
FAIR AND EFFICIENT RESOURCE ALLOCATION
Bicriteria Models for Equitable Optimization
Włodzimierz Ogryczak
Institute of Control & Computation Engineering, Warsaw University of Technology, Nowowiejska 15/19, Warsaw, Poland
Keywords:
Optimization, multiple criteria, efficiency, fairness, equity, resource allocation.
Abstract:
Resource allocation problems are concerned with the allocation of limited resources among competing ac-
tivities so as to achieve the best performances. In systems which serve many usersthere is a need to respect
some fairness rules while looking for the overall efficiency. The so-called Max-Min Fairness is widely used to
meet these goals. However, allocating the resource to optimize the worst performance may cause a dramatic
worsening of the overall system efficiency. Therefore, several other fair allocation schemes are searched and
analyzed. In this paper we focus on mean-equity approaches which quantify the problem in a lucid form of two
criteria: the mean outcome representing the overall efficiency and a scalar measure of inequality of outcomes
to represent the equity (fairness) aspects. The mean-equity model is appealing to decision makers and allows
a simple trade-off analysis. On the other hand, for typical dispersion indices used as inequality measures, the
mean-equity approach may lead to inferior conclusions with respect to the outcomes maximization (system
efficiency). Some inequality measures, however, can be combined with the mean itself into optimization cri-
teria that remain in harmony with both inequality minimization and maximization of outcomes. In this paper
we introduce general conditions for inequality measures sufficient to provide such an equitable consistency.
We verify the conditions for the basic inequality measures thus showing how they can be used not leading to
inferior distributions of system outcomes.
1 INTRODUCTION
Resource allocation problems are concerned with the
allocation of limited resources among competing ac-
tivities (Ibaraki and Katoh, 1988). In this paper, we
focus on approaches that, while allocating resources
to maximize the system efficiency, they also attempt
to provide a fair treatment of all the competing ac-
tivities (Luss, 1999). The problems of efficient and
fair resource allocation arise in various systems which
serve many users, like in telecommunication systems
among others. In networking a central issue is how
to allocate bandwidth to flows efficiently and fairly
(Bonald and Massoulie, 2001; Denda et al., 2000;
Kleinberg et al., 2001; Pi´oro and Medhi, 2004). In
location analysis of public services, the decisions of-
ten concern the placement of a service center or an-
other facility in a position so that the users are treated
fairly in an equitable way, relative to certain criteria
(Ogryczak, 2000). Recently, several research publica-
tions relating the fairness and equity concepts to the
multiple criteria optimization methodology have ap-
peared (Kostreva et al., 2004; Luss, 1999).
The generic resource allocation problem may be
stated as follows. Each activity is measured by an
individual performance function that depends on the
corresponding resource level assigned to that activ-
ity. A larger function value is considered better, like
the performance measured in terms of quality level,
capacity, service amount available, etc. Models with
an (aggregated) objective function that maximizes the
mean (or simply the sum) of individual performances
are widely used to formulate resource allocation prob-
lems, thus defining the so-called mean solution con-
cept. This solution concept is primarily concerned
with the overall system efficiency. As based on aver-
aging, it often provides solution where some smaller
services are discriminated in terms of allocated re-
sources. An alternative approach depends on the so-
called Max-Min solution concept, where the worst
performance is maximized. The Max-Min approach
is consistent with Rawlsian (Rawls, 1971) theory of
justice, especially when additionally regularized with
the lexicographic order. The latter is called the Max-
149
Ogryczak W. (2008).
FAIR AND EFFICIENT RESOURCE ALLOCATION - Bicriteria Models for Equitable Optimization.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - ICSO, pages 149-156
DOI: 10.5220/0001485601490156
Copyright
c
SciTePress

Min Fairness (MMF) and commonly used in network-
ing (Pi´oro and Medhi, 2004; Ogryczak et al., 2005).
Allocating the resources to optimize the worst perfor-
mances may cause, however, a large worsening of the
overall (mean) performances. Therefore, there is a
need to seek a compromise between the two extreme
approaches discussed above.
Fairness is, essentially, an abstract socio-political
concept that implies impartiality, justice and equity
(Rawls and Kelly, 2001; Young, 1994), Neverthe-
less, fairness was frequently quantified with the so-
called inequality measures to be minimized (Atkin-
son, 1970; Rothschild and Stiglitz, 1973). Unfortu-
nately, direct minimization of typical inequality mea-
sures contradicts the maximization of individual out-
comes and it may lead to inferior decisions. In or-
der to ensure fairness in a system, all system entities
have to be equally well provided with the system’s
services. This leads to concepts of fairness expressed
by the equitable efficiency (Kostreva and Ogryczak,
1999; Luss, 1999). The concept of equitably effi-
cient solution is a specific refinement of the Pareto-
optimality taking into account the inequality mini-
mization according to the Pigou-Dalton approach. In
this paper the use of scalar inequality measures in bi-
criteria models to search for fair and efficient allo-
cations is analyzed. There is shown that properties
of convexity and positive homogeneity together with
some boundedness condition are sufficient for a typi-
cal inequality measure to guarantee that it can be used
consistently with the equitable optimization rules.
2 EQUITY AND FAIRNESS
The generic resource allocation problem may be
stated as follows. There is a system dealing with a set
I of m services. There is given a measure of ser-
vices realization within a system. In applications we
consider, the measure usually expresses the service
quality. In general, outcomes can be measured (mod-
eled) as service time, service costs, service delays as
well as in a more subjective way. There is also given
a set Q of allocation patterns (allocation decisions).
