
GPU-BASED NORMAL MAP GENERATION
Jesús Gumbau, Carlos González
Universitat Jaume I. Castellón, Spain
Miguel Chover
Universitat Jaume I. Castellón, Spain
Keywords: GPU, normal maps, graphics hardware.
Abstract: This work presents a method for the generation of normal maps from two polygonal models: a very detailed
one with a high polygonal density, and a coarser one which will be used for real-time rendering. This
method generates the normal map of the high resolution model which can be applied to the coarser model to
improve its shading. The normal maps are completely generated on the graphics hardware.
1 INTRODUCTION
A normal map is a two-dimensional image whose
contents are RGB colour elements which are
interpreted as 3D vectors containing the direction of
the normal of the surface in each point. This is
especially useful in real-time applications when this
image is used as a texture applied onto a 3D model,
because normals for each point of a model can be
specified without needing more geometry. This
feature enables the use of correct per-pixel lighting
using the Phong lighting equation.
Normal map generation is a key part in real-time
applications, such as video-games or virtual reality,
due to the intensive use of techniques such as
normal-mapping, used to increase the realism of the
scenes.
Compared to traditional per-vertex lighting, per-
pixel lighting with normal maps gives the rendered
model a great amount of surface detail, which can be
appreciated through the lighting interactions of the
light and the surface. Figure 1 shows the effect of
applying a normal, extracted from a highly detailed
model, onto a coarser mesh which is used for
rendering the model in real-time without almost
losing quality. This technique gives detail to meshes
without having to add real geometric detail.
Altough normal maps can be easily generated
when both the reference and the working meshes use
a common texture coordinate system, this is not
always the case and thus, it is not trivial to
implement on the graphics hardware. This is the
reason why this kind of tools are often implemented
on software.
The high programmability of current graphics
hardware allows for the implementation of these
kinds of methods on the GPU. This way, the great
scalability of the graphics hardware, which is
increased even more each year, can be used to
perform this task.
2 STATE OF THE ART
Some other authors have presented works about the
generation of normal maps for simplified meshes.
(Sander, 2001) (Soucy, 1996) (Cignoni, 1998)
generate an atlas for the model so that they can
sample the colour and normal values of the surface
to be stored in a texture, which will be applied over
a simplified version of the same original model.
However, these methods need the coarse version of
the mesh to be a simplified version of the sampled
mesh, which is a disadvantage. The method
proposed in this work does not have this limitation,
the only limitation; of our work is that the two
objects involved must have the same size, positions
and shape in the space.
62
Gumbau J., González C. and Chover M. (2008).
GPU-BASED NORMAL MAP GENERATION.
In Proceedings of the Third International Conference on Computer Graphics Theory and Applications, pages 62-67
DOI: 10.5220/0001097100620067
Copyright
c
SciTePress

Figure 1: Normal mapping example: the figure on the right shows the results of applying the normal map generated from
the high resolution mesh (left) and its coarse representation (middle).
Although other authors (Wang, 2002)
implementation takes advantage of graphics
hardware for the generation of normal maps, they do
not exploit it completely as they only use the
rasterizing stage of the GPU, performing other tasks
on the CPU. Moreover, this method has some
limitations: it can not generate the normals for faces
that are occluded by other parts of the model, and it
does not fully take advantage of the graphics
hardware capabilities, having to perform some read
backs from the colour buffer.
On the other hand, (Gumbau, 2006) present an
extremely fast method to calculate normal maps on
the GPU. However, it has a strong limitation: the
normal map generated from a mesh A to be applied
to a mesh B can be generated if and only if the mesh
B has been generated from a simplification process
applied to the mesh A, and the distribution of texture
coordinates fulfil some special requirements. These
strong limitations enable the normal map to be
generated very fast, but it can only be used in very
specific and controlled situations.
Finally, there exist some applications (NVIDIA)
that use ray tracing to calculate the normal map in a
very precise way. Their disadvantage is that they do
not benefit from the graphics hardware, and thus
they will not be explained.
