
OMNIDIRECTIONAL CAMERA MOTION ESTIMATION
Akihiko Torii and Tom´aˇs Pajdla
Center for Machine Perception, Department of Cybernetics, Faculty of Elec. Eng.
Czech Technical University in Prague, Karlovo n´am. 13, 121 35, Prague, Czech Republic
Keywords:
Camera Motion Estimation, Omnidirectional Images, Epipolar Geometry.
Abstract:
We present an automatic technique for computing relative camera motion and simultaneous omnidirectional
image matching. Our technique works for small as well as large motions, tolerates multiple moving objects
and very large occlusions in the scene. We combine three principles and obtain a practical algorithm which
improves the state of the art. First, we show that the correct motion is found much sooner if the tentative
matches are sampled after ordering them by the similarity of their descriptors. Secondly, we show that the
correct camera motion can be better found by soft voting for the direction of the motion than by selecting
the motion that is supported by the largest set of matches. Finally, we show that it is useful to filter out the
epipolar geometries which are not generated by points reconstructed in front of cameras. We demonstrate the
performance of the technique in an experiment with 189 image pairs acquired in a city and in a park. All
camera motions were recovered with the error of the motion direction smaller than 8
◦
, which is 4 % of the
183
◦
field of view, w.r.t. the ground truth.
1 INTRODUCTION
Projections of scene points into images acquired by
a moving camera are related by epipolar geome-
try (Hartley and Zisserman, 2004). In this work, we
present a practical algorithm which improves the state
of the art automatic camera relative motion computa-
tion and simultaneous image matching. Such an algo-
rithm is a useful building block for autonomous nav-
igation and building large 3D models using structure
from motion.
In contrary to existing structure from motion al-
gorithms, e.g. (2d3 Ltd, ; Davison and Molton, 2007;
Cornelis et al., 2006; Williams et al., 2007), which
solve the problem when the camera motion is small or
once 3D structure is initialized, we aim at a more gen-
eral situation when neither the relationship between
the cameras nor the structure is available. In such
case, 2-view camera matching and relative motion es-
timation is a natural starting point to camera tracking
and structure from motion. This is an approach of
the state of the art wide base-line structure from mo-
tion algorithms e.g. (Brown and Lowe, 2003; Mar-
tinec and Pajdla, 2007) that start with pair-wise im-
age matches and epipolar geometries which they next
clean up and make them consistent by a large scale
bundle adjustment.
In this paper, we improve the state of the art ap-
proach to automatic computation of relative camera
motion (Hartley and Zisserman, 2004; Nist´er and En-
gels, 2006) and simultaneous image matching (Pritch-
ett and Zisserman, 1998; Tuytelaars and Gool, 2000;
Schaffalitzky and Zisserman, 2001; Matas et al.,
2004) by combining three ingredients which alto-
gether significantly increase the quality of the result.
To illustrate the problemwe shall now discuss four
interesting examples of camera motions which have
gradually increasing level of difficulty.
