
P
ARAMETER TUNING OF ROUTING PROTOCOLS TO IMPROVE
THE PERFORMANCE OF MOBILE ROBOT TELEOPERATION VIA
WIRELESS AD-HOC NETWORKS
Florian Zeiger, Nikolaus Kraemer and Klaus Schilling
University of Wuerzburg, Department of Robotics and Telematics, Am Hubland, Wuerzburg, Germany
Keywords:
Networked robots, mobile robot teleoperation, mobile robot ad-hoc networks, wireless network, ad-hoc net-
work, wireless teleoperation, wireless remote control.
Abstract:
Currently, the use of wireless networks is very common in the field of networked robotics and can be consid-
ered as a key issue for capable multi robot systems with a high grade of mobility. Nevertheless, this mobility
requests for special features of the communication infrastructure, which leads to the integration of mobile
robots into wireless ad-hoc networks. Since the late nineties, more than 80 ad-hoc routing protocols were
developed and nowadays some of them are implemented and ready to use in real world applications. A com-
parison of four ad-hoc routing protocols (AODV, DSR, OLSR, and BATMAN) showed some shortfalls of the
default parameter settings not allowing a reliable teleoperation of mobile robots while using AODV, OLSR,
or BATMAN. This work is focused on the parameter tuning of the routing protocols to use them in wireless
ad-hoc networks of mobile robots. The time required for route reestablishing, as well as the packet loss during
rerouting is investigated in hardware tests of a network with dynamic network topology consisting of mo-
bile robots. It could be demonstrated, that an appropriate parameter setting of OLSR and AODV allow the
teleoperation of mobile robots in outdoor environments via a wireless ad-hoc network.
1 INTRODUCTION
Currently, more and more research is done in the
field of teleoperation of mobile robot teams via wire-
less networks. As now a larger number of mobile
robots are developed which are capable to operate
in impassable or hazardous environments with little
or no communication infrastructure, the communica-
tion infrastructure is set up by the robots itself on de-
mand. Within these wireless ad-hoc networks, differ-
ent types of nodes might be present: human workers
or rescue personnel equipped with modern communi-
cation devices, mobile robots, or even some stationary
nodes. All of them are able to act as data source, data
sink, and communication relay and must support a dy-
namic network topology. In the field of networked
robotics, several approaches are using wireless ad-
hoc networks in many different areas of robot tele-
operation. Multi-robot exploration with robots using
wireless networks (Rooker and Birk, 2007) or a mo-
bile robot team connected via wireless network which
performed localization and control tasks (Das et al.,
2002). Also in the field of rescue robotics (Rooker
and Birk, 2005), or for integrating UAVs into IP based
ground networks (Zeiger et al., 2007), the use of wire-
less networks is quiet common nowadays.
An example for the network topology of these fu-
ture scenarios is given in Figure 1. The network con-
sists of several stationary nodes or ground stations
and several mobile nodes which can be ground ve-
hicles, aerial vehicles, or humans equipped with com-
Figure
1: Future scenario of a heterogeneous network of
mobile robots and human.
53
Zeiger F., Kraemer N. and Schilling K. (2008).
PARAMETER TUNING OF ROUTING PROTOCOLS TO IMPROVE THE PERFORMANCE OF MOBILE ROBOT TELEOPERATION VIA WIRELESS
AD-HOC NETWORKS.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - RA, pages 53-60
DOI: 10.5220/0001488800530060
Copyright
c
SciTePress

munication devices. All these nodes are connected
by an ad-hoc wireless network which should guaran-
tee a transparent any-to-any communication. Never-
theless, wireless communication always implies un-
predictable communication delays, packet loss, or in
worst case the loss of the link which makes the provi-
sion of the required quality a challenging task (Hsieh
et al., 2006). To avoid the loss of communication,
research focused on a dynamic setup of the required
telecommunication infrastructure by placing relay
nodes on demand (Nguyen et al., 2004)(Pezeshkian
et al., 2007) or using mobile robots as relay nodes
(Nguyen et al., 2003)(Pezeshkian et al., 2006). These
approaches are using communication relays in wire-
less ad-hoc networks to setup communication net-
works with dynamic topologies. In these wireless net-
works no fixed infrastructure exists, and each mobile
node not only works as host but also as router for
data packets of other nodes. These dynamic topolo-
gies of wireless communication networks have ad-
vantages like providing direct and indirect any-to-
any communication of each network node, redundant
communication links in larger networks, no central
administration, and a distribution of the traffic load
in large networks. Of course, these advantages can
only be used with rather complex and special rout-
ing protocols providing each node the necessary in-
formation about the network topology. The nodes it-
self are working as routers and must store the routing
information of the complete network locally. In the
field of wireless telecommunication, more than 80 ad-
hoc routing protocols for wireless networks were de-
veloped (Johnson and Maltz, 1996)(Redi and Welsh,
1999)(Das et al., 2003)(Chakeres and Belding-Royer,
2004). Also some simulations for performance eval-
uations for larger scale telecommunication networks
were done in the past (Broch et al., 1998)(Das et al.,
2001)(Dyer and Boppana, 2001). (Johansson et al.,
1999) compared several ad-hoc routing protocols in a
simulation study and (Kiess and Mauve, 2007) gives
a survey of currently existing real-world implemen-
tations of ad-hoc routing protocols, including some
real-world scenario tests.
