
TWO LAYERS ACTION INTEGRATION FOR HRI
Action Integration with Attention Focusing for Interactive Robots
Yasser Mohammad and Toyoaki Nishida
Graduate School of Informatics, Kyoto University, Kyoto, Japan
Keywords:
HRI, Action Selection, Natural Listening.
Abstract:
Behavior architectures are widely used to program interactive robots. In these architectures multiple behaviors
are usually running concurrently so a mechanism for integrating the resulting actuation commands from these
behaviors into actual actuation commands sent to the robot’s motor system must be faced. Different architec-
tures proposed different action integration mechanisms that range from distributed to central integration. In
this paper an analysis of the special requirements that HRI imposes on the action integration system is given.
Based on this analysis a novelle hybrid action integration mechanism that combines distributed attention fo-
cusing with a fast central integration algorithm is presented in the framework of the EICA architecture. The
proposed system was tested in a simulation of a listener robot that aimed to achieve human-like nonverbal
listening behavior in real world interactions. The analysis of the system showed that the proposed mechanism
can generate coherent human-like behavior while being robust against signal correlated noise.
1 INTRODUCTION
Behavioral architectures are widely used to program
interactive robots (Ishiguro et al., 1999), (S Karim,
2006). Behavioral architectures employs a vertical
decomposition of the software design into a set of co-
running behaviors that continuously map the current
state of the environment into commands to the actua-
tors of the robot. A basic problem that must be solved
in any such architecture is how to integrate the results
of multiple running processes into a final command
sent to the actuators of the robot. The proposed solu-
tion to this problem (referred to as the action integra-
tion problem hereafter) can be divided into selective
solutions that selects the action of a single behavior at
any point of time to control the robot and combinative
solutions that generates the final commands based on
the proposed responses of multiple behaviors and hy-
brid solutions that tries to combine cooperation with
coordination. Another dimension of comparison be-
tween action integration solutions is whether or not a
central integrator is employed. According to this di-
mension available solutions are central or distributed.
The action integration mechanism proposed in this
paper can be classified as a hybrid two layered archi-
tecture with distributive attention focusing behavior
level selection followed by a fast central combinative
integrator.
The next section formalizes the requirements for
an action integration mechanism suitable for HRI ap-
plications. Section 3 introduces the L
0
EICA archi-
tecture for which this action integration mechanism
was designed. Section 4 gives the details of the ac-
tion integration mechanism proposed in this paper
and section 5 reports an experiment with a humanoid
robot that used the proposed action integration mech-
anism.The paper is then concluded.
2 REQUIREMENTS
One goal of HRI research is to realize robots that
can use human-like verbal and nonverbal interaction
modalities. To achieve this goal researchers usually
employ behavioral architectures because of their ro-
bustness and fast response. A special property of HRI
applications is that the details of the external behav-
ior of the robot will be interpreted by human users
as intentional signals (Breazeal, 2005), and usually
combining nonverbal messages results on absolutely
different messages. This is why combinative archi-
tectures are not common in HRI research and most
of the HRI specific architectures employ a selective
41
Mohammad Y. and Nishida T. (2008).
TWO LAYERS ACTION INTEGRATION FOR HRI - Action Integration with Attention Focusing for Interactive Robots.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - RA, pages 41-48
DOI: 10.5220/0001482600410048
Copyright
c
SciTePress

integration strategy. For example (Ishiguro et al.,
1999) proposed a robotic architecture based on situ-
ated modules and reactive modules in which reactive
modules represent the purely reactive part of the sys-
tem, and situated modules are higher levels modules
programmed in a high-level language to provide spe-
cific behaviors to the robot. The situated modules are
evaluated serially in an order controlled by the mod-
ule controller. Research in nonverbal communication
in humans reveals a different picture in which mul-
tiple different processes do collaborate to realize the
natural action. For example (Argyle, 2001) showed
that human spatial behavior in close encounters can
be modeled with two interacting processes. It is possi-
ble in the selective framework to implement these two
processes as a single behavior but this goes against
the spirit of behavioral architectures that emphasizes
modularity of behavior (Perez, 2003). This leads to
the first requirement for HRI aware action integra-
tion: The action integration mechanism should allow
a continuous range from pure selective to pure com-
binative strategies. In other words the system should
use a hybrid integration strategy. The need to manage
the degree of combinativity based on the current situ-
ation entails the second requirement: The action inte-
gration mechanism should adapt to the environmental
state using timely sensor information as well as the
internal state of the robot. In current systems this re-
quirement is usually implemented by using a higher
level deliberative layer but in many cases the interac-
tion between simple reactive within the action inte-
grator can achieve the same result as will be shown in
the example implementation of this paper.
The Hybrid Coordination approach presented in
(Perez, 2003) is the nearest approach to achieve this
first requirement. In this system every two behav-
iors are combined using a Hierarchical Hybrid Co-
ordination Node that has two inputs. The output of
the HHCN is calculated as a nonlinear combination
of its two inputs controlled by the activation levels
of the source behaviors and an integer parameter k
that determines how combinative the HHCN is, where
larger values of k makes the node more selective. The
HHCNs are then arranged in a hierarchical structure
to generate the final command for every DoF of the
robot (Perez, 2003). Although experiments with the
navigation of an autonomous underwater robot have
shown that the hybrid coordination architecture can
outperform traditional combinative and selective ar-
chitectures, it still has some limitations in the HRI do-
main. One major limitation of the hybrid coordination
system is its reliance on binary HHCNs which makes
it unsuitable for large numbers of behaviors due to the
exponential growth in the number of HHCNs needed.
