
FREE-VIEW POINT TV WATERMARKING EVALUATED ON
GENERATED ARBITRARY VIEWS
Evlambios E. Apostolidis and Georgios A. Triantafyllidis
Informatics and Telematics Institute, Thessaloniki, Greece
Keywords: Free-view point TV, watermarking.
Abstract: The recent advances in Image Based Rendering (IBR) has pioneered a new technology, free view point
television, in which TV-viewers select freely the viewing position and angle by the application of IBR on
the transmitted multi-view video. In this paper, exhaustive tests were carried out to conclude to the best
possible free-view point TV watermarking evaluated on arbitrary views. The watermark should not only be
extracted from a generated arbitrary view, it should also be resistant to common video processing and multi-
view video processing operations.
1 INTRODUCTION
Image based rendering (IBR) has been developed in
the last ten years as an alternative to the traditional
geometry based rendering techniques. IBR aims to
produce a projection of a 3D scene for an arbitrary
view point by using a number of original camera
views of the scene. This approach contains the
original effects already in the original camera views
and consequently, yields more natural views
compared to the traditional geometry based methods,
which are modeled with one texture and additional
supporting textures that sometimes lacks natural
appearance. There are several advantages to this
approach:
• The display algorithms for image-based
rendering require modest computational resources
and are thus suitable for real-time implementation on
workstations and personal computers.
• The cost of interactively viewing the scene is
independent of scene complexity.
• The source of the pre-acquired images can be
from a real or virtual environment, i.e. from
digitized photographs or from rendered models. In
fact, the two can be mixed together.
Moreover, IBR is more preferable, since images
are easier to obtain and simpler to handle compared
to describing a geometric model, a texture and a
texture map in the traditional approach (Zhang and
Chen, 2004). Due to these advantages, IBR has
attracted much attention from researchers in vision
and signal processing and shown a great progress in
the last decade. Yet, it is possible to see real-time
demonstration of free-view TV, where TV-viewers
select freely the viewing position and angle on the
transmitted multi-view point video.
Figure 1: A general scheme for Free-Viewpoint
Television.
Free-view point video (see Fig. 1) is expected
to be a next-generation visual application (MPEG
Meeting, 2003). It provides the user with realistic
impressions by means of high interactivity and
photorealistic image quality. It lets the user freely
change his/her viewpoint (i.e., viewing position and
146
Apostolidis E. and Triantafyllidis G. (2008).
FREE-VIEW POINT TV WATERMARKING EVALUATED ON GENERATED ARBITRARY VIEWS.
In Proceedings of the Third International Conference on Computer Vision Theory and Applications, pages 146-151
DOI: 10.5220/0001084201460151
Copyright
c
SciTePress
viewing direction) and enjoy more photorealistic 3D
images. With these functionalities, it can be used for
various services, such as broadcasting, visual
communication, and education.
In this context, it is apparent that copyright
protection problems also exist and should be solved
for free-view TV. Among many alternative rights
management methods, the copyright problem for
visual data is also approached by means of
embedding hidden imperceptible information, called
watermark, into the image and video content (Koz
and Alatan, 2005). Hence, watermarking can also be
a good candidate for the solution of the copyright
problem for the free-view TV, as well. However, the
problem is more complicated compared to image
and mono-view video case.
