
Comparison of Defuzzification Methods: Automatic
Control of Temperature and Flow in Heat Exchanger
Carlos A. Cosenza
1
, Alvaro J. Rey Amaya
2
, Omar Lengerke
3
, Max Suell Dutra
3
and Magda J. M. Tavera
2
1
Production Engineering, COPPE, Federal University of Rio de Janeiro – UFRJ
Cidade Universitária - CT, Bloco F, sala 108 - Ilha do Fundão
Rio de Janeiro, RJ – Postal Box: 68507, Brazil
2
Energy and Automation Laboratory, Autonomy University of Bucaramanga – UNAB
Calle 48 Nr. 39 -234, Bucaramanga - Colombia
3
Robotic and Automation Laboratory – COPPE/UFRJ
Federal University of Rio de Janeiro – UFRJ
Postal Box 68.503 – CEP 21.945-970 – Rio de Janeiro, RJ, Brazil
Abstract. The objective of this work is to analyze the behavior of the tradi-
tional control and the fuzzy control, applying them in the flow and temperature
control to the load of current of a heat exchanger, as well as the analysis of dif-
ferent methods of defuzzification, utilized just as itself this carrying out the
fuzzy control. Acting on the structure of the fuzzy controller some changes of
form are carried out such that this tune in to be able to obtain the answer but
optimum. In the same way proceeds on the traditional controller, and in this
way comparisons on these two types of controls are established. Inside the
changes that are carried out on the fuzzy controller this form of defuzzification
the information, that is to say the methods are exchanged defuzzification in or-
der then to realize comparisons on the behavior of each one of these.
1 Introduction
In many of the sectors of the industry where include itself thermal processes, is im-
portant the presence of a heat exchanger [1] [2]. Said processes do part of the every-
day life of an engineer that has as field of action the control, therefore is considered
interesting to realize a control to this type of tools. This work in its content studies
two large aspects: A comparison between the traditional control and the fuzzy con-
trol, and an analysis between some of the different methods of defuzzification that are
utilized in the fuzzy logic [3], doing an analysis of each one of they taking in consid-
eration contribute them that other authors have done and leaving always in clear, that
the alone results obtained will be applicable al moment of doing control on an ex-
changer of heat [4]. The system this composed one for two exchangers of heat [5],
one of concentric pipes and the other of hull and pipes, to which implemented them
an automatic control of the temperature and the flow to the load of the current of
heating (Fig. 1).
A. Cosenza C., J. Rey Amaya A., Lengerke O., Suell Dutra M. and J. M. Tavera M. (2008).
Comparison of Defuzzification Methods: Automatic Control of Temperature and Flow in Heat Exchanger.
In Proceedings of the 4th International Workshop on Artificial Neural Networks and Intelligent Information Processing, pages 107-116