Another problem is the choice of the parameter k for
every HHCN. Yet the most difficult problem for this
system is figuring out the correct arrangement of the
behaviors into the HHCN inputs. This leads to the
third requirement: The action integration mechanism
should not depend on global relationships between
behaviors. One of the major problems with this ar-
chitecture is that every behavior must calculate its
own activation level. Although this is easy for be-
haviors like avoid-obstacles or go-to, it is very diffi-
cult for interactive processes like attend-to-human be-
cause the achievement of such interactive processes is
not manifested in an easily measurable specific goal
state that must be achieved or maintained but in the
exact way the overall behavior of the robot is chang-
ing over time. This leads to the fourth requirement:
The action integration mechanism should separate the
calculation of behavior’s influence from the behavior
computation.
The number of behaviors needed in interac-
tive robots usually is very high compared with au-
tonomously navigating robots if the complexity of
each behavior is kept acceptably low, but most of
those behaviors are usually passive in any specific
moment based on the interaction situation. This prop-
erty leads to the fifth requirement: The system should
have a built-in attention focusing mechanism. HRI
systems usually work in the real world with high lev-
els of noise but it is required that the robot shows a
form of goal directed behavior. This leads to the sixth
requirement: The action integration system should be
robust against noise and data loss to provide a goal-
directed behavior.
In summary the six requirements HRI imposes on
the action integration system are:
R1 It should allow a continuous range from pure se-
lective to pure combinative strategies
R2 It should adapt to the environmental state utilizing
timely sensor information.
R3 It should not depend on global relationships be-
tween behaviors
R4 It should separate the calculation of behavior’s in-
fluence from the behavior’s computation
R5 It should have built-in attention focusing
R6 It should be robust against noise and data loss.
Table 2 compares the action integration scheme of
some well used behavioral architectures with the pro-
posed system in terms of the six requirements
In this paper an action integration mechanism that
has the potential of meeting these requirements is pre-
sented.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
42
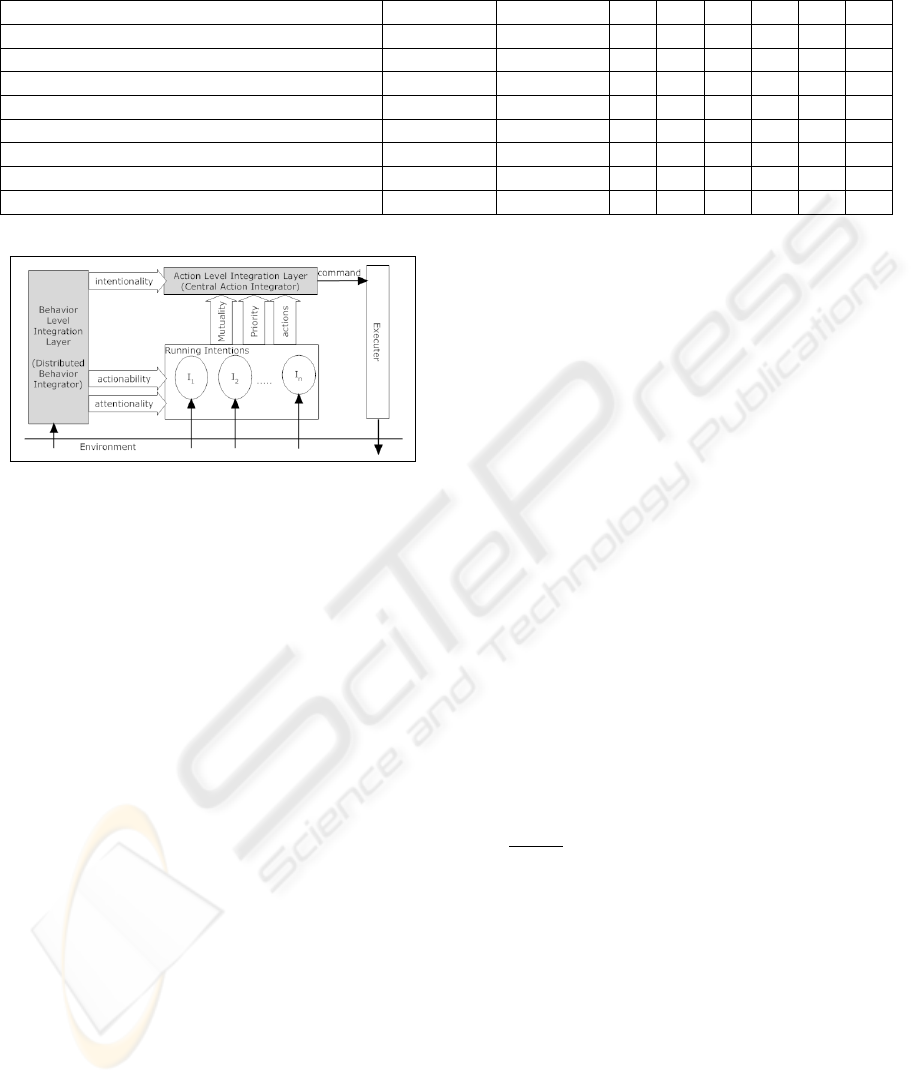
Table 1: Comparison of the Action Integration Capabilities of Some Behavioral Architectures in Terms of the Six Require-
ments in section 2.