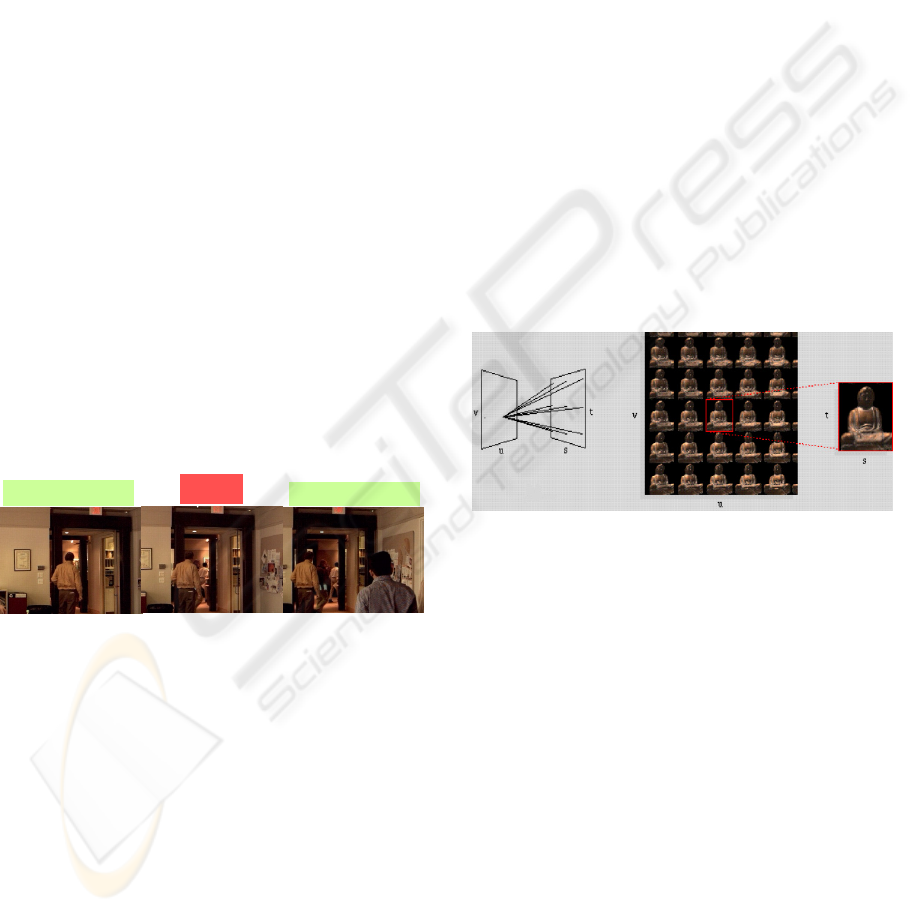
First of all, concerning with the robustness
requirement, the watermark should not only be
resistant to common video processing and multi-
view video processing operations, it should also be
extracted from a generated arbitrary view (Fig. 2). In
order to extract the watermark from such a rendered
view, the watermark detection scheme should
involve an estimation procedure for the imagery
camera position and orientation, where the rendered
view is generated. In addition, the watermark should
also be invisible and survive from image based
rendering operations, such as frame interpolation
between neighbour cameras and pixel interpolation
inside each camera frame
Figure 2: The watermarking problem for free view
television.
2 WATERMARKING
EMBEDDING AND
DETECTION
In the literature, the most well known and useful
IBR representation is the light field, due to its
simplicity that only the original images are used to
construct the imagery views. Therefore, the
proposed watermarking method is specially tailored
for the aim of watermark extraction from the
imagery views, which are generated by using light
field rendering.
In light field rendering (LFR), a light ray is
indexed as (u
0
,v
0
,s
0
,t
0
), where (u
0
,v
0
) and (s
0
,t
0
) are
the intersections of the light ray with the two parallel
planes namely, camera (uv) plane and focal (st)
plane. The planes are discretized so that a finite
number of light rays are recorded. If all the
discretized points from the focal plane are connected
to one point on the camera plane, an image (2D
array of light fields) is resulted. Actually, this
resulting image becomes sheared perspective
projection of the camera frame at that point (Levoy
and Hanrahan, 1996). 4D representation of light
field can also be interpreted as a 2D image array, as
it is shown in Fig. 3. The watermark is embedded to
each image of this 2D image array.
The proposed method embeds the watermark
into each image of the light field slab (Fig. 3) by
exploiting spatial sensitivity of HVS. For that
purpose, the watermark is modulated with the
resulting output image after filtering each light field
image by a high pass filter and spatially added to
that image.
Figure 3: A sample light field image array: Buddha light
field.
More specifically, the method applies the same
watermarking operation for each light field image as
follows:
),().,(.),(),(
*
tsWtsHtsItsI
uvuvuv
α
+=
(1)
where I
uv
is the light field image corresponding
to the camera at the (u,v) position, H
uv
is the output
image after high pass filtering,
α
is the global
scaling factor to adjust the watermark strength, W is
the watermark sequence, I
uv
*
is the watermarked
light field image. A correlation-based scheme is
proposed for watermark detection as depicted in Fig.