This work is based on the results of a former pub-
lication (Zeiger et al., 2008), which compares sev-
eral ad-hoc routing protocols with respect to mo-
bile robot teleoperation. The standard parameter set-
tings of the routing protocols AODV, OLSR, DSR,
and BATMAN were investigated. Unfortunately, only
DSR showed to be an appropriate solution for mo-
bile robot teleopreation and the performance other
three routing protocols had to be improved by pa-
rameter tuning. This work is focused on the pa-
rameter tuning of OLSR, AODV, and BATMAN.
The objective is an acceptable packet loss and time
for rerouting in a highly dynamic network topol-
ogy. Therefore, existing protocol implementations of
AODV and DSR (http://core.it.uu.se/core/index.php)
from Uppsala University and the University of
Basel, OLSR (http://www.olsr.org) and BATMAN
(https://www.open-mesh.net/batman) are used in real-
world test scenarios where mobile robots are teleop-
erated in an outdoor environment.
The presented work is structured as follows. in
Section 2, the used hardware and the real-world test
scenarios are described. Section 3 gives a brief sum-
mary of a comparison of AODV, DRS, OLSR, and
BATMAN with respect to mobile robot teleoperation
with standard parameter settings. The results of this
work – the parameter tuning of ad-hoc routing proto-
cols to enable mobile robot teleoperation via wireless
ad-hoc networks – are presented in Section 4. A con-
clusion is given in Section 5.
2 HARDWARE AND TEST SETUP
2.1 Hardware
For the performed tests, several mobile nodes were
used. One node is a PC for the operator. Up to 4
MERLIN robots (standard version) were used as sta-
tionary communication relay nodes, and one Outdoor
MERLIN was used (cf. Figure 2) (Eck et al., 2007).
Figure 2: The Teleoperated OutdoorMERLIN Robot.
All MERLIN robots have a C167 micro controller
for low-level operations and sensor data processing,
as well as a PC-104 for more complex and compu-
tationally more intensive tasks. The PC-104 uses a
Linux operating system and all nodes are equipped
with 802.11b standard WLAN equipment (Atheros
chip). More information on the MERLIN robots
is given at www7.informatik.uni-wuerzburg.de. For
steering the mobile robot, the operator’s PC is run-
ning an application which generates command pack-
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
54

ets of a size between 6 and 22 bytes of payload. These
packets are sent via UDP over the wireless network to
the mobile robot. The onboard software of the mobile
robot generates a UDP packet stream of packets with
variable size containing the sensor data.
2.2 Test Setup
The scenario is set up in a way that the rerouting pro-
cedure will start with the mobile robot being at a cer-
tain location. Therefore, a large building is used as
obstacle (cf. Figure 3). Relay nodes are placed at the
corners of the building, such that they have always the
neighbor nodes at the next and previous corner of the
building within their communication range. As soon
as the mobile robot is moved out of the line-of-sight of
one node, the rerouting procedure is initialized. This
scenario represents a worst case in terms of link re-
dundancy, as only one route between operator PC and
mobile robot is available. Relevant measurement cat-
egories are the packet loss and the duration of a com-
munication drop-out during rerouting.
Figure 3: Test Setup.
3 AD-HOC ROUTING &
TELEOPERATION
3.1 Investigated Protocols
This work investigates the parameter settings for dif-
ferent ad-hoc routing protocols: Ad-hoc On-demand
Distance Vector (AODV), Dynamic Source Routing
(DSR), and Optimized Link State routing (OLSR).
AODV (Das et al., 2003) (Chakeres and Belding-
Royer, 2004) is a reactive routing protocol and de-
termines required routes on-demand. To discover a
route to an unknown destination, a Route Request
(RREQ) message is broadcasted. Each intermediate
node which is not the destination and without a route
to the destination receiving a RREQ broadcasts it fur-
ther. In case the RREQ is received more than once,
only the first reception will result in a broadcast. To
avoid uncontrolled dissemination of RREQs, each has
a certain time to live (TTL) after which it is discarded.
