
RANDOM FOREST CLASSIFIERS FOR REAL-TIME OPTICAL
MARKERLESS TRACKING
Iñigo Barandiaran, Charlotte Cottez, Céline Paloc
VICOMTech, Mikeletegui Pasealekua 57, San Sebastian, Spain
Manuel Graña
University of Basque Country Computer Science School, Pº. Manuel de Lardizabal, 1 20009, San Sebastián, Spain
Keywords: Augmented Reality, Optical Tracking, Tracking by detection.
Abstract: Augmented reality (AR) is a very promising technology that can be applied in many areas such as
healthcare, broadcasting or manufacturing industries. One of the bottlenecks of such application is a robust
real-time optical markerless tracking strategy. In this paper we focus on the development of tracking by
detection for plane homography estimation. Feature or keypoint matching is a critical task in such approach.
We propose to apply machine learning techniques to solve this problem. We present an evaluation of an
optical tracking implementation based on Random Forest classifier. The implementation has been
successfully applied to indoor and outdoor augmented reality design review application.
1 INTRODUCTION
The main goal of the Augmented Reality (AR)
technology is to add computer-generated
information (2D/3D) to a real video sequence in
such a manner that the real and virtual objects
appear coexisting in the same world. In order to get
a good illusion, the registration problem must be
addressed. The real and virtual objects must be
properly aligned with respect to each other. In this
way, the position-orientation (pose) of the camera
respect to a reference frame must be accurately
estimated or updated over time. In this work, we
address the registration problem for interactive AR
applications, working on a fully mobile wearable
AR system based on a vision-based (optical) tracker.
Our approach to solve the registration problem
is based on the tracking of plane surfaces. Either in
an indoor or outdoor scenario, planes are common
structures. The ground, the building facades or walls
can be seen as planes. These 3D world planes and its
projection in the image are related by a homography.
Recovering this transformation it is possible to
estimate the position and orientation (pose) of the
camera.
Keypoint matching is the most important
feature of the markerless module. As described in
(Lepetit, 2006), we propose to treat wide line base-
line matching of features points as a classification
problem. We have implemented the Random Forest
classifiers and carried out an evaluation in the
context of optical markerless tracking for
Augmented Reality applications.
The article is structured as follows. Section 2
gives an overview of current optical tracking
techniques and methods in augmented reality
applications. Section 3 describes the approach to
keypoint matching based on Random Tree
classifiers. Section 4 presents a study of the
behaviour of the classifiers. In Section 5, a practical
augmented reality application using our
implementation is described. Section 6 summarizes
some conclusions and future work.
2 RELATED WORK
Though the real-time registration problem using
computer vision techniques has received a lot of
attention during last years is still far from being
solved. Ideally, an AR application should work
without the need to adapt neither the object nor the
environment to be tracked, by placing special
landmarks or references. This issue is known as
markerless tracking.
559
Barandiaran I., Cottez C., Paloc C. and Graña M. (2008).
RANDOM FOREST CLASSIFIERS FOR REAL-TIME OPTICAL MARKERLESS TRACKING.
In Proceedings of the Third International Conference on Computer Vision Theory and Applications, pages 559-564
DOI: 10.5220/0001086405590564
Copyright
c
SciTePress

We can divide the optical markerless tracking
technologies in two main groups: recursive
techniques or model-based techniques. Recursive
techniques start the tracking process from an initial
guess or a rough estimation, and then refine or
update it over time. They are called recursive
because they use the previous estimation to
propagate or calculate the next estimation. During
the estimation process several errors may occur,
such as wrong point matching or ill conditioned data
that can degenerate the estimation. Due to the
recursive nature of this kind of tracking, they are
highly prone to error accumulation. The error
accumulation over time may induce a tracking
failure, requiring a new tracking process
initialization, which can be cumbersome and not
feasible in practical applications.
Other approaches are known as tracking by
detection or model-based tracking. In this kind of
techniques some information of the environment or
the object to be tracked is known a priori. They are
also known as model-based tracking because the
identification in the images of some features (texture
patches or corners) corresponding to a known model
are used to recognize such object. This kind of
tracking does not suffer from error accumulation
(drift) because, in general, does not rely on the past.
Furthermore, they are able to recover from a
tracking fail since they are based on a frame by
frame detection not depending on the past. They can
handle problems such as matching errors or partial
occlusion, being able to recover from tracking
failure without intervention (Williams, 2007).