For each service i ∈ I a function f
i
(x) of the alloca-
tion pattern x ∈ Q has been defined. This function,
called the individual objective function, measures the
outcome (effect) y
i
= f
i
(x) of allocation x pattern for
service i. In typical formulations a larger value of the
outcome means a better effect (higher service qual-
ity or client satisfaction). Otherwise, the outcomes
can be replaced with their complements to some large
number. Therefore, without loss of generality, we can
assume that each individual outcome y
i
is to be max-
imized which allows us to view the generic resource
allocation problem as a vector maximization model:
max {f(x) : x ∈ Q} (1)
where f(x) is a vector-function that maps the decision
space X = R
n
into the criterion space Y = R
m
, and
Q ⊂ X denotes the feasible set.
Model (1) only specifies that we are interested in
maximization of all objective functions f
i
for i ∈ I =
{1,2,...,m}. In order to make it operational, one
needs to assume some solution concept specifying
what it means to maximize multiple objective func-
tions. The solution concepts may be defined by prop-
erties of the corresponding preference model. The
preference model is completely characterized by the
relation of weak preference, denoted hereafter with
. Namely, the corresponding relations of strict pref-
erence ≻ and indifference
∼
=
are defined by the fol-
lowing formulas:
y
′
≻ y
′′
⇔ (y
′
y
′′
and y
′′
6 y
′
),
y
′
∼
=
y
′′
⇔ (y
′
y
′′
and y
′′
y
′
).
The standard preference model related to the Pareto-
optimal (efficient) solution concept assumes that the
preference relation is reflexive:
y y, (2)
transitive:
(y
′
y
′′
and y
′′
y
′′′
) ⇒ y
′
y
′′′
, (3)
and strictly monotonic:
y+ εe
i
≻ y for ε > 0; i = 1,...,m, (4)
where e
i
denotes the i–th unit vector in the criterion
space. The last assumption expresses that for each in-
dividual objective function more is better (maximiza-
tion). The preference relations satisfying axioms (2)–
(4) are called hereafter rational preference relations.
The rational preference relations allow us to formal-
ize the Pareto-optimality (efficiency) concept with the
following definitions. We say that outcome vector y
′
rationally dominates y
′′
(y
′
≻
r
y
′′
), iff y
′
≻ y
′′
for all
rational preference relations . We say that feasible
solution x ∈ Q is a Pareto-optimal (efficient) solution
of the multiple criteria problem (1), iff y = f(x) is ra-
tionally nondominated.
Simple solution concepts for multiple criteria
problems are defined by aggregation (or utility) func-
tions g : Y → R to be maximized. Thus the multiple
criteria problem (1) is replaced with the maximization
problem
max {g(f(x)) : x ∈ Q} (5)
In order to guarantee the consistency of the aggre-
gated problem (5) with the maximization of all indi-
vidual objective functions in the original multiple cri-
teria problem (or Pareto-optimality of the solution),
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
150

the aggregation function must be strictly increasing
with respect to every coordinate.
The simplest aggregation functions commonly
used for the multiple criteria problem (1) are defined
as the mean (average) outcome
µ(y) =
1
m
m
∑
i=1
y
i
(6)
or the worst outcome
M(y) = min
i=1,...,m
y
i
. (7)
The mean (6) is a strictly increasing function while
the minimum (7) is only nondecreasing. Therefore,
the aggregation (5) using the sum of outcomes always
generates a Pareto-optimal solution while the maxi-
mization of the worst outcome may need some addi-
tional refinement. The mean outcome maximization
is primarily concerned with the overall system effi-
ciency. As based on averaging, it often provides a so-
lution where some services are discriminated in terms
of performances. On the other hand, the worst out-
come maximization, ie, the so-called Max-Min solu-
tion concept is regarded as maintaining equity. In-
deed, in the case of a simplified resource allocation
problem with the knapsack constraints, the Max-Min
solution meets the perfect equity requirement. In the
general case, with possibly more complex feasible
set structure, this property is not fulfilled. Never-
theless, if the perfectly equilibrated outcome vector
¯y
1
= ¯y
2
= ... = ¯y
m
is nondominated, then it is the
unique optimal solution of the corresponding Max-
Min optimization problem. In other words, the per-
fectly equilibrated outcome vector is a unique opti-
mal solution of the Max-Min problem if one cannot
find any (possibly not equilibrated) vector with im-
proved at least one individual outcome without wors-
ening any others. Unfortunately, it is not a common
case and, in general, the optimal set to the Max-Min
aggregation may contain numerous alternative solu-
tions including dominated ones. The Max-Min solu-
tion may be then regularized according to the Rawl-
sian principle of justice (Rawls, 1971) which leads
us to the lexicographic Max-Min concepts or the so-
called Max-Min Fairness (Marchi and Oviedo, 1992;
Ogryczak and
´
Sliwi´nski, 2006).
In order to ensure fairness in a system, all sys-
tem entities have to be equally well provided with
the system’s services. This leads to concepts of fair-
ness expressed by the equitable rational preferences
(Kostreva and Ogryczak, 1999). First of all, the fair-
ness requires impartiality of evaluation, thus focusing
on the distribution of outcome values while ignoring
their ordering. That means, in the multiple criteria
problem (1) we are interested in a set of outcome val-
ues without taking into account which outcome is tak-
ing a specific value. Hence, we assume that the pref-
erence model is impartial (anonymous, symmetric).