When the destination receives a RREQ message a
Route Reply (RREP) message is generated and sent
back to the source in unicast hop by hop fashion along
the route which was determined by the RREQ mes-
sage. After generating a RREP message, the RREQ
message is discarded at this node. As the RREP prop-
agates, each intermediate node creates a route to the
destination. After the source receives the RREP, it
records the route to the destination and begins sending
data. In case the source receives multiple RREPs, the
route with the shortest hop count is chosen. The status
of each route is maintained in the local routing table
and timers are used to determine link failures. In case
a certain node is part of an active route, Hello mes-
sages are used to obtain the route status. These Hello
messages are broadcasted periodically to all neigh-
bors. If a neighbor does not send a Hello message
within a specified time a link loss is detected and the
node is deleted from the routing table. In addition, a
Route Error message (RRER) is generated. More de-
tailed information on AODV is given in (Das et al.,
2003). In the test scenarios of this work, AODV-UU
version 0.9.5 from Uppsala University (Sweden) is
used (http://core.it.uu.se/core/index.php/AODV-UU).
DSR is also a reactive ad-hoc routing protocol
which works similar to AODV but without using
Hello messages for route maintenance. However,
it uses source routing (DARPA Internet Program,
1981). DSR does not use any periodic routing ad-
vertisement, link status sensing, or neighbor detection
packets, and does not rely on these functions from any
underlying protocols in the network. DSR is com-
posed of two main mechanisms that work together to
allow the discovery and maintenance of source routes
in the ad-hoc network. In case source node (S) wants
to send data to an unknown destination host (D), S
initiates the route discovery mechanism. S broadcasts
a route request message which identifies the source
and destination of the route discovery to all neigh-
bors. A route request also contains a record list-
ing the address of each intermediate node which for-
warded this particular copy of the route request. A
node which receives this route request without being
the destination looks up for a source route to the re-
quested destination in its own route cache. Without
any source route present in its route cache, the node
PARAMETER TUNING OF ROUTING PROTOCOLS TO IMPROVE THE PERFORMANCE OF MOBILE ROBOT
TELEOPERATION VIA WIRELESS AD-HOC NETWORKS
55

appends its own address to the route record and broad-
casts the route request message. In case this request
message was received more than once, it is simply
discarded. As soon as the route request message ar-
rives at the desired destination D, a route reply mes-
sage to S is created which contains an accumulated
route record of the route request. After S receives
this route reply, it caches the corresponding route in
its route cache and S is ready to transmit data. Of
course, there exist mechanisms to omit flooding of
the network with route requests. A hop limit was in-
troduced and every time a route request is forwarded,
the hop limit is decremented by one. As soon as it
reaches zero, the request is discarded. Also mecha-
nisms for avoiding infinite recursion of route discov-
eries are implemented. A more detailed description
of this protocol is given in (Johnson and Maltz, 1996)
(Hu et al., 2004). The presented work uses DSR-
UU version 0.2 from Uppsala University (Sweden)
(http://core.it.uu.se/core/index.php/DSR-UU).
OLSR is a table-driven pro-active routing pro-
tocol for mobile ad-hoc networks. It uses hop-by-
hop routing (each node uses its local information
to route packets). OLSR minimizes the overhead
from flooding of control traffic by using only se-
lected nodes called Multipoint Relays (MPR) to
retransmit control messages. Each node in the net-
work selects a set of nodes in its neighborhood,
which may retransmit its messages. This set of se-
lected neighbor nodes is called the MPR set of that
node. The neighbors of node N which are not in
its MPR set, receive and process broadcast messages
but will never retransmit broadcast messages received
from node N. The MPR set is selected such, that
every node in the 2-hop neighborhood of N has a
link to the MPRs of N. OLSR continuously main-
tains routes to all destinations in the network by
distributing link and neighborhood information (pe-
riodically exchange Hello messages). These mes-
sages are also used for link sensing and for check-
ing the connectivity. More details on OLSR are
given in (Clausen, 2003). The scenario tests in the
present work are performed with OLSR version 0.5.3
(http://www.olsr.org/index.cgi?action=download).
BATMAN (Better approach to mobile ad-hoc net-
working) is a new approach to ad-hoc routing. Unlike
other algorithms that exist right now, BATMAN does
not calculate routes. It continuously detects and main-
tains the routes by receiving and broadcasting packets
from other nodes. Instead of discovering the complete
route to a destination node, BATMAN only identifies
the best single-hop neighbor and sends a message to
this neighbor. These messages contain the source ad-
dress, a sequence number, and a time-to-live (TTL)
value that is decremented by 1 every time before the
packet is broadcasted. A message with a TTL value of
zero is dropped. The sequence number of these mes-
sages is of particular importance for the BATMAN
algorithm. As a source numbers its messages, each
node knows whether a message is received the first
time or repeatedly. More details on BATMAN are
given in (B.A.T.M.A.N. (better approach to mobile
ad-hoc networking), 2007). In the test scenarios of
the presented work, BATMAN version 0.2 is used
(https://www.open-mesh.net/batman).
