
CORNER DETECTION ON CURVES
Neeta Nain, Vijay Laxmi and Bhavitavya Bhadviya
Department of Computer Engineering, Malaviya National Institute of Technology Jaipur, JLN Marg, Jaipur-302017, India
Keywords:
Corners, Chain Code, Difference Code, Curvature.
Abstract:
Detection of discontinuity plays an important role in image registration, comparison, segmentation, time se-
quence analysis and object recognition. In this paper we address some aspects of analyzing the content of an
image. A point is classified as a corner where there are abrupt changes in the curvature of the curve. This paper
presents a new approach for corner detection using first order difference of chain codes. Since the proposed
method is based on integer operations it is simple to implement and efficient. Preliminary results are presented
and evaluation with respect to standard corner detectors is done as a benchmark.
1 INTRODUCTION
An edge (Gonzalez and Woods, 2000), by definition,
is that where drastic change in value from one spot
to the next either in intensity level of an image or in
one’s own eyes takes place. In the digital world, an
edge is a set of connected pixels that lie on the bound-
ary between two regions. Similarly corner detection
(M. Sonka and Boyle, 1993) is identification of high
curvature points on planar curves which is referred to
as boundary of an image. A corner can also be de-
fined as the intersection of two edges or, as a point for
which there are two dominant and different edge di-
rections in a local neighborhood. Corners play a dom-
inant role in shape perception by humans. They play
crucial role in decomposing or describing the object.
They are used in scale space theory, image represen-
tation, reconstruction, matching and as preprocessing
phase of outline capturing systems.
This paper proposes a new difference chain encoding
algorithm for corner detection in images. The task
of finding corners is formulated as a three step pro-
cess. In the first step we extract one pixel thick noise-
less boundary by using various morphological opera-
tions. The extracted boundary is chain encoded using
m-connectivity (Gonzalez and Woods, 2000). In the
second step we apply chain smoothing procedures to
remove false corners by suppressing regular intensity
changes. The final step calculates difference codes
and then abrupt changes are identified in them to de-
tect significant corners.
2 EXISTING TECHNIQUES
Many corner detection algorithms have been pro-
posed in the literature. Rosenfeld and John-
ston (Rosenfeld and Johnston, 1973) calculate cur-
vature maxima points using k-cosines as corners.
Rosenfeld and Wezka (Rosenfeld and Wezka, 1975)
proposed a modification of (Rosenfeld and Johnston,
1973) in which averaged k-cosines were used. Free-
man and Davis (Freeman and Davis, 1977) found
corners at maximum curvature change in which they
move a straight line segment along the curve. An-
gular differences between successive segments was
used to measure local curvature. Beus and Tiu (L.
and Tiu, 1987) algorithm was similar to (Freeman
and Davis, 1977) except they proposed arm cutoff
parameter τ to limit length of straight line. Smith’s
algorithm (Smith and Brady, 1997) involves generat-
ing a circular mask around a given point in an im-
age and then comparing the intensity of neighbor-
ing pixels with that of the center pixel, and repeating
the procedure for each pixel within the image. Har-
ris corner detector (Harris and Stephens, 1988) com-
putes locally averaged moment matrix computed from
the image gradients, and then combines the eigen-
values of the moment matrix to compute a corner
“strength”, of which maximum values indicate the
corner positions. Yung’s (He and Yung, 2004) al-
gorithm starts with extracting the contour of the ob-
ject of interest, and then computes the curvature of
this contour with Gaussian derivative filters at var-
127
Nain N., Laxmi V. and Bhadviya B. (2008).
CORNER DETECTION ON CURVES.
In Proceedings of the Third International Conference on Computer Graphics Theory and Applications, pages 127-133
DOI: 10.5220/0001094801270133
Copyright
c
SciTePress

ious scales. Local extremes of the product of the
curvatures at different scales are reported as cor-
ners when the value of the product exceeds a thresh-
old. There are various other techniques like wavelets,
Hough transform, neural networks etc using which
corners can be extracted as described in (P and Horng,
1994), (Liu and Srinath, 1990), (Tsai. D.M and Su,
1999), (E.Rosten and Drummong, 2006), (Quddus
and Gabbouj, 2002), (Shen and Wang, 2002), (Sojka,
2002), (Olague and Hernandez, 2005), (Bergevin and
Bubel, 2004), (Bergevin and Bubel, 2003),
3 CORNER DETECTION
It has long been known that information about shape
is conveyed via the changes in the slope of an object’s
boundary.
Algorithm 1 Pseudocode for Calculating -
Corners(S
i
).