In terms of the preference relation it may be written
as the following axiom
(y
π(1)
,...,y
π(m)
)
∼
=
(y
1
,...,y
m
) ∀π ∈ Π(I) (8)
where Π(I) denotes the set of all permutations of
I. This means that any permuted outcome vector is
indifferent in terms of the preference relation. Fur-
ther, fairness requires equitability of outcomes which
causes that the preference model should satisfy the
(Pigou–Dalton) principle of transfers. The principle
of transfers states that a transfer of any small amount
from an outcome to any other relatively worse–off
outcome results in a more preferred outcome vector.
As a property of the preference relation, the principle
of transfers takes the form of the following axiom
y−εe
i
+ εe
j
≻ y for 0 < ε < y
i
−y
j
(9)
The rational preference relations satisfying addition-
ally axioms (8) and (9) are called hereafter fair (equi-
table) rational preference relations. We say that out-
come vector y
′
fairly (equitably) dominates y
′′
(y
′
≻
e
y
′′
), iff y
′
≻y
′′
for all fair rational preference relations
. In other words, y
′
fairly dominates y
′′
, if there
exists a finite sequence of vectors y
j
(j = 1,2,.. .,s)
such that y
1
= y
′′
, y
s
= y
′
and y
j
is constructed from
y
j− 1
by application of either permutation of coordi-
nates, equitable transfer, or increase of a coordinate.
An allocation pattern x ∈Q is called fairly (equitably)
efficient or simply fair if y = f(x) is fairly nondomi-
nated. Note that each fairly efficient solution is also
Pareto-optimal, but not vice verse.
In order to guarantee fairness of the solution con-
cept (5), additional requirements on the class of ag-
gregation (utility) functions must be introduced. In
particular, the aggregation function must be addition-
ally symmetric (impartial), i.e. for any permutation π
of I,
g(y
π(1)
,y
π(2)
,... ,y
π(m)
) = g(y
1
,y
2
,... ,y
m
) (10)
as well as be equitable (to satisfy the principle of
transfers)
g(y
1
,... ,y
i
−ε,... ,y
j
+ ε,... ,y
m
) > g(y
1
,...,y
m
)
(11)
for any 0 < ε < y
i
′
−y
i
′′
. In the case of a strictly
increasing function satisfying both the requirements
(10) and (11), we call the corresponding problem (5)
a fair (equitable) aggregation of problem (1). Every
optimal solution to the fair aggregation (5) of a multi-
ple criteria problem (1) defines some fair (equitable)
solution.
FAIR AND EFFICIENT RESOURCE ALLOCATION - Bicriteria Models for Equitable Optimization
151
Note that both the simplest aggregation functions,
the sum (6) and the minimum (7), are symmetric al-
though they do not satisfy the equitability require-
ment (11). To guarantee the fairness of solutions,
some enforcement of concave properties is required.
For any strictly concave, increasing utility function
u : R → R, the function g(y) =
∑
m
i=1
u(y
i
) is a strictly
monotonic and equitable thus defining a family of the
fair aggregations. Various concave utility functions
u can be used to define such fair solution concepts.
In the case of the outcomes restricted to positive val-
ues, one may use logarithmic function thus resulting
in the Proportional Fairness (PF) solution concept
(Kelly et al., 1997). Actually, it corresponds to the
so-called Nash criterion which maximizes the product
of additional utilities compared to the status quo. For
a common case of upper bounded outcomes y
i
≤ y
∗
one may maximize power functions −
∑
m
i=1
(y
∗
−y
i
)
p
for 1 < p < ∞ which corresponds to the minimization
of the corresponding p-norm distances from the com-
mon upper bound y
∗
(Kostreva et al., 2004).
6
-
y
1
y
2
r
¯y
y
2
= y
1
b
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
@
S(¯y)
D(¯y)
u(y) = u(¯y)
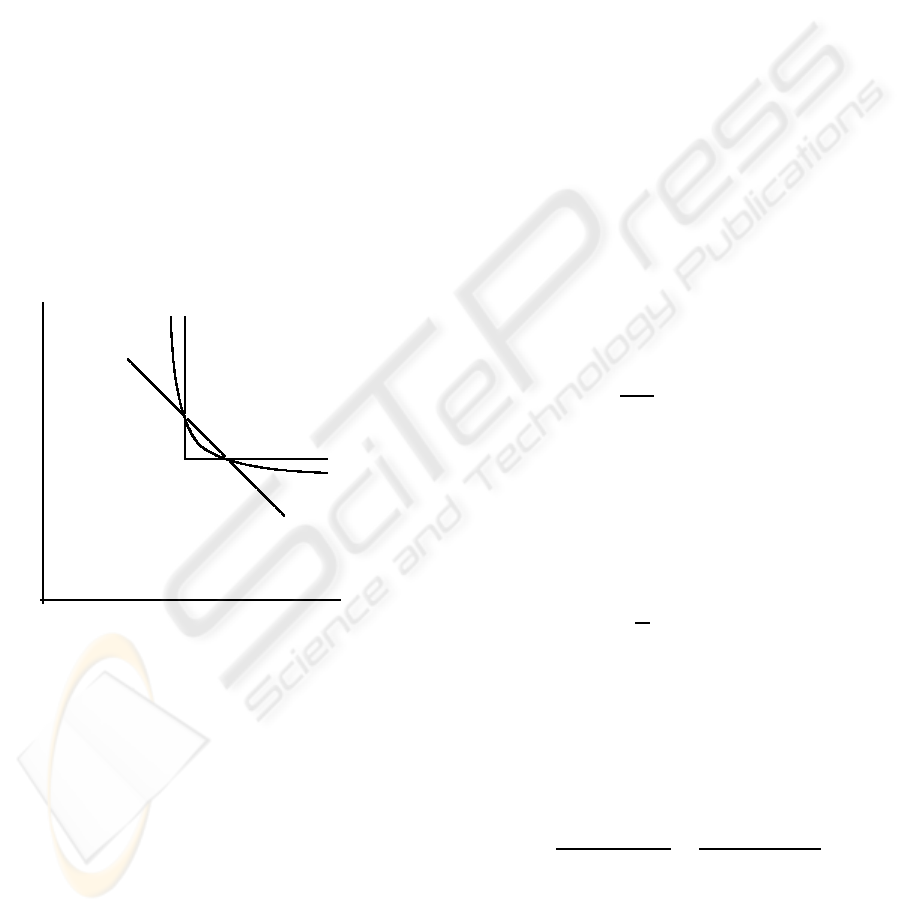
Figure 1: Structure of the fair dominance: D(¯y) – the set
fairly dominated by ¯y, S(¯y) – the set of outcomes fairly
dominating ¯y.