3.2 Rerouting Time and Packet Loss
with Standard Parameter Settings
In (Zeiger et al., 2008), four different ad-hoc rout-
ing protocols were investigated with respect to mobile
robot tele-operation. A mobile robot was commanded
in a test scenario which forced the routing proto-
cols to increase the number of participating nodes in
the communication link while the robot was moved
around an obstacle. The four compared ad-hoc rout-
ing protocols were all used with the standard parame-
ter settings and behaved quiet different. While it was
Table 1: Packet Loss & Times for Route Reestablishing
from (Zeiger et al., 2008).
Protocol
Packet loss
during test run
Time for re-routing
min. max.
AODV 29.2% 2.1s > 30s
OLSR 14.2% 10.1s > 30s
DSR 11.2% 2.4s 2.7s
BATMAN conn. lost – –
not possible to accomplish the scenario with BAT-
MAN, the other protocols at least allowed a teleoper-
ation of the mobile robot – often with only very lim-
ited performance. AODV was originally designed for
highly dynamic networks. Routes are established on
demand. In some cases this rerouting took only a very
short time (cf. Table 1), but sometimes, the communi-
cation drop-out duration was longer than 30 seconds.
This is by far too long for the telecommand of a mo-
bile robot. Compared to AODV, the minimum of the
required re-routing time, OLSR is slower. Rarely, also
communication drop outs were observed. With only
half of the packet loss, OLSR showed a slightly better
performance as AODV. Although OLSR worked more
reliable than BATMAN or AODV, the observed mini-
mum time for re-routing of 10.1 seconds is quiet high
with respect to teleoperation and will not be appro-
priate for any kind of control via this network. DSR
showed to be the most reliable and the fastest proto-
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
56
col which was tested. A packet loss of about 11% and
a re-routing time between 2.4 and 2.7 seconds make
this protocol suitable for reliable telecommand of a
mobile robot. With respect to the test scenario, it was
expected that DSR performs best, as only one node
(the robot) is mobile and all other nodes are stationary.
Here, DSR discovers the topology quiet fast and only
the changes due to the robots movement result in rout-
ing messages. The used test scenario also represents
a worst case in the means of route redundancy due
to the availability of only one possible route between
controller and mobile robot. This could be the rea-
son for the relatively poor performance of AODV and
OLSR. Originally, these protocols were developed to
handle much larger networks with higher node mo-
bility and a higher grade of meshing as in the cur-
rent test scenario. Nevertheless, the presented test
scenario is quiet typical with respect to teleoperation.
In Table 1, also the average packet loss during route
reestablishing is given. Again DSR showed the best
performance (11.2% packet loss) compared to OLSR
(14.2% packet loss) and AODV (29.2% packet loss).
BATMAN was not able to establish a new route via
additional relay nodes.
0 20 40 60 80 100 120
0
1
2
3
4
5
6
7
Round Trip Time (ms)
Time (s)
Figure 4: Example for OLSR round trip times for scenario
1 with default parameter setting.
Figure 4 displays an example of the round trip
times for test scenario 1 and shows a clear communi-
cation drop out between 40 and 50 seconds test time.
In Figure 5 the behavior of DSR in the same scenario
is showed. Here, the communication drop-outs were
significantly shorter. The compared ad-hoc routing
protocols followed different principles (e.g. proactive
vs. reactive) and were designed by different inspira-
tions and for different application areas. Thus, they
have also different parameters with different default
settings, too. Nevertheless, this investigation showed
that a better performance is required for mobile robot
teleoperation. Based on these experiments, protocol
0 10 20 30 40 50 60 70
0
2
4
6
8
10
12
Round Trip Time (ms)
Time (s)
Figure 5: Example for DSR round trip times for scenario 1
with default parameter setting.
parameters are identified and tuned in order to in-
crease the quality of the communication. The results
are presented in the following sections.
4 PARAMETER TUNING
4.1 Variable Protocol Parameters
This section summarizes the default parameter set-
tings of the investigated ad-hoc routing protocols
OLSR (cf. Table 2), AODV, and BATMAN. In
(Zeiger et al., 2008), these settings were chosen as a
trade-off between generated routing overhead and fast
topology discovery. Unfortunately, these parameter
settings for OLSR, AODV, and BATMAN showed to
be not suitable to use these ad-hoc routing protocols
for mobile robot tele-operation.
Table 2: Variable parameters for OLSR.
Name: Default Value
Willingness dyn. calc.