Require: S
i
: List of boundary points S, for i = 1, 2, ··· , N
N ! = 0;
Ensure: : Corners of the Curve S
Initialization
l = (N)
1
4
{Calculate Edge length parameter}
procedure Corners(S
i
)
1: Extract Boundary
2: Chain Encode Boundary. Assign BC codes.
3: Calculate Slope.
φ
i
= tan
−1
(
π
4
BC
i
)
4: Smooth the boundary. Calculate MC codes.
5: Calculate Curvature.
δφ
i
= φ
i+1
− φ
i
DC
i
= mod
8
(MC
i+1
− MC
i
+ 8)
6: Avoid false corners.
7: if (MC
i
= MC
i−n(n=1,2,...,l)
) then
8: false corner at i
th
position.
9: end if
10: Find true corners.
11: if (P
i
− P
i−1
> l) then
12: true corners at P
i
and P
i−1
positions
13: end if{P
i
- Position of isolated non-zero DC
0
s.}
14: end procedure
The rate of change of slope is called curvature. The
information content is greatest where curvature is
maximum in a local neighborhood of points. We
present a method of estimating the curvature of a pla-
nar curve, and detecting high-curvature points as cor-
ners on such curves. Digital images are acquired and
processed in a grid format with equal spacing in the
x and y direction. Slope and curvature are difficult
to compute precisely in the digital domain, since the
angle between neighboring pixels is quantized by 45
◦
increments. The basic idea is to estimate the tangent
orientation using edge points that are not adjacent in
the edge list. This allows a larger set of possible tan-
gent orientations. Let P
i
= (x
i
, y
i
) be the coordinates
of edge point i in the edge list. The l−slope is the (an-
gle) direction vector between points that are l edges
apart. The left l−slope is the direction from P
i−l
to
P
i
, and the right l−slope is the direction from P
i
to
P
i+l
. The l−curvature is the difference between the
left and right l−slopes. We identify a corner at the
max(l − curvature). The detailed proposed algo-
rithm is summarized in Algorithm. 1
4 IMPLEMENTATION DETAILS
The proposed technique of corner detection is based
on finding vertex points on the boundary curve where
two straight line segments meet. The length of the
straight line segment is taken as a parameter l called
pixel neighborhood or edge length. The algorithm
identifies the points where the curvature is highest in
a neighborhood of ±l pixels. The threshold value l,
for our experiments when taken as
l = (BoundaryLength)
1
4
(1)
fourth root of the boundary length gives excellent
results. If l is taken less than our threshold then false
corners will be generated as it will capture all the
small curvature changes also. While a larger value
will miss significant corners. We define the lower
bound on l as atleast ≥ 3. This defines a corner at the
intersection of two edges of atleat 3 pixels length.
4.1 Boundary Extraction
To extract corners we need precise, compact and
continuous in a segment boundary. One-pixel thick
m-connected boundary is extracted using our own
morphological algorithm (Neeta Nain and Agarwal,
2006). One-pixel thick, and m-connectivity avoids
redundancy in chain codes. This boundary is chain-
encoded using 8−way chain encoding (Freeman and
Davis, 1977) method. The boundary chain (BC)
codes are notations for recording the list of edge
points along a contour. The BC code specifies the di-