Tracking by detection needs information data
about the object or objects to be tracked prior to the
tracking process itself. This data can be in the form
of a list of 3D edges (CAD model) (Vaccheti, 2004),
colour features, texture patches or point descriptors
(Lowe, 2001). A good comparison about different
point descriptors can be found in (Mikolajczyk,
2005). The tracker is trained with that a priori data,
to recognize the object from different points of view.
A good survey about different model-based tracking
approaches can be found in (Lepetit, 2005).
Some authors propose to use machine learning
techniques to solve the problem of wide baseline
keypoint matching (Özuysal, 2006). Supervised
classification system requires a previous process, in
which the system “is trained” with a determined set
of known examples (training set) that present
variations in all their independent variables. Once
the process is finished, the system is trained and
ready to classify new examples. The most widely
used supervised classifiers are for example, k-
Nearest Neighbours, Support Vector Machine or
decision trees.
While k-Nearest Neighbors or Support Vector
Machine can achieve good classification results,
they are still too slow and therefore not suitable for
real-time operation (Lepetit, 2004). Recently the
approach based on decision trees has been
successfully applied on tracking by detection during
feature point matching task (Özuysal, 2006).
Based on this recent progress in the field, we
propose to integrate Random Forest classifiers in the
implementation of a tracking module and carry out
some evaluation studies.
3 CLASSIFIER DESCRIPTION
In this section we describe a Random Forest
classifier implementation as a core of a tracking
module.
3.1 Random Trees
As in (Lepetit, 2006), we propose a supervised
classification method based on Random Forest for
interest point matching. The classifier is able to
detect key-point occurrences even in the presence of
image noise, variations in scale, orientation and
illumination changes. This classifier is a specific
variation of a decision tree (Breiman. 2001).
When the tree is constructed and trained it can
correctly classify a given data (example) by pushing
it down the tree. In order to do it, while the data is
descending down on the tree, in every node there is a
discriminant criteria which allows to know to which
child the example has to go.
A random tree is called random because instead
of do exhaustive search for the best combination of
features to be tested in each node to determine the
discriminant criteria, just some random
combinations of them are evaluated. When the
number of different classes to be recognized and the
size of the descriptor of such classes are high, an
exhaustive analysis is not feasible. In addition, the
examples that are going to be used during the
training process are selected at random from the
available ones. The combination of some random
trees forms a multi-classifier known as Random
Forest. One of the advantages of the Random Forest
is their combinational behaviour. Even when a
random tree can be weak by itself, their recognition
rate is low; the combination of such weak classifiers
can generate a strong one.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
560
3.2 Training
In supervised classification each class must be
defined before the training process itself. In order to
define the classes, we use a point extractor (Rosten,
2006) to get the candidate points and their
surrounding patches. Then the classifier assigns a
class number to each point, and their class descriptor
is defined. The descriptor of each class is
constructed as the intensity values of the pixels that
forms the extracted patch centered at interest point p.
Once the classes to be recognized by the classifier