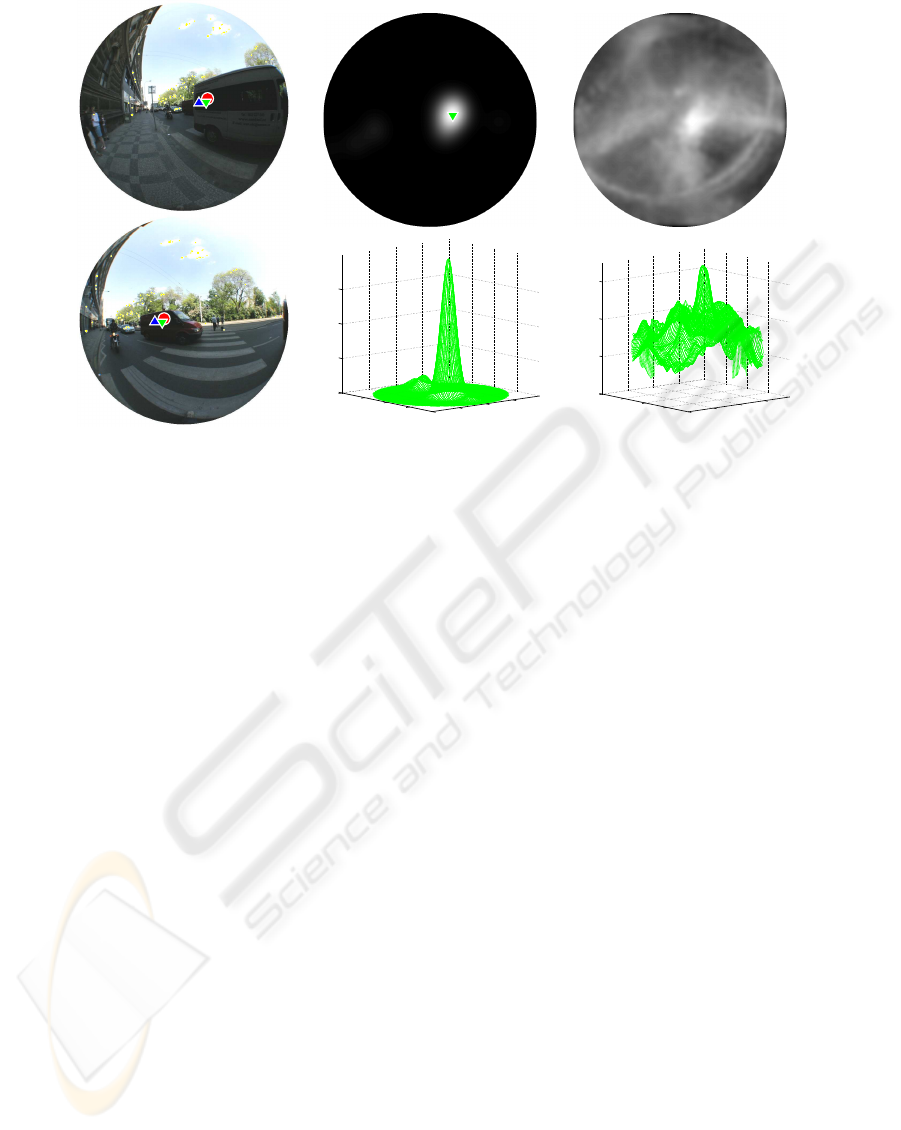
Figure 1(a) shows an easy pair which can be
solved by a standard RANSAC estimation (Hartley
and Zisserman, 2004). 57%, i.e. 1400, of tentative
matches are consistent with the true motion. Fig-
ure 1(c) shows a dominant peak in the data likelihood
p(M|e) of matches given the motion direction (Nist´er
and Engels, 2006) meaning that there is only one
motion direction which explains a large number of
matches.
Figure 2(a) shows a more difficult pair that con-
tains multiple moving objects, large camera rotation
and considerable occlusion in the scene. Only 8%,
i.e. 120, tentative matches were consistent with the
true motion. Figure 2(c) shows that there are many
577
Torii A. and Pajdla T. (2008).
OMNIDIRECTIONAL CAMERA MOTION ESTIMATION.
In Proceedings of the Third International Conference on Computer Vision Theory and Applications, pages 577-584
DOI: 10.5220/0001084505770584
Copyright
c
SciTePress

motion directions with high support, in this case from
wrong tentative matches.
