
A SUBJECTIVE SURFACES BASED SEGMENTATION FOR THE
RECONSTRUCTION OF BIOLOGICAL CELL SHAPE
Matteo Campana, Cecilia Zanella, Barbara Rizzi
Electronics, Computer Science and Systems Department (DEIS), Bologna University, Bologna, Italy
Paul Bourgine
CREA-Ecole Polytechnique, Paris, France
Nadine Peyri´eras
CNRS-DEPSN, Gif sur Yvette, France
Alessandro Sarti
Electronics, Computer Science and Systems Department (DEIS), Bologna University, Bologna, Italy
Keywords:
Image Segmentation, Surface Geometry and Shape Extraction, Biological Image Analysis.
Abstract:
Confocal laser scanning microscopy provides nondestructive in vivo imaging to capture specific structures that
have been fluorescently labeled, such as cell nuclei and membranes, throughout early Zebrafish embryogene-
sis. With this strategy we aim at reconstruct in time and space the biological structures of the embryo during
the organogenesis. In this paper we propose a method to extract bounding surfaces at the cellular-organization
level from microscopy images. The shape reconstruction of membranes and nuclei is obtained first with an
automatic identification of the cell center and then a subjective surfaces based segmentation is used to extract
the bounding surfaces.
1 INTRODUCTION
In vivo imaging of embryo opens the way to a bet-
ter understanding of complex biological processes at
the cellular level. The challenge is to reconstruct at
hight resolution the structure and the dynamics of
cells throughout the organogenesis and understand-
ing the processes that regulate their behavior. With
this studies we expect to be able to measure relevant
parameters, such as proliferation rate, highly relevant
for investigating anti-cancer drug effects in vivo.
Achieving this goal requires the development of
an automated method for extracting the surfaces that
represent the cell shapes. We expect to avoid any
manual intervention, such as manual cell identifica-
tions, which would be a so hight time-consuming pro-
cess taking into account the huge amount of objects
contained in every image.
Sarti et al. (Sarti et al., 2000a), realized a similar
study in a previous work where confocal microscopy
images were processed to extract the shape of nuclei.
However, in that case, the analysed volumes were not
acquired from a living organism but from pieces of
fixed tissues. The next sections will introduce the
SubjectiveSurfaces based segmentation algorithm de-
signed to be applied to the living organism scenario.
In Section 2 we illustrate the strategies adopted
for image acquisition, filtering and automated cells
identification. In Section 3 we describe the segmen-
tation algorithm designed for nucleus and membrane
shape reconstruction. The Section 4 briefly explains
the technologies utilized for implementing and test-
ing the algorithm. In the last section we show some
results.
2 IMAGE ACQUISITION AND
PREPROCESSING
High resolution time-lapse microscopy imaging of
living organisms is best achievedby multiphoton laser
microscopy (MLSM) (Gratton et al., 2001). It allows
555
Campana M., Zanella C., Rizzi B., Bourgine P., Peyriéras N. and Sarti A. (2008).
A SUBJECTIVE SURFACES BASED SEGMENTATION FOR THE RECONSTRUCTION OF BIOLOGICAL CELL SHAPE.
In Proceedings of the Third International Conference on Computer Vision Theory and Applications, pages 555-558
DOI: 10.5220/0001086005550558
Copyright
c
SciTePress

imaging the Zebrafish embryo (Megason and Fraser,
2003), engineered with two distinct fluorescent pro-
teins to highlight all nuclei and membranes during
early embryonic stages.
Optical sections of the organism are obtained by
detecting the fluorescent radiation coming from the
laser excited focal plane. The 3-D spatial sampling
of the embryo is achieved by changing the focal
plane depth. Every image produced is defined on
a grid composed by 512 pixels in X and Y direc-
tion. The spatial resolution is 0.584793 µm in X,
Y and 1.04892 µm in Z. The acquisition of 3-D im-
ages has been repeated throughout the early embry-
onic development, from 3.5 hours post fertilization
for 4 hours(at 28
o
C) (Kimmel et al., 1995).
The automated or semi-automated reconstruction
of the cell contours can be achieved through a pro-
cedure consisting of three sequential tasks: filtering,
cells detection, and segmentation. The first denoising
task should obviously increase the signal-to-noise ra-
tio without corrupt the boundary of cells that should
be reconstructed. The geodesic curvature filtering
(Sarti et al., 2000a), (Rizzi et al., 2007) has been used
to achieve by this task.
A common feature that can be used to identify the
cells from images, is the spherical or better the el-
lipsoidal shape of the nuclei. The goal to recognize
the shape of cells has been achieved implementing an
algorithm (Melani et al., 2007) based on the general-
ized 3-D Houg Transform (Ballard, 1981) and able to
detecting the centers of the nuclei. The centers have
been used separately as the initial condition for the
segmentation of every nucleus and membrane.