Fig. 1 presents the structure of fair dominance for
two-dimensional outcome vectors. For any outcome
vector ¯y, the fair dominance relation distinguishes set
D(¯y) of dominated outcomes (obviously worse for all
fair rational preferences) and set S(¯y) of dominating
outcomes (obviously better for all fair rational prefer-
ences). However, some outcome vectors are left (in
white areas) and they can be differently classified by
various specific fair rational preferences. The MMF
fairness assigns the entire interior of the inner white
triangle to the set of preferred outcomes while clas-
sifying the interior of the external open triangles as
worse outcomes. Isolines of various utility functions
split the white areas in different ways. One may no-
tice that the set D(¯y) of directions leading to outcome
vectors being dominated by a given ¯y is, in general,
not a cone and it is not convex. Although, when we
consider the set S(¯y) of directions leading to outcome
vectors dominating given ¯y we get a convex set.
3 INEQUALITY MEASURES AND
FAIR CONSISTENCY
Inequality measures were primarily studied in eco-
nomics while recently they become very popular tools
in Operations Research. Typical inequality mea-
sures are some deviation type dispersion characteris-
tics. They are translation invariant in the sense that
ρ(y+ νe) = ρ(y) for any outcome vector y and real
number ν (where e vector of units (1,...,1)), thus
being not affected by any shift of the outcome scale.
Moreover, the inequality measures are also inequality
relevant which means that they are equal to 0 in the
case of perfectly equal outcomeswhile taking positive
values for unequal ones.
The simplest inequality measures are based on the
absolute measurement of the spread of outcomes, like
the mean absolute difference
Γ(y) =
1
2m
2
m
∑
i=1
m
∑
j=1
|y
i
−y
j
| (12)
or the maximum absolute difference
d(y) = max
i, j=1,...,m
|y
i
−y
j
| (13)
In most application frameworksbetter intuitive appeal
may have inequality measures related to deviations
from the mean outcome like the mean absolute de-
viation
δ(y) =
1
m
m
∑
i=1
|y
i
−µ(y)| (14)
or the maximum absolute deviation
R(y) = max
i∈I
|y
i
−µ(y)| (15)
Note that the standard deviation σ (or the variance
σ
2
) represents both the deviations and the spread mea-
surement as
σ
2
(y) =
∑
i∈I
(y
i
−µ(y))
2
m
=
∑
i∈I
∑
j∈I
(y
i
−y
j
)
2
2m
2
(16)
Deviational measures may be focused on the down-
side semideviations as related to worsening of out-
come while ignoring upper semideviations related to
improvement of outcome. One may define the maxi-
mum (downside) semideviation
∆(y) = max
i∈I
(µ(y) −y
i
) (17)
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
152

and the mean (downside) semideviation
¯
δ(y) =
1
m
∑
i∈I
(µ(y) −y
i
)
+
(18)
where (.)
+
denotes the nonnegative part of a num-
ber. Similarly, the standard (downside) semideviation
is given as
¯
σ(y) =
s
1
m
∑
i∈I
(µ(y) −y
i
)
2
+
(19)
In economics one usually considers relative inequal-
ity measures normalized by mean outcome. Among
many inequality measures perhaps the most com-
monly accepted by economists is the Gini coefficient,
which is the relative mean difference. One can easily
notice that direct minimization of typical inequality
measures (especially the relative ones) may contra-
dict the optimization of individual outcomes resulting
in equal but very low outcomes. As some resolution
one may consider a bicriteria mean-equity model:
max {(µ(f(x)),−ρ(f(x))) : x ∈ Q} (20)
which takes into account both the efficiency with op-
timization of the mean outcome µ(y) and the eq-
uity with minimization of an inequality measure ρ(y).