DOI: 10.5220/0001490701070116
Copyright
c
SciTePress
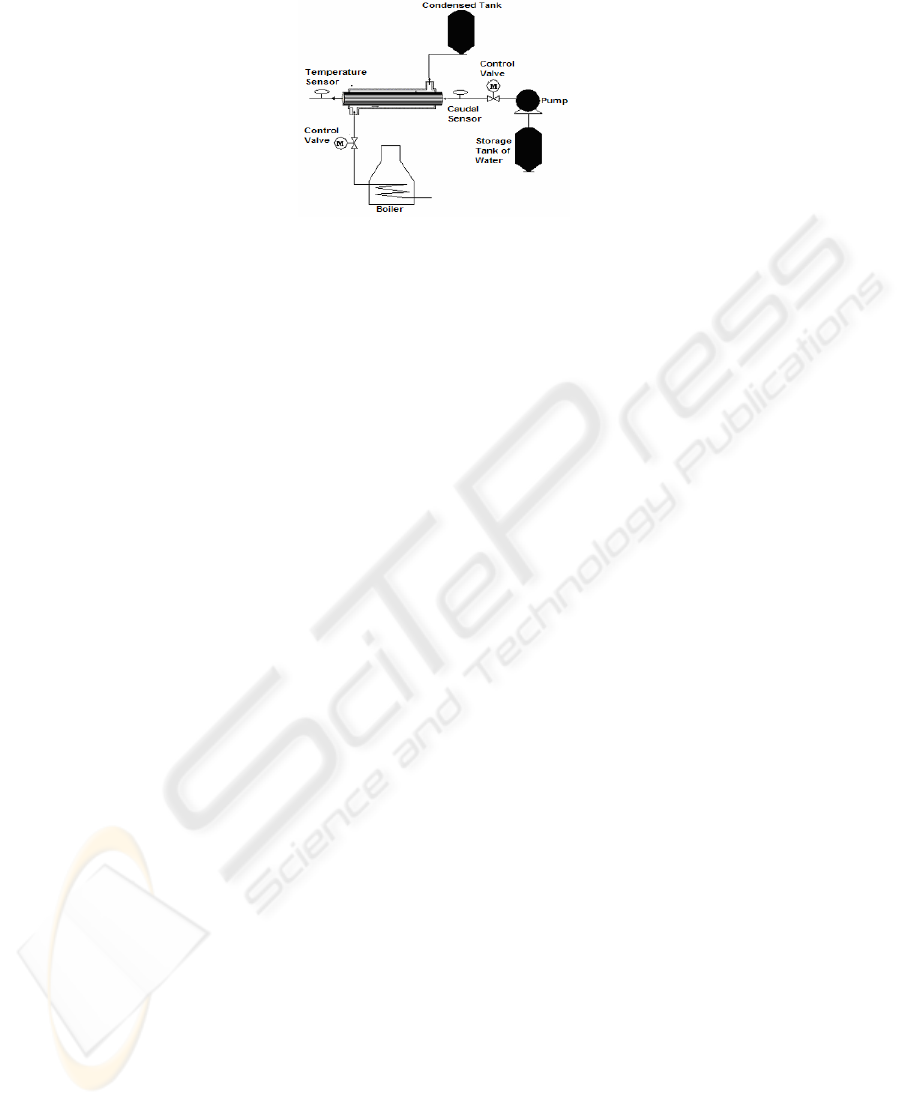
Fig. 1. Assembly of the system.
This control is realized through two proportional valves, one to the input of the water,
that is the responsible for maintaining the value of order of the water and the other
installed in the line of input of the vapor (source of heat), that is responsible of main-
taining the quantity of necessary vapor to obtain the target temperature. The meas-
urement of the flow [6] is realized by means of a sensor of rotary palette and the
measurement of the temperature by means of thermocouples [7] [8] [9]. The signals
supplied by these sensors are acquired by means of the FieldPoint systems of Na-
tional Instruments [10], the same one that takes charge of sending the signal to the
valves of control, after to be processed the data by the controller [11].
2 Software of Fuzzy and Classic Control
The software of control designed, is formed of two sections, the program of fuzzy
control, and the program of the PID (Proportional/Integral/ Derivative) control. These
controllers are elaborate in environment Labwindows/CVI, software of the company
National Instruments, which permits to realize the pertinent operations with the data
captured through the modules of FieldPoint, and that, are utilized in the control of the
system. The fuzzy control interface, is the responsible for taking the data of the sen-
sors, so much of temperature, for the case of the control of temperature, as of the
sensor of flow, for the control of the same one, to process, and according to an order
established, to determine an response, which is sent to the actuators. Basically, this
program is responsible of: to schematize the fuzzy sets, according to established by
the user, defuzzification of the inputs, to realize the inference of these inputs in the
rules, to realize the aggregation in the outputs sets, and to execute the process of de-
fuzzification, to determine the response that help to the system to obtain the stable
state. The program of the classic control PID, is the responsible for taking the data of
the sensors, so much of temperature, for the case of the control of temperature, as of
the sensor of flow, for the control of the same one, to process, and according to an
order established, to determine an response, which is sent to the actuators. Basically,
this program is entrusted of to execute the three actions of control, proportional, de-
rivative and integral to determine the responses that help to the system to obtain its
target state. The PID control system general is represented in figure 2, where R(s), is
the signal target or set point, U(s), is the output of the PID controller that goes toward
108

the plant G(s), and Y(s), is the value taken of the variable to control, which reduces to
the reference and the error is determined (controller input).