4.
extract
Embed watermark
Cam. 0 Cam. 1
Arbitrary view
Embed watermark
FREE-VIEW POINT TV WATERMARKING EVALUATED ON GENERATED ARBITRARY VIEWS
147

High pass
filtering
Normalized
correlation
Detection
High pass
filtering
W
Im.
1/0
Figure 4: Watermark detection.
3 EXPERIMENTAL RESULTS
Buddha light fields (The Stanford Light Field
Archive, 2007) are used during the simulations. We
tested various watermarking sequences (as shown in
Table 1) in order to conclude to the one with the best
performance
.
Table 1: Watermark test sequences.
No DISTRIBUTION MATLAB CODE
1
Chi-Square random(‘chi2’ , v , 256 , 256)
2
Exponential random(‘exp’ , μ , 256 , 256)
3
Geometric random(‘geo’ , p , 256 , 256)
4
Poisson random(‘poiss’ , λ , 256 , 256)
5
Rayleigh random(‘rayl’ , b , 256 , 256)
6
Beta random(‘beta’ , a , b , 256 , 256)
7
Binomial random(‘bino’, n , p , 256 , 256)
8
Extreme Value random(‘ev’, μ , σ , 256 , 256)
9
Gamma random(‘gam’ , a , b , 256 , 256)
10
Negative Binomial random(‘nbin’ , p , r , 256 , 256)
11
Normal (Gaussian) random(‘norm’ , μ , σ , 256 , 256)
12
Uniform random(‘unif’ , a , b , 256 , 256)
13
Weibull random(‘wbl’, a , b , 256 , 256)
14
Generalized Pareto random(‘gp’, κ , σ , θ , 256 , 256)
15
Hypergeometric random(‘hyge’, M , K , n , 256,256)
We also tested the sequences: Extreme Value,
F, Non-central F, Lognormal, Student’s distribution
and Non-central T distributions which however did
not yield acceptable results and as a result are not
considered further.
As it was stated in the introduction, the main
problem in watermarking of free view point video is
the successful extraction of the watermark from a
random generated view. So, we tested the
watermarks efficiency on imaginary views created
by rendering procedures on the source data of
Buddha’s images. The creation of a rendered view
from the light field of Buddha’s images requires the
determination of some characteristics:
First thing is the interpolation method for the
construction of the rendered view. We selected to
have two choices:
1. Bilinear Interpolation.
2. Nearest Neighborhood Interpolation.
Secondly is the viewing position or the
determination of the imagery camera’s spot. This
spot is determined by two elements:
1. The coordinates of the spot of virtual
camera.
2. The orientation, as a vector with
coordinates, for the virtual camera.
Figure 5: Configurations for the imagery camera position
and rotation.
In (Apostolidis, Koz and Triantafyllidis, 2007),
tests are carried out for the cases 1 and 2 (see Fig. 5)
where the imagery camera is located in the camera
plane. In this paper, we focus on case 3 where the
imagery camera is in an arbitrary position and its
rotation is not unity. More specifically we select 4
positions of the imagery camera (within case 3) in
order to include all the possible viewing positions of
case 3 (zoom in and out, rotation left or right). Figs
6,7,8,9 illustrate the four data sets that are used for
our experimental results.
(a) (b)
Figure 6: Test 1: Imagery camera rendered views with
zoom in.
(a): Nearest Neighborhood
(b): Bilinear
Virtual camera’s adjustment:
Camera’s center coordinates: [0, 0, 1.8]
Orientation Vector: [0, 0, 1]
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
148

(a) (b)
Figure 7: Test 2: Imagery camera rendered views with
zoom out.
(a): Nearest Neighborhood
(b): Bilinear
Virtual camera’s adjustment:
Camera’s center coordinates: [0, 0, 2.5]
Orientation Vector: [0, 0, 1]
(a) (b)
Figure 8: Test 3: Imagery camera rendered views with
zoom in and left rotation.
(a): Nearest Neighborhood
(b): Bilinear
Virtual camera’s adjustment:
Camera’s center coordinates: [0.4, 0, 1.8]
Orientation Vector: [0, 0, 1]
(a) (b)
Figure 9: Test 4: Imagery camera rendered views with
zoom out and right rotation.