rection of a contour at each edge point in the edge
list. When 8−way connectivity is used, directions are
quantized into one of eight directions as shown in Fig-
ure 1.
GRAPP 2008 - International Conference on Computer Graphics Theory and Applications
128
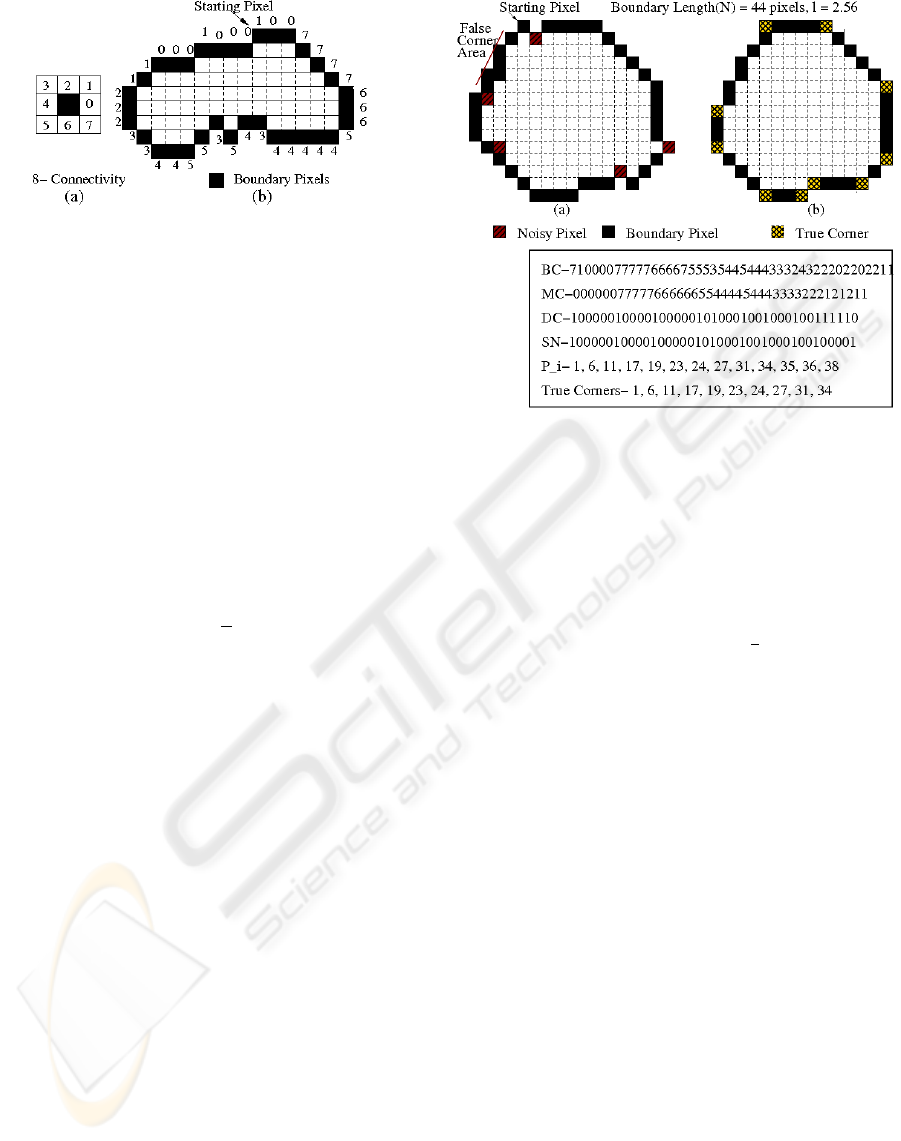
Figure 1: Example: Assignment of Boundary Chain(BC)
codes.
The 360
◦
is divided into eight directions. Each direc-
tion specifying 45
◦
angle from the previous. Thus a
chain code could be generated by starting at the first
point in the edge list and going clockwise around the
contour, the direction to the next edge point is speci-
fied using one of the eight chain codes. The direction
is the chain code for the 8−neighbor of the edge. The
chain-code varies from (0..7) in anti-clockwise direc-
tion, where 0 means moving one unit in x direction
making angle 0
◦
with the x- axis, code 1 represents
45
◦
from x−axis and so on. The BC code thus codes
the slope of the current pixel with the previous.
The slope at pixel i is
φ
i
= tan
−1
(
π
4
BC
i
) (2)
4.2 Boundary Smoothing
Due to side effects of scan-conversion or aliasing
effects, a straight line in the pixel form is not drawn
as a straight line, but it has some regular changes
also called stair-step effects. The problem gets more
complicated when the radius of curvature is small on
the boundary, or in other words if the slope changes
fast in a small neighborhood of points. Then if we
capture all these slope changes then we generate false
corners. We need to identify only abrupt significant
curvature changes on the boundary to detect signifi-
cant corners.
To remove the stray pixels from the boundary in
the neighborhood of ±l pixels, which is equivalent of
convolving with an lxl averaging mask, the BC codes
are further modified, called Modified Chain (MC)
codes. The modification step smoothens the bound-
ary, removes noise and thus removes false corners
from boundary.
• Remove spurious single pixels from the bound-
ary.
– One pixel breaks in straight line, where there
Figure 2: (a)Original boundary, (b) Single stray pixels re-
moved after smoothing step.
is only one isolated pixel above the break. A
V made by a set of pixels.
– One pixel thick diagonal line with one extra
pixel in 4-neighborhood of any of the pixel of
this diagonal line. A L made by a set of pixels.
A run of l constant BC codes represents an
edge of length l, with slope =
π
4
BC. If between
two edges of length atleast l, there are three
stray pixels making an angle 45
◦
then we
smooth them. Table 1 shows some of the
modification for BC codes to smooth the
stray pixels. For pixel i if the left l−slope
depicted by BC
i−l
to BC
i
, and the right l−slope
depicted by BC
i
to BC
i+l
is same and there
are three continous pixels with different
BC
i
we modify them as shown in Table 1.
For example, refer Figure 2(a), its BC code
=(710000777776666755535445444333243222
02202211). After removing the spurious single
pixels from the boundary MC code = 00000077
77766666655444454443333222121211. Fig-
ure 2(b) shows the result of the smoothing step.
• This smoothing step is done only when the ap-
plication requires the convex hull or the bound-
ing extent of the figure and its corners.
