
ESTIMATING VEHICLE VELOCITY USING RECTIFIED IMAGES
Cristina Maduro, Katherine Batista, Paulo Peixoto and Jorge Batista
∗
ISR-Institute of Systems and Robotics, Department of Electrical Engineering, FCTUC
University of Coimbra, Coimbra, Portugal
Keywords:
Image rectification, vehicle velocity, video sequences.
Abstract:
In this paper we propose a technique to estimate vehicles velocity, using rectified images that represent a top
view of the highway. To rectify image sequences captured by uncalibrated cameras, this method automatically
estimates two vanishing points using lines from the image plane. This approach requires two known lengths
on the ground plane and can be applied to highways that are fairly straight near the surveillance camera. Once
the background image is rectified it is possible to locate the stripes and boundaries of the highway lanes. This
process may also be used to count vehicles, estimate their velocities and the mean velocity associated to each
of the previously identified highway lanes.
1 INTRODUCTION
The incessant advances in camera technology along
with the constant improvement in areas such as com-
puter vision have lead to the development of auto-
matic and robust methods to estimate vehicle velocity.
However, this task is problematic when the image se-
quences do not preserve length ratios and parallelism
between lines. This difficulty can be easily solved by
the creation and employment of virtual images which
preserve the referred characteristics, acknowledged as
rectified images. These rectified images by repre-
senting a ”top view” of the observed scenario, sim-
plify the task of estimating velocity in traffic surveil-
lance systems. This process demands the estimation
of two vanishing points using lines from the image
plane. Nevertheless, it is important to state that this
procedure is constrained to the precision with which
the required vanishing points are estimated. Thus, a
robust RANSAC (Fischler and Bolles, 1981) based
algorithm is applied in the estimation of the neces-
sary vanishing points. These are necessary to calcu-
late the homogeneous representation of the vanishing
line. This vanishing line is used in the calculation
of the projective transformation that rectifies the im-
age sequence. Once attained the required projective
transformation it is then possible to rectify video se-
quences, and therefore estimate vehicle velocity and
extract lane topology. The highway lane boundaries
∗
This work was supported by BRISA, Auto-estradas de
Portugal, S.A.
can be easily located once identified the position of
the striped lines on the rectified background image.
Seeing as the striped lines follow a periodic distribu-
tion, these can be located by applying the autocor-
relation function to each line of the rectified back-
ground image. In order to estimate vehicle veloc-
ity, a Kalman filter (Kalman and Bucy, 1960) based
tracking system is employed to infer future vehicle
positions given a sequence of images. The estimation
of an object’s displacement or motion using informa-
tion extracted from two consecutive images can be
obtained using Lucas-Kanade’s optical flow method
(Lucas and Kanade, 1981). Nonetheless, we chose to
employ a Kalman filter to correct the estimation pro-
vided by the previously referred method. Given the
fact that the output of this procedure is represented
in pixels per frame it is necessary to estimate a scale
factor that relates distances on the ground plane with
distances on the image plane. Once obtained the re-
quired scale factor and known the video’s framerate,
this procedure presents the object’s velocity in the de-
sired units. This paper is organized in four main sec-
tions. The first, named Image Rectification, focuses
on the method that originates the required rectified
images. The second section is referent to the pro-
cedure applied to estimate the necessary scale factor,
while the third section presents the process that esti-
mates vehicle velocity. To conclude, several results,
such as, rectified images and data referent to velocity
estimation are presented.
551
Maduro C., Batista K., Peixoto P. and Batista J. (2008).
ESTIMATING VEHICLE VELOCITY USING RECTIFIED IMAGES.
In Proceedings of the Third International Conference on Computer Vision Theory and Applications, pages 551-558
DOI: 10.5220/0001088205510558
Copyright
c
SciTePress

2 IMAGE RECTIFICATION
The perspective transformation associated to image
formation, distorts certain geometric properties, such
as length, angle and area ratios. Due to this fact, the
employment of video or image sequences in traffic
surveillance is challenging, in particular for the task
of vehicle velocity estimation. However, this prob-
lem can be solved by using rectified images that re-
store the lost geometric properties to the images of
the monotorized scenario. A rectified image can be
attained by estimating a homographic transformation.