Fig. 2. System of Control PID.
The control of Temperature, have as an objective to obtain that the water that the
exchanger of heat leaves achieve the value of the target temperature and then to keep
it in the value even with external disruptions. That is to say, should operate on the
valve of control who is the one that supplies the quantity of vapor that heats the wa-
ter. The input to this system of control will be the error of temperature, obtained since
the thermocouple placed on the exit of the exchanger, and the exit will control the
quantity of necessary current to open or to close the proportional valve (Plant). This
control is realized through a PID controller. The flow control has as an objective to
obtain that the mass flow of water that enters to the exchanger of heat, achieve the
target value, and can to keep it during its operation, and even with disruptions. This
means that should operate on the valve of control, who is the one that strangles the
quantity of water that enters to the system. The input of the system will be the error
obtained through the sensor of flow installed in the input of the system, and the PID
controller will control the quantity of necessary current to manipulate the proportional
valve. Both processes begin, calculating the difference between the measured tem-
perature and the temperature target or of the flow measured and the flow desired. In
this form, know the error. Then, the values of the parameters of control are taken, and
the output is calculated that goes toward the plant. This output, will obtain values
since 0 to 20 mA, they will represent angles of opening of the proportional valve.
3 System of Fuzzy Control
The input to this system of control will be the error of temperature and the gradient,
obtained since the sensor placed on the way out of the exchanger, and the exit will
control the quantity of necessary current to open the proportional valve. The rules of
the system and function of membership are obtained in the table 1 and figure 3, re-
spectively.
Table 1. Temperature control rules assembly.
Error
Δ Error
Negative Zero Positive
Negative
Open Open Not operation
Zero
Open Not operation Close
Positive
Not operation Close Close
109

Functions of membership for
the current at the outset
Functions of membership for the
variable derived from the Error
Functions of membership or the
variable Error
Fig. 3. Functions of membership temperature control.
The control of flow has as objective to obtain that the mass flow of water that enters
to the exchanger of heat, achieve the value of order, and can to keep it during its
operation, and even before disruptions. This means that should act on the valve of
control who is the one that strangles the quantity of water that enters to the system.
The input of the system, they will be the error obtained through the sensor of flow
installed to the entrance of the system, and the change of the error in the time, and the
output will control the quantity of necessary current to manipulate the proportional
valve. Both processes begin, calculating the difference between the measured tem-
perature and the temperature desired, or of the flow measured and the flow desired. In
this form know the Error. Then, calculate the gradient, reducing the new error of the
previous one. Once known these variables, that constitute the inputs of the fuzzy
logic controller, proceeds to realize the fuzzification, the inference and the defuzzifi-
cation to obtain the output of the controller. This output, will obtain values since 0 to
20 mA, who will represent angles of opening of the proportional valve. The rules of
the system and function of membership are obtained in the table 2 and figure 4, re-
spectively.
Table 2. Flow control rules assembly.
Error
Δ Error
Negative Zero Positive
Negative
Close Close Not operation
Zero
Close Not operation Open
Positive
Not operation Open Open
Functions of membership for the
variable Error
Functions of membership for the
variable derived from the Error
Functions of membership for
the current at the outset
Fig. 4. Functions of membership flow control.