Architecture Integration Implement. R1 R2 R3 R4 R5 R6
Subsumption (Brooks, 1986) Selective Distributed
√ √ √
ASD (Maes, 1989) Selective Distributed
√ √
PDL (Steels, 1993) Combinative Central
√
Motor Schemas (Arkin, 1993) Combinative Distributed
√ √
Hybrid Coordination (Perez, 2003) Hybrid Distributed
√ √
AVB (Nicolescu and Matari
´
c, 2002) Selective Distributed
√ √ √
Situated Modules (Ishiguro et al., 1999) Selective Central
√ √ √ √
Proposed System Hybrid Hybrid
√ √ √ √ √ √
Figure 1: The Proposed Action Integration Mechanism.
3 L
0
EICA
EICA is a behavioral hybrid architecture designed for
HRI applications (Mohammad and Nishida, 2007).
The basic behavioral element of EICA is the inten-
tion. Every intention implements a simple well de-
fined reactive capability of the robot. Intentions are
more like motor schema of (Arkin, 1993) than com-
plete behaviors. Every intention has three attributes:
Attentionality a real number (0 1) that specifies the
relative speed at which the intention is running.
Actionability a real number (0 ∞) specifying the ac-
tivation level of the intention. A zero or negative
activation level prevents the intention from execu-
tion. This attribute controls the influence of this
intention on other running components.
Intentionality a real number (0 ∞) set by the dis-
tributed action integration layer and used by the
central integrator to combine the actions of vari-
ous intentions.
4 THE PROPOSED SYSTEM
Fig. 1 shows the block diagram of this hybrid system.
The following subsections will detail the two layers
of the system.
4.1 Behavior Level Integration
The goal of this layer of the action integration mech-
anism is to provide timely values for the actionabil-
ity, attentionality, and intentionality for various inten-
tions in the system. The first two of those parameters
will determine how frequent every intention will be
allowed to send actions to the central action integra-
tor, and the third will be used by the action integrator,
along with other parameters, to integrate the actions
proposed by all the running intentions as will be de-
tailed in the next section.
This layer is implemented as a set of processes
connected together and to the intentions through effect
channels.
Every process runs with a speed directly propor-
tional to its attentionality level as long as its action-
ability is positive. The processes are connected to-
gether through effect channels in a network. Every
effect channel has a set of n inputs that use continu-
ous signaling and a single output that is continuously
calculated from those inputs according to the opera-
tion attribute of the effect channel. The example pre-
sented in this paper uses the Avg operation defined as:
y =
n
∑
i=1
(a
i
x
i
)
n
∑
i=1
(a
i
)
, where x
i
is an input port, a
i
is the ac-
tionability of the object connected to port i and y is
the output of the effect channel. Every process or in-
tention has a single effect channel connected to its at-
tentionality attribute and another effect channel con-
nected to its actionability attribute, and effect chan-
nels can be arranged into hierarchical structures like
the HHCNs in (Perez, 2003) but rather than carrying
action and influence information, the effect channels
carry only the influence information between differ-
ent processes of the system.
TWO LAYERS ACTION INTEGRATION FOR HRI - Action Integration with Attention Focusing for Interactive Robots
43

4.2 Action Level Integration
This layer consists of a central fast action integrator
that fuses the actions generated from various inten-
tions based on the intentionality of their sources, the
mutuality and priority assigned to them, and general
parameters of the robot. The actionability of the ac-
tion integrator is set to a fixed positive value to ensure
that it is always running. The action integrator is an
active entity and this means that its attentionality is
changeable at run time to adjust the responsiveness of
the robot. The action integrator periodically checks its
internal master command object and whenever finds
some action stored in it, the executer is invoked to ex-
ecute this action on the physical actuators of the robot.
Algorithm 1 shows the register-action function re-
sponsible of updating the internal command object
based on actions sent by various intentions of the
robot. The algorithm first ignores any actions gen-
erated from intentions below a specific system wide
threshold τ
act
. The function then calculates the to-
tal priority of the action based on the intentionality
of its source, and its source assigned priority. Based
on the mutuality assigned to every degree of freedom
(DoF) of the action, difference between the total pri-
ority of the proposed action and the currently assigned
priority of the internal command, the system decides
whether to combine the action with the internal com-
mand, override the stored command, or ignore the
proposed action. Intentions can use the immediate at-
tribute of the action object to force the action integra-
tor to issue a command to the executer immediately
after combining the current action.
4.3 Requirement Achievement
1. The system can achieve a continuous range of
combinative to selective behavior based on the
values of the actionability and attentionality of the
intentions and the mutuality assigned to the ac-
tions. On one extreme τ
act
can be set to the same
value of the intention with the highest intention
which will lead to a purely selective behavior. On
the other hand τ
act
and action mutuality can be
set to zero while keeping the intentionality of all
intentions equal which will lead to a purely com-
binative behavior.
2. The distributed layer of the system can use the
sensor information and internal state stored in the
processes to manipulate the tau
act
parameter as
well as the intentionality of various intentions to
control the level of combinative behavior based on
timely information from the environment.