This estimation could be acquired by using the intrin-
sic and extrinsic camera parameters. Unfortunately,
the surveillance cameras are uncalibrated and there-
fore, these parameters are unknown. Consequently,
several methods have been developedin order to auto-
matically restore geometric propertiesto objects mov-
ing on a ground plane. Namely, D. Dailey (Dailey and
Cathey, 2005) presents a method that estimates the lo-
cation of one vanishing point in order to calibrate the
surveillance camera and achieve the required images.
However, this method presupposes the knowledge of
one of the angles of orientation of the surveillance
camera, and therefore cannot be applied to all surveil-
lance systems. On the other hand, in (Schoepflin
and Dailey, 2003), associated with T. Schoepflin, D.
Dailey presents a method that requires the estimation
of two vanishing points from lines that are parallel
and orthogonal to the road. This method estimates
the camera orientation and focal length, though the
height at which it is located is not automatically es-
timated. L. Grammatikopoulos, G. E. Karras and E.
Petsa in (Lazaros Grammatikopoulos, 2002), present
a method to measure vehicle speed using rectified im-
ages. This approach determines one vanishing point
and requires the knowledge of one known length one
the ground plane. Nevertheless, this method does not
rectify images from cameras that aren’t aligned ac-
cordingly to an axis parallel to the direction of mo-
tion. On the other hand, B. Bose and E. Grimson in
(Bose and Grimson, 2003), present a method similar
to the method employed in this study. The method
proposed by Bose and Grimson achieves metric rec-
tification of the ground plane by tracking two objects
that travel with constant and possibly unequal speed.
In this paper, a method presented by D. Liebowitz
and A. Zisserman (Liebowitz and Zisserman, 1998) is
successfully employed in the rectification of images.
This technique requires the estimation of two van-
ishing points and the prior knowledge of two angles
on the ground plane. Given the nature of a roadway
structure, i.e. the large amount of parallel and perpen-
dicular lines, these parameters can be easily obtained.
In a general manner, this method estimates the pro-
jective transformation by establishing three matrices
or transformations.
H = H
s
.H
a
.H
p
(1)
where H
s
represents the similarity transformation,
H
a
the affine and H
p
the pure projective transforma-
tion. Each one of these transformations is responsible
for the reinstatement of certain geometric and met-
ric properties and can be achieved using known pa-
rameters on the image and ground planes. Namely,
the pure projective transformation is responsible for
restoring line parallelism and area ratios to the sce-
nario. This transformation can be easily acquired