110

3.1 Comparative Results between the Methods of Defuzzification
Implemented
The methods of defuzzification chosen were five; these are know in the area of the
control by the names, central gravity weighted by the height, central gravity weighted
by the area, average of centers, points of maximum criterion weighted by the height
and points of maximum criterion weighted by the area. When refers to the control of
a system, the main term on which refers is to the stability that this can offer, for this is
necessary to take into consideration, the time that delayed the system in being stabi-
lized, the margin of error between the value desired, (Vc), and the values of stabiliza-
tion, (Ve) of the system and the influence of the inertia of the system. For the tests of
temperature and flow control, is defined a set point of 25 [Lts / min] and 40 [ºC]. The
parameters and equations used are observed in the table 3 and the table 4 the different
responses are shown in each one of the methods, according to the parameters estab-
lished in the table 3.
Table 3. Methods and models of defuzzification.
METHODS EQUATIONS
1. Central gravity weighted
by the height
∑
∑
=
=
=
n
i
i
n
i
ii
h
wh
x
1
1
*
Where, w is the center gravity of the
resultant assembly after realized the
fuzzy operation chosen, and h is the
height of the same assembly.
2. Central gravity weighted
by the area.
∑
∑
=
=
=
n
i
i
n
i
ii
s
ws
x
1
1
*
Where, w is the center gravity of the
resultant assembly after realized the
fuzzy operation chosen and s is the
area of the same assembly.
5. Points of maximum
criterion weighted by the
area.
∑
∑
=
=
=
n
i
i
n
i
ii
s
Gs
x
1
1
*
Where, G is the point of maximum
criterion of the resultant set after to
realize the fuzzy4 operation chosen
and s is the area of the same set.
3. Points of maximum
criterion weighted by the
height.
∑
∑
=
=
=
n
i
i
n
i
ii
h
Gh
x
1
1
*
Where, G is the point of maximum
criterion of the resultant set after to
realize the fuzzy operation chosen and
h is height of the same set.
4. Average of centers
Where y
-l
represents the center of the
fuzzy set G
l
(defined as the point V in
which μ
G
l
(y) reaches its value maxi-
mum), and μ
B
(y) this defined for the
degrees of membership resultant of the
fuzzy inference.
()
`
1
`
1