Algorithm 1 : Register Action Algorithm.
function REGISTER-ACTION(Action a, Inten-
tion s)
if s.actionability < τ
act
∨s.intentionality <
τ
int
then
exit
end if
c ← current combined command
p ← a.priority + max priority ×
s.intentionality
for every DoF i in the a do
combined ← true
if p < c.priority ∧s 6= c.source then
c.source ← s
c.do f (i) ← a.do f (i)
c.priority(i) ← p
c.hasAction(i) ← true
end if
if c.source 6= null then
c.source ← null
c.priority(i) ←max (p, c. priority (i))
else
c.source ← s
c.priority(i) ← p
end if
if a.mutual = true ∨c.source = s then
c.source ← s
c.do f (i) ← a.do f (i)
c.priority(i) ← p
else
c.do f (i) ←
p×a.do f (i)+c.priority×c.do f (i)
p+c.priority
end if
if combined = true then
return false
end if
c.actionable ←true
if a.notCombinableWithLower then
c.stopCombiningLower ←true
end if
if a.immediate then
execute a
end if
end for
end function
3. The proposed action integration mechanism does
not depend on any global relation between the
intentions or the processes and adding new pro-
cesses or intentions will only involve deciding the
local effect, and data channels related to this new
active component.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
44

4. The influence of any intention on the final behav-
ior of the robot is controlled based on its intention-
ality which is in turn controlled by the processes
of the behavior integration layer rather than the
intention itself. This provides the required sep-
aration between the calculation of influence and
the computation of the basic behaviors.
5. Attention focusing is implemented in the lowest
level of implementation in the proposed system
and is controlled by the attentionality of various
processes and intentions. This calculation is sepa-
rated from the influence calculation through the
actionability parameters. Most existing robotic
architectures do not separate these two aspects of
behavior control. By separating the actionability
from the attentionality and allowing actionabil-
ity to have a continuous range, EICA enables a
form of attention focusing that is usually unavail-
able to behavioral systems. This separation allows
the robot to select the active processes depending
on the general context (by setting the actionability
value) while still being able to assign the compu-
tation power according to the exact environmental
and internal condition (by setting the attentional-
ity value). The fact that the actionability is vari-
able allows the system to use it to change the pos-
sible influence of various processes (through the
operators of the effect channels) based on the cur-
rent situation.
6. The central action integrator acts as a low pass fil-
ter that reduces the effects of noise by combining
the actions sent by various intentions and accumu-
lating them for a period that is controlled by the
attentionality of the action integrator itself. This
provides a simple means of noise rejection. A
more subtle advantage of the proposed system in
relation to goal-directed behavior is the distribu-
tive nature of the behavior integration layer which
allows, for well designed robots, the emergence
of complex external behavior from simple internal
processes. The other option to achieve this com-
plex external behavior was to map this complexity
directly to the intentions themselves which would
have complicated the design too much.
4.4 Limitations
Although the previous subsection has shown that the
proposed architecture can theoretically achieve the six
requirement of section 2 the system still has some lim-
itations. One of the major problems with the proposed
system is that it is sometimes difficult design the
behavior level integration layer because of its asyn-
chronous distributed nature and it is also difficult to
learn the parameters needed to control the timing of
the operation of various processes in it. Although
careful division of the task into a set of intentions
and task-specific integration processes can alleviate
this problem, a general guideline to this process is
needed to simplify the design of EICA robots. This
limitation can be overcame by restricting the number
of processes active at any moment to only one process
but this will lead to over-complication in the design of
the intentions. A better solution to this problem is a
direction for future research.
5 EXPERIMENT
The ability to use human-like nonverbal listening be-
havior is an advantage for humanoid robots that coex-
ist with humans in the same social space and is com-
plex enough to test some of the proposed system’s
features. (Kanda et al., 2007) implemented a robot
that tries to use natural human like body language
while listening to a human giving it road directions
based on the situated modules architecture. The road
guidance task is simplified by the fact that there are
no other objects of interest in the scene except the hu-
man. In this work we try to build a general listener
robot that can generate natural nonverbal behavior in
an explanation scenario involving unknown number
of objects that can also be moving. As a minimal de-
sign, only the head of the robot was controlled during
this experiment. This decision was based on the hy-
pothesis accepted by many researchers in the nonver-
bal human interaction community that gaze direction
is one of the most important nonverbal behaviors in-
volved in realizing natural listening in human-human
close encounters (Argyle, 2001). This example is in-
tended as a guide for designing systems that can uti-
lize the proposed integration strategy and a proof of
its applicability for HRI.
5.1 Procedure
The evaluation data was collected as follows:
1. Six different explanation scenarios were collected
in which a person is explaining the procedure
of operating a hypothetical machine that involves
pressing three different buttons, rotating a knob,
and noticing results in an LCD screen in front
of a Robovie II robot while pretending that the
robot is listening to the explanation. The data was
collected using the PhaseSpace Motion Digitizer
system (PhaseSpace, 2007) by utilizing 18 LED
markers attached to various parts of the speaker’s
body. The data was logged 460 times per second.
TWO LAYERS ACTION INTEGRATION FOR HRI - Action Integration with Attention Focusing for Interactive Robots
45
2. The logged data were used as the input to a robot
simulator that implemented the proposed system.