For typical inequality measures bicriteria model (20)
is computationally very attractive since both the cri-
teria are concave and LP implementable for many
measures. Unfortunately, for any dispersion type in-
equality measures the bicriteria mean-equity model
is not consistent with the outcomes maximization,
and therefore is not consistent with the fair domi-
nance. When considering a simple discrete problem
with two allocation patterns P1 and P2 generating
outcome vectors y
′
= (0, 0) and y
′′
= (2,8), respec-
tively, for any dispersion type inequality measure one
gets ρ(y
′′
) > 0 = ρ(y
′
) while µ(y
′′
) = 5 > 0 = µ(y
′
).
Hence, y
′′
is not bicriteria dominated by y
′
and vice
versa. Thus for any dispersion type inequality mea-
sure ρ, allocation P1 with obviously worse outcome
vector than that for allocation P2 is a Pareto-optimal
solution in the corresponding bicriteria mean-equity
model (20).
Note that the lack of consistency of the mean-
equity model (20) with the outcomes maximization
applies also to the case of the maximum semidevia-
tion ∆(y) (17) used as an inequality measure whereas
subtracting this measure from the mean µ(y)−∆(y) =
M(y) results in the worst outcome and thereby the
first criterion of the MMF model. In other words, al-
though a direct use of the maximum semideviation in
the mean-equity model may contradict the outcome
maximization, the measure can be used complemen-
tary to the mean leading us to the worst outcome cri-
terion which does not contradict the outcome max-
imization. This construction can be generalized for
various (dispersion type) inequality measures. More-
over, we allowthe measures to be scaled with any pos-
itive factor α > 0, in order to avoid creation of new
inequality measures as one could consider ρ
α
(X) =
αρ(X) as a different inequality measure. For any in-
equality measure ρ we introduce the corresponding
underachievement function defined as the difference
of the mean outcome and the (scaled) inequality mea-
sure itself, i.e.
M
αρ
(y) = µ(y) −αρ(y). (21)
This allows us to replace the original mean-equity bi-
criteria optimization (20) with the following bicriteria
problem:
max{(µ(f(x)),µ(f(x)) −αρ(f(x))) : x ∈Q} (22)
where the second objective represents the correspond-
ing underachievement measure M
αρ
(y) (21). Note
that for any inequality measure ρ(y) ≥ 0 one gets
M
αρ
(y) ≤ µ(y) thus really expressing underachieve-
ments (comparing to mean) from the perspective of
outcomes being maximized.
We will say that an inequality measure ρ is fairly
α-consistent if
y
′
e
y
′′
⇒ µ(y
′
) −αρ(y
′
) ≥ µ(y
′′
) −αρ(y
′′
) (23)
The relation of fair α-consistency will be called
strong if, in addition to (23), the following holds
y
′
≻
e
y
′′
⇒ µ(y
′
) −αρ(y
′
) > µ(y
′′
) −αρ(y
′′
). (24)
Theorem 1. If the inequality measure ρ(y) is fairly
α-consistent (23), then except for outcomes with iden-
tical values of µ(y) and ρ(y), every efficient solution
of the bicriteria problem (22) is a fairly efficient allo-
cation pattern. In the case of strong consistency (24),
every allocation pattern x ∈ Q efficient to (22) is, un-
conditionally, fairly efficient.
Proof. Let x
0
∈ Q be an efficient solution of (22).
Suppose that x
0
is not fairly efficient. This means,
there exists x ∈ Q such that y = f(x) ≻
e
y
0
= f(x
0
).
Then, it follows µ(y) ≥ µ(y
0
), and simultaneously
µ(y) −αρ(y) ≥ µ(y
0
) −αρ(y
0
), by virtue of the fair
α-consistency (23). Since x
0
is efficient to (22) no in-
equality can be strict, which implies µ(y) = µ(y
0
) and
and ρ(y) = ρ(y
0
).
In the case of the strong fair α-consistency (24),
the supposition y = f(x) ≻
e
y
0
= f(x
0
) implies µ(y) ≥
µ(y
0
) and µ(y)−αρ(y) > µ(y
0
)−αρ(y
0
) which con-
tradicts the efficiency of x
0
with respect to (22).
Hence, the allocation pattern x
0
is fairly efficient.
FAIR AND EFFICIENT RESOURCE ALLOCATION - Bicriteria Models for Equitable Optimization
153

4 FAIR CONSISTENCY
CONDITIONS
Typical dispersion type inequality measures are con-
vex, i.e. ρ(λy
′
+ (1 −λ)y
′′
) ≤ λρ(y
′
) + (1−λ)ρ(y
′′
)
for any y
′
,y
′′
and 0 ≤ λ ≤ 1. Certainly, the under-
achievementfunction M
αρ
(y) must be also monotonic
for the fair consistency which enforces more restric-
tions on the inequality measures. We will show fur-
ther that convexity together with positive homogene-
ity and some boundedness of an inequality measure
is sufficient to guarantee monotonicity of the corre-
sponding underachievement measure and thereby to
guarantee the fair α-consistency of inequality mea-
sure itself.
We say that (dispersion type) inequality measure
ρ(y) ≥ 0 is ∆-bounded if it is upper bounded by the
maximum downside deviation, i.e.,
ρ(y) ≤ ∆(y) ∀y. (25)
Moreover, we say that ρ(y) ≥ 0 is strictly ∆-bounded
if inequality (25) is a strict bound, except from the
case of perfectly equal outcomes, i.e., ρ(y) < ∆(y)
for any y such that ∆(y) > 0.