3 METHOD
The method presented in this paper generates the
normal map completely on the GPU, so that all the
work is performed by the graphics hardware. This
has the advantage of taking profit of a highly
parallelizable hardware which will quickly
increment its performance in the next years. Coarse
versions of highly detailed meshes are often
modelled from scratch (as in the video game
industry for example), so we can not expect any
correspondence between the two meshes other than
geometric proximity. Having this in mind, this
method avoids the requirement of generating the
coarse mesh from the highly detailed mesh, and, as a
consequence, they can be modelled separately.
3.1 Main Idea
Let M
HR
and M
LR
be two polygonal meshes so that
M
LR
is a coarse representation of M
HR
. We define
the normal map MN as a two-dimensional texture
which can be used as input for normal mapping. Our
goal is to calculate MN on the GPU.
We assume that M
LR
is a good approximation of
M
HR
and that both are situated in the same spatial
position, and have the same sizes and orientation.
Basically, to calculate MN, one render of M
HR
will
be performed for each triangle (T) of M
LR
,
discarding those parts of the model projected outside
T. For every fragment of M
HR
projected through T,
the direction of the normal will be extracted and
stored into MN, using the texture coordinates of T to
calculate the exact position inside the texture. Easily
explained, the algorithm works as: the normals of all
those pixels of the high resolution mesh rendered
through the window formed by the triangle T will
become the part of the normal map applied to T.
This way, M
HR
is used as a three-dimensional grid
which contains information about how to render
M
HR
.
Texture coordinates of M
HR
must be fully
unwrapped in a way that there are no triangles
overlapped in texture space.
3.2 Transformation Matrices
For each iteration of the algorithm, a transformation
matrix (which encapsulates the model, view and
projection transformations) must be calculated. This
matrix transforms the triangle T (composed by the
vertices v0, v1 and v2) to the two-dimensional
GPU-BASED NORMAL MAP GENERATION
63

triangle t (composed by the texture coordinates of T:
t0, t1 and t2).
Figure 2 shows this process. Once obtained, this
matrix will be applied to every vertex of M
HR
, so
that all the triangles visible through T will be
projected onto the area defined by t.
Figure 2: The transformation matrix which converts the
3D triangle T into a 3D triangle composed by the texture
coordinates of T must be calculated at each step.
3.2.1 Model/View Matrix Calculation
The model/view matrix (MV) is derived from the
three parameters that define a virtual camera which
will be configured so that its viewing direction is
parallel to the normal of T, looking to the center of
the triangle and located at a certain distance of T. As
we will use an orthographic projection, the distance
T will not affect the final projection.
To define a virtual camera, a third parameter is
needed: the roll angle usually specified as the “up
vector”. This vector is calculated using its texture
coordinates.
Let (t
1
, t
2
y t
3
) be the texture coordinates of the
three vertices of T (v
1
, v
2
, v
3
). The vertical value on
our two-dimensional space will be assumed to be the
vector (0,1). Having this in mind we can propound
the following equation system:
⎪
⎭
⎪
⎬
⎫
−+−=
−+−=
)·()·(1
)·()·(0
1312
1312
yyyy
xxxx
tttt
tttt
βα
βα
(1)
Working out the values of α and β will let to
calculate the desired vector in the following way:
)·()·(
1312
vvvvUP −+−=
βα
(2)
3.2.2 Projection Matrix
We will use a pseudo-orthogonal projection matrix
to project the vertices of M
HR
. Similar to an
orthogonal matrix, it will not modify the X and Y
coordinates depending on the value of Z. However
its behavior is not exactly the same of a common
orthogonal matrix, as we will explain later.
We need to calculate a projection matrix (P)
which transforms the coordinates of T into its
texture coordinates t, so we propound the following
equations:
}2,1,0{· ∈∀= itvP
ii
(3)
The problem here is that the matrix P is a
homogeneous transform matrix (it has 16 elements),
and thus it can not be solved directly because we
have not enough equations.