The behavior of the robot’s head was compared
with known human-human behavior in terms of
mutual gaze and gaze toward instructor.
3. For every scenario 20 new synthetic scenarios
were generated by utilizing 20 different levels of
noise. The error level is defined as the percentage
of the mean value of the noise term to the mean of
the raw signal. The behavior of the simulator was
analyzed for every one of the resulting 120 sce-
narios and compared to the original performance.
5.2 Design
Four reactive intentions were designed that encapsu-
late the possible interaction actions that the robot can
generate, namely, looking around , following the hu-
man face , following the salient object in the envi-
ronment, and looking at the same place the human
is looking at. Each one of those intention is imple-
mented as a simple state machine (Mohammad et al.,
2007). The sufficiency of those intentions was based
on the fact that in the current scenario the robot sim-
ply has no other place to look, and the necessity was
confirmed empirically by the fact that the three be-
havioral processes needed to adjust the intentionality
of all of these intentions.
The analysis of natural listening requirements
showed the need of three behavioral processes. Two
processes to generate an approach-escape mechanism
controlling looking toward the human operator which
is inspired by the Approach-Avoidance mechanism
suggested in (Argyle, 2001) in managing spatial dis-
tance in natural human-human situations. These pro-
cesses were named Look-At-Human, and Be-Polite.
A third process was needed to control the realization
of the mutual attention behavior. This process was
called Mutual-Intention. The details refer to (Moham-
mad et al., 2007). A brief description of them is given
here:
1. Look-At-Human: This process is responsible of
generating an attractive virtual force that pulls the
robot’s head to the location of the human face.
2. Be-Polite: This process works against the Look-
At-Human process generating a repulsive virtual
force that pulls the robot’s head away from the lo-
cation of the human face depending on the period
of attending to the human.
3. Mutual-Attention: This process tries to pull the
robot’s head toward direction to which the human
is looking.
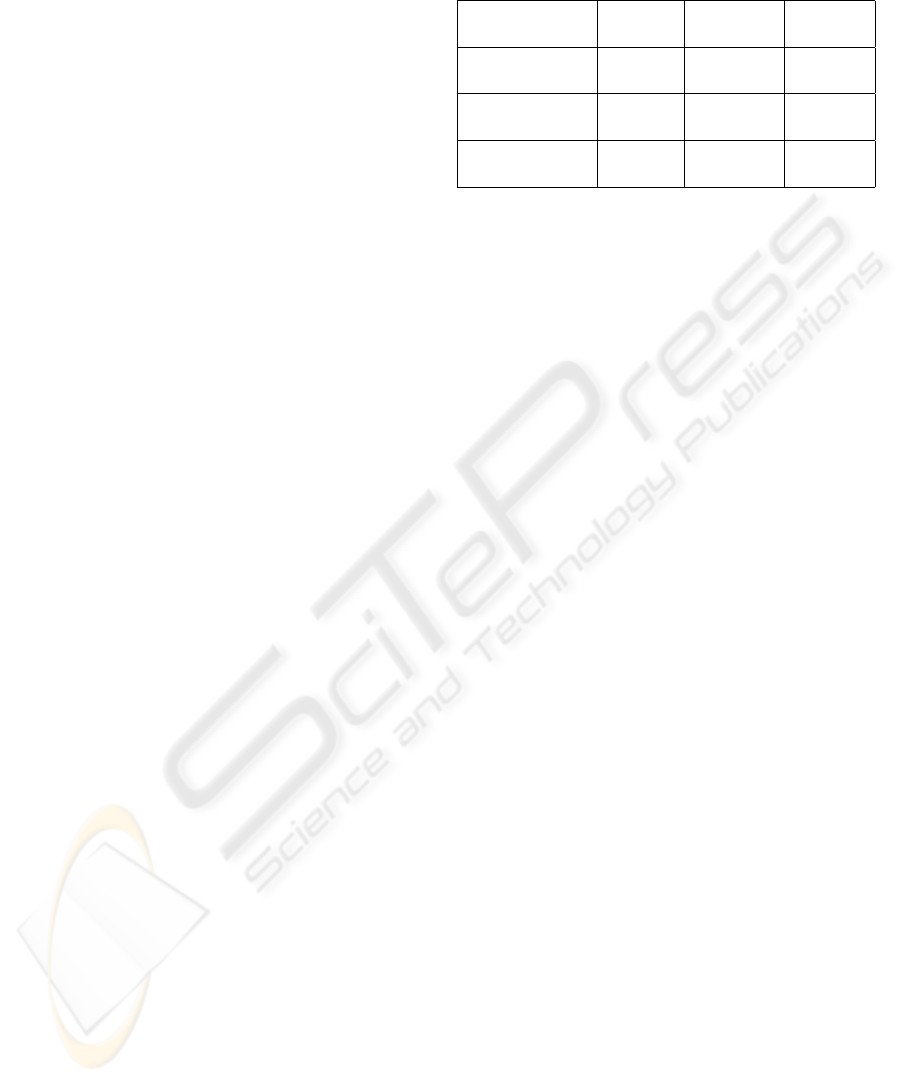
Table 2: Comparison between the Simulated and Natural
Behavior.