Theorem 2. Let ρ(y) ≥ 0 be a convex, positively
homogeneous and translation invariant (dispersion
type) inequality measure. If αρ(y) is ∆-bounded, then
ρ(y) is fairly α-consistent in the sense of (23).
Proof. The relation of fair dominance y
′
e
y
′′
de-
notes that there exists a finite sequence of vectors
y
0
= y
′′
,y
1
,... ,y
t
such that y
k
= y
k−1
−ε
k
e
i
′
+ ε
k
e
i
′′
,
0 ≤ε
k
≤y
k−1
i
′
−y
k−1
i
′′
for k = 1,2,.. .,t and there exists
a permutation π such that y
′
π(i)
≥ y
t
i
for all i ∈I. Note
that the underachievement function M
αρ
(y), similar
as ρ(y) depends only on the distribution of outcomes.
Further, if y
′
≥ y
′′
, then y
′
= y
′′
+ (y
′
−y
′′
) and y
′
−
y
′′
≥ 0. Hence, due to concavity and positive homo-
geneity, M
αρ
(y
′
) ≥ M
αρ
(y
′′
) + M
αρ
(y
′
−y
′′
). More-
over, due to the bound (25), M
αρ
(y
′
−y
′′
) ≥ µ(y
′
−
y
′′
) −∆(y
′
−y
′′
) ≥ µ(y
′
−y
′′
) −µ(y
′
−y
′′
) = 0. Thus,
M
αρ
(y) satisfies also the requirement of monotonic-
ity. Hence, M
αρ
(y
′
) ≥ M
αρ
(y
t
). Further, let us notice
that y
k
= λ
¯
y
k−1
+ (1−λ)y
k−1
where
¯
y
k−1
= y
k−1
−
(y
i
′
−y
i
′′
)e
i
′
+ (y
i
′
−y
i
′′
)e
i
′′
and λ = ε/(y
i
′
−y
i
′′
). Vec-
tor
¯
y
k−1
has the same distribution of coefficients as
y
k−1
(actually it represents results of swapping y
i
′
and y
i
′′
). Hence, due to concavity of M
αρ
(y), one
gets M
αρ
(y
k
) ≥ λM
αρ
(
¯
y
k−1
) + (1 −λ)M
αρ
(y
k−1
) =
M
αρ
(y
k−1
). Thus, M
αρ
(y
′
) ≥ M
αρ
(y
′′
) which justifies
the fair α-consistency of ρ(y).
For strong fair α-consistency some strict
monotonicity and concavity properties of the un-
derachievement function are needed. Obviously,
there does not exist any inequality measure which is
positively homogeneous and simultaneously strictly
convex. However, one may notice from the proof
of Theorem 2 that only convexity properties on
equally distributed outcome vectors are important for
monotonous underachievement functions.
We say that inequality measure ρ(y) ≥0 is strictly
convex on equally distributed outcome vectors, if
ρ(λy
′
+ (1−λ)y
′′
) < λρ(y
′
) + (1−λ)ρ(y
′′
)
for 0 < λ < 1 and any two vectors y
′
6= y
′′
representing
the same outcomes distribution as some y, i.e., y
′
=
(y
π
′
(1)
,... ,y
π
′
(m)
) π
′
and y
′′
= (y
π
′′
(1)
,... ,y
π
′′
(m)
) for
some permutations π
′
and π
′′
, respectively.
Theorem 3. Let ρ(y) ≥ 0 be a convex, positively
homogeneous and translation invariant (dispersion
type) inequality measure. If ρ(y) is also strictly con-
vex on equally distributed outcomes and αρ(y) is
strictly ∆-bounded, then the measure ρ(y) is fairly
strongly α-consistent in the sense of (24).
Proof. The relation of weak fair dominance y
′
e
y
′′
denotes that there exists a finite sequence of vectors
y
0
= y
′′
,y
1
,... ,y
t
such that y
k
= y
k−1
−ε
k
e
i
′
+ ε
k
e
i
′′
,
0 ≤ε
k
≤y
k−1
i
′
−y
k−1
i
′′
for k = 1,2,.. .,t and there exists
a permutation π such that y
′
π(i)
≥ y
t
i
for all i ∈ I. The
strict fair dominance y
′
≻
e
y
′′
means that y
′
π(i)
> y
t
i
for
some i ∈ I or at least one ε
k
is strictly positive. Note
that the underachievement function M
αρ
(y) is strictly
monotonousand strictly convex on equally distributed
outcome vectors. Hence, M
αρ
(y
′
) > M
αρ
(y
′′
) which
justifies the fair strong α-consistency of the measure
ρ(y).
The specific case of fair 1-consistency is also
called the mean-complementary fair consistency.
Note that the fair
¯
α-consistency of measure ρ(y) ac-
tually guarantees the mean-complementary fair con-
sistency of measure αρ(y) for all 0 < α ≤
¯
α, and the
same remain valid for the strong consistency proper-
ties. It follows from a possible expression of µ(y) −
αρ(y) as the convex combination of µ(y)−
¯
αρ(y) and
µ(y). Hence, for any y
′
e
y
′′
, due to µ(y
′
) ≥ µ(y
′′
)
one gets µ(y
′
) −αρ(y
′
) ≥ µ(y
′′
) −αρ(y
′′
) in the case
of the fair
¯
α-consistency of measure ρ(y) (or respec-
tive strict inequality in the case of strong consistency).