LinkQualityLevel 2
LinkQualityWinSize 10
Pollrate 0.05 sec
TcRedundancy 0
HelloInterval 2 sec
HelloValidity 6.0 sec
TCInterval 5 sec
TCValidity 15.0 sec
For AODV, relevant parameters are ”force gratu-
itous”, ”local repair”, and ”no wait on reboot ” which
are disabled by default. The BATMAN protocol of-
fers less possibilities for parameter changes. In the
PARAMETER TUNING OF ROUTING PROTOCOLS TO IMPROVE THE PERFORMANCE OF MOBILE ROBOT
TELEOPERATION VIA WIRELESS AD-HOC NETWORKS
57

following sections, ”originator interval” will be used
for optimization. By default, ”originator interval” is
set to 1000 milliseconds.
4.2 OLSR
To increase the performance of OLRS in order to use
it for mobile robot teleoperation, the four parameters
were changed as shown in Table 3. As the param-
eter settings are interdependent, some simple rules
must be followed as not all combinations of values are
useful. The hello- and tc-intevals have to be smaller
than half the corresponding validity times. Of course,
the traffic for routing will be increased due to more
hello and tc-messages but will not cause decrease the
throughput significantly.
Table 3: Tuned parameters for OLSR.
Name: Default Value: New Value:
HelloInterval 2 sec 0.5 sec
HelloValidity 6 sec 1.5 sec
TcInterval 5 sec 2.5 sec
TcValidityTime 15 sec. 5.0 sec
The rerouting time was reduced from more than
10.1 to an average value of 5.96 seconds (with a
minimum of 5.2 and a maximum of 7.4) for includ-
ing the first relay node into the communication link.
The packet loss during rerouting was reduced from
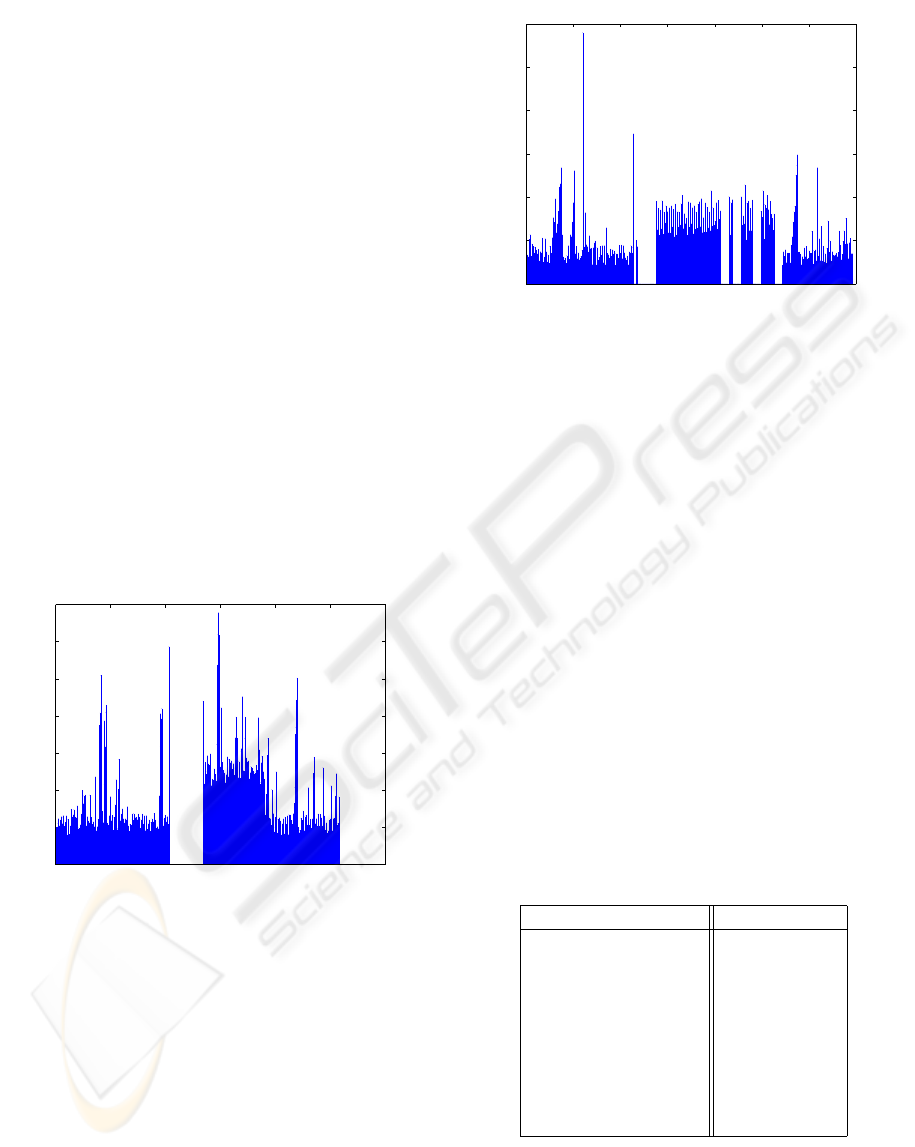
14.2% to 4%. Figure 6 shows an example of the be-
havoir of the round trip time during a rerouting pro-
cess with OLSR. As the rerouting is initiated at 32.4
seconds, a short communication drop out occurred
until the link is reestablished at 37.2 seconds simu-
lation time. Thus, the OLSR performance could be
increased but still, the observed performance of DSR
during the comparison in (Zeiger et al., 2008) could
not be reached.