are defined, the training set must be generated.
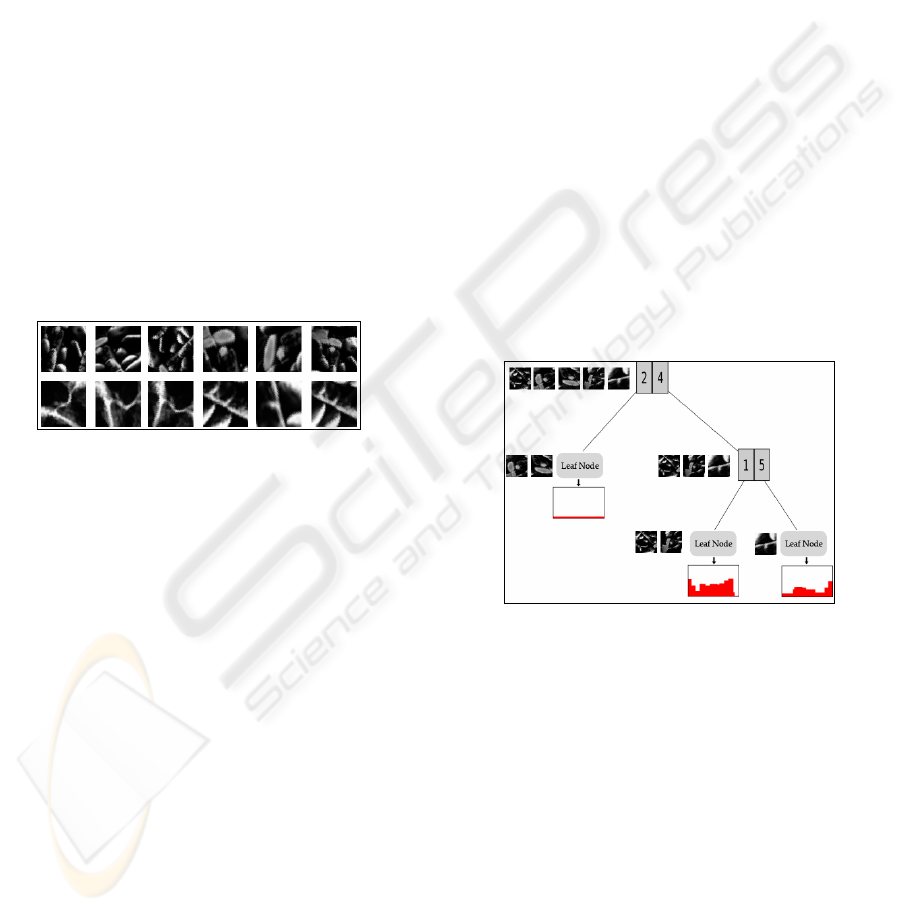
As described in (Lepetit, 2006) we can exploit
the assumption that the patches belong to a planar
surface; we can then synthesize different new views
of the patches using warping techniques as affine
deformations (Fig. 1). These affine transformations
are needed to allow the classifier to identify or
recognize the same class but seen from different
points of view and at different scales. This step is
particularly important for tracking, where the camera
will be freely moving around the object with six
degrees of freedom.
Figure 1: Randomly generated training examples of four
classes by applying affine transformations.
Once the training set is ready, the training task
can be performed. During this task, a number of
examples are randomly selected from the training
set. These examples are pushed down in the trees. In
order to decrease the correlation between trees, and
therefore increase the strength of the classifier,
different examples must be pushed down in each
tree. This randomness injection favours the
minimization of trees correlation.
The training step is needed in order to define
how each tree of the forest is going to test the
patches it receives, i.e, which pixels of the patch it
tests.
While building up the tree, each node of the
tree is treated as follows:
N training examples from the training set are in
the node.
S random sets of n pixels are selected.
For each set, its information gain(Breiman,
2001) is calculated.
The variable set with the greatest information
gain value is selected.
The examples are tested with the selected set of
pixels. Depending on the result of this test,
they are pushed down to their corresponding
child node.
The above process is recursively done for the
children nodes, whether until there is only one
example, or only one class is represented in
the remaining examples or the maximal
predefined depth is reached (Fig. 2).
The tests to be performed in each node are simple
comparison of the intensity values of the pixels
indicated by the pixels set. In case of a pixel set of
size two, the tests to be performed in each node
could be:
(
)
⎩
⎨
⎧
≥−
=
otherwiseldgoRightChi
tpvpvifdgoLeftChil
T
)()(
21
Where
)(
1
pv
and
)(
2
pv
represent the intensity values
of two pixels located at positions
1
p and
2
p
respectively. The values of the positions
1
p ,
2
p ,
were randomly selected during the training step. The
value of t represents a threshold that can be also
randomly selected while training.
Figure 2: Random Tree construction example.
Once the descriptors reach the bottom (maximal
depth) of the tree, it is said that they reached a leaf
node and the recursion stops. In leaf nodes the class
posterior distributions are stored. These distributions
represent the number of class examples from the
training set that has reached that node. Once an
example of a given class reaches a leaf node, the
posterior probability distribution stored in that node
must be updated accordingly.
3.3 Classification
Once the classifier is built, i.e, the pixels to be tested
in each node and the class posterior distributions are
calculated, it is ready to classify new examples
different from the ones in the training set. During the
RANDOM FOREST CLASSIFIERS FOR REAL-TIME OPTICAL MARKERLESS TRACKING
561

classification task any new example is dropped
down in every tree that constitutes the forest. These
examples will reach a leaf node depending on the
results of the tests obtained in the previous nodes
they visit (Fig. 3). The posterior distributions stored
in leaf nodes are used to assign a class probability
value to the examples that reach that
node,
()
η
=== nTTcYP
l
,|
1
where
l
T is a
given tree of the forest and
η
is the reached node by
the example (patch) Y and
c
is the assigned class
label.