Therefore, while analyzing specific inequality mea-
sures we seek the largest values α guaranteeing the
corresponding fair consistency.
As mentioned, typical inequality measures are
convex and many of them are positively homoge-
neous. Moreover, the measures such as the mean ab-
solute (downside) semideviation
¯
δ(y) (18), the stan-
dard downside semideviation
¯
σ(y) (19), and the mean
absolute difference Γ(y) (12) are ∆-bounded. Indeed,
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
154

one may easily notice that µ(y)−y
i
≤∆(y) and there-
fore
¯
δ(y) ≤
1
m
∑
i∈I
∆(y) = ∆(y),
¯
σ(y) ≤
p
∆(y)
2
=
∆(y) and Γ(y) =
1
m
2
∑
i∈I
∑
j∈I
(max{y
i
,y
j
}−µ(y)) ≤
∆(y). Actually, all these inequality measures are
strictly ∆-bounded since for any unequal outcome
vector at least one outcome must be below the
mean thus leading to strict inequalities in the above
bounds. Obviously, ∆-bounded (but not strictly) is
also the maximum absolute downside deviation ∆(y)
itself. This allows us to justify the maximum down-
side deviation ∆(y) (17), the mean absolute (down-
side) semideviation
¯
δ(y) (18), the standard down-
side semideviation
¯
σ(y) (19) and the mean absolute
difference Γ(y) (12) as fairly 1-consistent (mean-
complementary fairly consistent) in the sense of (23).
We emphasize that, despite the standard semide-
viation is a fairly 1-consistent inequality measure, the
consistency is not valid for variance, semivariance
and even for the standard deviation. These measures,
in general, do not satisfy the all assumptions of The-
orem 2. Certainly, we have enumerated only the sim-
plest inequality measures studied in the resource allo-
cation context which satisfy the assumptions of The-
orem 2 and thereby they are fairly 1-consistent. The-
orem 2 allows one to show this property for many
other measures. In particular, one may easily find
out that any convex combination of fairly α-consistent
inequality measures remains also fairly α-consistent.
On the other hand, among typical inequality measures
the mean absolute difference seems to be the only one
meeting the stronger assumptions of Theorem 3 and
thereby maintaining the strong consistency.
As mentioned, the mean absolute deviation is
twice the mean absolute downside semideviation
which means that αδ(y) is ∆-boundedfor any 0 < α ≤
0.5. The symmetry of mean absolute semideviations
¯
δ(y) =
∑
i∈I
(y
i
−µ(y))
+
=
∑
i∈I
(µ(y) −y
i
)
+
can be
also used to derive some ∆-boundedness relations for
other inequality measures. In particular, one may find
out that for m-dimensional outcome vectors of un-
weighted problem, any downside semideviation from
the mean cannot be larger than m−1 upper semidevi-
ations. Hence, the maximum absolute deviation satis-
fies the inequality
1
m−1
R(y) ≤ ∆(y), while the maxi-
mum absolute difference fulfills
1
m
d(y) ≤∆(y). Simi-
larly, for the standard deviation one gets
1
√
m−1
δ(y) ≤
∆(y). Actually, ασ(y) is strictly ∆-bounded for any
0 < α ≤ 1/
√
m−1 since for any unequal outcome
vector at least one outcome must be below the mean
thus leading to strict inequalities in the above bounds.
These allow us to justify the mean absolute semidevi-
ation with 0 < α ≤ 0.5, the maximum absolute devia-
tion with 0 < α ≤
1
m−1
, the maximum absolute differ-
ence with 0 < α ≤
1
m
and the standard deviation with
0 < α ≤
1
√
m−1
as fairly α-consistent within the spec-
ified intervals of α. Moreover, the α-consistency of
the standard deviation is strong.
Table 1: Fair consistency results.
Measure α–consistency
Mean abs. semidev.
¯
δ(y) (18)
1
Mean abs. dev.
δ(y) (14) 0.5
Max. semidev.
∆(y) (17) 1
Max. abs. dev. R(y) (15)
1
m−1
Mean abs. diff.
Γ(y) (12) 1 strong
Max. abs. diff.
d(y) (13)
1
m
Standard semidev.
¯
σ(y) (19)
1
Standard dev. σ(y) (16)
1
√
m−1
strong
The fair consistency results for basic dispersion type
inequality measures considered in resource alloca-
tion problems are summarized in Table 1 where α
values are given and the strong consistency is indi-
cated. Table 1 points out how the inequality measures
can be used in resource allocation models to guar-
antee their harmony both with outcome maximiza-
tion (Pareto-optimality) and with inequalities mini-
mization (Pigou-Dalton equity theory). Exactly, for
each inequality measure applied with the correspond-
ing value α from Table 1 (or smaller positive value),
every efficient solution of the bicriteria problem (22),
ie. max{(µ(f(x)),µ(f(x)) −αρ(f(x))) : x ∈ Q}, is a
fairly efficient allocation pattern, except for outcomes
with identical values of µ(y) and ρ(y). In the case of
strong consistency (as for mean absolute difference or
standard deviation), every solution x ∈ Q efficient to
(22) is, unconditionally, fairly efficient.
The consistency results summarized in Table 1 are
sufficient conditions. This means that whenever the α
limit is observed the corresponding consistency rela-
tion is valid for any problem. It may happen that for
a specific problem instance and a specific inequality
measure the fair consistency is valid for larger values
of α. Nevertheless, we have provided strict bounds
in the sense that for a larger value of α there exists a
resource allocation problem on which the fair consis-
tency is not valid, and the bicriteria problem (22) may
generate dominated solution.