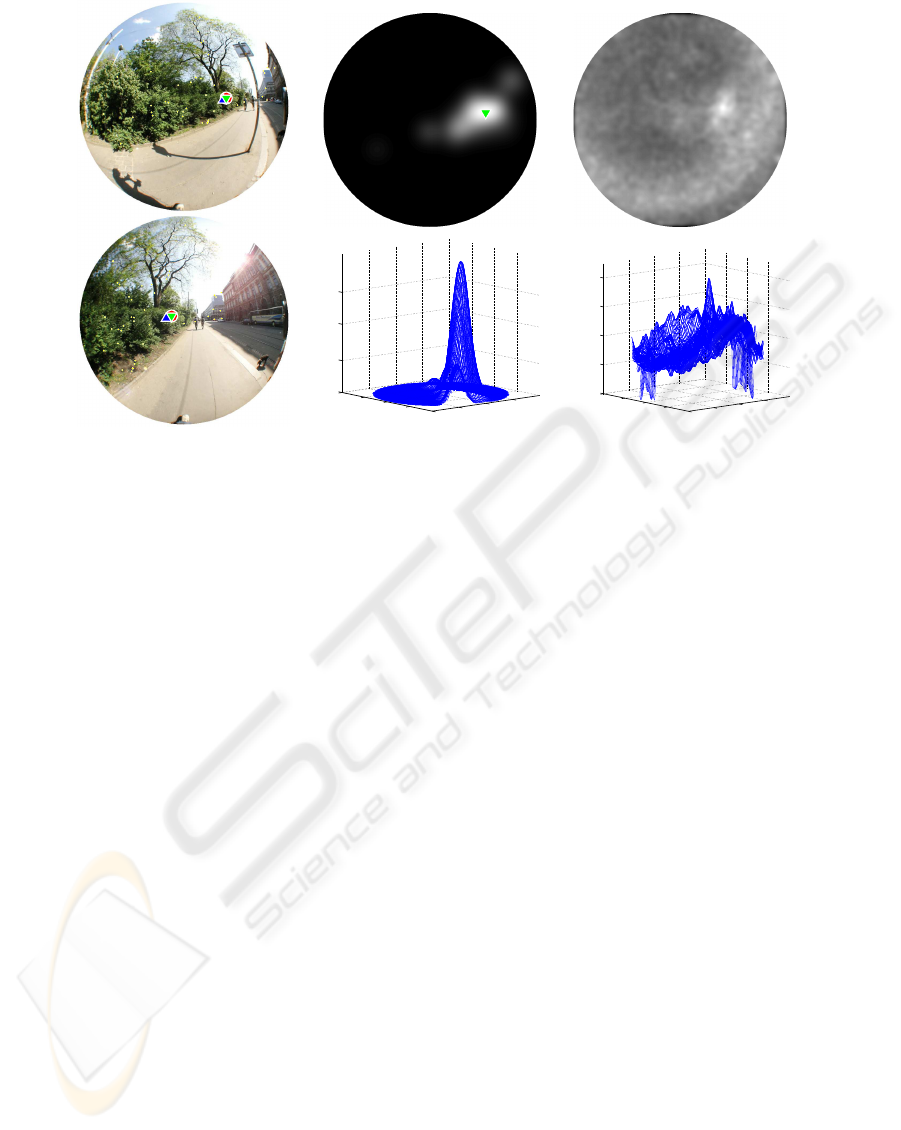
Figure 3(a) shows an even more difficult pair since
only 1.4%, i.e. 50, tentative matches are consistent
with the true motion. There are very many wrong ten-
tative matches on bushes where local image features
are all small and green. Thus, many motion directions
get high support from wrong matches. The true mo-
tion has the highest support but its peak is very sharp
and thus difficult to find in limited time.
Figure. 4(a) shows a very difficult pair that con-
tains large camera rotation and many repetitive fea-
tures which generate wrong tentative matches. In this
case, the motion supported by the largest number of
tentative matches is incorrect. Notice that the peak of
the likelihood of matches in Fig. 4(c) does not corre-
spond to the direction of the true motion.
All the above examples can be solved correctly by
the technique presented in this paper.
The state of the art technique for finding
relative camera orientations from image matches
first establishes tentative matches by pairing image
points with mutually similar features and then uses
RANSAC (Fischler and Bolles, 1981; Hartley and
Zisserman, 2004; Chum and Matas, 2005) to look for
a large subset of the set of tentative matches which
is, within a predefined threshold θ, consistent with
an epipolar geometry (Hartley and Zisserman, 2004).
Unfortunately, this strategy does not always recover
the epipolar geometry generated by the actual cam-
era motion. This has been observed, e.g., in (Li and
Hartley, 2005).
Often, there are more models which are supported
by a large number of matches. Thus the chance that
the correct model, even if it has the largest support,
will be found by running a single RANSAC is small.