(())
()
M
ll
B
l
M
l
B
l
yy
y
y
μ
μ
−−
=
−
=
=
∑
∑
111

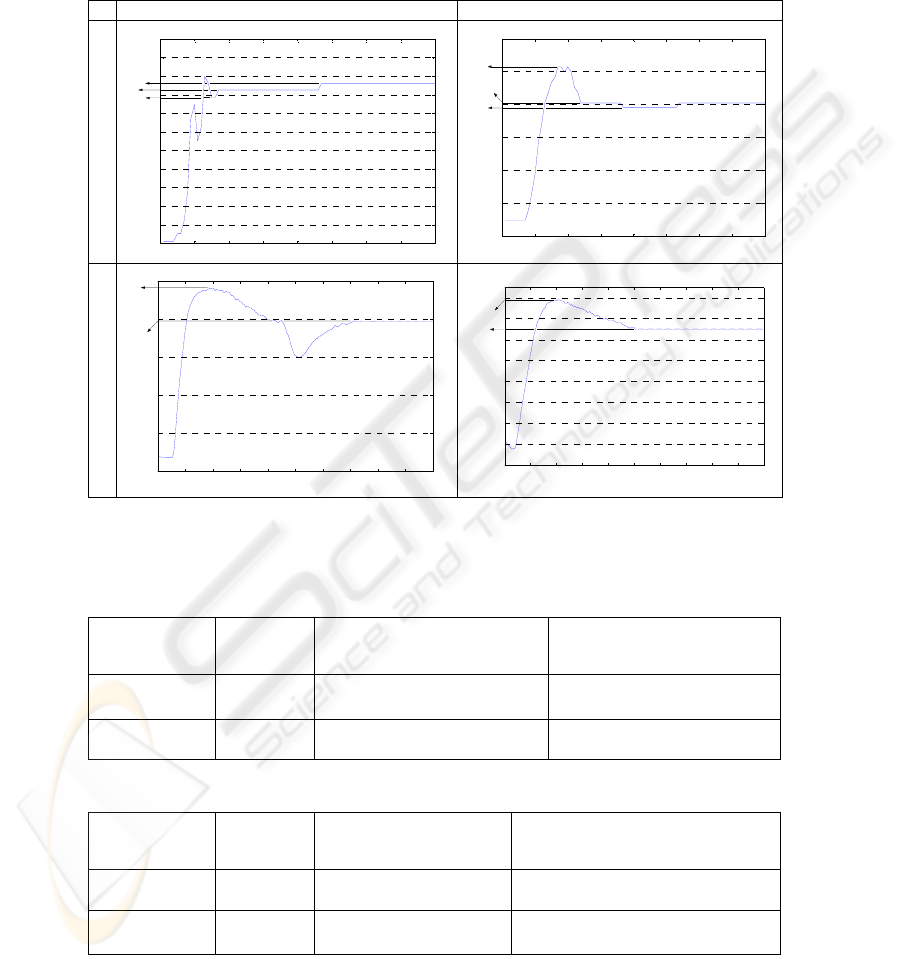
Table 4. Response in each one of the methods established.
FLOW CONTROL
0 10 20 30 40 50 60 70 80
0
5
10
15
20
25
30
Centro de gravedad ponderado por la altura
Ciclos de 5 seg
Caudal [ Lt s / min ]
25.2
24.5
22.9
Central gravity weighted by the height
0 10 20 30 40 50 60 70 80
8
10
12
14
16
18
20
22
24
26
28
Centro de gravedad ponderado por el area
Ciclos de 5 s e
g
Caudal [ Lts / min ]
26.8
23.7
25.2
25.2
24.5
Central gravity weighted by the area
0 10 20 30 40 50 60 70 80
8
10
12
14
16
18
20
22
24
26
28
30
Media de c entros
Ciclos de 5 seg
Caudal [ Lts / min ]
25.2
24.5
23.7
Average of centers
0 10 20 30 40 50 60 70 80
0
5
10
15
20
25
Puntos de maximo criterio ponderados por la altura
Ciclos de 5 seg
Caudal [ Lts / min ]
25.2
24.5
23.7
Points of maximum criterion weighted by the
height
0 10 20 30 40 50 60 70 80
0
5
10
15
20
25
30
Puntos de maximo criterio ponderados por el area
Ciclos de 5 seg
Caudal [ Lts / min ]
25.2
24.5
Points of maximum criterion weighted by the area.
112

Table 4. Response in each one of the methods established (continued).
TEMPERATURE CONTROL
0 20 40 60 80 100 120 140 160 180 200
20
25
30
35
40
45
50
Centro de gravedad ponderado por la altura
Ciclos de 5 s eg
Temperatura [ ºC ]
35.37
39.7
46.358
Central gravity weighted by the height
0 20 40 60 80 100 120 140 160 180 200
20
25
30
35
40
45
Centro de gravedad ponderado por el area
Ciclos de 5 se
g
Temperatura [ ºC ]
44.49
34.187
Central gravity weighted by the area
0 20 40 60 80 100 120 140 160 180 200
20
25
30
35
40
45
Media de centros
Ciclos de 5 seg
Temperat ura [ ºC ]
44.086
39.6
Average of centers
0 20 40 60 80 100 120 140 160 180 200
25
30
35
40
45
Puntos de maximo criterio ponderados por la altura
Ciclos de 5 seg
Temperat ura [ ºC ]
39.7
44.21
38.482
Points of maximum criterion weighted by the
height
0 20 40 60 80 100 120 140 160 180 200
20
25
30
35
40
45
50
Puntos de maximo c rit erio ponderados por el area
Ciclos de 5 seg
Temperatura [ ºC ]
45.922
39.447
35.837
Points of maximum criterion weighted by the area
A summary of the results obtained in the different methods is shown in the table 5 for
the control of flow and the table 6 for the control of temperature.