by estimating the homogeneous representation of the
vanishing line. Once known the location of two van-
ishing points, this representation is quite straightfor-
ward, as can be seen in the following equation:
l =
l
1
l
2
l
3
= v
1
x v
2
(2)
where l is the homogeneous representation of the
vanishing line and v
1
and v
2
the vanishing points that
are represented on the upper left box in Figure 1.
Figure 1: Stages of the rectification process.
Therefore, the pure projective transformation can
be represented by the following matrix:
H
p
=
1 0 0
0 1 0
l
1
l
2
l
3
(3)
where H
p
represents the referred pure projective
transformation. Hence, a correct estimation of this
transformation relies on the accurateness of the loca-
tion of the vanishing points. These are obtained by
applying the Hough transform to edges extracted from
the imaged highway lanes and to edges identified on
the foreground image.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
552
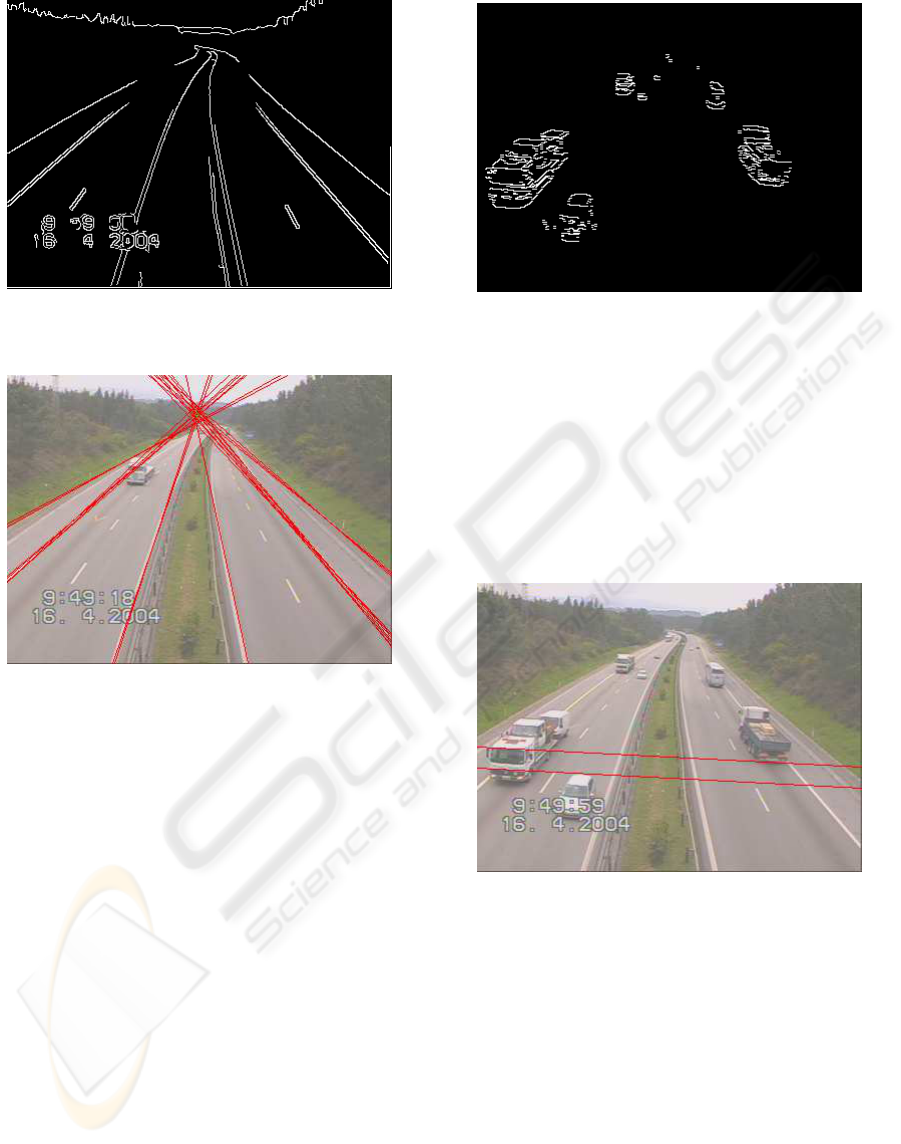
Figure 2: Edges detected by applying the Canny Edge De-
tector to the Background image.
Figure 3: Lines identified using the edges represented in
Figure 2.
Figure 2 represents an example of the edges de-
tected from a background image, while Figure 3 il-
lustrates the lines extracted from the previous image.
However, edges detected from the background image
may contain unnecessary edges. Due to this fact, an
activity map is estimated. An activity map is an im-
age that represents the regions that contain movement
throughout the image sequence, i.e. the regions of in-
terest. By applying an AND operator to the image
shown on Figure 2 and to the activity map, results an
image that contains only the sought edges. By def-
inition a vanishing point is the intersection point of
lines on the image plane that represent parallel lines
on the ground plane. Nevertheless, given the fact that
these lines do not intersect on an exact point, the van-
ishing point is situated on the point whose distance is
minimal to each one of these lines. Therefore, one of
the required vanishing points is obtained applying the
least squares method.
To determine the second vanishing point it is nec-
essary to identify edges that are predominately hori-
zontal on the foreground image. This image can be
Figure 4: Edges detected by applying the Canny Edge De-
tector to the Background image.
attained by subtracting each frame to the background
image and shows segmented vehicles. Figure 4 illus-
trates edges detected from the foreground, i.e. seg-
mented vehicles, using Sobel Detector that identifies
horizontal edges. The lines represented in Figure 5
where obtained from the edges represented in Figure4
and are only a few of the used in the calculation of the
second vanishing point.
Figure 5: Lines identified using the edges represented in
Figure 4.
