The final point of interest,
which will lead the user’s FOA, will be the point of
highest value in the obtained saliency map.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
436
4 EXPERIMENTS AND
EVALUATION
In this section we present some specific experiments
carried out to validate the hypothesis that depth gradi-
ent is a useful information in order to guide the FOA.
Depth itself having been proved to be of interest in
such a task (Ouerhani and H¨ugli, 2000), we consider
the combination of distance and depth gradient fea-
tures relatively to the depth feature alone.
4.1 Hypotheses
Four different cases are studied, and for each case, we
expect a specific result.
Completely Static Both camera and scene are static:
depth gradient should not give any additional in-
formation because no movement is present.
Camera Moving The camera moves towards the
scene: depth gradient should not give additional
information because the depth gradient’s feature
map is uniform, and no conspicuity arises from it.
Object Coming An object comes from the back-
ground and crosses the camera field of view:
depth gradient should indicate the user as the most
salient region.
Object Leaving Same as previous, but the object
leaves the scene, from foreground to background:
depth gradient should first indicates the object as
the most salient region if it is the closest object
from the camera, then no more additional infor-
mation should be given by the gradient.
4.2 Results and Discussion
In order to check the validity of the hypothesis, results
obtained with the combination of distance and depth
gradient have been compared to depth based results
for each case.
The method described in the previous section has
been tested on four different video sequences. These
videos were recorded using a STH-MDCS2
1
stereo-
scopic camera, and its development library, which
computes in real time the disparity map needed for
the determination of the depth. The resulting dispar-
ity map is unfortunately far from perfect : the depth
information is unaccurate or undetermined at many
points of the scene. However, given the importance of
real time in an alerting system, the presented method
is performed with this raw information.
1
Videre Design: http://www.videredesign.com
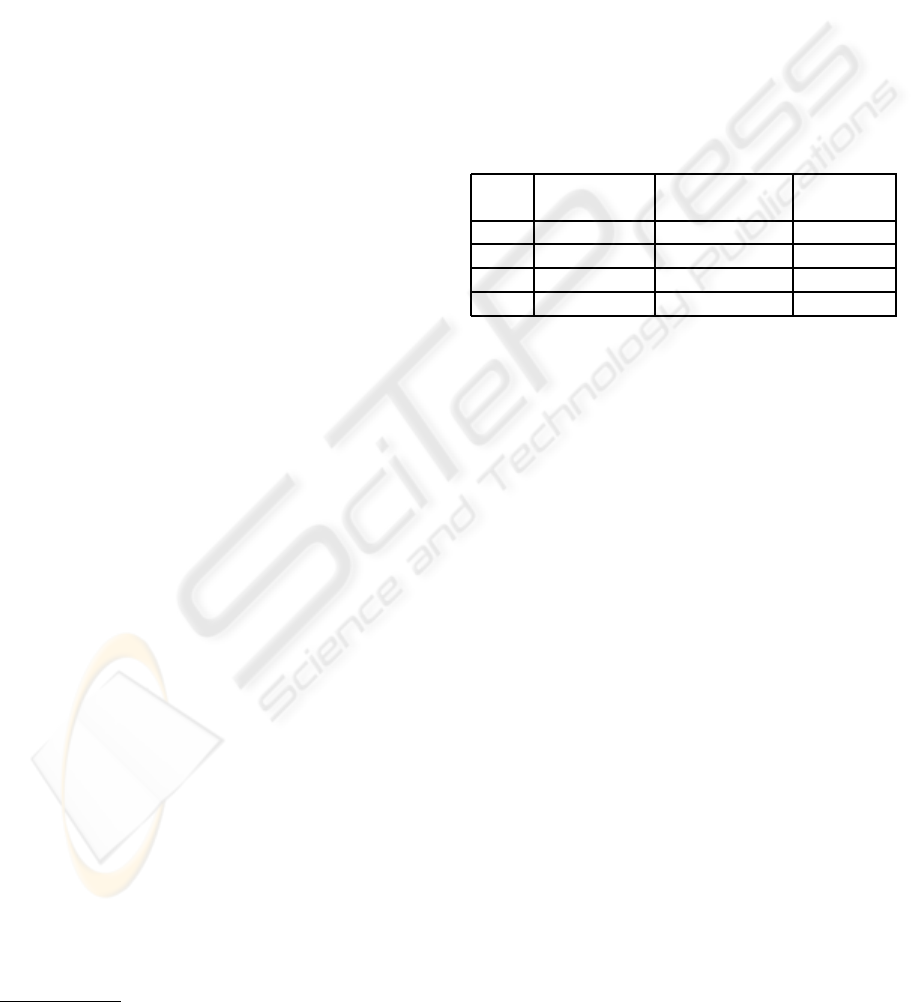
The results for each hypothesis describes previ-
ously are presented and analysed, and summarized in
Table 1. It shows the percentage of good match for
each sequence. The result on each picture of a video
sequence is said to be a good match whenever the ex-
pected area (defined in Section 4.1) of the picture is
determined as the most salient. This table also points
out that the proposed method is almost real time, since
it only takes around 90 ms to process each picture in
a video sequence. A framerate of 11 image per sec-
ond is sufficient for an alerting system, and for the See
ColOr framework, where images are sonified around
three times per second.