(a): Nearest Neighborhood
(b): Bilinear
Virtual camera’s adjustment:
Camera’s center coordinates: [-0.5, 0, 2.5]
Orientation Vector: [-0.3, 0, 1]
We evaluated the performance of the watermark
sequences in terms of their robustness and
imperceptibility using a blind detection scheme. The
watermarks were tested in cases of zooming and
rotation in order to conclude to the most robust
watermarks. Obviously, the best possible watermark
sequence must show the following properties:
- Big PSNR of the watermarked view to ensure
high image quality.
- Big Correlation of the watermark with the
watermarked view to ensure easy (blind) detection.
Our aim is to find a satisfactory balance between
PSNR and Correlation that combines robustness of
watermark and good quality of the view. We tested
the 15 distributions (of Table 1) as watermarks using
the watermarking procedure described in Section 2.
Taking into account the results reported in
(Apostolidis, Koz and Triantafyllidis, 2007) for the
cases 1 and 2 (see Fig. 5) where the imagery camera
is located in the camera plane, we narrowed our tests
to the following distributions that succeed better in
combining robustness of watermark and good
quality of the view:
• Beta Distribution
• Extreme Value Distribution
• Normal (Gaussian) Distribution
• Exponential Distribution
• Negative Binomial Distribution
The next step is to determine all the parameters for
each of these five distributions in order to produce
the best possible results in terms of robustness and
imperceptibility for the case 3. Five data sets for
these “best” parameters of each of the five
distributions are listed in Table 2.
In Table 3, the results are given for the four tests
mentioned above according to:
- The interpolation method for the construction of
the rendered view (Nearest Neighborhood / Bilinear
Interpolation).
- The data sets of the parameters for each of the five
selected distributions.
For each of these tests, we calculated the PSNR
and correlation values in order to evaluate the data
sets and distributions in terms of robustness and
imperceptibility using blind detection. The signs “+”
and “–” indicate the efficiency of the corresponding
data set of the distribution.
FREE-VIEW POINT TV WATERMARKING EVALUATED ON GENERATED ARBITRARY VIEWS
149

Table 2: For each distribution, five data sets of the
parameters that produce the best results.
Data
set 1
Data
set 2
Data
set 3
Data
set 4
Data
set 5
Beta
Par. 1 0,25 0,5 0,75 1 1,5
Par. 2 0,75 1,25 0,25 0,75 1,25
Filter 0,7 0,85 0,9 0,9 0,9
Scalar 0,1 0,15 0,15 0,1 0,15
Extreme Value
Par. 1 0,25 0,5 0,5 0,75 1,25
Par. 2 0,25 0,25 0,75 0,25 0,5
Filter 0,9 0,9 0,9 0,9 0,9
Scalar 0,25 0,1 0,1 0,1 0,1
Normal / Gaussian
Par. 1 0 0 0,75 1 1
Par. 2 0,25 0,5 0,25 0,25 0,5
Filter 0,75 0,7 0,8 0,8 0,9
Scalar 0,15 0,1 0,1 0,1 0,1
Exponential
Par. 1 0,5 0,3 0,2 0,2 0,1
Filter 0,9 0,75 0,7 0,75 0,85
Scalar 0,15 0,15 0,15 0,2 0,25
Negative Binomial
Par. 1 0,1 0,3 0,7 0,7 0,9
Par. 2 0,7 0,7 0,9 0,9 0,9
Filter 0,9 0,85 0,7 0,9 0,85
Scalar 0,15 0,2 0,2 0,25 0,15
Table 3: Results for the five selected distributions and the
corresponding five selected data sets. Please note that “+”
means more efficient result in terms of robustness and
imperceptibility using blind detection, while “-” means
that the result is less sufficient (a predefined threshold has
been used for the PSNR and correlation values).