Given the fact that a great amount of lines ob-
tained from the foreground image are outliers, the es-
timation of this vanishing point using the least squares
method is erroneous. Thus, a RANSAC based algo-
rithm is used in this estimation. However, it is impor-
tant to state that the employed RANSAC algorithm
must contemplate the fact that the vanishing point
might be situated at infinity. In order to do so, it is
necessary to adopt a 3D homogeneous representation
for the extracted lines. This form of representation
takes into account points at infinity. Each iteration
of the RANSAC algorithm estimates a possible van-
ishing point using equation (4). The vanishing point
with the largest number of inliers is taken as the cor-
ESTIMATING VEHICLE VELOCITY USING RECTIFIED IMAGES
553

rect vanishing point.
p = l
1
x l
2
, (4)
where l
1
and l
2
represent the homogeneous coordi-
nates of two lines. The accuracy of this estimation is
crucial, and seeing as this algorithm is highly robust,
though computationally heavy, it presents fine results
in the estimation of the required vanishing point.
On the other hand, the affine transformation rein-
states angle and length ratios of non parallel lines,
and can be obtained using two known angles on the
ground plane as explained in (Liebowitz and Zisser-
man, 1998). This approach estimates two parame-
ters α and β using constraints on the ground plane.
These parameters represent the coordinates of the cir-
cular points on the affine plane. Liebowitz and Zis-
serman in (Liebowitz and Zisserman, 1998) propose
three types of constraints:
• A known angle on the ground plane;
• equality of two unknown angles;
• a known length ratio.
Given the orthogonal structure of the highway lanes,
we chose to employ the first constraint in this algo-
rithm, i.e. a known angle on the ground plane. Each
known angle on the ground planes defines a constraint
circle. This fact is quite useful seeing as α and β lie
within this circle represented on a complex space de-
fined by (α,β). Therefore, in order to obtain the re-
quired parameters one may estimate the intersection
of two constraint circles obtained using two different
known angles. Figure 6 illustrates two possible angles
that can be used to calculate the required parameters
(α and β).
H
a
=
1
β
−α
β
0
0 1 0
0 0 1
(5)
Figure 6: Representation of two possible angles obtained
from two known lengths on the ground plane.
To conclude, the last transformation known as
similarity transformation performs rotation, transla-
tion and isotropic scaling of the resultant image.
H
s
=
s.cosθ −s.sinθ t
x
s.sinθ s.cosθ t
y
0 0 1
(6)
Therefore, a rectified image can be created by ap-
plying the following transformation, along with bilin-
ear interpolation, to each pixel of the image acquired
by the surveillance camera:
H = H
s
.H
a
.H
p
(7)
3 SCALE FACTOR AND LANE
PARAMETERS
Once the image sequence is rectified it is possible to
measure the distance, in kilometres, travelled by the
vehicle in two consecutive frames. In order to do so,
one must calculate a scale factor that relates pixels
in the image with the corresponding distance on the
ground plane. This scale factor can be obtained by es-
timating the ratio between the imaged highway stripe
period and the genuine stripe period on the ground
plane. Hence, in order to clearly identify the striped
lines on a rectified image plane, the previously at-
tained background image is rectified. Observing the
stripes presented on a rectified background image,
which can be seen on Figure 7, it is possible to con-
clude that these follow a periodic distribution. Us-
ing a auto correlation function, represented by expres-
sion (8), the lane stripe’s period can be located, since
the function has peaks in the beginning and ending of
each stripe, see Figure 8.
R(k) =
E [(X
i
− µ).(X
i+k
− µ)]
σ
2
, (8)
where E is the expected value operator, X
i
is a
pixel of the straightened background image while
X
i+k
is a pixel on the same line of the referred image,
but distanced k pixels from the first. µ represents the
average of the pixels of each line of the straightened
image, σ is the corresponding variance and k the al-
ready referred distance gap that, in this precise case,
is a number of columns of the rectified background
image.
Figure 7: Example of a straightened background image.
Therefore, the autocorrelation function is applied
to each line of the straightened background image, al-
lowing the identification of the whereabouts and pe-
riods of the image stripes. Once located the image
highway stripes, it is possible to situate the highway
boundaries on the image plane. This information is
quite useful seeing as it may be used in estimating
each lane’s mean vehicle velocity.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
554

Figure 8: Autocorrelation functions of two stripe lines
present on the rectified background image The green arrows
represent the stripe period.
4 VEHICLE VELOCITY
To identify the location of vehicles on each frame, one
must first distinguish objects from the background.