Table 1: Percentage of good matches on four different video
sequences, with depth alone or with a combination of depth
and depth gradient, and average computating time in ms.
Depth and Average
Case Depth alone depth gradient CPU time
1 72.8% 93.1% 97.3ms
2 70.0% 63.8% 94.8ms
3 26.7% 49.3% 85.0ms
4 56.4% 75.2% 84.1ms
4.2.1 Camera and Scene are Static
The sequence shows an office with different objects
(Figure 4). The closest object that can be detected
by the camera is a desk in the enlightened part of the
scene. Due to limitations of the camera used for the
recording, the closest object —the chair—, cannot be
selected. Even if the computation of stereoscopic dis-
parity creates many artifacts in the depth space, the
desk is still determined as the most salient object 70%
of the time. Here, the depth gradient is a mean to
smooth these artifacts, and allows the detection of the
desk in more than 90% of the sequence, which means
an increase of more than 25% of accuracy than when
depth alone is used.
4.2.2 Camera Moves
The camera moves towards some plants on the back-
ground (Figure 5). Again, even with the artifacts cre-
ated by the disparity computation, we obtain 70% of
good match. Including the gradient however reduces
the accuracy of results, because the movement is not
constant over the whole image. Thus some back-
ground objects have a higher gradient than foreground
ones, because they are farther away from the center
of the transformation the camera is subject to. An es-
timation of the camera motion could then give even
better results than the ones we get.
DEPTH-BASED DETECTION OF SALIENT MOVING OBJECTS IN SONIFIED VIDEOS FOR BLIND USERS
437

A
B
Figure 4: Results in the static case on the same image of the
video sequence, using depth only (A) or depth and gradient
(B). The detected FOA is indicated by a cross surrounded
by a cirle.
A
B
Figure 5: Good match (A) and false positive (B) when the
camera moves. The detected FOA is indicated by a cross
surrounded by a cirle.
4.2.3 Somebody Comes Towards the Camera
A person enters the office, walks towards the cam-
era (Figure 6), arrives close to a chair in the fore-
ground, then sits, partially out of the field of vision.
In this case, when using only depth, the objects de-
fined as salient are the closest ones. This means that
along the video sequence, the character is determined
as the most salient area only when touching the clos-
est object, which is the case in approximately a quar-
ter of the video sequence. The use of depth gradient
is clearly of interest in this case, since it doubles the
number of times the person is detected. Mostly, the
incorrect selected object is the chair because it is the
closest. Thus, giving more importance to the depth
gradient in Equation 4 would increase the selection of
the object of interest.
A
B
Figure 6: Results obtained when a person comes towards
the camera, with depth only (A) or depth and gradient (B),
on the same image of the video sequence. The detected
FOA is indicated by a cross surrounded by a cirle.
4.2.4 Somebody Leaves the Scene
The character is sitting on a chair, which is the closest
object, thus the one to find as the most salient (Fig-
ure 7). This person rises, walks towards the back-
ground of the scene, and finally disappears. Like in
the first case (where scene and camera are static), the
disparity computation creates a lot of artifacts. Then,
depth gradient acts as a smoothing filter, and drasti-
cally improves results that are already interesting. In
fact, in more than three images over four in the se-
quence, the expected object is selected as the most
salient.