Item Statistic Simulation H-H
value
Mutual Gaze Mean 31.5% 30%
Std.Dev. 1.94% –
Gaze Toward Mean 77.87% 75%
Instructor Std.Dev. 3.04% –
Mutual Mean 53.12% unknown
Attention Std.Dev. 4.66% –
Five perception processes were needed to imple-
ment the aforementioned behavioral processes and in-
tentions. The details can be found in (Mohammad
et al., 2007).
5.3 Results
Some of the results of numerical simulations of the
listening behavior of the robot are given in Table 2.
The table shows the average time of performing two
basic interactive behaviors obtained from the simu-
lated robot in comparison to the known average val-
ues measured in human-human interaction situations.
The average times in the human-human case are re-
ported from (Argyle, 2001). As the table shows the
behavior of the robot is similar to the known aver-
age behavior in the human-human case for both mu-
tual gaze and gaze toward instructor behaviors and
the standard deviation in both cases is less than 7%
of the mean value which predicts robust operation in
real world situations.
Although the average time of showing the three
evaluation behaviors are similar to the human-human
values as shown in Table 2, this similarity is not
enough for completely judging human like natural be-
havior and the dynamical aspects of the interaction
must be taken into account before drawing final con-
clusions. This method of analysis, although limited,
was selected because of two reasons. First the be-
havior of the speaker in this experiment is not to-
tally natural because the robot did not respond at real
time, which affects the dynamics of the interaction
but it was hypothesized that the effect on the aver-
ages used for evaluation is much less. Second there is
no available data about the detailed dynamics of the
behavior of the listener and the speaker in the human-
human case during explanation scenarios. In near fu-
ture a wide scale human-human experiment will be
conducted by the authors to collect such data for more
accurate evaluation.
Fig. 2 shows the effect of increasing the error level
on the percentage of time mutual gaze and gaze to-
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
46
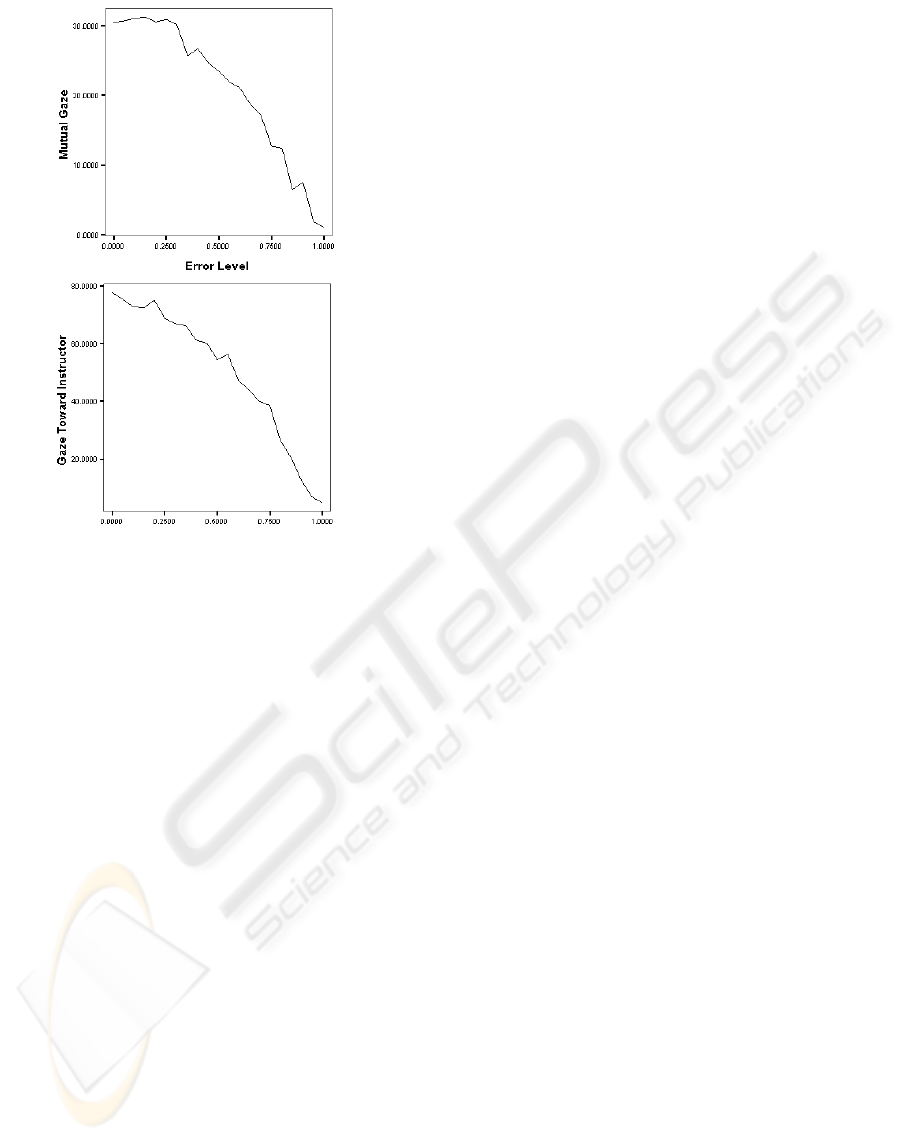
Figure 2: Effect on the error level on the behavior of the
robot.
ward instructor behaviors were recognized in the sim-
ulation. As expected the amount of time spent on
these interactive behaviors decreases with increased
error level although this decrease is not linear but
can be well approximated with a quadratic function
as regression analysis revealed. This means that the
performance degrades gracefully with the increased
noise level even for signal correlated noise.