Figure 3: Example of image path classification.
As any multi-classifier, the random forest needs
to combine the independently generated output by
each tree in the forest, in order to assign a final class
label to the examples to be classified.
3.4 Tracking
As in (Lepetit, 2006) the Random Forest classifier
can be applied to interest point matching of a planar
surface prior to homography estimation (Hartley,
2004). After the classification step, wrong classified
patches (outliers) can be removed by using robust
estimation techniques such as RANSAC in order to
obtain a more accurate homography estimation.
Furthermore, the final estimation can be refined by
using Levenberg-Marquardt non-linear minimization
method starting from the estimation obtained by
RANSAC.
4 EVALUATION
We have implemented our own API to evaluate the
influence of different factors on the behaviour of
random forest classifiers during the training period
as well as during the execution period. Depending
on different factors such as, number of classes,
number of trees in the forest, or the size of the
training set, the point classification rate may vary. In
addition, other factors such as the training time and
the execution time are also very important factors to
be evaluated.
4.1 Combination Methods
During the run time point classification (point
matching) a probability and therefore a class label
must be assigned to every point (texture patch) that
needs to be matched against the model (trained
points). In this way, once the point extractor
generates the potential matches, they all must be
dropped down in the trees. Each tree will
independently give a probability value to a given
patch, and then all these values must be combined to
assign the most probable match. We have
implemented and evaluated the following
combination methods:
Our first study consisted in comparing the
classification rate of the respective methods. The
tests were done with the same number of trees and
with the same value of depth. Due to the random
behaviour of the random forest classifier, the tests
were run 10 times. All the tests were carried out with
100 different classes, 15 different trees, and 10 as
the maximum reachable depth. The results are
shown on the next figure.
Combination Methods
55
60
65
70
75
80
85
12345678910
Number of Test
%Good classification Rate
Maximal number of
Occurrences
Maximal Probability
Maximun of the Average of
probability
Maximun of the Product of
Probabilities
Ranking Method
Figure 4: Comparison between Combination Methods
performance.
As seen in Figure 4, the Maximum of the
average probability method reaches the best results,
being the most stable method amon
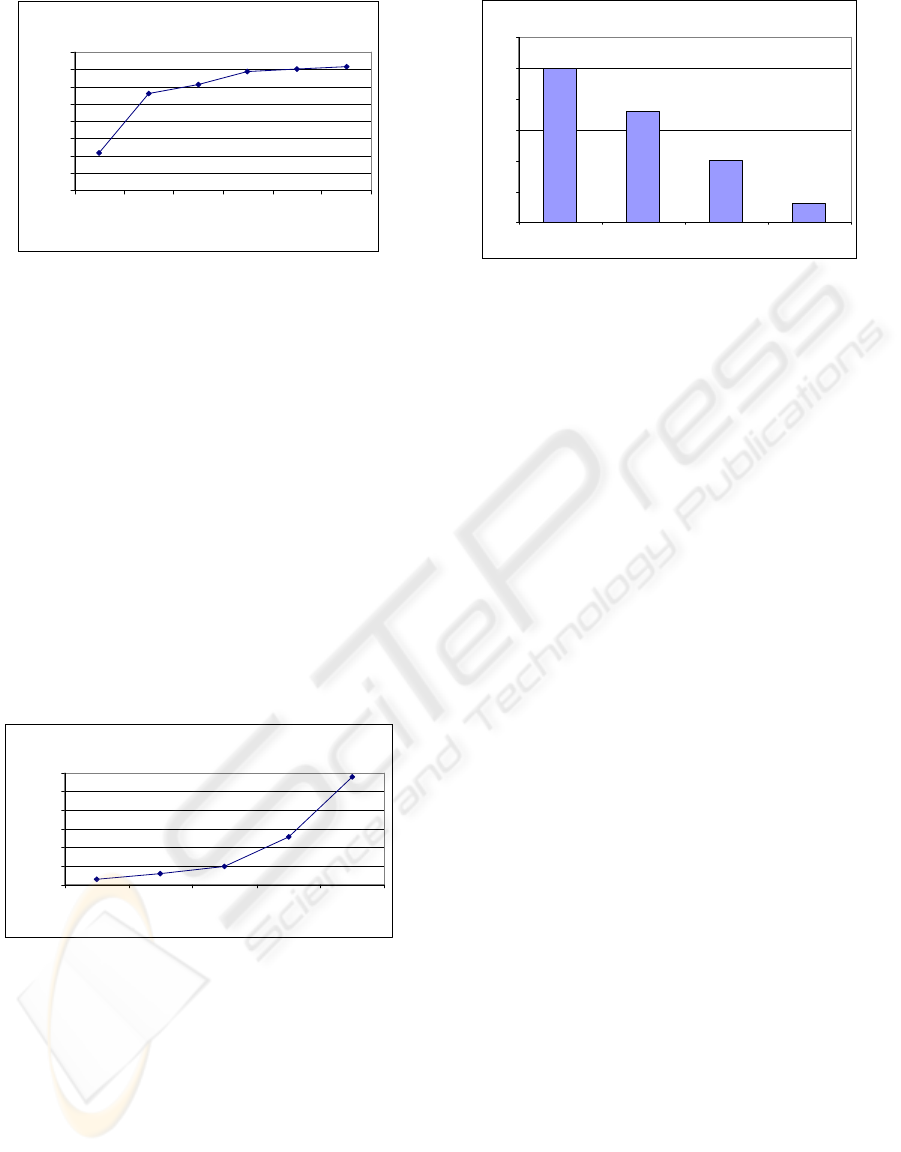
4.2 Classification Rate
We also evaluated the influence of the number of
trees on the classification rate. The results are shown
on the next figure. It is seen that reaching a certain
number of trees for a same training set, the increase
in performance is not significant (Fig. 5).
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
562
Recognition Rate
0
10
20
30
40
50
60
70
80
5 1015202530
Number of trees
% Good Classification Rate
Figure 5: Classification rate in function of the number of
trees.
4.3 Training Time