113

Table 5. Response of the methods of defuzzification in the control of flow.
Defuzzification
Method
Time of
stability
[sec]
Margin of error
(Vc - Ve)
Influence of the inertial of
system
Central gravity
weighted by the
height
105
0.8% above of the set point
2% underneath of the set point
0.8% above of the set point
8.4% underneath of the set
point
Central gravity
weighted by the
area
125
0.8% above of the set point
2% underneath of the set point
7.2% above of the set point
5.2% underneath of the set
point
Average of
centers
85
0.8% above of the set point
2% underneath of the set point
4% above of the set point
5.2% underneath of the set
point
Points of maxi-
mum criterion
weighted by the
height
230 2% underneath of the set point
0.8% above of the set point 5.2%
underneath of the set point
Points of maxi-
mum criterion
weighted by the
area
120
0.8% above of the set point
2% underneath of the set point
0.8% above of the set point
2% underneath of the set point
Table 6. Response of the methods of defuzzification in the control of temperature.
Defuzzification
Method
Time of
stability
[sec]
Margin of error
(Vc - Ve)
Influence of the inertial of
system
Central gravity
weighted by the
height
670
0.75% underneath of the
set point
40.895% above of the set point
11.575% underneath of the
set point
Central gravity
weighted by the area
Not stabi-
lized
Not stabilized
11.25% above of the set point
14.5325% underneath of the
set point
Average of centers
710
1% underneath of the
set point
10.215% above of the set point
12.5% underneath of the set point
Points of maximum
criterion weighted
by the height
745
0.75% underneath of the
set point
10.525% above of the set point
3.795% underneath of the
set point
Points of maximum
criterion weighted
by the area
735
1.38% underneath of the
set point
14.805% above of the set point
10.4075% underneath of the
set point
3.2 Comparative Analysis between the Classic Controller and Fuzzy
Controller
To be able to realize this analysis should make use of concepts that be fundamental at
the moment of to evaluate the efficiency of a controller. The concepts to take into
consideration in this case are, the time that delayed the system in being stabilized,
margin of error between the value of order, (Vc), and the values of stabilization (Ve),
114
of the system and the Influence of the inertia of the system. For the comparative
analysis between the fuzzy controller and the PID controller in the control of flow
made use of the tests realized to each one of these controllers, with a set point of 25
[Lts / min] and 40 [ºC]. The results obtained are shown in the table 7.
Table 7. Response of the controllers.
FUZZY CONTROLLER PID CONTROLLER
FLOW CONTROL
0 10 20 30 40 50 60 70 8
0
8
10
12
14
16
18
20
22
24
26
28
30
Media de c entros
Ciclos de 5 seg
Caudal [ Lts / min ]
25.2
24.5
23.7
0 10 20 30 40 50 60 70 80
5
10
15
20
25
30
35
Control PID
Ciclos de 5 seg
Caudal [ Lts / min ]
25.2
24.5
30.7
TEMPERATURE CONTROL
0 20 40 60 80 100 120 140 160 180 200
20
25
30
35
40
45
Media de cent ros
Ciclos de 5 seg
Temperatur a [ ºC ]
44.086
39.6
0 20 40 60 80 100 120 140 160 180 200
26
28
30
32
34
36
38
40
42
Control PID
Cicl os de 5 s eg
Temperatura [ ºC ]
41.782
38.9
A summary of the results obtained in the different methods is shown in the table 8 for
the control of flow and the table 9 for the control of temperature.
Table 8. Response of the methods of defuzzification in the control of flow.