Align stray single pixels along the dominant
slope in a 3x3 neighborhood. Where dominant
slope is max (count(BC
i±n(n=1,2,3)
))
For current pixel position i
– If BC
i+n(n=1,2)
= BC
i−n(n=1,2)
AND BC
i
6=
BC
i±n
then BC
i
= BC
i+1
.
– If (BC
i−n(n=1,2)
= BC
i+1
AND 6= BC
i
) OR
CORNER DETECTION ON CURVES
129
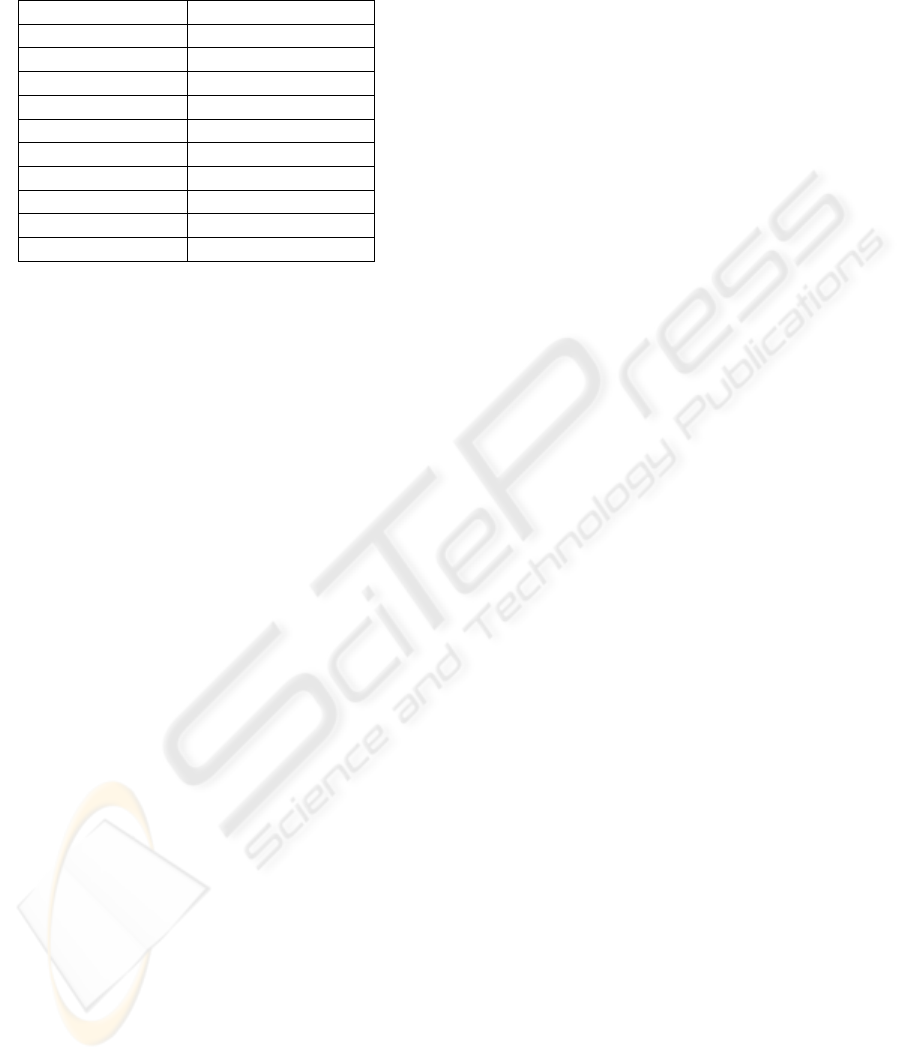
Table 1: Code modifications for smoothing stray pixels
from the boundary.
Current BC Codes Modified MC Codes
(0, 7, 1) / (0, 1, 7) (0, 0)
(2, 3, 1) / (2, 1, 3) (2, 2)
(4, 5, 3) / (4, 3, 5) (4, 4)
(6, 5, 7) / (6, 7, 5) (6, 6)
(1, 2, 0) / (1, 0, 2) (1, 1)
(3, 4, 2) / (3, 2, 4) (3, 3)
(5, 6, 4) / (5, 4, 6) (5, 5)
(7, 0, 6) / (7, 6, 0) (7, 7)
(2, 0, 2) (2, 1)
(4, 6, 4) (4, 4)
(5, 3, 5) (5, 4)
(BC
i+n(n=1,2)
= BC
i−1
AND 6= BC
i
) then
BC
i
= BC
i+1
(or BC
i
= BC
i−1
).