4.3 BATMAN
As already mentioned, the number of variable param-
eters for BATMAN is very small. A suitable parame-
ter to be tuned is the ”originator interval”, which is the
time to wait sending one message and before the bat-
man daemon sends the next message (default value is
1000 milliseconds). In (Zeiger et al., 2008), all BAT-
MAN test runs ended up in a communication loss.
Now, the value for ”originator interval” is decreased
which should result in a faster response on topology
changes by the routing protocol. Figure 7 shows an
Example of a test run with ”originator interval” set to
125 ms. Of course, this setting increases the routing
0 20 40 60 80 100
0
2
4
6
8
10
12
Round Trip Time (ms)
Time (s)
Figure 6: Example for OLSR round trip times for scenario 1
with HelloInterval=0.5, HelloValidity=1.5, TCInterval=2.5
and TCValidity=5.0.
overhead but as a result, BATMAN now can handle
the rerouting without losing the communication. Dur-
ing the tests, the average rerouting duration is 7.78
seconds with a packet loss of 8%. This parameter set-
ting significantly improved the performance of BAT-
MAN but still, the duration of the rerouting procedure
takes too long to be used for mobile robot teleopera-
tion.
0 10 20 30 40 50 60 70 80 90
0
2
4
6
8
10
12
14
16
18
20
Round Trip Time (ms)
Time (s)
Figure 7: Example for BATMAN with ”originator interval”
set to 125 ms.
4.4 AODV
For AODV, it is possible to tune several parameters.
The performed tests showed, that only an combined
change of several parameters might have the oppor-
tunity to show a positive effect with respect to tele-
operation. Unfortunately, it was not possible to find
a suitable parameter setting – all combinations made
the protocol behaving very unstable. For example, en-
abling ”force gratuitous”, ”local repair”, ”no wait on
reboot”, and setting ”treat node as neighbor” to 2 (cf.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
58
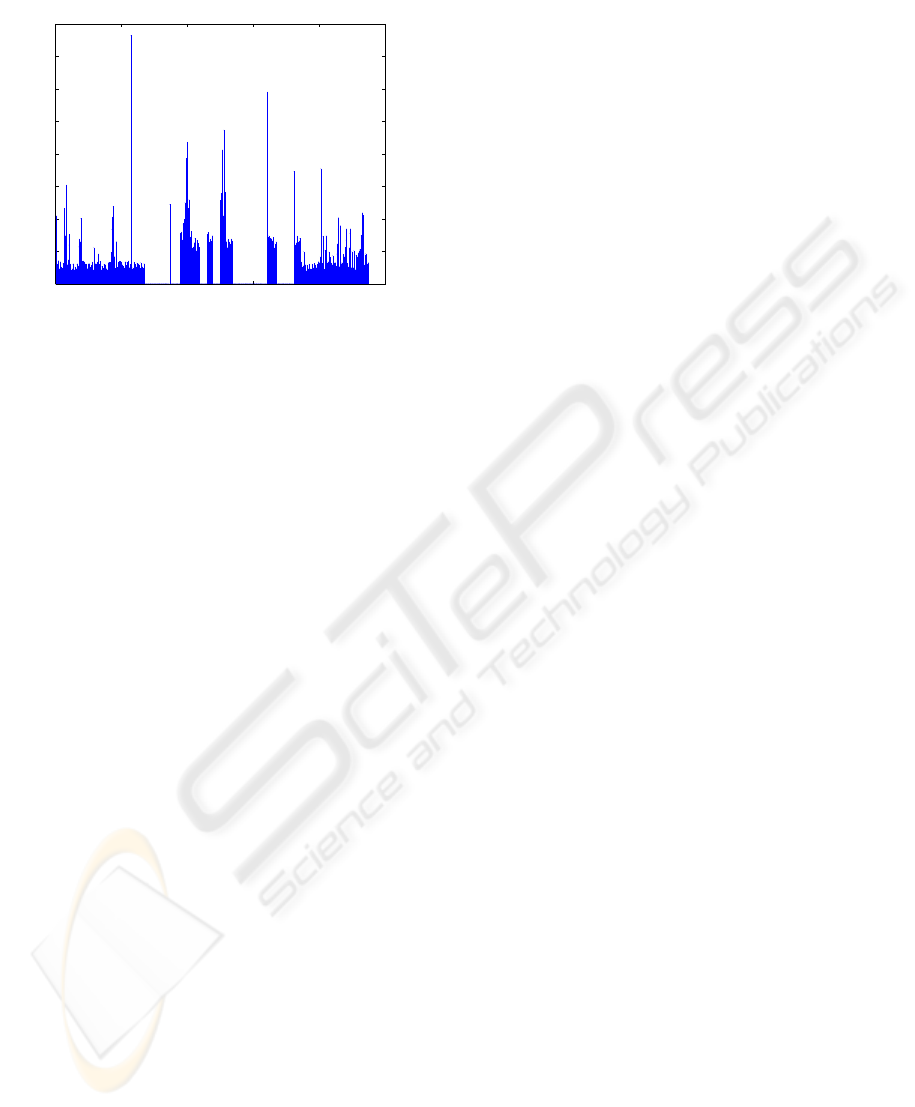
Figure 8) lead to many communication losses.