Controller
Time of
stability
[sec]
Margin of error
(V
c
- V
e
)
Influence of the inertial
of system
FUZZY
CONTROL
85
0.8% underneath of the set point
2% above of the set point
4% underneath of the set point -
5.2% above of the set point
PID CONTROL 115
0.8% underneath of the set point
2% above of the set point
22.8% underneath of the set
point 2% above of the set point
Table 9. Response of the methods of defuzzification in the control of temperature.
Controller
Time of
stability
[sec]
Margin of error
(V
c
- V
e
)
Influence of the inertial of system
FUZZY
CONTROL
710
1% underneath of the set
point
10.215% above of the set point
12.5% underneath of the set point
PID CONTROL 505
2.75% underneath of the
set point
4.455% above of the set point
2.75% underneath of the set point
115

4 Conclusions
The results obtained in this work show the technical viability of the utilization of the
fuzzy logic in the control of flow and temperature to the warming-up current input of
an exchanger of heat. With respect to the control of flow and temperature implement-
ing fuzzy logic, can tell that possesses the advantages of need not a mathematical
model of precision of the control system. As disadvantage can tell itself, that the de-
sign should be realized generally with the method of test and error. Is possible to
control through fuzzy techniques industrial process, with the greater facility and with
the minimum of errors, suffices with knowing its general behavior to structure a se-
ries of fuzzy sets and its respective rules. The tuning of the fuzzy controller, besides
depending on the rules matrix, also, depends on the size of the sets of the variable,
already itself of input or output. This depends on the same behavior of the system.
For the implementation of a fuzzy control, is necessary, the establishment of the
methods and alternatives utilized in each one of the blocks that conform it. In this
form, can be obtained best results, at the moment of the tuning of the system. The
answer of the fuzzy controller does not depend on the method of defuzzification util-
ized, if not of the adequate utilization of the functions of membership, and of the
numbers of linguistic variables utilized for each one of the variables of input and
output of the system. Also, depends on the type and of the size of the sets utilized.
References
1. Ruan, D.: Fuzzy Logic Foundations and Industrial Applications. International Series in
Intelligent Technologies. Kluwer Academic Publishers, Boston (1996).
2. Harris, J.: An introduction to fuzzy logic applications. Kluwer Acad. Pub., Boston (2000).
3. Ruan D. and Huang C.,: Fuzzy sets and fuzzy information-granulation theory: key selected
papers by Lotfi A. Zadeh. International Series on Advances in Fuzzy Mathematics and En-
gineering. Beijing Normal University Press, Beijing (2000).
4. Alotaibi, M., Sen, B., Goodwine and Yang, K.T.: Controllability of cross-flow heat ex-
changer. Int. J. Heat Mass Transfer 47, (2004) 913–924.
5. Xia, L., De Abreu-Garcia, J.A. and Hartley, T.T.: Modeling and simulation of a heat ex-
changer. IEEE International Conference on Systems Engineering. (1991) 453–456.
6. McMillan, G.K.; Considine, D.M.: Process / Industrial Instruments and Controls Hand-
book. 5th Edition, McGraw-Hill, New York, USA (1999).
7. Youden, W. J.: Experimentation and Measurement. Dover Publications. Mineola, New
York. (1998).
8. Morris, A. S.: Measurement and Instrumentation Principles, Third Edition, Butterworth-
Heinemann, Great Britain (2001),
9. Michalski, L., Eckersdorf, K., Kucharski, J., and McGhee, J.: Temperature Measurement.
2nd edition, John Wiley, England (2001).
10. Archila, J.F., Dutra, M.S., Lengerke, P. O. and Vega, T.J.: Design and implementation of a
control system in closed-loop using the communication system FIELD POINT for a hydro-
static transmission. Published in RESET: Journal Specialized in informatics and electronics
systems of Telecommunications Systems. Vol.1, (2006) 48–53.
11. Park, J. and Mackay S.: Practical Data Acquisition for Instrumentation and Control Sys-
tems. Newnes Elsevier. Great Britain (2003).
116