5 CONCLUSIONS
The problems of efficient and fair resource allocation
arise in various systems which serve many users. Fair-
ness is, essentially, an abstract socio-political concept
that implies impartiality, justice and equity. Neverthe-
FAIR AND EFFICIENT RESOURCE ALLOCATION - Bicriteria Models for Equitable Optimization
155

less, in operations research it was quantified with var-
ious solution concepts (Denda et al., 2000). The eq-
uitable optimization with the preference structure that
complies with both the efficiency (Pareto-optimality)
and with the Pigou-Dalton principle of transfers may
be used to formalize the fair solution concepts. Mul-
tiple criteria models equivalent to equitable optimiza-
tion allows to generate a variety of fair and efficient
resource allocation patterns (Kostreva et al., 2004;
Ogryczak et al., 2008).
In this paper we haveanalyzed how scalar inequal-
ity measures can be used to guarantee the fair consis-
tency. It turns out that several inequality measures can
be combined with the mean itself into the optimiza-
tion criteria generalizing the concept of the worst out-
come and generating fairly consistent underachieve-
ment measures. We have shown that properties of
convexity and positive homogeneity together with be-
ing bounded by the maximum downside semidevia-
tion are sufficient for a typical inequality measure to
guarantee the corresponding fair consistency. It al-
lows us to identify various inequality measures which
can be effectively used to incorporate fairness fac-
tors into various resource allocation problems while
preserving the consistency with outcomes maximiza-
tion. Among others, the standard semideviation and
the mean semideviation turn out to be such a consis-
tent inequality measure while the mean absolute dif-
ference is strongly consistent.
Our analysis is related to the properties of solu-
tions to resource allocation models. It has been shown
how inequality measures can be included into the
models avoiding contradiction to the maximization of
outcomes. We do not analyze algorithmic issues for
the specific resource allocation problems. Generally,
the requirement of convexity necessary for the consis-
tency, guarantees that the corresponding optimization
criteria belong to the class of convex optimization, not
complicating the original resource allocation model
with any additional discrete structure. Many of the in-
equality measures, we analyzed, can be implemented
with auxiliary linear programming constraints. Nev-
ertheless, further research on efficient computational
algorithms for solving the specific models is neces-
sary.
REFERENCES
Atkinson, A. (1970). On the measurement of inequality. J.
Economic Theory, 2:244–263.
Bonald, T. and Massoulie, L. (2001). Impact of fairness on
internet performance. In Proceedings of ACM Sigmet-
rics, pages 82–91.
Denda, R., Banchs, A., and Effelsberg, W. (2000). The
fairness challenge in computer networks. Lect. Notes
Comp. Sci., 1922:208–220.
Ibaraki, T. and Katoh, N. (1988). Resource Allocation
Problems, Algorithmic Approaches. MIT Press, Cam-
bridge.
Kelly, F., Mauloo, A., and Tan, D. (1997). Rate con-
trol for communication networks: shadow prices, pro-
portional fairness and stability. J. Opnl. Res. Soc.,
49:206–217.
Kleinberg, J., Rabani, Y., and Tardos, E. (2001). Fairness
in routing and load balancing. J. Comput. Syst. Sci.,
63:2–21.
Kostreva, M. M. and Ogryczak, W. (1999). Linear opti-
mization with multiple equitable criteria. RAIRO Op-
erations Research, 33:275–297.
Kostreva, M. M., Ogryczak, W., and Wierzbicki, A. (2004).
Equitable aggregations and multiple criteria analysis.
Eur. J. Opnl. Res., 158:362–377.
Luss, H. (1999). On equitable resource allocation problems:
A lexicographic minimax approach. Operations Re-
search, 47:361–378.
Marchi, E. and Oviedo, J. A. (1992). Lexicographic op-
timality in the multiple objective linear programming:
the nucleolar solution. Eur. J. Opnl. Res., 57:355–359.
Ogryczak, W. (2000). Inequality measures and equitable
approaches to location problems. Eur. J. Opnl. Res.,
122:374–391.
Ogryczak, W., Pi´oro, M., and Tomaszewski, A. (2005).
Telecommunications network design and max-min
optimization problem. J. Telecom. Info. Tech., 3:1–14.
Ogryczak, W. and
´
Sliwi´nski, T. (2006). On direct methods
for lexicographic min-max optimization. Lect. Notes
Comp. Sci., 3982:774–783.
Ogryczak, W., Wierzbicki, A., and Milewski, M. (2008). A
multi-criteria approach to fair and efficient bandwidth
allocation. OMEGA, 36:451–463.
Pi´oro, M. and Medhi, D. (2004). Routing, Flow and Ca-
pacity Design in Communication and Computer Net-
works. Morgan Kaufmann, San Francisco.
Rawls, J. (1971). The Theory of Justice. Harvard Univ.
Press, Cambridge.
Rawls, J. and Kelly, E. (2001). Justice as Fairness: A Re-
statement. Harvard Univ. Press, Cambridge.
Rothschild, M. and Stiglitz, J. E. (1973). Some further re-
sults in the measurement of inequality. J. Econ. The-
ory, 6:188–204.
Young, H. P. (1994). Equity in Theory and Practice. Prince-
ton Univ. Press, Princeton.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
156