0 20 40 60 80 100
0
2
4
6
8
10
12
14
16
Round Trip Time (ms)
Time (s)
Figure 8: Example for AODV with ”force gratuitous”, ”lo-
cal repair”, and ”no wait on reboot” enabled and ”treat node
as neighbor” = 2.
5 CONCLUSIONS
This work uses results of a comparison of four ad-hoc
routing protocols as a basis where the default param-
eter setting showed to be not appropriate for mobile
robot teleoperation. Here, results of a study for pa-
rameter tuning of real implementations of the ad-hoc
routing protocols OLSR, AODV, and BATMAN are
presented. Real hardware tests of a mobile robots
teleoperation scenarios were performed and the be-
havior of the communication link was analyzed with
respect to mobile robot teleoperation. It is shown,
that a tuning of a combination of relevant parame-
ters for OLSR can improve its performance. Also the
reduction of originator interval” of BATMAN results
in a more reliable network than experienced with the
default parameter settings. For AODV, sometimes a
better reaction in terms of required time for rerout-
ing could be observed. The evaluated protocol im-
plementations are suitable for some teleoperation ap-
proaches – e.g. systems with local autonomy func-
tions to ensure a defined behavior of the mobile robot
during the rerouting times. Nevertheless, the behav-
ior of all tested ad-hoc routing implementations was
less than expected. The previously mentioned simula-
tion results showed much shorter rerouting times (in a
magnitude of some milliseconds). These short rerout-
ing times were never observed in the presented real
hardware tests. Future work will now be focused on a
detailed analysis of the differences between the simu-
lation studies and the effects described in this work to
further improvement the usability of AODV, OLSR,
DSR, and BATMAN for mobile robot teleopertation
or remote control approaches via wireless multi-hop
networks. In addition, the required interaction be-
tween applications (e.g. teleoperation interfaces or
control algorithms) and the network status via the
lower protocol layers must be analyzed.
REFERENCES
B.A.T.M.A.N. (better approach to mobile ad-hoc network-
ing) (2007). https://www.open-mesh.net/batman, vis-
ited 2007/09/07.
Broch, J., Maltz, D. A., Johnson, D. B., Hu, Y.-C., and
Jetcheva, J. (1998). A Performance Comparison of
Multi-Hop Wireless Ad Hoc Network Routing Proto-
cols. In Mobile Computing and Networking, pages
85–97.
Chakeres, I. D. and Belding-Royer, E. M. (2004). AODV
Routing Protocol Implementation Design. In Proceed-
ings of the International Workshop on Wireless Ad hoc
Networking (WWAN), Tokyo, Japan, pages pp. 698–
703.
Clausen, P. J. T. (2003). RFC 3626, Optimized link state
routing protocol (OLSR). IETF, Network Working
Group.
DARPA Internet Program (1981). RFC 791, Internet Proto-
col Specification.
Das, A., Spletzer, J., Kumar, V., and Taylor, C. (2002). Ad
Hoc Networks for Localization and Control. In Pro-
ceedings of the 41st IEEE Conference on Decision and
Control, (CDC 2002), volume 3, pages 2978–2983.
Das, S., Perkins, C. E., and Belding-Royer, E. M. (2003).
Ad hoc On-Demand Distance Vector (AODV) Rout-
ing. IETF RFC 3561.
Das, S. R., Perkins, C. E., Royer, E. M., and Marina, M. K.
