
LegOSC
Mindstorms NXT Robotics Programming for Artists
Jorge Cardoso
Research Centre for Science and Technology in Art (CITAR), Portuguese Catholic University
Rua Diogo Botelho 1327, 4169-005 Porto, Portugal
Manuel Ferreira, Cristina Santos
Department of Industrial Electronics, University of Minho, Campus de Azurem – Guimar˜aes, Portugal
Keywords:
Robots, Art, Lego Mindstorms, OSC.
Abstract:
Robotics is an interesting but difficult area for digital artists who generally don’t have much academic back-
ground on electronics or computer programming. Digital art students normally use high-level application to
program their visual and sonorous installations. This paper presents LegOSC - a tool that allows the control of
the Mindstorms NXT robots from any application that uses the Open Sound Control protocol which is imple-
mented by most of those high-level applications. This allows artists to create works which incorporate robotic
parts using the familiar programming environment.
1 INTRODUCTION
Robotics are becoming increasingly interesting for
artists in many areas, e.g., painting (Moura and
Pereira, 2004), theater (Ullanta, 2007), sculp-
ture (Pisaturo, 2007), installation (da Costa, 2007),
music (f18institute, 2007). More and more, art work
incorporates some electro-mechanic parts which pro-
vide more ways for the artist to express himself, or to
complement his ability to do so.
However, using robotic systems still requires
some expertise that most artists don’t possess. Even
in digital art degrees, robotics is usually not a subject.
Art students generally lack the necessary background
in electronics.
Altough there are now some simple tools to build
and program robotic systems (of which, perhaps, the
most widely known is the Lego Mindstorms (Lego
Group, 2007)) and many uses in classrooms (Fa-
gin, 2003; Klassner and Anderson, 2003; Bruder and
Wedeward, 2003; Ceccarelli, 2003), these can still be
difficult to integrate in an art work.
As an example, students in the author’s school
usually use platforms like Processing (Fry and
Reas, 2007), Eyesweb (Camurri et al., 2000),
Adobe Flash (Adobe, 2007b), Adobe Direc-
tor (Adobe, 2007a), Max/MSP (Cycling74, 2007),
Pure Data (Puckette, 1996), to implement their visual
and sonorous installations. These platforms can (and
usually are) be interconnected using MIDI mes-
sages http://www.midi.org, or Open Sound Control
(OSC) (Wright and Freed, 1997) messages.
In order to provide an easier setting for the use of
a robotic system that can be controlled by a platform
like the ones listed above, LegOSC has been imple-
mented – an Open Sound Control gateway application
to control the Lego Mindstorms NXT robotic system.
The rest of this paper is organized as follows: sec-
tion 2 introduces the Lego Mindstorms NXT system;
section 3 describes the Open Sound Control protocol;
section 4 presents the arquitecture and usage of the
LegOSC application; section 5 describes some usages
of LegOSC; section 6 describes some of the limita-
tions of LegOSC; finnaly, section 7 concludes.
2 MINDSTORMS NXT
The Lego Mindstorms NXT system consists of three
main component types: the NXT brick; motors and
sensors and assorted Lego bricks.
The NXT brick has a 32-bit ARM7 microcon-
troller, 256 Kbytes FLASH, 64 Kbytes RAM. It has
Bluetooth wireless communication (Bluetooth Class
II V2.0 compliant) a USB full speed port (12 Mbit/s),
177
Cardoso J., Ferreira M. and Santos C. (2008).
LegOSC - Mindstorms NXT Robotics Programming for Artists.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - RA, pages 177-182
DOI: 10.5220/0001485201770182
Copyright
c
SciTePress

Figure 1: Hardware block diagram for the NXT brick, from
(Lego Group, 2006b).
4 input ports, 3 output ports, 100 x 64 pixel LCD
graphical display and a loudspeaker - 8 kHz sound
quality. Figure 1 shows the block diagram of the NXT
brick.
Three servo-motors can be connected to the three
output ports and sensors (light, ultrasonic, pressure,
sound, etc) to the four input ports.