– If (BC
i−n(n=1,2)
= BC
i+2
AND BC
i
6= BC
i+2
)
OR (BC
i+n(n=1,2)
= BC
i−2
AND BC
i
6= BC
i−2
)
then BC
i
= BC
i+2
(or BC
i
= BC
i−2
).
This step modifies all the spurious codes
on the curve and aligns the stray pixels
along the dominant slope of the line. For
example, after this step the false corner
area marked in Figure 2(b) will get smooth
along 45
◦
. The MC code after this step
=000000777776666665544444444333322222
1111, depicting the convex hull of the figure
smoothing all the small edges in the direction
of the dominant slope.
4.3 Avoid False Corners
Let for pixel position i, If MC
i
6= MC
i−1
, then
it is called the first occurrence of MC code.
If the first occurrence MC
i
= MC
i±n(n=1,2,...,l)
,
then the i
th
position is not a corner.
For our example, N(BoundaryLength) =
44; l = 2.56, and the MC code =
0000007777766666655444454443333222121211,
then its first occurrence MC code positions are
(1, 6, 11, 17, 19, 23, 24, 27, 31, 34, 35, 36, 37, 39). The
MC code at (35, 36, 37, 39, 40)
th
position already ex-
ists in previous or next codes within a neighborhood
of l = 2.56, and thus are positions of false corners
and not marked.
4.4 Find True Corners
The curvature of the curve is obtained by calculating
the first derivative of the MC code. The first deriva-
tive of the MC code, obtained by first difference of
the MC code, is a rotation-invariant boundary descrip-
tion. The curvature at current pixel i is δφ
i
= φ
i+1
−φ
i
,
which is calculated as
DC
i
= mod
8
(MC
i+1
− MC
i
+ 8) (3)
The first order difference code (DC) on the MC
codes represents this curvature or turning angle from
the previous point. If DC
i±l
= 0 it is an edge. Let
P
i
denotes the position of isolated non-zero DC
in a sequence of zero DC
0
s. If P
i
− P
i−1
≥ l (the
difference between consecutive positions of isolated
non zero DC’s). Then there are true corners at P
i
and P
i−1
positions. For our example, the MC code =
(0000007777766666655444454443333222121211),
its DC = (00000700007000007070001700700070071
7170)(DC code is calculated by treating the MC code
as a circular chain). The non-zero DC positions P
i
are (1, 6, 11, 17, 19, 23, 24, 27, 31, 34, 35, 36, 37, 39).
The difference between non zero DC positions
≥ l(= 2.57), at (1, 6, 11, 17, 19, 23, 24, 27, 31, 34)
th
positions hence they are identified as true corners as
shown in Figure 2(b).
5 TEST RESULTS
A corner detection algorithm must be tested on a va-
riety of shapes for its proper evaluation. Our test
images include most variety of variations in curva-
ture, corner sharpness and noise/irregularities along
the boundary curves. Such variations are expected in
real life images. Our corner detector gives single, lo-
calized and accurate response to corners. Compari-
son is also done with two popular algorithms namely
Harris (Harris and Stephens, 1988) and Yung (He and
Yung, 2004) with their default parameters. Table 2
and Figures 3, 4 and 5 shows the results. Both Harris
and Yung miss true corners on small curvature curves.