The training time was then evaluated. This factor
mainly depends on the size of the training set, this is,
on the number of examples that are going to be
dropped down in the trees to estimate the final
posterior probability distributions of each class. The
size of the training set has also impact on the
recognition rate, but no significant improvement of
classification rate are seen from about 500 training
examples, given the same forest, i.e, the same
number of trees with the same value of depth each
tree, while the training time notably increases. As in
the previous one, this test shows that the classifier
has an optimal maximum that once reached
(converged) the performance gain is very slow (Fig.
6).
Training Time
0
200
400
600
800
1000
1200
40 80 150 300 500
Number training examples
training time (s)
Figure 6: Training time in function of the size of the
training set.
4.4 Computational Cost
In order to evaluate the computational cost of the
method, we conducted some tests using different
hardware with the same memory amount but
different CPUs. Because of the highly CPU
demanding tasks during the tracking, the results
show clearly that the performance drastically
decreases with a poor hardware (Fig. 7).
CPU Type
0
5
10
15
20
25
30
Intel Core 2 DUO
1600Mhz
AMD 2100+ Mhz Intel Pentium 4
1300Mhz
Intel Centrino 1000
Mhz
Frames Per Second
Figure 7: Computational cost and CPU.
4.5 Discussion
The random tree classifier performs well when the
number of different points (classes) is moderate,
around 100 different points. When this number
increases, the classification rate starts to decrease.
This is because the strength of the trees decreases
individually due to the excessive number of different
classes, so that the classification ability or the forest
also decreases.
When the classification rate is low, the number
of miss-matched points (outliers) increases. Once
the population of outliers is high, the number of
iterations of either RANSAC or non-linear
estimation methods before convergence is very high.
5 APPLICATION
The approach described previously was applied
within an innovative system using head mounted
displays (HMD) for collaborative mobile mixed
reality design indoor and outdoor review.
Our tracking module uses natural features to
estimate the position and orientation of the camera,
mounted on the HMD. Once this transformation is
computed, the virtual object can be registered and
viewed through the HMD as part of the real world.
During the tracking process, the transformation must
be updated over time.
By using natural features, the use of artefacts
such as reflective markers is avoided, allowing the
system to be more flexible and being able to work in
non-well controlled conditions, such as outdoor
environments.
As described earlier, tracking by detection
techniques requires an off-line process where the
classifier is trained. During this period, one image of
a highly textured plane, such as a building facade or
a picture over a table, must be acquired. After the
acquisition, some features points and their
RANDOM FOREST CLASSIFIERS FOR REAL-TIME OPTICAL MARKERLESS TRACKING
563

surrounding texture patches are extracted from the
image (Rosten, 2006), and synthetic views of the
plane are generated.