The rest of the Lego bricks allow the construction
of various shaped and sized robots.
The Mindstorms NXT robots can be controlled by
uploading a program to the NXT brick and have it run
in an autonomous fashion. These programs can be
written using the Mindstorms NXT visual program-
ming software. In alternative, one can use other lan-
guages with sintaxes close to C, such as “Not eXactly
C” http://bricxcc.sourceforge.net/nbc or with Java
sintaxes such as “LeJos”http://lejos.sourceforge.net,
although some may require changing the NXT
firmware.
The robot can also be controlled wirelessly by us-
ing the Bluetooth Direct Commands protocol (Lego
Group, 2006a). This protocol allows sending instruc-
tions to actuate the motors or read sensors without
the need to previously upload a program to the NXT
brick. It also provides a way to interface the robot
with other programs that understand this bluetooth
protocol.
2.1 Bluetooth Protocol
Figure 2 shows the block diagram for the communi-
cation between a PC and Lego NXT.
Communication can be accomplished by using an
USB cable connecting the PC and the NXT or wire-
lessly by using bluetooth.
Figure 2: Communication block diagram, from (Lego
Group, 2006a).
The protocol can be used to (based on (Lego
Group, 2006a)):
1. Read, write and delete files.
2. Direct communication with the NXT system to:
• Send direct commands to the virtual machine.
• Send message commands to program mail-
boxes.
• Get file list within NXT.
The bluetooth protocol package is shown on Fig-
ure 3.
Bytes 0 and 1 are the LSB and MSB bytes, respec-
tively, of the length of the command data.
Byte 2 is the command type. The 7 least significant
bits identify the command type and the most sig-
nificant bit (bit 7) determines if the command re-
quires a reply from the NXT, or not. The com-
mand type can by one of the following:
•
0x00
: Direct command, reply required.
•
0x01
: System command, reply required.
•
0x02
: Reply command.
•
0x80
: Direct command, reply not required.
•
0x81
: System command, reply not required.
Byte 3 identifies the command.
Byte 4-N are the command specific data.
LegOSC uses only the Direct Commands subpro-
tocol to communicate with the NXT.
Figure 3: Bluetooth Protocol package.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
178

3 OPEN SOUND CONTROL
The Open Sound Control is an application level
communication protocol. It was meant to replace
MIDI but, although it was not successfull at that, it
has become a widely used protocol in sound syn-
thesis and video processing applications and many
general purpose programming environments (see
http://www.cnmat.berkeley.edu/OpenSoundControl/
for a more comprehensive list).
OSC is a simple message based, transport-
independent protocol, although most of its implemen-
tations use UDP or TCP as the transport layer. OSC
messages have an address and a variable number of
typed arguments. OSC standard types include 32-
bit integers and floats, strings, blobs and 64-bit fixed
point timetags.
An OSC Message consists of the following parts:
Address Pattern Type Tag Arg 0 ... Arg n
The OSC Address Pattern is an OSC String
1
that
starts with the ’/’ character. The OSC Address Pat-
tern is pattern-matched by the receivers to decide if a
message should be delivered.
The Type Tag is also an OSC String in which each
character represents the type of an OSC Argument in
the message.
Each OSC Message may have a variable number
of binary represented arguments. Each argument rep-
resentation is padded with zeroes to make it a multiple
of 4.
4 LegOSC
LegOSC is a gateway application that translates a
set of pre-defined OSC messages into Bluetooth Di-
rect Commands for the NXT brick, and vice-versa, as
shown in Figure 4.
To configure LegOSC we need to define the lo-
cal UDP port on which it will listen for OSC mes-
sages, the IP address and port of the OSC Application
that will be communicating with LegOSC (and listen-
ing for OSC messages) and the virtual COM port on
which the NXT Brick was connected.
Figure 5 shows a screenshot of the LegOSC appli-
cation.