Work (Li and Hartley, 2005) suggested to generate
models by randomized sampling as in RANSAC but
to use soft (kernel) voting for a physical parameter,
the radial distortion coefficient in that case, instead
of looking for the maximal support. The best model
is then selected as the one with the parameter closest
to the maximum in the accumulator space. This strat-
egy works when the correct, or almost correct, models
met in the sampling provide consistent values of the
parameter while the incorrect models with high sup-
port generate different values of the parameter. Here
we show that this strategy works also when used for
voting in the space of motion directions.
It has been demonstrated in (Chum and Matas,
2005) that ordering the tentative matches by their
similarity may help to reduce the number of sam-
ples in RANSAC. Paper (Chum and Matas, 2005)
brought two main contributions. First, PROSAC sam-
pling strategy has been suggested which allows to uni-
formly sample from the list of tentative matches or-
dered ascendingly by the distance of their descriptors.
It allows to start by drawing promising samples first
and often hit sufficiently large configuration of good
matches early. The second contribution concerned a
modification of the RANSAC stoping criterion (Hart-
ley and Zisserman, 2004, p. 119) to be able to deal
with very long sets of tentative matches without the
necessity to know their number beforehand.
When working with perspective images, it is gen-
erally accepted (Hartley and Zisserman, 2004) that
the best way to evaluate the quality of an epipolar
geometry is to look at image reprojection errors. This
is, for two images, equivalent to evaluating the dis-
tances of image points to their corresponding epipolar
lines. We compared the image reprojection error with
the residuals evaluated as the angle between rays and
their corresponding epipolar planes, which we refer
as the angular error here. In our experience, when
cameras are calibrated, the angular error can safely be
used instead of the image reprojection error. To be
absolutely correct, every ray should be accompanied
by a covariance matrix determining its uncertainty.
The matrix depends on (i) image measurement error
model and (ii) on the point position in the image. The
point position determines how the unit circle around
the point maps into the cone around the ray. In this
paper we neglected the variability of the covariance
matrix across the field of view and assumed it to be a
scaled identity.
Next we describe how we combine ordered sam-
pling of tentative matches, soft voting, and the ori-
entation (cheirality) constraint (Hartley and Zisser-
man, 2004) on minimal five points used for comput-
ing camera motions to get an algorithm which solves
all camera motions.
2 THE ALGORITHM
Algorithm 1 presents the pseudocode of the algorithm
used to generate results described in this work. Next
we describe the key parts of the algorithm in detail.
2.1 Detecting Tentative Matches and
Computing their Descriptors
MSER (Matas et al., 2004), Harris-Affine and
Hessian Affine (Mikolajczyk et al., 2005) affine
covariant feature regions are detected in images.
These features are alternative to popular SIFT fea-
tures (Lowe, 2004) and work comparably in our situ-
ation. Parameters of the detectors are chosen to limit
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
578

(a)
0.75
0.25
0
0.5
(b)
0.1
0.2
0.3
0.4
0.5
(c)
Figure 1: An easy example of camera motions. (a): Fist (top) and second (bottom) images. Red ◦, blue △, and green ▽ (our
result) represent the true epipole, the epipole computed by maximizing the support, and the epipoles computed by soft voting
for the position of the epipole, respectively. Small dots show the matches giving green ▽. (b): Voting space for the motion
direction in the first image generated by 50 soft votes casted by the result of 500-sample PROSAC, visualized on the image
plane (top) as a 3D plot (bottom). White represents large number of votes. The peak corresponds to green ▽ (our result). (c):
The maximal support for every epipole (i.e. CIF image from (Nist´er and Engels, 2006)). White represents hight support. The
image space has been uniformly sampled by 10000 epipoles and for each epipole the size of support of the best model found
by 500-sample PROSAC has been recorded.
the number of regions to 1-2 thousands per image.
The detected regions are assigned local affine frames
(LAF) (Obdrˇz´alek and Matas, 2002) and transformed
into standard positions w.r.t. their LAFs. Discrete
Cosine Descriptors (Obdrˇz´alek and Matas, 2003) are
computed for each region in the standard position. Fi-
nally, mutual distances of all regions in one image
and all regions in the other image are computed as
the Euclidean distances of their descriptors and tenta-
tive matches are constructed by selecting the mutually
closest pairs.