As we are looking for a pseudo-orthogonal matrix
which transforms the X and Y coordinates of each
vertex to the texture coordinates, we only need to
calculate the value of the 6 unknowns (P
n
) shown in
figure 3:
⎟
⎟
⎟
⎟
⎟
⎠
⎞
⎜
⎜
⎜
⎜
⎜
⎝
⎛
=
⎟
⎟
⎟
⎟
⎟
⎠
⎞
⎜
⎜
⎜
⎜
⎜
⎝
⎛
⎟
⎟
⎟
⎟
⎟
⎠
⎞
⎜
⎜
⎜
⎜
⎜
⎝
⎛
−
+
−
−
−
1
0
1
1000
2
00
0
0
i
y
i
x
i
z
i
y
i
x
FED
CBA
Nt
Nt
w
w
w
cl
cl
cl
PPP
PPP
Figure 3: Unknowns to solve to calculate the desired
projection matrix.
where i refers to each one of the three vertices of
T, and w
i
refers to those vertices pre-multiplied by
the MV matrix, as shown below:
}3,2,1{· ∈∀= iwvMV
ii
(4)
Nt
x
i
and Nt
y
i
are the normalized device
coordinates for each one of the transformed vertices.
As after perspective division, the visible coordinates
in the screen are situated in the range [-1,1].
Nevertheless, we want them to be in the range [0,1]
of the texture coordinates, then we have to take that
into account. They are calculated using the
following formula:
}3,2,1{1),·(2),( ∈∀−= ittNtNt
i
y
i
x
i
y
i
x
(5)
After solving the equations propounded in
Figure 3 we get the desired pseudo-orthogonal
matrix which projects every vertex of M
HR
in a way
that all the triangles visible through T will be
rendered inside the area formed by the texture
coordinates of T.
T
Texture s
p
ace
v
0
v
2
v
1
t
1
t
2
t
3
GRAPP 2008 - International Conference on Computer Graphics Theory and Applications
64

3.3 Framebuffer
As explained before, the number of renders of M
HR
needed to be performed is equal to the triangle count
of M
LR
. However, we are only interested in the
pixels which are inside the area formed by the
triangle T projected with the matrix MVP. Setting up
the stencil buffer to discard all pixels which are
outside the projection of T, is a very simple way to
discard unwanted pixels and to protect those parts
which have been already rendered.
Finally, the pixel shader re-scales every un-
masked normal to the range [0,1], so that the normal
vector can be encoded as a colour in the RGB space.
3.4 The Auto-occlusion Problem
Sometimes, there are some parts of the models that
will cause this method to fail. This happens when
there is another part of the model between the
camera and the real target surface. This problem is
clearly shown in Figure 4, where a part of the model
is incorrectly occluding the desired surface
(coloured in red), causing the normal map to be
completely invalid.
Figure 4: Auto-occlusion problem: the ear next to the
camera is occluding the real desired geometry.
To solve this problem we have developed a
technique called vertex mirroring. Basically we
consider that if a pixel is going to be drawn more
than once (some parts of the model overlap in screen
space), then the valid pixel will be that one which is
closer to T. This is similar to what raytracing-based
normal map generation algorithms do: if some
polygons intersect the ray, take the one which is
closer to T.
Let Π be the plane containing T. Let N be the
normal of Π, v
i
be each one of the vertices of M
HR
and k
i
be the distance between Π and v
i
. Then the
final position of v
i
is recalculated as follows:
Nkkclampvv
iiii
)·,0,(·2−=
(6)
The function clamp(a,b,c) will trunk the value a
inside the range [b,c]. This ensures that all vertices
of M
HR
are in front of the plane Π, because those
vertex that are behind that plane are mirrored
through it. After performing this step, we can use the
standard depth test to ensure that each rendered pixel
is the nearest possible to T.
This technique can be implemented in a vertex
shader for optimal performance, in a clear, elegant
and efficient way.
3.5 Normal Map Border Expansion
Once the previous process is over, the normal map is
correctly calculated. However, due to the texture
filtering methods used in real-time hardware,
normals could incorrectly interpolate with their
neighbouring “empty” texels. To solve this problem,
we need to create an artificial region surrounding
every part of the normal map.
To detect those texels that do not contain a valid
normal, an extra pass rendering a full screen quad
textured with the previously generated normal map
will be performed. For each pixel, the pixel shader
of the normal map generator will check if the texel
belonging to the pixel being processed has a module
less than 1, which means that it does not contain a
valid normal (because all normal must be unitary). If
that happens, the pixel must be filled with the
average normalized value of its neighbouring texels
which contain a valid normal.
