
VIDEO
TRANSMISSION WITH ADAPTIVE QUALITY BASED ON
NETWORK FEEDBACK FOR MOBILE ROBOT TELEOPERATION
IN WIRELESS MULTI-HOP NETWORKS
Florian Zeiger, Markus Sauer and Klaus Schilling
University of Wuerzburg, Department of Robotics and Telematics, Am Hubland, Wuerzburg, Germany
Keywords:
Networked robots, mobile robot teleoperation, mobile robot ad-hoc networks, wireless network, ad-hoc net-
work, wireless teleoperation, wireless remote control.
Abstract:
A video stream is still one of the most important data sources for the user while remote-operating a mobile
robot. Human operators have comprehensive capabilities to interpret the displayed image information, but
therefore, some constraints must be fulfilled. Constant frame rates and delays below a certain threshold are a
minimum requirement to use video for teleoperation. Modern multi-hop networks often use WLAN to set up
ad-hoc networks of mobile nodes with each node acting as traffic source, sink, or router. Considering these
networks, routes between sources and destinations might be established via several relay nodes. Thus, the
utilization of intermediate nodes which are part of a route influences the overall route performance, whereas
sender and receiver have no direct feedback of the overall route status. In case video is transmitted via wireless
ad-hoc networks in a teleoperation scenario, the displayed video-stream for the operator might have variable
frame rates, very high packet loss, and packet inter-arrival times which are not appropriate for mobile robot
teleoperation. This work presents an approach using a feedback generated by the network to adapt the image
quality to present communication constraints. Thus, according to the current network status, the best possible
video image is provided to the operator while keeping constant frame rates and low packet loss.
1 INTRODUCTION
In the meantime, mobile robots are planned to be
used or even already used in many civil applica-
tions like surveillance or search and rescue to sup-
port and relieve the humans in place. Often, wire-
less communication is chosen to distribute and share
information between the humans and robots in the
team. This includes the transmissions of sensor
data from the robots, observations from the humans,
commands, and plans to the different team entities
from the human coordinators. In many cases IEEE
802.11 wireless LAN is used as underlying tech-
nology for the wireless network interconnecting the
team. Nowadays modern telecommunication equip-
ment with small power consumption and interfaces
for easy integration is available. This even allows an
affordable system of wireless ad-hoc networks of mo-
bile robots and human team members. These wire-
less ad-hoc networks offer a lot of advantages in con-
trast to static wireless network configurations, but
also raise a lot of new challenges in the system de-
sign. In (Hu and Johnson, 2002) a live audio and
video data transmission via a multi-hop wireless net-
work is demonstrated. In addition, several systems
of rovers with autonomous functionalities (Parker,
1994), groups of unmanned aerial vehicles (Ollero
et al., 2004), as well as heterogeneous multi robot
systems were proposed. Rooker and Birk presented
multi-robot exploration with robots using wireless
networks (Rooker and Birk, 2007). For ground based
systems Chung (Chung et al., 2002) presented a test
bed for a network of mobile robots. In the field of
rescue robotics (Rooker and Birk, 2005) or for inte-
grating UAVs into IP based ground networks (Zeiger
et al., 2007) the use of wireless networks is quite
common nowadays. With respect to unmanned aerial
vehicles (UAVs), (Ollero et al., 2003) presented a
system using an access point running in WLAN in-
frastructure mode onboard the UAV. (Vidal et al.,
2002) presented a system for communication between
a ground station and a UAV using WLAN in com-
bination with a high-gain antenna and radio modem.
The University of Pennsylvania presented a mobile
robot team connected via wireless network which
performed localization and control tasks (Das et al.,
69
Zeiger F., Sauer M. and Schilling K. (2008).