MSER region detector is approximately 100 times
faster than the Harris and Hessian Affine region de-
tector but MSERs alone were not able to solve all im-
age pairs in our data. MSERs perform great in ur-
ban environment with contrast regions, such as win-
dows, doors and markings. However, they often pro-
vide many useless regions on natural scenes because
they tend to extract contrast regions which often do
not correspond to real 3D structures, such as regions
formed by tree branches against the sky or shadows
casted by leaves.
2.2 Ordered Randomized Sampling
We use ordered sampling as suggested in (Chum and
Matas, 2005) to draw samples from tentative matches
ordered ascendingly by the distance of their descrip-
tors. We keep the original RANSAC stopping crite-
rion (Hartley and Zisserman, 2004) and we limit the
maximum number of samples to 500. We have ob-
served that pairs which could not be solved by the
ordered sampling in 500 samples got almost never
solved even after many more samples. Using the stop-
ping criterion from (Chum and Matas, 2005) often
leads to ending the sampling prematurely since the
criterion is designed to stop as soon as a large non-
random set of matches is found. Our objective is,
however, to find a globally optimal model and not to
stop as soon as a local model with large support is
found.
We have observed that there are often several al-
ternative models with the property that the correct
model of the camera motion has a similar or only
slightly larger support than other models which are
not correct. Algorithm 1 would provide almost identi-
cal results even without the RANSAC stopping crite-
rion but the criterion helps to end simple cases sooner
OMNIDIRECTIONAL CAMERA MOTION ESTIMATION
579
(a)
0.42
0.28
0.14
0
(b)
0.02
0.04
0.06
0.08
(c)
Figure 2: A more difficult example of camera motions. See Fig. 1.
than after 500 samples.
Having a calibrated camera, we draw 5-tuples of
tentative matches from the list M = [m]
N
1
of tentative
matches ordered ascendingly by the distance of their
descriptors. From each 5-tuple, relative orientation
is computed by solving the 5-point minimal relative
orientation problem for calibrated cameras (Nist´er,
2004; Stew´enius, 2005).
Row (sim) in Fig. 5 shows that many more cor-
rect motions have been sampled in 500 samples of
PROSAC using ordered matches than by using the
same number of samples on a randomly ordered list
of matches, row (rnd).
2.3 Orientation Constraint
An essential matrix can be decomposed into four dif-
ferent camera and point configuration which differ by
the orientation of cameras and points (Hartley and
Zisserman, 2004). Without enforcing the constraint
that all points have to be observed in front of the cam-
eras, some epipolar geometries may be supported by
many matches but it need not be possible to recon-
struct all points in front of both cameras.
For omnidirectional cameras, the meaning of in-
frontness is a generalization of the classical infront-
ness for perspective cameras. With perspective cam-
eras, a point X is in front of the camera when it has a
positive z coordinate in the camera coordinate system.
For omnidirectional cameras, a point X is in front of
the camera if its coordinates can be written as a posi-
tive multiple of the direction vector which represents
the half-ray by which X has been observed.
In general, it is beneficial to use only those
matches which generate points in front of cameras.
However, this takes time to verify it for all matches.
On the other hand, it is fast to verify whether the five
points in the minimal sample generating the epipolar
geometry can be reconstructed in front of both cam-
eras and to reject such epipolar geometries which do
not allow it.
Row (oc) in Fig. 5 shows that the number of incor-
rectly estimated motions decreased when such epipo-
lar geometries were excluded by this orientation con-
straint.
Furthermore, the orientation constraint in average
reduces the computational cost because it avoids eval-
uating residuals corresponding to many wrong cam-
era motions.
2.4 Soft Voting
In this paper, we vote in two-dimensional accumu-
lator for the estimated motion direction. However,
unlike in (Li and Hartley, 2005; Nist´er and Engels,
2006), we do not cast votes directly by each sampled
epipolar geometry but by the best epipolar geome-
tries recovered by ordered sampling of PROSAC.
This way the votes come only from the geometries
that have very high support. We can afford to com-
pute more, e.g. 50, epipolar geometries since the
ordered sampling is much faster than the standard
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
580
(a)
0.22
0.15
0.07
0
(b)
0.006
0.008
0.01
0.012
0.014
(c)
Figure 3: Even more difficult example of camera motions. See Fig. 1.