Our corner detector gives excellent results even in the
presence of noise like Gaussian, Poisson, and Speckle
etc., while both Harris (Harris and Stephens, 1988)
and Yung (He and Yung, 2004) are not invariant to
noise. They eliminate some true corners and also in-
troduce false corners due to noise. Noisy test images
are generated by adding Gaussian noise with 0 mean
and 0.01 variance as default values. Poisson noise is
generated from the image data following Poisson dis-
tribution. Salt-and-Pepper noise is generated with a
noise density of 0.02, and Speckle noise is a multi-
plicative uniformly distributed noise with 0 mean and
variance 0.04. Our algorithm is invariant to Gaussian,
Poisson and Speckle noise and extracts all true cor-
ners as shown in Figure 6. Though it generates some
GRAPP 2008 - International Conference on Computer Graphics Theory and Applications
130
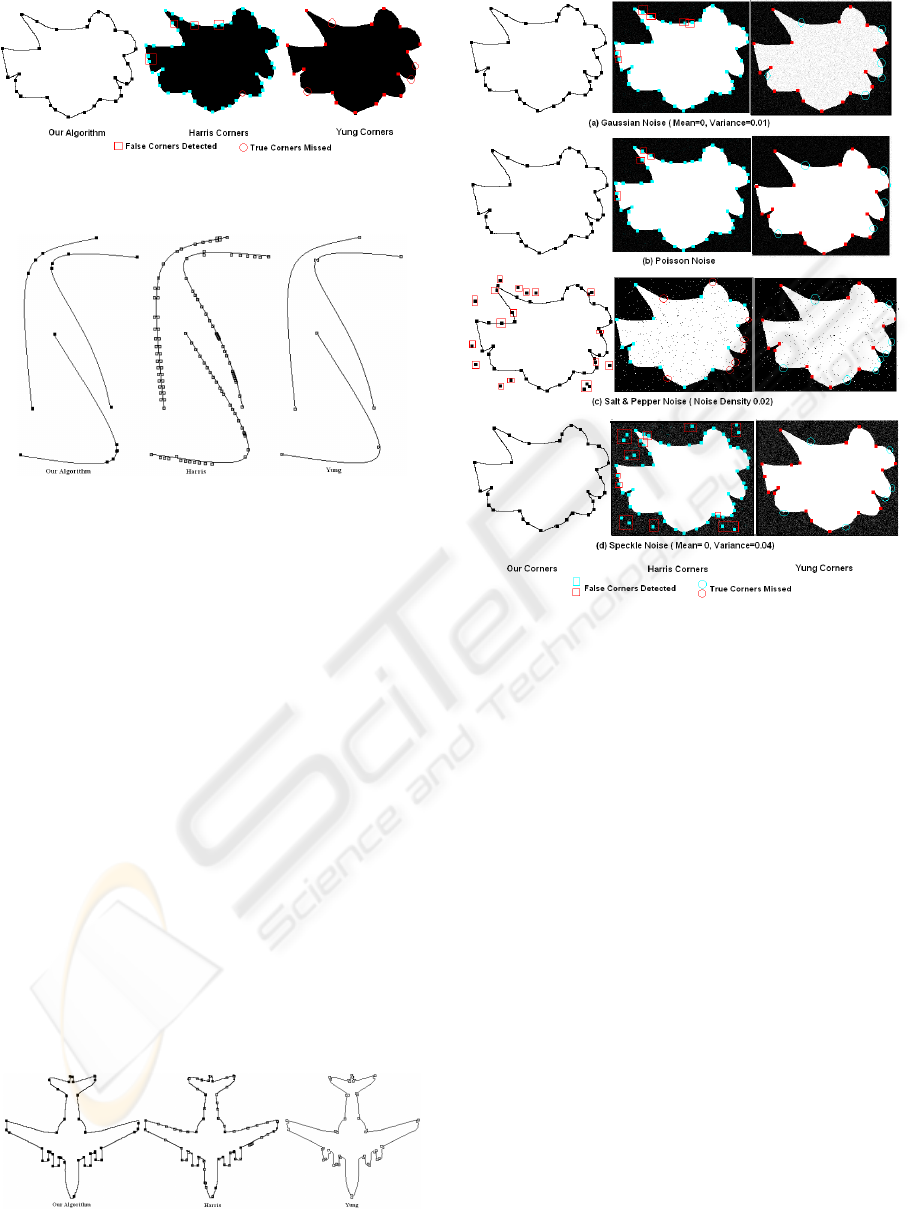
Figure 3: Test image with sudden changes in curvature.
Figure 4: Test image with smooth changes in curvature.
false corners in Salt-and-Pepper noisy images. We
can overcome this problem by eroding the small im-
age segments introduced by noise.
6 AFFINE TRANSFORMATION
INVARIANCE
Any transformation effects like translation, rotation,
shearing and minor size variations should not effect
corner detection results. Our algorithm is affine trans-
formation invariant.
1. Translation Invariance: Corners are calculated
on the first order differences of the chain codes.
The first difference in the chain codes makes the
boundary translation invariant as they represent
the turning angles from the previous point.
2. Scale Invariance: To expand or to contract a chain
by a specified scale factor, one must appropri-
ately scale each chain link and then re quantize.
Figure 5: Test image with straight lines and curves.
Figure 6: Corners extracted on noisy images (a) Gaussian
Noise, (b) Poisson Noise, Salt-n-Pepper Noise, (d) Speckle
Noise.
In down sampling, a number of links may merge
into one, and in up-sampling one link may cause
a string of many links to be generated. The gen-
eration of these new links is most easily handled
by using Bresenham scan conversion technique.
Compared to up sampling, down sampling is ro-
bust to aliasing effects. We down sample the
boundary to a constant size before chain coding.
This re sampling makes the corner detector scale
invariant.
3. Orientation Invariance: The derivative of the MC
code, also called DC code, obtained by using first
difference, is a rotation-invariant boundary de-
scription. Further We align the boundary with
minimum angle with the x− axis. This is done
by circularly shifting the DC
0
s and starting with
the first difference of smallest magnitude. Circu-
lar shift makes the boundary rotation invariant and
the corners extracted on this boundary will be ro-
tation invariant.
The test results of our transformation invariant cor-
ner detection algorithm on the standard test image is
shown in Figure 7.