LegOSC will listen for OSC messages that tell it to
actuate the motors or to read sensor values. In case of
the latter, it will respond with another OSC message
with the sensor value. For some applications however,
1
An OSC String is null-terminated string of ASCII char-
acteres, padded with nulls to make the total number of char-
acters a multiple of 4.
Figure 4: Communication between the NXT brick, LegOSC
and the OSC Application.
Figure 5: LegOSC Application.
reading sensors will be a continous operation so, in
order to save some OSC traffic, LegOSC can be pro-
grammed to continously send sensor values without
beeing asked for. The user can tell LegOSC that auto-
matic readings are required and how often a reading
should be made.
In order to be able to read a sensor (automatically),
LegOSC must know the type of sensor connected to
each port in the NXT brick. The user can tell LegOSC
the type of sensor using the Sensor Configuration tab
(Figure 6).
Figure 6: Configuring automatic sensor reading.
LegOSC - Mindstorms NXT Robotics Programming for Artists
179
4.1 OSC Messages
The list of currently implemented OSC messages that
LegOSC understands is:
• /motorForward ii – The first integer argument is
the motor number and the second is the power
to apply to the motor. This message will make
the specified motor start to rotate at the specified
power.
• /motorSlowStop i – The integer argument is the
motor number. This message stops the specified
motor without aplying “brakes”.
• /motorBrake i – The integer argument is the motor
number. This message stops the specified motor
and aplies “brakes”.
• /resetMotor i – The integer argument is the motor
number. This message resets the tachometer of
the specified motor.
• /getMotorTachoCount i – The integer argument is
the motor number. This message asks for the cur-
rent tacho count of the specified motor and origi-
nates a /motorTachoCount message as the reply.
• /getButtonState i – The integer argument is the
port to which the pressure sensor is attached. This
message asks for the current state of the pressure
sensor and originates a /buttonState message as
the reply.
• /getLightLeveli – The integer argument is the port
to which the light sensor is attached. This mes-
sage asks for the current value of the light sensor
and originates a /lightLevel message as the reply.
• /getSoundLevel i – The integer argument is the
port to which the sound sensor is attached. This
message asks for the current value of the sound
sensor and originates a /soundLevel message as
the reply.
• /getProximityLevel i – The integer argument is
the port to which the ultrasonic sensor is attached.
This message asks for the current value of the ul-
trasonic sensor and originates a /proximityLevel
message as the reply.
• /getBatteryLevel – This message asks for the cur-
rent voltage of the battery of the NXT.
Some of the above messages generate a response:
• /motorTachoCount ii – Response to /getMotorTa-
choCount. The first integer argument is the motor
number; the second integer argument is the cur-
rent tacho count for that motor.
• /buttonState ii – Response to /getButtonState. The
first integer argument is the port number to which
the pressure sensor is attached; the second integer
argument if the current state of the pressure sensor
(0 – not pressed; 1 – pressed).
• /lightLevel ii – Response to /getLightLevel. The
first integer argument is the port number to which
the light sensor is attached; the second integer ar-
gument if the current value of light sensor.
• /soundLevel ii – Response to /getSoundLevel.
The first integer argument is the port number to
which the sound sensor is attached; the second in-
teger argument if the current value of sound sen-
sor.
• /proximityLevel ii – Response to /getProxim-
ityLevel. The first integer argument is the port
number to which the ultrasonic sensor is attached;
the second integer argument if the current value of
ultrasonic sensor.
• /batteryLevel i – Response to /getBatteryLevel.
The integer argument is the current voltage in mil-
livolts.