(2001). Performance Comparison of Two On-demand
Routing Protocols for Ad hoc Networks. IEEE Per-
sonal Communications Magazine special issue on Ad
hoc Networking, February 2001:16–28.
Dyer, T. D. and Boppana, R. V. (2001). A comparison of
TCP performance over three routing protocols for mo-
bile ad hoc networks. In Proceedings of the 2nd ACM
International Symposium on Mobile Ad Hoc Network-
ing & Computing, Long Beach, CA, USA, pages 56–
66.
Eck, D., Stahl, M., and Schilling, K. (2007). The Small
Outdoor Rover MERLIN and its Assistance System
for Tele-Operations. In Proceedings of International
Conference on Field and Service Robotics (FSR),
Chamonix (France).
Hsieh, M. A., Cowley, A., Kumar, V., and Taylor., C.
(2006). Towards the deployment of a mobile robot
network with end-to-end performance guarantees. In
Proceedings of the IEEE International Conference on
Robotics and Automation (ICRA’06), Orlando, FL
(USA), pages 2085–2090.
Hu, Y.-C., Johnson, D. B., and Maltz., D. A. (2004). The
Dynamic Source Routing Protocol (DSR) for Mobile
Ad Hoc Networks for IPv4. IETF MANETWorking
Group, IETF RFC 4728.
PARAMETER TUNING OF ROUTING PROTOCOLS TO IMPROVE THE PERFORMANCE OF MOBILE ROBOT
TELEOPERATION VIA WIRELESS AD-HOC NETWORKS
59

Johansson, P., Larsson, T., Hedman, N., Mielczarek, B.,
and Degermark, M. (1999). Scenario-based Perfor-
mance Analysis of Routing Protocols for Mobile Ad-
hoc Networks. In Proceedings of Mobicom’99, Seat-
tle, Washington.
Johnson, D. B. and Maltz, D. A. (1996). Dynamic Source
Routing in Ad-Hoc Wireless Networks. Mobile Com-
puting, 353.
Kiess, W. and Mauve, M. (2007). A Survey on Real-World
Implementations of Mobile Ad-Hoc Networks. Else-
vier’s Ad Hoc Networks, 5(3):324–339.
Nguyen, H. G., Pezeshkian, N., Gupta, A., and Farring-
ton, N. (2004). Maintaining Communication Link for
a Robot Operating in a Hazardous Environment. In
Proceedings of ANS 10th International Conference on
Robotics and Remote Systems for Hazardous Environ-
ments, Gainesville, Florida, March 28-31.
Nguyen, H. G., Pezeshkian, N., Raymond, M., Gupta, A.,
and Spector, J. M. (2003). Autonomous Communi-
cation Relays for Tactical Robots. In The 11th Inter-
national Conference on Advanced Robotics, Proceed-
ings of ICAR 2003, Coimbra, Portugal, June 30 - July
3.
Pezeshkian, N., Nguyen, H. G., and Burmeister, A. (2006).
Unamnned Ground Vehicle Non-Line-of-Sight Oper-
ations Using Relaying Radios. In Proceedings of the
12th IASTED International Conference on Robotics
and Applications, Honolulu, Hawaii (USA).
Pezeshkian, N., Nguyen, H. G., and Burmeister, A. (2007).
Unmanned Ground Vehicle Radio Relay Deployment
System for Non-Line-Of-Sight Operations. In Pro-
ceedings of the 13th IASTED International Confer-
ence on Robotics and Applications, Wuerzburg (Ger-
many).
Redi, J. and Welsh, R. (1999). Energy-Conservation for
Tactical Mobile Robots. In Proceedings of Military
Communications Conference, MILCOM.
Rooker, M. N. and Birk, A. (2005). Combining Explo-
ration and Ad-Hoc Networking in RoboCup Rescue.
In Nardi, D., Riedmiller, M., and Sammut, C., editors,
RoboCup 2004: Robot Soccer World Cup VIII, vol-
ume 3276 of Lecture Notes in Artificial Intelligence
(LNAI), pages 236–246. Springer.
Rooker, M. N. and Birk, A. (2007). Multi-robot exploration
under the constraints of wireless networking. Control
Engineering Practice, 15(4):435–445.
Zeiger, F., Kraemer, N., and Schilling, K. (2008). Com-
manding Mobile Robots via Wireless Ad-Hoc Net-
works - A Comparison of Four Ad-Hoc Routing Pro-
tocol Implementations. In Proceedings of the IEEE
International Conference on Robotics and Automation
(ICRA’08).
Zeiger, F., Selbach, C., Ruderisch, B., and Schilling, K.
(2007). An Application Protocol to Integrate a Small
Size Helicopter into an IP based Ad-Hoc Network. In
Proceedings of ROBOCOMM 2007, Athens (Greece).
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
60