CORNER DETECTION ON CURVES
131
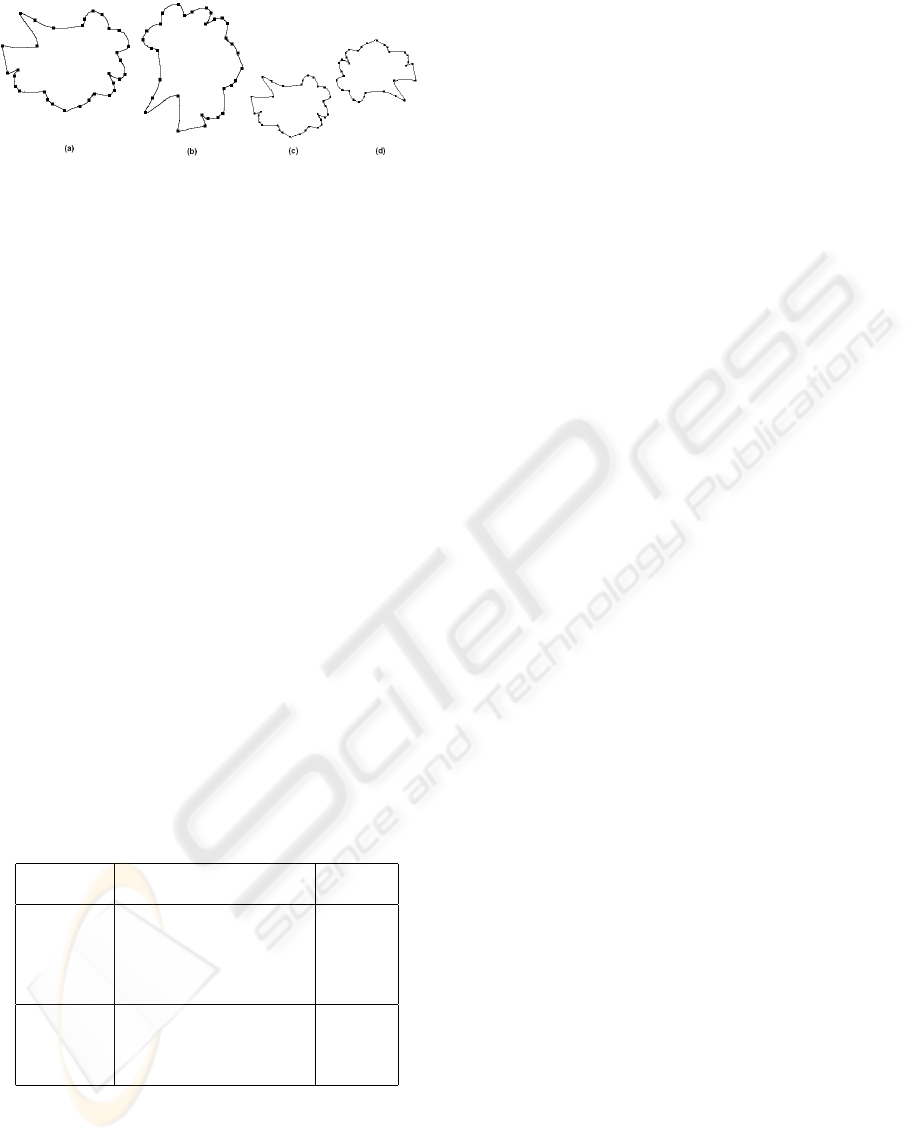
Figure 7: Transformation invariance of corner extractor(a)
Original (b) Rotated by 90
◦
, (c) Scaled 50% (d) Scaled 50%
and Rotated 180
◦
.
7 CONCLUSIONS
In this paper we proposed a novel simple, efficient and
transformation invariant method for corner detection
which uses only integer arithmetic for approximation
of curvature on curve boundary. The algorithm de-
pends on only one parameter l. The parameter l, can
be assigned a constant value as per personal prefer-
ence of neighborhood, and it is also adaptive to the
length of the boundary curve. Experimental results
show that l taken as fourth root of boundary length is
sufficient for extracting good corners. The parameter
l is therefore both local and global in nature. Com-
parative study on various noiseless and noisy images
has been done. Finally, the comparison between the
proposed approach and other corner detectors show
that our approach is more competitive with respect to
Harris (Harris and Stephens, 1988) and Yung (He and
Yung, 2004) under similarity and affine transforms.
Moreover, a number of experiments also illustrate that
our corner detection has more robustness to noise.
Table 2: Comparison of corner detectors on Figures 3, 4
and 5.