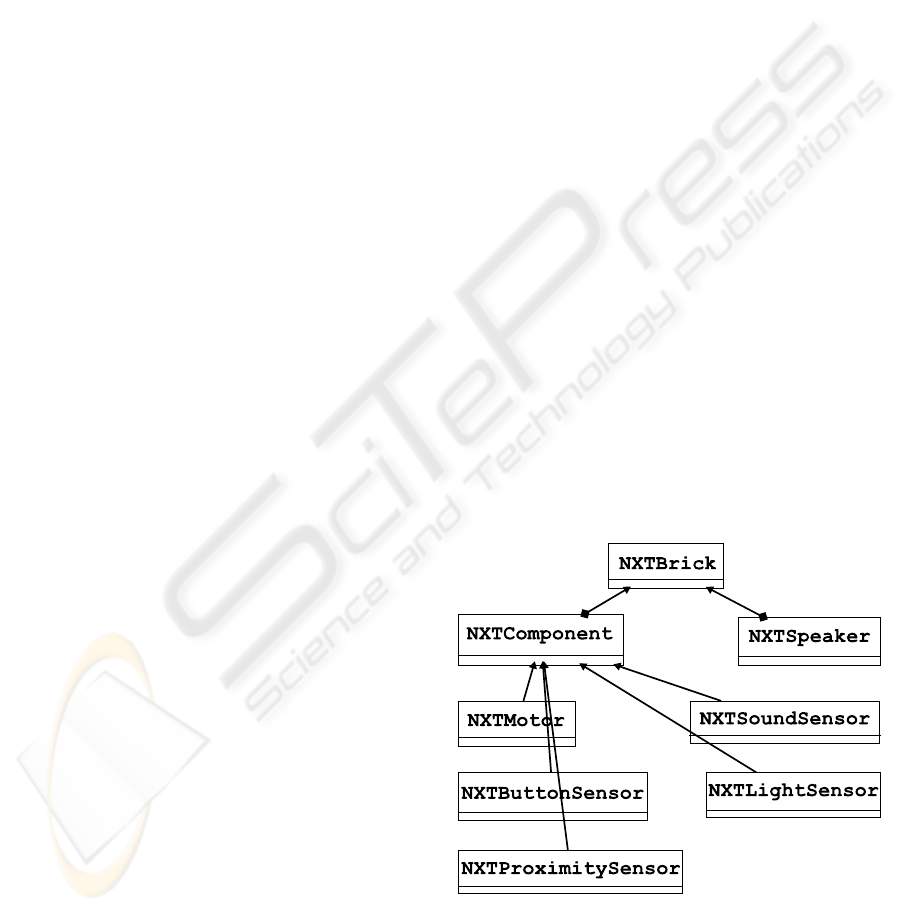
4.2 Java Libraries
LegOSC was written using the Java programminglan-
guage and as a by-product of developing this gateway
we developed a Java library that implements the NXT
Bluetooth low-level commands as well as a higher
level library that abstracts these low-level commands
into higher level NXT-related objects. The class dia-
gram is shown on Figure 7 (details of each class are
hidden to save space).
Figure 7: High-level Java library class diagram.
Since we had to developthis Java library and since
the modifications were small, we decided to adapt
the Java library to a Processing library. Processing
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
180

is a tool/programming languaged widely used in dig-
ital arts, so it made sense to allow direct control of
the NXT without the need to use a different program.
Processing libraries are usually composed of a single
class to simplify its usage as much as possible. The
(single) class diagram for this library is shown on Fig-
ure 8.
Figure 8: Processing library class diagram.
5 EXAMPLE USAGES
To give a better idea on how LegOSC can be used,
a brief description of some typical exercises and im-
plementations that students are asked to do is given
next.
The first one is a non-classic way of controlling
a robot. Instead of using a mouse/joystick/keyboard,
students are asked to think of a way to control a robot
using sound. Figure 9 shows an implementation using
Pure Data – an audio synthesis platform. In this ex-
ample, a stereo microphone is used to control two mo-
tors. The sound level at each channel drives its own
motor, thus enabling the user to direct the robot by
making sound lauder at one microphone or the other.
The second example deals with mapping some
physical parameter of the robot, e.g., distance to a
wall, light level reading, into another type of signal.
In this example (Figure 10) a simple Theremin was
implemented. Readings from the proximity sensor
and from the light sensor are used to drive two audio
oscillators that together generate a frequency mod-
ulated audio signal. In this case the movement of
the robot (which could be programmed in a diferente
number of ways) generates an audio signal.