3 IMAGE SEGMENTATION
We implemented a Subjective Surfaces technique that
extracts separately the membranes and nuclei bound-
aries. This method (Sarti et al., 2000b), (Sarti et al.,
2002) is particularly useful for the segmentation of in-
complete contours, because it allows the reconstruc-
tion and the integration of lacking information. The
analysed images, especially the membranes images,
are characterized by a signal which is almost unde-
tectable or even absent in some regions. In such situa-
tions, the Subjective Surfaces technique should allow
the completion of lacking-portions of objects.
3.1 Subjective Surfaces Technique
In order to explain the algorithm, let us consider the
3-D image to be processed I : (x,y,z) → I(x,y,z)
as a real positive function defined in some domain
M ⊂ R
3
. As a first step an initial hypersurface S
i
(S
i
: (x,y,z) → (x, y,z,Φ
0
)) is defined in the same do-
main M of the image I starting from an initial func-
tion Φ
0
. The algorithm is applied to every single ob-
ject contained in the images. For every cell, a differ-
ent function Φ
0
is defined starting from the center of
the object detected by the Hough Transform based al-
gorithm. There are some alternative forms for Φ
0
, for
example Φ
0
= −αD or Φ
0
= α/D , where D is the
3-D distance function from the reference point.
The Subjective Surfaces technique allows to de-
tect the object shape by evolving the initial function
Φ
0
througha flow that depend from the characteristics
of the surface S
i
and from the local characteristics of
the image. As defined in the well-know Geodesic Ac-
tive Contours technique (GAC) (Caselles et al., 1997)
the motion equation which drives the hypersurface
evolution is:
Φ
t
= gH|∇Φ| + ∇g· ∇Φ; H = ∇·
∇Φ
|∇Φ|
(1)
As in GAC the H is the mean curvature except for
a parameter ε introduced in H expression to weigh
the matching of level curves; The edge indicator g is a
representation of the structures contained in the image
and its gradient is a force field that points in the edges
direction.
The entire hypersurface is driven under a speed
law dependent on the image gradient, whereas in clas-
sical formulation of Level Set methods, as in GAC,
the evolution affects only a particular front or level.
The first term on the right side of (1) is a parabolic
motion that evolves the hypersurface in normal direc-
tion with a velocity weighted by the mean curvature
and by the edge indicator g, slowing down near the
edges (where g → 0). The second term on the right
is a pure passive advection along the velocity field
−∇g whose direction and strength depend on posi-
tion. This term attracts the hypersurface in the di-
rection of the image edges. In regions with subjective
contours, continuation of existing edge fragments, ε is
negligible and (1) can be approximated by a geodesic
flow, allowing the boundary completion with curves
of minimal length (i.e. straight lines).
A classical expression (Perona and Malik, 1990)
of the edge indicator g can be :
g(x,y,z) =
1
1+ (|∇G
σ
(x,y,z) ∗ I(x,y,z)|/β)
n
(2)
where G
σ
(x,y,z) is a Gaussian kernel with standard
deviation σ, (∗) denotes the convolution and n is 1 or
2. The value of g is close to 1 in flat areas (|∇I| →
0) and close to 0 where the image gradient is high
(edges). Thus, the minima of g denote the position of
edges and its gradient is a force field that can be used
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
556
to drive the evolution, because it always points in the
local edge direction.
The nuclei and membranes images behave in a
completely different way in terms of edge detection:
the thickness of membranes signal is about 3 or 4 vox-
els, whereas nuclei are solid objects. These specific
features require using different functions for the de-
tection of edges position in nuclei and membranes im-
ages. In nuclei images, the contours to be segmented
are located in the regions where image gradient is
higher and the minima of (2) denote the position of
the edges (Fig. 1(a)). On the contrary, the function
(2) can’t be applied on membranes images because it
revealsa double contour, on the internal and the exter-
nal side of the cell. An alternative edge indicator has
been defined using the image itself (not its gradient)
as contours detector. We can use the intensity infor-
mation to locate the position of the edges, because
the membranes images contain high intensity regions,
where the labeled membrane structure has been ac-
quired, versus low intensity background regions. The
edge indicator we used is:
g(x,y,z) =
1
1+ (|G
σ
(x,y,z) ∗ I(x,y,z)|/β)
2
(3)
As we expected, its minima locate the contours in the
middle of the membranes thickness (Fig. 1(b)).
4 IMPLEMENTATION AND
VISUAL INSPECTION
The segmentation algorithm has been implemented
and tested using a framework designed to visual-
ize and processing 3-D time lapse images (Campana
et al., 2007).
The segmented surfaces are extracted as the iso-
surfaces of the functions Φ obtained after the seg-
mentation. These surfaces are represented and stored
through a VTK PolyData format (Schroeder et al.,
1998). The segmented surfaces have been superim-
posed to the original non-processed image (raw data)
(a) Nuclei channel. (b) Membranes
channel.