Corner Results Figure
Detector
Yung True Corners Missed on 3
Curved Edges
Harris Poor True Corners even
on Significant Curvature
Change.False Corners
even on Small Curvature
Change 3, 4, 5
Our All True Corners, No
Algorithm False Corners. Better
Approximation of
Curvature Change 3, 4, 5
Corners extracted from this technique could be used
in various shape analysis (Neeta Nain and Agarwal,
2007), size measurement and boundary reconstruc-
tion applications. From the extracted corners we can
easily reconstruct the boundary by fitting straight line
segments between corners. This can be used as the
convex hull or an approximation to the object’s shape.
REFERENCES
Bergevin, R. and Bubel, A. (2003). Object-level structured
contour map extraction. Computer Vision and Image
Understanding, 91(3):302–334.
Bergevin, R. and Bubel, A. (2004). Detection and charac-
terization of junctions in a 2d image. Computer Vision
and Image Understanding, 93(3):288–309.
E.Rosten and Drummong, T. (May 2006). Machine learning
for high-speed corner detection. European Conference
on Computer Vision, Citeseer.
Freeman, H. and Davis, L. S. (1977). In A Corner Finding
Algorithm for Chain Coded Curves, volume 26, pages
297–303. IEEE Transaction in Computing.
Gonzalez, R. C. and Woods, R. E. (2000). Digital Image
Processing. Addison Wesley Longman, 2nd edition.
Harris, C. and Stephens, M. (1988). In A Combined Cor-
ner and Edge Detector, volume 23, pages 189–192.
Proceedings of 4th Alvey Vision Conference, Manch-
ester.
He, X. C. and Yung, N. H. C. (2004). Curvature scale
space corner detector with adaptive threshold and dy-
namic region of support. In ICPR ’04: Proceedings
of the Pattern Recognition, 17th International Confer-
ence on (ICPR’04) Volume 2, pages 791–794, Wash-
ington, DC, USA. IEEE Computer Society.
L., B. H. and Tiu, S. S. (1987). In An Improved Corner
Detection Based on Chain Coded Plane Curves, vol-
ume 20, pages 291–296. Pattern Recognition Letters.
Liu, H. and Srinath, M. (1990). In Corner Detection from
Chain Code, volume 23, pages 51–68. Pattern Recog-
nition Letters.
M. Sonka, V. H. and Boyle, R. (1993). Image Processing
Analysis and Machine Vision. Chapman and Hall, 2nd
edition.
Neeta Nain, Vijay Laxmi, A. K. J. and Agarwal, R. (2006).
In Morphological Edge Detection and Corner De-
tection Algorithm Using Chain-Encoding, volume II,
pages 520–525. The 2006 International Conference on
Image Processing, Computer Vision, Pattern Recog-
nition, Las Vegas, Nevada, USA.
Neeta Nain, Vijay Laxmi, M. K. and Agarwal, D. (2007).
Transformation invariant robust shape analysis. In The
2007 International Conference on Image Processing,
Computer Vision and Pattern recognition, pages 275–
281, Nevada, USA. CSREA Press.
Olague, G. and Hernandez, B. (2005). A new accurate and
flexible model based multi-corner detector for mea-
surement and recognition. Pattern Recognition Let-
ters, 26(1):27–41.
P, C. S. and Horng, J. H. (1994). In Corner Point De-
tection Using Nest Moving Average, volume 27(11),
pages 1533–1537. Pattern Recognition Letters.
Quddus, A. and Gabbouj, M. (2002). Wavelet-based cor-
ner detection technique using optimal scale. Pattern
Recogn. Lett., 23(1-3):215–220.
GRAPP 2008 - International Conference on Computer Graphics Theory and Applications
132

Rosenfeld, A. and Johnston, E. (1973). In Angle Detec-
tion on Digital Curves, volume C-22, pages 875–878.
IEEE Transactions on Computers.
Rosenfeld, A. and Wezka, J. S. (1975). In An Improved
Method of Angle Detection on Digital Curves, volume
C-24, pages 940–941. IEEE Transactions on Comput-
ers.
Shen, F. and Wang, H. (2002). Corner detection based on
modified hough transform. Pattern Recognition Let-
ters, 23(8):1039–1049.
Smith, S. M. and Brady, J. M. (1997). Susana new approach
to low level image processing. volume 23, pages 45–
78, Hingham, MA, USA. Kluwer Academic Publish-
ers.
Sojka, E. (2002). A new algorithm for detecting corners
in digital images. In SCCG ’02: Proceedings of the
18th spring conference on Computer graphics, pages
55–62, New York, NY, USA. ACM Press.
Tsai. D.M, H. H. and Su, H. J. (1999). In Boundary Based
Corner Detection Using Neural Networks, volume 20,
pages 31–40. Pattern Recognition Letters.
CORNER DETECTION ON CURVES
133