5.4 Discussion
One of the main purposes of having robotic architec-
tures is to make it easier for the programmer to divide
the required task into smaller computational compo-
nents that can be implemented directly. The pro-
posed action integration mechanism helps in achiev-
ing a natural division of the problem by the following
simple procedure. First the task is analyzed to find the
basic competencies that the robot must possess in or-
der to achieve this task. Those competencies are not
complex behaviors like attend-to-human but finer be-
haviors like look-right, follow-face, etc. Those com-
petencies are then mapped to the intentions of the sys-
tem. Each one of these intentions should be carefully
engineered and tested before adding any more com-
ponents to the system
The next step in the design process is to design
the behavior level integration part of the action inte-
gration. To do that, the task is analyzed to find the
underlying processes that control the required behav-
ior. Those processes are then implemented. The most
difficult part of the whole process is to find the correct
parameters of those processes to achieve the required
external behavior. Currently this parameter choice is
done using trial-and-error but it will be more effective
to use machine learning techniques to learn those pa-
rameters from the interactions either offline or online.
The current architecture supports run-time adaptation
of those parameters, and this feature will be exploited
in the future to implement learning of the behavioral
integration layer. Those behavioral steps are added
incrementally and the relative timing between them is
adjusted according to the required behavior.
This simple design procedure is made possible be-
cause of the separation between the basic behavioral
components (intentions) and the behavior level inte-
gration layer (processes).
It is informative to compare this procedure with
the procedure suggested in (Ishiguro et al., 1999)
for the situated modules architecture. Every situ-
ated module should have a list of preconditions that
is always checked by the module controller which
chooses that module that is most suitable to the sit-
uation. The problem with this arrangement for HRI
applications is that the evaluation of the preconditions
can be very time consuming or even very difficult to
decide in the first place. Let’s consider the situated
module look-at-human that should be activated dur-
ing the interaction enough to make the speaker feel
comfortable but not too much. How can the designer
find all the rule to select all the occasions in which
the behavior is to be invoked? and how can this list
be updated for reuse in other applications? The main
problem is that it is too difficult to find the precondi-
tions for a behavior as simple as look-at-human and
the only solutions are either to complicate the behav-
iors used (increase the granularity) or to complicate
the module controller (may be by using deliberation).
In the proposed system this problem does not exist be-
cause the behavior itself (the intention) is coded with-
out any need to think about its preconditions. The be-
havior level integration processes are then designed
based on the global view of the task and not the re-
quirements of each intention which means that this
set of preconditions need not be built at any point in
the design process. This allows intentions to be thin-
ner than the situated modules without the need of a
higher deliberative layer.
A widely accepted definition of intention is:
”a choice with commitment” (Cohen and Levesque,
TWO LAYERS ACTION INTEGRATION FOR HRI - Action Integration with Attention Focusing for Interactive Robots
47
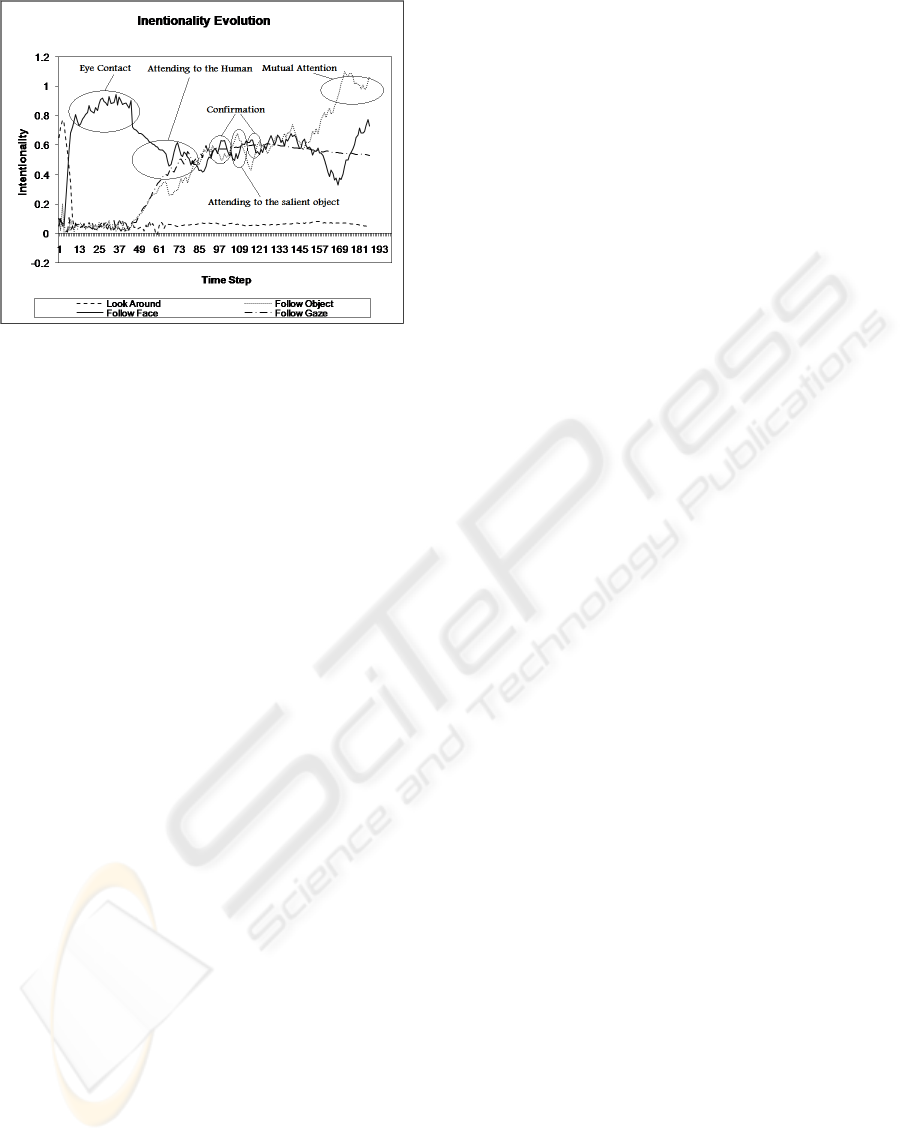
Figure 3: The evolution of intentionality of the four basic
intention used in the listener robot.