Figure 1: Images of the edge indicators: membranes (a) and
nuclei (b).
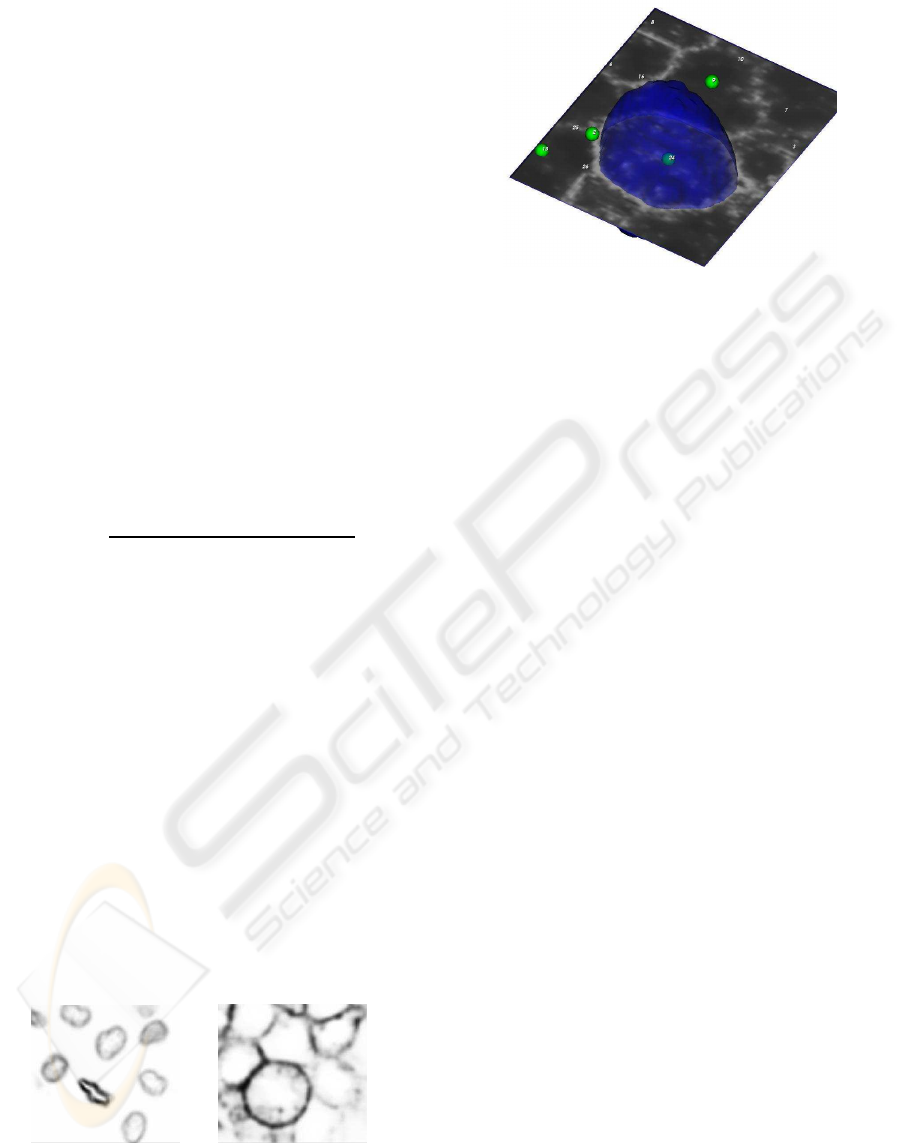
Figure 2: In figure the membrane image is analyzed by a
cutting plane, the center of cell number 24 is represented by
the green sphere, and its membrane boundary is displayed
as a blue surface.
and to detected nuclei in order to easily validate the
reconstruction process (Fig. 2). The position of every
nucleus detected inside each volume has been repre-
sented by a small green sphere labeled by the number
that identifies the cell.
The visual inspection realized on preliminary
membrane segmented surfaces demonstrated a not ex-
act extraction of the boundaries. This problem occurs
in membrane images because they are corrupted by a
weak nuclei signal, more intense during mitosis. In
order to solve this problem the membranes segmenta-
tion requires an additional preprocessing with the goal
to remove this interfering signal. First a separation of
the nuclei signal from the background is simply ob-
tained by a thresholding of nuclei images. The signal
obtained by this thresholding is then used to remove
the interfering signal from membranes images.
After segmentation, the intensity distribution of
the function Φ is typically associated to a bimodal
histogram with a values range between 0 and 255, be-
cause of linear rescaling. The highest intensity peak
(near to 255) corresponds to the segmented object, the
lowest one to the background. The segmented sur-
faces can be extracted as the isosurfaces correspond-
ing to the intermediate value 128.