Finally, the results obtained with this framework
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
438

Figure 7: The detected FOA (indicated by a cross sur-
rounded by a cirle) is the closest object from the camera.
are promising, knowing that the computation of dis-
parity is a challenging task, specially in real time.
Some optimizations on the distance function, the
computation of the conspicuity map from the depth
gradient feature map, and the combination of the dif-
ferent feature maps will likely lead to better results.
5 CONCLUSIONS AND
PERSPECTIVES
In order to develop a mobility aid for blind people,
we have presented in this article a new approach to
detect salient parts in videos, using a depth based
FOA mechanism. Depth gradient is introduced as a
new feature map in an already known visual attention
model. We have proved that this feature map allows
for a better detection of objects of interest in video
sequences when using depth only, as proposed in pre-
vious works (Ouerhani and H¨ugli, 2000; Jost et al.,
2004). We have also proposed a specific distance
function, in order to take into account both hardware
limitations and user’s choices ; this allows the user
to decide if objects closer than his/her cane should be
detected or not. The results we obtained with this sim-
ple framework are promising, and some optimizations
such as a more realistic distance function or the deter-
mination of optimal coefficients in Equation 4, should
lead to even better results.
Ongoing and future work concerns the following.
First, we will integrate some usual feature maps like
colour opposition, flicker, or motion, to ensure that
the depth gradient brings useful information in a vi-
sual attention model. The presented method will then
be integrated in the See ColOr framework. It is partic-
ularly important to decide how the salient area will be
sonified ; we do not want the user to be confused by
similar sounds meaning completely different things.
Once this will be done, the system will finally be eval-
uated by blind and blindfolded users.
ACKNOWLEDGEMENTS
We gratefully acknowledge the financial support of
the Swiss Hasler Foundation.
REFERENCES
Bay, H., Tuytelaars, T., and Gool, L. V. (2006). Surf:
Speeded up robust features. In Proceedings of the 9th
European Conference on Computer Vision, pages 7–
13.
Bologna, G., Deville, B., Pun, T., and Vinckenbosch, M.
(2007a). Identifying major components of pictures by
audio encoding of colors. In IWINAC2007, 2nd. In-
ternational Work-conference on the Interplay between
Natural and Artificial Computation.
Bologna, G., Deville, B., Pun, T., and Vinckenbosch, M.
(2007b). Transforming 3d coloured pixels into mu-
sical instrument notes for vision substitution applica-
tions. EURASIP Journal on Image and Video Process-
ing.
Hoffman, D. and Singh, M. (1997). Salience of visual parts.
Cognition, 63:29–78.
Itti, L., Koch, C., and Niebur, E. (1998). A model of
saliency-based visual attention for rapid scene anal-
ysis. IEEE Transactions on Pattern Analysis and
Machcine Intelligence, 20(11):1254–1259.
Jost, T., Ouerhani, N., von Wartburg, R., M¨uri, R., and
H¨ugli, H. (2004). Contribution of depth to visual at-
tention: comparison of a computer model and human.
In Early cognitive vision workshop, Isle of Skye, Scot-
land.
Kadir, T. and Brady, M. (2001). Scale, saliency and im-
age description. International Journal of Computer
Vision, 45(2):83–105.
Landragin, F. (2004). Saillance physique et saillance cogni-
tive. Cognition, Reprsentation, Langage, 2(2).
Lowe, D. (1999). Object recognition from local scale-
invariant features. In Seventh International Confer-
ence on Computer Vision (ICCV’99), volume 2.
Maki, A., Nordlund, P., and Eklundh, J. (1996). A computa-
tional model of depth-based attention. In Proceedings
of the International Conference on Pattern Recogni-
tion (ICPR ’96).
Milanese, R., Gil, S., and Pun, T. (1995). Attentive mech-
anism for dynamic and static scene analysis. Optical
Engineering, 34(8):2428–2434.
Ouerhani, N. and H¨ugli, H. (2000). Computing visual at-
tention from scene depth. In Proceedings of the 15th
International Conference on Pattern Recognition, vol-
ume 1, pages 375–378.
DEPTH-BASED DETECTION OF SALIENT MOVING OBJECTS IN SONIFIED VIDEOS FOR BLIND USERS
439