At the end of the process a 1-pixel sized frontier
is created around all parts of the normal map that
didn’t contain a valid normal. This process can be
repeated with the resulting texture to expand the
frontier to a user defined size.
4 RESULTS
All tests were performed on an Athlon64 3500+ /
1GB RAM / GeForce 6800 Ultra and can be divided
into two categories: performance and quality tests.
Table 1 shows a study of total times required to
generate the normal maps for two models with a
different polygonal complexity. For each model
(M
HR
, first column) different coarse approximations
are used (M
LR
, second column) to generate MN. The
column on the right shows the time in milliseconds
needed to calculate the normal map for a certain
combination of meshes.
An octree-based acceleration structure is used to
discard as many triangles as possible in an efficient
way to improve rendering times up to 10 times.
GPU-BASED NORMAL MAP GENERATION
65

Figure 5: Normal maps used in Figure 6. From left to right: the bunny, the monster and the horse.
Table 1: Total times in milliseconds needed to generate
the normal maps for two different models, using a set of
different coarse approximations.
Triangles
M
HR
Triangules
M
LR
Time
(ms)
250 140
500 224
1.000 442
2.000 721
2.500 912
69.451
3.000 1034
250 22
500 32
1.000 66
2.000 102
2.500 131
16.843
3.000 158
On the other hand, some tests have been done to
compare our results with a software based approach,
which is implemented in the nVidia Melody tool.
These results are not shown in a table because that
tool does not display time information. However,
those the times needed for the application to
calculate the normal maps for the same high
resolution model used in our tests vary from 2 to 6
seconds for the worst and better cases, which is
worse compared with our results.
The other studied parameter is how the size of
the normal map affects to our method. As one can
imagine, the bottleneck of our application is the
huge amount of vertices needed to be processed,
because the pixel operations performed are very
light weight. Table 2 shows how our method is
independent of the size of the normal map.
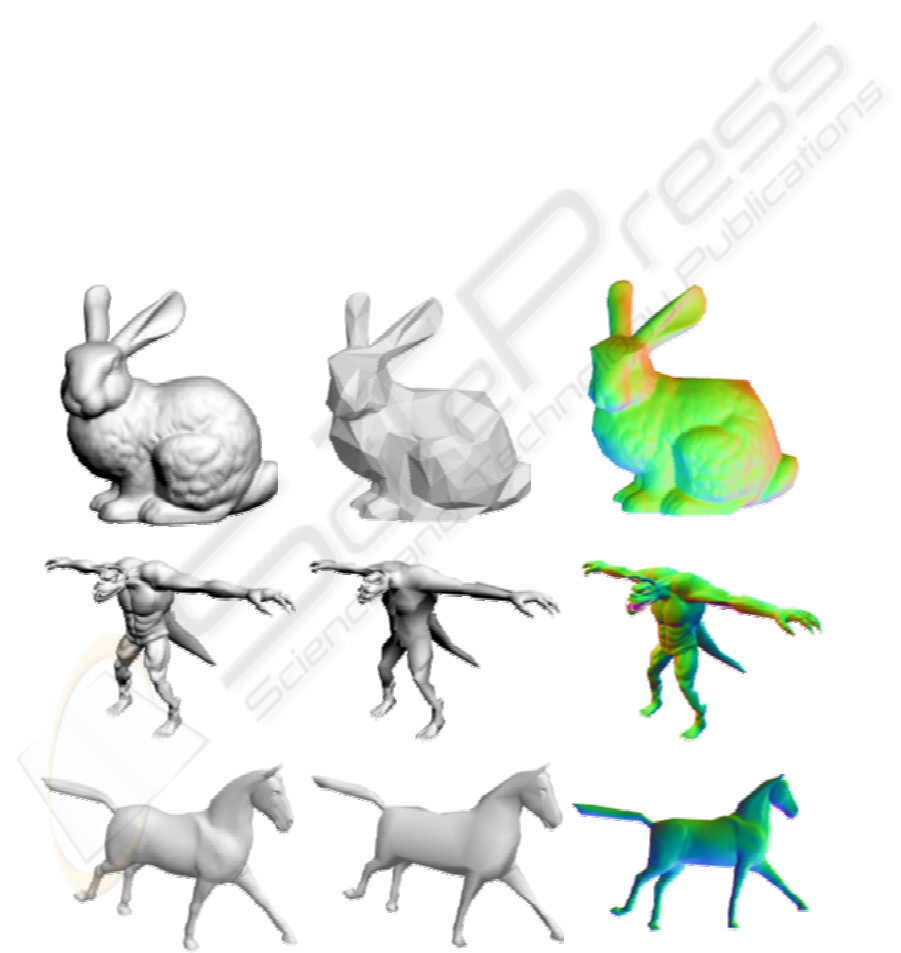
Figure 6 shows the results of the generated
normal maps for 3 different models: the bunny, the
monster and the horse. The column on the left shows
the high resolution models (M
HR
). The column on
the centre shows the coarse versions of each mesh
(M
LR
) used to calculate the normal map. Finally, the
column on the right shows the final normal map
applied to the coarse mesh, so one can check the
final visual quality of the normal map. Figure 5
shows the normal maps generated for its use in
Figure 6.