This procedure is known as image segmentation and
can be accomplished by subtracting each frame from
the background image. Figure 9 shows the result of
this operation.
Figure 9: Example of a segmented image.
However, as can be seen in Figure 9, this process
generates non-contiguous objects. This phenomenon
results from the lack of information in regions dis-
tant from the camera due to the perspective distortion
intrinsic in image formation. This fact is also respon-
sible for the visible deformation of vehicle shape on
rectified images. Seeing as non-contiguous objects
constitute a problem to vehicle detection, certain mor-
phological operations, such as dilation and erosion,
are applied to the resulting images. Figure 10 illus-
trates an example of a segmented image that may be
used in the identification of vehicles.
Figure 10: Example of two continuous blobs.
The velocity associated with each detected ve-
hicle is easily attained by employing a Kalman fil-
ter (Kalman and Bucy, 1960) based tracking sys-
tem. This process predicts future positions given a
sequence of images, and matches these with the in-
formation provided by blobs extracted from the seg-
mented image in order to correct the system’s model.
In order to do so, this process reiterates three steps
for each new frame. The first step is responsible for
extracting the location of each identified vehicle us-
ing the contiguous object in the segmented image, ac-
knowledged as blob. Given two consecutive frames it
is possible to estimate motion, i.e. optical flow, using
Lucas-Kanade’s method (Lucas and Kanade, 1981).
This technique presupposes that a pixel’s intensity is
invariant in two successive frames and therefore, it
is possible to determine motion by locating the cor-
responding pixel on the subsequent frame. Never-
theless, this method might be flawed when applied
to traffic image sequences. Consequently, we chose
to employ a Kalman filter to estimate each vehicle’s
position and correct the estimated velocity given by
Lucas-Kanade’s method. Given the fact that the im-
aged vehicles are travelling on a rectified image, their
velocity can be considered linear and therefore, the
following equations may be used to characterize a ve-
hicle’s movement:
x
i+1
= x
i
+ v
x
.t
y
i+1
= y
i
+ v
y
.t (9)
where v
x
and v
y
represent the different velocity com-
ponents while x and y the vehicle’s position coordi-
nates. These expressions can be employed in the im-
plementation of the Kalman filter that estimates each
vehicle’s position and corrects the estimated velocity.
More precisely, each estimated state is obtained by
applying the following equation:
ˆx(k) = φ(k − 1).x(k− 1) =
x,v
x
,y,v
y
T
, (10)
where φ is the transition matrix and can be initially
defined by the following matrix:
φ(0) =
1 1 0 0
0 1 0 0
0 0 1 1
0 0 0 1
(11)
This leads to the second step of the tracking sys-
tem. In order to employ a Kalman filter in this pro-
cess, one must relate a given estimation with the iden-
tified position using the segmented image. This pro-
cess is rather tricky due to the occasional overlapping
of blobs in the segmented image or absence of detec-
tion. Thus, a failsafe sub process was implemented in
order to deal with these cases.
ESTIMATING VEHICLE VELOCITY USING RECTIFIED IMAGES
555

Figure 11: Representation of a blob overlying another.
Figure 12: Result of the employment of the failsafe process
to the image shown on Figure 11.
Figure 11 illustrates a segmented image where the
overlappingof two blobs is visible. On the other hand,
Figure 12 shows the result of the employment of fail-
safe process to image shown in Figure 11. As it can be
quite easily seen, the failsafe process does not employ
morphological operations to the segmented image and
uses more permissive parameters in the detection of
blobs. The final step in this process uses the estimated
positions and estimated velocity provided from the
Kalman filter and performs data management. More
specifically, inserts new vehicles in to a linked list, re-
moves vehicles that are no longer acknowledged on
the segmented image or simply just updates data. In
this context, an object’s velocity is linear and there-
fore, once known the image sequence’s framerate, es-
timating vehicle velocity is quite straightforward, as
can be seen in the following expressions:
v
x
=
dx
dt
≃ 3, 6.∆x. f.s [km/h]
v
y
=
dy
dt
≃ 3,6.∆y. f.s [km/h] (12)
where ∆x and ∆y are the estimated displacements
in pixels between two consecutive images, s the
scale factor previously obtained and f the framerate.