RANSAC. Altogether, we need to evaluate maximally
500 × 50 = 25000 samples to generate 50 soft votes,
which is comparable to running a standard 5-point
RANSAC for expected contamination by 84 % of
mismatches (Hartley and Zisserman, 2004, p. 119).
Yet, with our technique, we could go up to 98.5 %
of mismatches with comparable effort. The relative
camera orientation with the motion direction closest
to the maximum in the voting space is finally selected.
Figure 5 shows the improvementof using soft vot-
ing for finding the relative motion when casting 50
soft votes. On several difficult image pairs, such as
Fig. 4, the motion supported by the largest number
of tentative matches was incorrect but the soft voting
provided a motion close to the ground truth.
3 EXPERIMENT
3.1 Image Data
Experimental data consist of 189 image pairs ob-
tained by selecting consecutive images of an image
sequence. We do not use the fact that images were
taken in a sequence and our method works for any
pair of images. The distance between two consecutive
images was 1-3 meters. Most of the camera motions
have rotations up to 15
◦
but large rotations of 45
◦
are also present. Images were acquired by Kyocera
Finecam M410R with Nikon FC-E9 fisheye-lens with
183
◦
view angle. The image projection is equiangu-
lar and was internally calibrated (Miˇcuˇs´ık and Pajdla,
2006) beforehand. Images were digitized in resolu-
tion 800 pixels/183
◦
, i.e. 0.2
◦
/pixel, which is com-
parable to 240 × 180 pixels for more standard 40
◦
view angle. Acquisition of images started in a narrow
street with buildings on both sides, then continued to
a wider street with many driving cars, and finally lead
to a park with threes, bushes and walking people.
3.2 Ground Truth Motion
For most image pairs, the “true” camera motions were
recovered by running the Algorithm 1 a number of
times and checking that (i) the true motion has been
repeatedly generated by correctly matched 5-tuples
of matches and that (ii) the motion direction pointed
to the same object in both images. In a few image
pairs, for which we could not get a decisive number
of consistent results, the true motion has been gener-
ated from a 5-tuple of correct matches selected man-
ually. We estimate the precision of our ground truth
motion estimation to be higher than 4 % of the view
field, which corresponds to 8
◦
and 32 image pixels.
3.3 Result
Figure 5(SV) shows the quality of the estimated cam-
era motion by Algorithm 1. The algorithm looks for
the motion with motion direction closest to the global
maximum in the accumulator after casting soft votes
OMNIDIRECTIONAL CAMERA MOTION ESTIMATION
581

(a)
0.52
0.34
0.17
0
(b)
0.04
0.07
0.1
0.13
(c)
Figure 4: A very difficult example of camera motions. See Fig. 1. The motion direction with the largest support of 294
matches (b) is wrong. Our algorithm 1 finds the correct motion which is supported “only” by 287 matches.
from 50 motions. The 50 motions for soft votesare es-
timated in 500 samples by the ordered sampling based
on residuals evaluated as the angle between rays and
their corresponding epipolar planes. All motions in
our test data were estimated with motion directions
within 8
◦
, i.e. 4 % of the view angle, from the ground
truth.
4 CONCLUSIONS
We have presented a practical algorithm which can
compute camera motions from omnidirectional im-
ages. We have improved the state of the art by com-
bining ordered sampling from tentative matches or-
dered by their descriptor similarity with the orienta-
tion constraintand soft voting. We used angular resid-
ual error which better fits to the geometry of omni-
directional cameras. Our algorithm was able to cor-
rectly compute motions of all tested 189 image pairs.
ACKNOWLEDGEMENTS
The authors were supported by EC project FP6-IST-
027787 DIRAC and by Czech Government under the
reseach program MSM6840770038. Any opinions
expressed in this paper do not necessarily reflect the
views of the European Community. The Community
is not liable for any use that may be made of the in-
formation contained herein.
REFERENCES
2d3 Ltd. Boujou. http://www.2d3.com.
Brown, M. and Lowe, D. G. (2003). Recognising panora-
mas. In ICCV ’03, Washington, DC, USA.
Chum, O. and Matas, J. (2005). Matching with PROSAC
- progressive sample consensus. In CVPR ’05, vol-
ume 1, pages 220–226, Los Alamitos, USA.