Beta Distribution
Nearest Neighborhood / Bilinear Interpolation
Test 1 Test 2 Test 3 Test 4
Data
Set1
+ / - + / - + / + - / -
Data
Set2
+ / + - / + + / - - / +
Data
Set3
- / - + / + + / + - / -
Data
Set4
+ / - - / - - / - + / +
Data
Set5
+ / + + / - - / + + / -
Extreme Value Distribution
Nearest Neighborhood / Bilinear Interpolation
Test 1 Test 2 Test 3 Test 4
Data
Set1
+ / - - / - - / + + / +
Data
Set2
+ / - - / - + / + - / -
Data
Set3
- / - + / + + / + - / +
Data
Set4
+ / - - / - - / + - / +
Data
Set5
+ / + - / + + / - + / +
Normal / Gaussian Distribution
Nearest Neighborhood / Bilinear Interpolation
Test 1 Test 2 Test 3 Test 4
Data
Set1
+ / + + / + - / + - / -
Data
Set2
- / - - / - + / + - / +
Data
Set3
+ / - + / + - / + - / +
Data
Set4
+ / - + / + + / - + / +
Data
Set5
- / + - / + + / + + / +
Exponential Distribution
Nearest Neighborhood / Bilinear Interpolation
Test 1 Test 2 Test 3 Test 4
Data
Set1
+ / + + / + - / + + / +
Data
Set2
- / - - / + - / + - / -
Data
Set3
+ / + + / + + / - - / +
Data
Set4
+ / + + / - - / - - / -
Data
Set5
- / + - / + - / + + / -
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
150

Negative Binomial Distribution
Nearest Neighborhood / Bilinear Interpolation
Test 1 Test 2 Test 3 Test 4
Data
Set1
- / - + / - - / - - / -
Data
Set2
- / - - / - + / - + / +
Data
Set3
+ / - - / - - / - + / -
Data
Set4
- / + - / - - / + - / -
Data
Set5
+ / + + / - - / - + / +
Taking into account the “+” and “–” for the
data sets of the distribution, we can conclude to the
best possible data sets as listed in Table 4:
Table 4: “Winning” data sets and distributions.
Normal/
Gaussian
distribution
Data Set 5
Parameter a=1
Parameter b=0.5
Filter Cutoff=0.9
Scalar Factor=0.1
Exponential
distribution
Data Set 1
Parameter a=0.1
Filter Cutoff=0.85
Scalar Factor=0.25
4 CONCLUSIONS
In free view point video, the user might record a
personal video for an arbitrarily selected view and
misuse the content, so it is apparent that copyright
protection problems should be solved for free-view
TV.
In this paper we employed several distributions
as watermark sequences and we tested them in terms
of robustness and imperceptibility.
ACKNOWLEDGEMENTS
This work was supported by the General Secretariat
of Research and Technology Hellas under the
InfoSoc "TRAVIS: Traffic VISual monitoring"
project and the EC under the FP6 IST Network of
Excellence: "3DTV-Integrated Three-Dimensional
Television - Capture, Transmission, and Display"
(contract FP6-511568). The authors should like to
thank A. Koz for his valuable help.
REFERENCES
Zhang, C., and Chen, T., 2004. A survey on image based
rendering-representation, sampling and compression.
In Signal Processing: Image Communications, vol. 19,
pp 1-28.
MPEG Meeting, 2003. Applications and Requirements for
3DAV, document N5877, Trondheim, Norway.
Koz, A., and Alatan A.A, 2005. Oblivious Video
Watermarking Using Temporal Sensitivity of HVS. In
IEEE International Conference on Image Processing,
Vol. 1, pp 961 – 964.
Levoy, M., Hanrahan, P., 1996. Light field rendering. In
Computer Graphics (SIGGRAPH’96), New Orleans,
pp. 31–42.
Koz, A., Çıgla C., and Alatan, A.A., 2006. Free-view
Watermarking for Free-view Television. In IEEE
International Conference on Image Processing 2006,
Atlanta, GA, USA.
The Stanford Light Field Archive, 2007.
http://graphics.stanford.edu/software/lightpack/lifs.ht
ml
Apostolidis, E., Koz A., and Triantafyllidis G.A., 2007.
Best Watermarking Selection for Free-View Point
Television. In 14th International Conference on
systems, Signals and Image Processing IWSSIP 2007
and 6th EURASIP Conference Focused on Speech and
Image Processing, Multimedia Communications and
Services EC-SIPMCS 2007, Maribor, Slovenia.
FREE-VIEW POINT TV WATERMARKING EVALUATED ON GENERATED ARBITRARY VIEWS
151