Nonetheless, it is important to state that expression
(12) estimates vehicle velocity in kilometers per hour.
However, in order to obtain this estimation in another
unit system, the procedure is quite similar.
This application can also count the sum of vehicles
that travel on the observed scenario. To do so, an
analysis is made to a control flag which indicates if
a vehicle hasn’t already been taken into account. The
referred analysis is preformed in the middle region of
the straightened image due to the fact that this region
has a higher probability of including all of the high-
way lanes. Given the fact that all the vehicles have
associated an identification of the lane where these
pass through it is quite simple to calculate the mean
velocity of each lane.
5 RESULTS
In this section we present several rectified images and
two images that exemplify velocities obtained for sev-
eral vehicles on two consecutive images. Figures 13
and 14 illustrate the results of the employment of the
rectification process to images captured by two differ-
ent surveillance cameras. The images on the left hand
side of each figure show the captured images to which
the process is applied, while the images on the right
hand side are the images achieved using the rectifica-
tion process.
Figure 13: Example of a captured image (on the left) and
the correspondent rectified image (on the right).
Figure 14: Example of a captured image (on the left) and
the correspondent rectified image (on the right).
Figure 15 illustrates the tracking system in two
consecutive frames. In both images of this figure,
one may see each vehicles estimated velocity, the sum
of vehicles counted until that instant and each lanes
mean vehicle velocity which is represented on the up-
per left side of each image. Labeling each lane and
vehicle simplifies the task of estimating each lanes
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
556
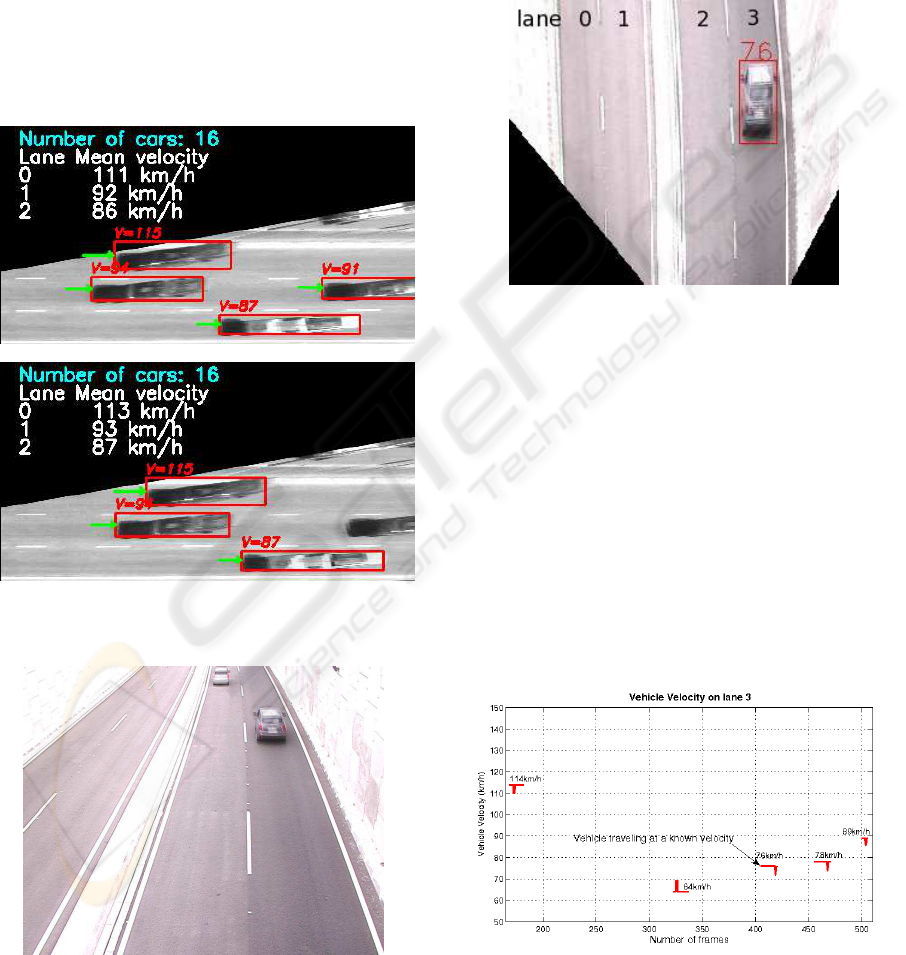
mean vehicle velocity. Therefore, each lane is identi-
fied by an incremental numerical id. For instance, the
uppermost lane is labeled on the image as lane 0, the
lane below as lane 1 and finally the bottommost lane
as lane 2. By examining the mean vehicle velocity as-
sociated to each identified lane, one may observe that
the lane identified as lane 0 has the highest mean ve-
locity. Given the fact that this lane represents the ac-
celeration lane, this observation was not unexpected.