Figure 9: Pure Data implementation of a sound controlled
robot.
Figure 10: Pure Data implementation of a robot theremin.
Both examples were implemented in Pure Data
and the figures showthe complete program. Pure Data
is and audio synthesis and manipulation platform so it
simplifies the kind of programming needed to imple-
ment the examples.
LegOSC - Mindstorms NXT Robotics Programming for Artists
181

6 LIMITATIONS
LegOSC was developed with an education and artis-
tic purposes in mind. It is not intended for precision
robotics.
The understood messages were kept as simple as
possible in order to allow basic control of the robots
but not to overwhelm the student/artist with detail.
The bluetooth communication latency may also
make it unsuitable for some applications where a
rapid response to an event is required.
7 CONCLUSIONS AND FUTURE
WORK
We have developed an Open Sound Control gateway
application for controlling the Lego Mindstorms NXT
robotics system. This application is intended to be
used by digital art students as a simple way to control
and integrate robotic art work with other often used
systems to develop visual and sonorous installations.
We hope it will allow an easier first approach to
teaching and using robotics in the digital arts area.
LegOSC is currently being used by the author’s
students and we hope to enhance it with the experi-
ence gained with its usage.
One of the improvements that we have already
gathered from experiences is the ability to control sev-
eral NXT using the same LegOSC instance. This will
facilitate the programming of applications that make
use of several robots at the same time.
The tool is freely available for download
at http://diablu.googlecode.com/svn/trunk/LegOSC/.
The Processing library is also available from the Pro-
cessing site at http://processing.org.
REFERENCES
Adobe (2007a). Adobe director. http://
www.adobe.com/products/director/.
Adobe (2007b). Adobe flash. http://
www.adobe.com/products/flash/.
Bruder, S. and Wedeward, K. (2003). Robotics in the
classroom. IEEE Robotics & Automation Magazine,
10(3):25–29.
Camurri, A., Hashimoto, S., Ricchetti, M., and et al (2000).
Eyesweb: Toward gesture and affect recognition in in-
teractive dance and music systems. Computer Music
Journal, 24(1):57–69.
Ceccarelli, M. (2003). Robotic teachers’ assistants. IEEE
Robotics & Automation Magazine, 10(3):37–45.
Cycling74 (2007). Max/msp. http://www.cycling74.com.
da Costa, B. (2007). Beatriz da costa. http://
www.beatrizdacosta.net/index.php.
f18institute (2007). Cellobot. http://
www.f18institut.org/f18institut/f18robotics.html.
Fagin, B. (2003). Ada/mindstorms 3.0. IEEE Robotics &
Automation Magazine, 10(2):19–24.
Fry, B. and Reas, C. (2007). Processing.org. http://
www.processing.org.
Klassner, F. and Anderson, S. D. (2003). Lego mindstorms:
not just for k-12 anymore. IEEE Robotics Automation
Magazine, 10(2):12–18.
Lego Group (2006a). Lego mindstorms nxt
bluetooth developer kit. http:// mind-
storms.lego.com/Overview/NXTreme.aspx.
Lego Group (2006b). Lego mindstorms nxt
hardware developer kit. http:// mind-
storms.lego.com/Overview/NXTreme.aspx.
Lego Group (2007). Lego.com mindstorms nxt home.
http://mindstorms.lego.com.
Moura, L. and Pereira, H. G. (2004). Man + Robots : Sym-
biotic Art.
Pisaturo, C. (2007). Works of carl pisaturo.
http://www.carlpisaturo.com/index.html.
Puckette, M. (1996). Pure data: another integrated com-
puter music environment. In Proceedings of the Sec-
ond Intercollege Computer Music Concerts, pages 37–
41.
Ullanta (2007). Performance robotics. http://
www.ullanta.com/ullanta/.
Wright, M. and Freed, A. (1997). Opensound control: A
new protocol for communicating with sound synthe-
sizers. In Proceedings of the 1997 International Com-
puter Music Conference.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
182