Based on the results described previously, the
classifier is trained to be able to recognize about
100-130 different classes (points). The forest is
constructed with 15-20 trees, and a training set
compound of 500 synthetically generated examples,
in less than 30 minutes. This size of the training set
is a good compromise between training time and
final accuracy of the classifier. Training time is a
very important factor in practical situations such as
outdoor setup preparation time. Once the training set
is ready, the system is ready for tracking.
The obtained frame rate is about 20-25 frames
per second (near real-time) on a 1.6Ghz dual core
CPU. This frame rate may vary depending on the
accuracy of the tracker, i.e, depending on the
number of different points to be recognized. The
drift and jitter are well controlled, so no severe
movements of the objects occur. On a lower CPU,
such as the one installed on a JVC portable device,
the obtained frame rate is 5 frames per second, for
the same number of points.
In comparison with a recursive tracking
approach, the tracking by detection allows the
tracking to run faster and being more robust against
partial object occlusion, or fast camera movement.
The tracker can run indefinitely without requiring a
new initialisation.
6 CONCLUSION AND FUTURE
WORK
In this work we have presented an approach of
tracking by detection for plane homography
estimation using the Random Forest based classifier
for interest point matching. An evaluation and a
practical application of the approach in an
augmented reality setup has been described. The
proposed method is able to robustly track a plane
even if partial plane occlusion occurs, at real-time
frame rate.
We think that machine learning techniques such
as Random Forest is a very promising technique for
optical marker-less tracking.
We want to extend our work to support on-line
training classification (Özuysal, 2006). On-line
training allows the tracking to update the model with
new feature points not present in the original
training set. As described in (Williams, 2007) on-
line training can be exploited in several frameworks
such as Simultaneous Localization and Mapping
(SLAM).
Also the use of the new generation Graphic
Processor Units (GPU) to perform some task, such
as the generation of warping transformations during
training step is planned.
ACKNOWLEDGEMENTS
This work has been partially funded under the 6th
Framework Programme of the European Union
within the IST project “IMPROVE” (IST FP6-
004785, http://www.improve-eu.info/).
REFERENCES
Breiman, L., 2001. Random Forests. Machine Learning
Journal, Vol. 45, pages 5-32. ISSN 0885-6125
Hartley, R., Zisserman, A. 2004. Multiple View Geometry
in Computer Vision, Cambridge University Press, 2
nd
edition. ISBN: 0521-54051-8.
Lepetit, V., Fua, P. 2006. Keypoint Recognition Using
Randomized Trees. IEEE Transactions on Pattern
Analysis and Machine Intelligence, Vol. 28(9), pages
1465-1479. ISSN: 0162-8828.
Lepetit, V., Fua, P. 2005. Monocular model-based 3D
object tracking of rigid objects: A survey. Foundations
and Trends® in Computer Graphics and Vision., Vol.
1, pages 1–89.
Lepetit, V., Pilet, J., Fua, P. 2004. Point Matching as a
Classification Problem for Fast and Robust Object
Pose Estimation. In Conference on Computer Vision
and Pattern Recognition. ISBN: 0-7695-2158-4.
Lowe, D. 2004. Distinctive Image Features from Scale
Invariants Keypoints. International Journal of
Computer Vision. Vol. 20(2), Pages 91-110.
Mikolajczyk, K., Tuytelaars, T., Schmid, C., Zisserman,
A., Matas, J., Schaffalitzky, F., Kadir, T., and Gool, L.
V. 2005. A Comparison of Affine Region Detectors.
Int. Journal of Computer Vision. Vol. 65(1-2), pages
43-72. ISSN:0920-5691.
Özuysal, M., Fua, P., Lepetit, V. 2006. Feature Harvesting
for Tracking-By-Detection. In Proc. European
Conference on Computer Vision, pages 592-605.
ISBN:3-540-33836-5.
Rosten, E., Drummond, T. 2006. Machine Learning for
High-Speed Corner Detection. In Proc. European
Conference on Computer Vision. Pages 430- 443.
ISBN 3540338322.
Vacchetti, L., Lepetit, V., Fua, P. 2004. Combining Edge
and Texture Information for Real-Time Accurate 3D
Camera Tracking. In Proc. IEEE and AM International
Symposium on Mixed and Augmented Reality. Vol. 4,
pages 48-57. ISBN:0-7695-2191-6.
Williams, B., Klein, G., Reid, I. 2007. Real-time SLAM
Relocalisation. In Proc. IEEE Interrnational
Conference on Computer Vision.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
564