Table 2: Generation times at different resolutions.
Triangles M
HR
/ M
LR
Resolution Time (ms)
128 x 128 442
512 x 512 441
69.451 / 1.000
1024 x 1024 443
5 CONCLUSIONS
We have presented a GPU-based method for normal
map generation. This method exploits the graphics
hardware in a way that it takes advantage of the
parallelization of the GPU in various ways. On the
one hand, the graphics hardware utilizes several
shading processors in parallel, which is inherent to
the graphics pipeline. On the other hand, there is a
parallelization between the GPU and the CPU,
which is useful to calculate matrices on the CPU
while the GPU is performing each render. Moreover,
the method proposed here does not have some of the
limitations explained in the introduction.
Although this method has been used to calculate
the normals of a high resolution polygonal mesh, it
could also be used to obtain other surface parameters
such as diffuse colour maps, height maps or specular
maps. As seen before, this method is highly
dependent of the number of triangles of both models
(M
HR
and M
LR
). However, this limitation can be
GRAPP 2008 - International Conference on Computer Graphics Theory and Applications
66
reduced by using some kind of hierarchical culling
method to discard most of the unneeded geometry.
In this article we have used octrees as an
acceleration structure. Moreover, reducing the
number of renders needed by grouping triangles of
M
LR
would also be possible. This would highly
accelerate the total generation times, although this
has been left as future work.
ACKNOWLEDGEMENTS
This work has been supported by the Spanish
Ministry of Education and Science (MATER project
TIN2004-07451-C03-03, TIN2005-08863-C03-03),
the European Union (GAMETOOLS project IST-2-
004363), the Jaume I University (PREDOC/2005/12,
PREDOC/2006/54) and FEDER funds.
REFERENCES
Sander, P.V., Zinder, J., Gortler, S.J., Hoppe, H., 2001.
Texture mapping progressive meshes. SIGGRAPH
2001.
Soucy, M., Godin, G., Rioux, M., 1996. A texture-
mapping approach for the compression of colored 3D
triangulations. Visual Computer, 12.
Cignoni, P., Montani, C., Scopigno, R., 1998. A general
method for preserving attribute values on simplified
meshes. Visualizaton’98 proceedings, IEEE.
Wang, Y., Fröhlich, B., Göbel, M., 2002, Fast Normal
Map Generation for simplified meshes. Journal of
Graphics Tools.
Gumbau, J., González, C., Chover, M., Fast GPU-based
normal map generation for simplified models,
WSCG’2006 Posters proceedings.
Cohen, J., Olano, M., Manocha, D. Appearance Preserving
Simplification, SIGGRAPH 98.
Becker, G., Nelson, M. Smooth Transitions between
Bump Rendering Algorithms, SIGGRAPH 93.
NVIDIA, NVIDIA Melody, http://developer.nvidia.com.
Figure 6: The column on the left show the high resolution models (M
HR
). The column in the middle shows the coarse
versions (M
LR
) of those meshes. Finally, the column on the right show the resulting normal map applied to M
L.
GPU-BASED NORMAL MAP GENERATION
67