To conclude it is important to state that the green vec-
tors represented on each image of Figure 15 illustrate
the motion vectors for each identified vehicle, while
the estimated velocities in km/h are illustrated in red
above each vehicle.
Figure 15: Estimation of vehicle velocity in two consecutive
frames.
Figure 16: Captured image of the vehicle traveling at a
known velocity.
In order to establish the error associated to the ve-
hicle velocity estimation, the algorithm was applied
to a video sequence containing a vehicle traveling at
a known velocity. The referred vehicle is shown in
Figure 16 and was traveling at 74.5 km/h according
to a GPS system. To estimate this vehicle’s velocity
the rectification process was applied as can be seen in
Figure 17. This Figure also shows the vehicle’s esti-
mated velocity between two consecutive frames.
Figure 17: Representation of the vehicle traveling at a
known velocity.
The result obtained applying the previously re-
ferred algorithm has an error of 2%, considering that
the vehicle’s real velocity was 74.5 km/h, measured
by a GPS system. The graphic represented in Figure
18 illustrates estimated velocities obtained by track-
ing several vehicles in consecutiveframes of the video
sequence represented in Figure 17. Analyzing this
Figure it is possible to observe that the instantaneous
velocities, estimated in each frame, are influenced by
noise caused by the lack of robustness of the segmen-
tation process. Figure 18 also represents the estimated
velocities of the vehicle traveling at a known velocity
on the ground plane.
Figure 18: Graphic illustrating the velocities of several ve-
hicles on lane 3.
ESTIMATING VEHICLE VELOCITY USING RECTIFIED IMAGES
557

6 CONCLUSIONS
This paper describes a technique to obtain a bird eye
view of the ground plane in order to estimate vehi-
cle velocity. The method requires no knowledge of
camera parameters, only needs two known lengths of
the highway. The rectification technique also requires
that highway lanes and lane boundaries be approxi-
mately straight in the region of surveillance near the
camera. This method was tested on different traffic
sequences, providing fine results. To conclude, it is
important to state that this procedure can be employed
in other automatic traffic surveillance systems.
REFERENCES
Bose, B. and Grimson, E. (2003). Ground plane rectifi-
cation by tracking moving objects. In Proceedings
of the Joint IEEE International Workshop on Visual
Surveillance and Performance Evaluation of Tracking
and Surveillance.
Dailey, D. J. and Cathey, F. W. (2005). A novel technique to
dynamically measure vehicle speed using uncalibrated
roadway cameras. In Proceeding IEEE.
Fischler, M. A. and Bolles, R. C. (1981). Random sample
consensus: A paradigm for model fitting with applica-
tions to image analysis and automated cartography. In
Comm.Assoc. Comp. Mach.
Kalman, R. E. and Bucy, R. S. (1960). New results in linear
filtering and prediction theory. In Transactions of the
ASME, Journal of Basic Engineering (Series D).
Lazaros Grammatikopoulos, George Karras, E. P. (2002).
Automatic estimation of vehicle speed from uncali-
brated video sequences. In International Archives of
Photogrammetry and Remote Sensing.
Liebowitz, D. and Zisserman, A. (1998). Metric rectifica-
tion for perspective images of planes. In Proceedings
of Computer Vision and Pattern Recognition.
Lucas, B. D. and Kanade, T. (1981). An iterative image
registration technique with an application to stereo vi-
sion. In Proceedings DARPA Image Understanding
Workshop.
Schoepflin, T. and Dailey, D. J. (2003). Dynamic camera
calibration of roadside traffic management cameras
for vehicle speed estimation. In IEEE Transactions
on Intelligent Transportation Systems.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
558