1990). This definition emphasizes that for a behavior
to be perceived as intentional it must possess a form
of behavioral inertia that makes the robot stick with
its behavior until its goal is achieved or the situational
changes result on the adoption of a new goal. Care-
ful design of the behavior level integration processes
can achieve this goal in the proposed architecture. For
example Fig. 3 shows the evolution of intentionality
of the aforementioned four basic reactive intentions
in one case annotated with the external behavior as
perceived by the interacting human. As shown in the
figure the effects of the fluctuations of the input sig-
nals ,although mapped to the intentionality of various
intentions, do not affect the final behavior directly be-
cause of the existence of the central action level in-
tegrator that averages those fluctuations and provides
this needed behavioral inertia to make the final be-
havior look intentional for the human.
6 CONCLUSIONS
This paper analyzed the required properties for ac-
tion integration mechanisms suitable for interactive
robots, and presented the design of a new two lay-
ers hybrid action integration mechanism that utilizes
both distributive integration in the behavior integra-
tion layer and a central action level integrator that can
achieve the aforementioned requirement. The paper
also presented a simple example of a listener robot
implemented based on the proposed mechanism.
REFERENCES
Argyle, M. (2001). Bodily Communication. Routledge;
New Ed edition.
Arkin, R. C. (1993). Biological neural networks in inver-
tebrate neuroethology and robotics, chapter Modeling
neural function at the schema level: Implications and
results for robotic control, page 17. Academic Press.
Breazeal, C. Kidd, C. T. A. H. G. B. M. (2005). Effects
of nonverbal communication on efficiency and robust-
ness in human-robot teamwork. In 2005 IEEE/RSJ In-
ternational Conference on Intelligent Robots and Sys-
tems, 2005. (IROS 2005), pages 708–713.
Brooks, R. A. (1986). A robust layered control system for a
mobile robot. IEEE Journal of Robotics and Automa-
tion, 2(1):14–23.
Cohen, P. and Levesque, H. (1990). Intention is choice with
commitment. Artificial Intelligence, 42:213–261.
Ishiguro, H., Kanda, T., Kimoto, K., and Ishida, T. (1999).
A robot architecture based on situated modules. In
IEEE/RSJ Conference on Intelligent Robots and Sys-
tems 1999 (IROS 1999), volume 3, pages 1617–1624.
IEEE.
Kanda, T., Kamasima, M., Imai, M., Ono, T., Sakamoto,
D., Ishiguro, H., and Anzai, Y. (2007). A humanoid
robot that pretends to listen to route guidance from a
human. Autonomous Robots, 22(1):87–100.
Maes, P. (1989). How to do the right thing. Connection
Science, 1(3):291–323.
Mohammad, Y. F. O. and Nishida, T. (2007). A new, hri
inspired, view of intention. In AAAI-07 Workshop
on Human Implications of Human-Robot Interactions,
pages 21–27.
Mohammad, Y. F. O., Ohya, T., Hiramatsu, T., Sumi, Y., and
Nishida, T. (2007). Embodiment of knowledge into
the interaction and physical domains using robots. In
International Conference on Control, Automation and
Systems, pages 737–744.
Nicolescu, M. N. and Matari
´
c, M. J. (2002). A hierar-
chical architecture for behavior-based robots. In AA-
MAS ’02: Proceedings of the first international joint
conference on Autonomous agents and multiagent sys-
tems, pages 227–233, New York, NY, USA. ACM.
Perez, M. C. (2003). A Proposal of a Behavior-based Con-
trol Architecture with Reinforcement Learning for an
Autonomous Underwater Robot. PhD thesis, Univer-
sity of Girona.
PhaseSpace (2007). http://www.phasespace.com/.
S Karim, L Sonenberg, A. T. (2006). A hybrid architecture
combining reactive plan execution and reactive learn-
ing. In 9th Biennial Pacific Rim International Confer-
ence on Artificial Intelligence (PRICAI).
Steels, L. (1993). The artifcial route to artifcial intel-
ligence. Building situated embodied agents, chapter
Building agents with autonomous behaviour systems.
Lawrence Erlbaum Associates, New Haven.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
48