Cornelis, N., Cornelis, K., and Gool, L. V. (2006).
Fast compact city modeling for navigation pre-
visualization. In CVPR ’06, pages 1339–1344, Wash-
ington, DC, USA.
Davison, A. J. and Molton, N. D. (2007). Monoslam: Real-
time single camera slam. IEEE Transactions on Pat-
tern Analysis and Machine Intelligence, 29(6):1052–
1067.
Fischler, M. A. and Bolles, R. C. (1981). Random sample
consensus: a paradigm for model fitting with appli-
cations to image analysis and automated cartography.
Commun. ACM, 24(6):381–395.
Hartley, R. I. and Zisserman, A. (2004). Multiple View
Geometry in Computer Vision. Cambridge University
Press, ISBN: 0521540518, second edition.
Li, H. and Hartley, R. (2005). A non-iterative method for
correcting lens distortion from nine point correspon-
dences. In OMNIVIS ’05.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
582

20 40 60 80 100 120 140 160 180
rnd
sim
oc
MS
SV
Image number
Figure 5: Camera motion estimation obtained by the ordered sampling, orientation constraint, and soft voting. The graph
shows the number of camera motion directions that are not further than 8
◦
from the ground truth as a function of the image
pair (i,i + 1) with i on the horizontal axis. Lighter color represents higher numbers. The motion directions were computed
from the first 500 5-point samples drawn from tentative matches ordered randomly, row (rnd), and tentative matches ordered
by their similarity, row (sim). Ordering of tentative matches by similarity greatly increased the number of correctly estimated
epipoles. Row (oc) shows the number of epipolar geometries for which the 5 points of their generating minimal sample get
reconstructed in front of both cameras (orientation constraint). Using the orientation constraint further improves the result.
Row (MS) shows whether the motion direction, which is supported by the largest number of tentative matches in 50 motions,
is (black) or is not (white) more than 8
◦
apart from the true motion direction. Row (SV) shows whether the estimated motion
direction, which is closest to the global maximum in the accumulator, is (black) or is not (white) more than 8
◦
apart from the
true motion direction. This is the best strategy for estimating the camera motion.
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. International Journal of Com-
puter Vision, 60(2):91–110.
Martinec, D. and Pajdla, T. (2007). Robust rotation and
translation estimation in multiview reconstruction. In
CVPR ’07, Minneapolis, MN, USA.
Matas, J., Chum, O., Urban, M., and Pajdla, T. (2004).
Robust wide-baseline stereo from maximally stable
extremal regions. Image and Vision Computing,
22(10):761–767.
Miˇcuˇs´ık, B. and Pajdla, T. (2006). Structure from motion
with wide circular field of view cameras. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence,
28(7):1135–1149.
Mikolajczyk, K., Tuytelaars, T., Schmid, C., Zisserman, A.,
Matas, J., Schaffalitzky, F., Kadir, T., and Gool, L. V.
(2005). A comparison of affine region detectors. Inter-
national Journal of Computer Vision, 65(1-2):43–72.
Nist´er, D. (2004). An efficient solution to the five-point
relative pose problem. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 26(6):756–777.
Nist´er, D. and Engels, C. (2006). Estimating global un-
certainty in epipoloar geometry for vehicle-mounted
cameras. In SPIE, Unmanned Systems Technology
VIII, volume 6230.
Obdrˇz´alek,
ˇ
S. and Matas, J. (2002). Object recognition us-
ing local affine frames on distinguished regions. In
BMVC ’02, volume 1, pages 113–122, London, UK.
Obdrˇz´alek,
ˇ
S. and Matas, J. (2003). Image retrieval us-
ing local compact dct-based representation. In DAGM
’03, number 2781 in LNCS, pages 490–497, Berlin,
Germany.
Pritchett, P. and Zisserman, A. (1998). Wide baseline stereo
matching. In ICCV ’98, pages 754–760, Bombay, In-
dia.
Schaffalitzky, F. and Zisserman, A. (2001). Viewpoint in-
variant texture matching and wide baseline stereo. In
ICCV ’01, Vancouver, Canada.