5 RESULTS
As we expected the algorithm is able to complete the
missing boundaries. the Fig.3 shows the image and
the segmented surfaces of dividing membranes dur-
ing telophase. As is possible observe from the result-
ing surfaces, the portion of image with missing mem-
brane boundaries, underlined with a red circle, is well
completed and extracted.
A SUBJECTIVE SURFACES BASED SEGMENTATION FOR THE RECONSTRUCTION OF BIOLOGICAL CELL
SHAPE
557

(a) (b) (c)
Figure 3: Membrane segmentation of a dividing cell.
(a)Membranes signal. (b)Slice of the segmented surfaces.
(c)Segmented surfaces.
(a) (b) (c)
Figure 4: Segmentation of a cell throughout mitosis. Mem-
brane and nucleus shape are respectively represented with
green and red surfaces.
The visual inspection of different segmented sur-
faces reveals some problems in the reconstruction of
objects characterized by flat shapes such as epithe-
lial cells and nuclei of dividing cells. The Fig. 4
show the shape of nuclei and membranes when the
cell is close to the division. Before undergoing divi-
sion, cells become spherical, whereas nuclei staining
elongates as the chromosomes arrange in the future
cell division plane. It should be noted that the nucleus
size is slightly underestimated in the last two parts.
This is due to the parabolic regularization term in the
motion equation (1), which prevents the segmented
surface to reach the contour if it is concave and with
high curvature. Excluding these particular shapes the
nuclei and membranes surfaces seem to be pretty well
reconstructed if compared with the acquired images.
In Fig. 5 and Fig. 4 we show some surfaces obtained
with the algorithm.
We thank all the members of the Embryomics and
BioEmergences projects for our very fruitful interdis-
ciplinary interaction.
REFERENCES
Ballard, D. (1981). Generalizing the hough transform to
detect arbitrary shapes. Pattern Recognition, 13:111–
122.
Campana, M., Rizzi, B., Melani, C., Bourgine, P., Peyri-
ras, N., and Sarti, A. (2007). A framework for 4-d
biomedical image processing visualization and analy-
sis. In GRAPP 08-International Conference on Com-
puter Graphics Theory and Applications.
(a) Membranes. (b) Nuclei.
Figure 5: Segmentation of an entire subvolume.
Caselles, V., Kimmel, R., and Sapiro, G. (1997). Geodesic
active contours. International Journal of Computer
Vision, 22:61–79.
Gratton, E., Barry, N. P., Beretta, S., and Celli, A.
(2001). Multiphoton fluorescence microscopy. Meth-
ods, 25(1):103–110.
Kimmel, C. B., Ballard, W. W., Kimmel, S. R., Ullmann,
B., and Schilling, T. F. (1995). Stages of embryonic
development of the zebrafish. Dev. Dyn., 203:253–
310.
Megason, S. and Fraser, S. (2003). Digitizing life at the
level of the cell: high-performance laser-scanning mi-
croscopy and image analysis for in toto imaging of
development. Mech. Dev., 120:1407–1420.
Melani, C., Campana, M., Lombardot, B., Rizzi, B.,
Veronesi, F., Zanella, C., Bourgine, P., Mikula, K.,
Pe-yrieras, N., and Sarti, A. (2007). Cells tracking in
a live zebrafish embryo. In Proceedings 29th Annual
International Conference of the IEEE EMBS, pages
1631–1634.
Perona, P. and Malik, J. (1990). Scale-space and edge detec-
tion using anisotropic diffusion. IEEE Trans. Pattern
Anal. Mach. Intell., 12:629–639.
Rizzi, B., Campana, M., Zanella, C., Melani, C., Cunderlik,
R., Kriv, Z., Bourgine, P., Mikula, K., Pe-yrieras, N.,
and Sarti, A. (2007). 3d zebra fish embryo images
filtering by nonlinear partial differential equations. In
Proceedings 29th Annual International Conference of
the IEEE EMBS.
Sarti, A., de Solorzano, C. O., Lockett, S., and Malladi, R.
(2000a). A geometric model for 3-d confocal image
analysis. IEEE Transactions on Biomedical Engineer-
ing, 47(12):1600–1609.
Sarti, A., Malladi, R., and Sethian, J. A. (2000b). Subjective
surfaces: A method for completing missing bound-
aries. In Proceedings of the National Academy of Sci-
ences of the United States of America, pages 6258–
6263.
Sarti, A., Malladi, R., and Sethian, J. A. (2002). Subjec-
tive surfaces: A geometric model for boundary com-
pletion. International Journal of Computer Vision,
46(3):201–221.
Schroeder, W., Martin, K., and Lorensen, B. (1998). The Vi-
sualization Toolkit. Prentice Hall, Upper Saddle River
NJ, 2nd edition.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
558