Stew´enius, H. (2005). Gr¨obner Basis Methods for Minimal
Problems in Computer Vision. PhD thesis, Centre for
Mathematical Sciences LTH, Lund University, Swe-
den.
Tuytelaars, T. and Gool, L. V. (2000). Wide baseline stereo
matching based on local, affinely invariant regions. In
BMVC ’00, Bristol, UK.
Williams, B., Klein, G., and Reid, I. (2007). Real-time slam
relocalisation. In ICCV ’07, Rio de Janeiro, Brazil.
OMNIDIRECTIONAL CAMERA MOTION ESTIMATION
583

Algorithm 1 Camera motion estimation by orderedsampling from tentative matches with geometricalconstraints.
Input: Image pair I
1
, I
2
.
θ := 0.3
◦
.. .the tolerance for establishing matches
σ := 4
◦
.. .the standard deviation of Gaussian kernel for soft voting
N
V
:= 50 ...the number of soft votes
N
S
:= 500 ...the maximum number of random samples.
η := 0.95 .. .the termination probability of the standard RANSAC (Hartley and Zisserman, 2004, p. 119).
Output: Essential matrix E
∗
.
1. Detect tentative matches and compute their descriptors.
1.1 Detect affine covariant feature regions MSER-INT+, MSER-INT-, MSER-SAT+,
MSER-SAT-, APTS-LAP, and APTS-HES in left and right images, Sec. 2.1.
1.2 Assign local affine frames (LAF) (Obdrˇz´alek and Matas, 2002) to the regions and transform the regions
into a standard position w.r.t. their LAFs.
1.3 ComputeDiscrete Cosine Descriptors (Obdrˇz´alek and Matas, 2003) for each region in the standardposition.
2. Construct the list M = [m]
N
1
of tentative matches with mutually closest descriptors. Order the list ascendingly
by the distance of the descriptors. N is the length of the list.
3. Find a camera motion consistent with a large number of tentative matches:
1: Set D to zero. // Initialize the accumulator of camera translation directions.
2: for i := 1,...,N
V
do
3: t := 0 // The counter of samples. n := 5 // Initial segment length.
N
T
:= N
S
// Initial termination length.
4: while t ≤ N
T
do
5: if t = ⌈200000
n
5
/
N
5
⌉ (Chum and Matas, 2005) then
6: n := n + 1 // The maximum number of samples for the current initial segment reached, increase
the initial segment length.
7: end if
8: t := t + 1 // New sample
9: Select the 5 tentative matches M
5
of the t
th
sample by taking 4 tentative matches from [m]
n−1
1
at
random and adding the 5
th
match m
n
.
10: E
t
:= the essential matrix by solving the 5-point minimal problem for M
5
(Nist´er, 2004; Stew´enius,
2005).
11: if M
5
can be reconstructed in front of cameras (Hartley and Zisserman, 2004, p. 260) then
12: S
t
:= the number of matches which are consistent with E
t
, i.e. the number of all matches m =
[u
1
,u
2
] for which max(∡(u
1
,E
t
u
2
),∡(u
2
,E
⊤
t
u
1
)) < θ.
13: else
14: S
t
:= 0
15: end if
16: N
R
:= log(η)/log
1−
S
t
5
/
N
5
//The termination length defined by the maximality con-
straint (Hartley and Zisserman, 2004, p. 119).
17: N
T
:= min(N
T
,N
R
) // Update the termination length.
18: end while
19:
ˆ
t = arg
t=1,...,N
S
maxS
t
// The index of the sample with the highest support.
20:
ˆ
E
i
:= E
ˆ
t
,
ˆ
e
i
:= camera motion direction for the essential matrix E
ˆ
t
.
21: Vote in accumulator D by the Gaussian with sigma σ and mean at
ˆ
e
i
.
22: end for
23:
ˆ
e := arg
x∈domain(D)
maxD(x) // Maximum in the accumulator.
24: i
∗
:= arg
i=1,...,50
min∡(
ˆ
e,
ˆ
e
i
) // The motion closest to the maximum.
25: E
∗
:=
ˆ
E
i
∗
// The “best” camera motion.
4. Return E
∗
.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
584