VIDEO TRANSMISSION WITH ADAPTIVE QUALITY BASED ON NETWORK FEEDBACK FOR MOBILE ROBOT TELEOPERATION IN WIRELESS
MULTI-HOP NETWORKS.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - RA, pages 69-76
DOI: 10.5220/0001492100690076
Copyright
c
SciTePress
2002). Currently, wireless ad-hoc networks for mo-
bile robots are a challenging and interesting scientific
topic and scenarios connecting several mobile robots,
humans in place (e.g. search and rescue applications),
and stationary network nodes (e.g. communication re-
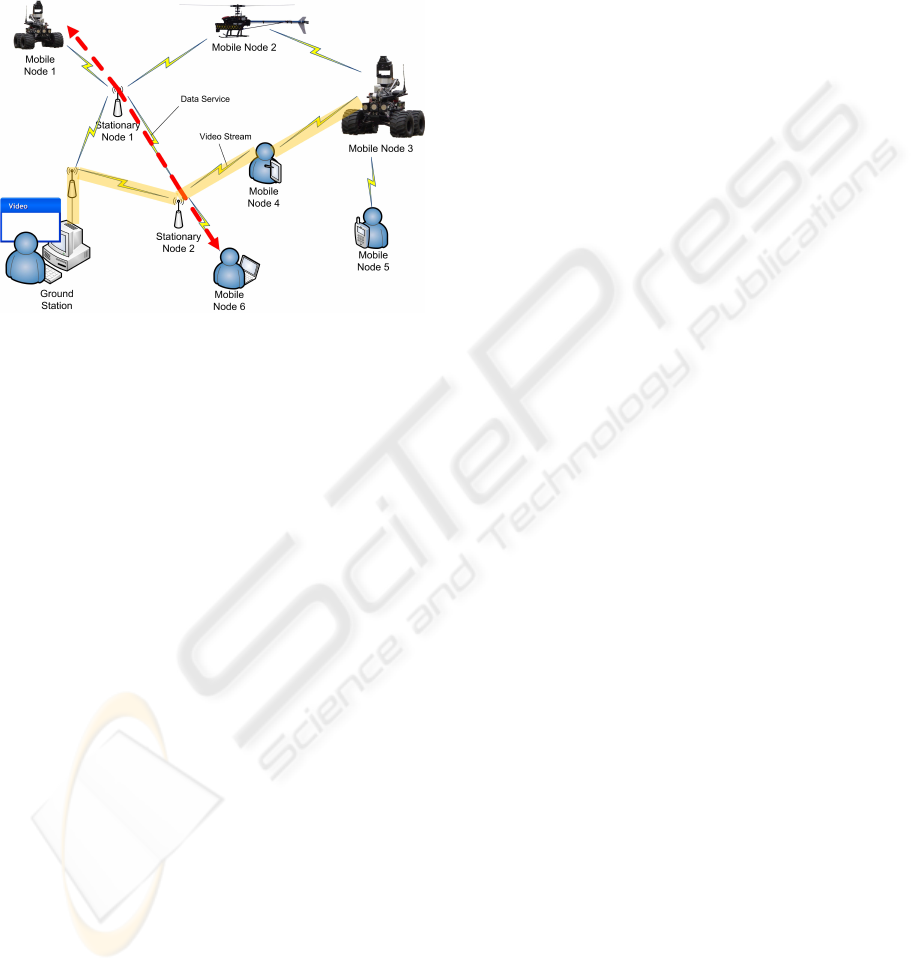
lay nodes) are evaluated and analyzed (cf. Figure 1).
Figure 1: Future scenario of a heterogeneous network of
mobile robots and human personnel.
Special ad-hoc routing protocols like AODV (Das
et al., 2003)(Chakeres and Belding-Royer, 2004),
DSR (Johnson and Maltz, 1996), or OLSR (Clausen,
2003) allow communication also in a highly dynamic
network topology which increases the capabilities and
the ease of use of mobile robots. These networks
allow any-to-any communication between all nodes
inside the network on a logical layer. Nevertheless,
the radio link always implies the potential danger of
a complete communication drop-out and the unpre-
dictable loss of packets with a variable packet loss
probability. Also the delay of packets delivered via
the same route by hop-by-hop fashion can be variable.
The same also applies for the bandwidth – e.g. IEEE
802.11 WLAN usually reduces its bandwidth as the
link quality decreases.
The dynamic characteristics of WLAN and es-
pecially if it is used together with ad-hoc routing
protocols has special drawbacks if direct teleopera-
tion should be implemented over these communica-
tion links. Although there was a lot of progress in the
area of autonomy for mobile robots, still many appli-
cations need the direct teleoperation of mobile robots,
which requires in many cases reliable and high band-
width links for video streams from the robots. For
low-bandwidth conditions and very defined environ-
ments, e.g. in tele-education, also virtual representa-
tions can be used to provide the necessary information
for direct teleoperation (Sauer et al., 2005). For the
more dynamic scenarios, (e.g. in search and rescue)
where the application of wireless ad-hoc networks is
very desirable, direct teleoperation with high band-
widths is mostly required. These needs for high band-
width result from the fact, that the video feedback still
delivers the most and richest information from the re-
mote environment to the operator. This detailed infor-
mation from the remote site is needed to increase and
maintain the situation awareness and common ground
between robot and human operator as basis for any
future decisions and commands done by the human
operator. (Murphy and Burke, 2005) showed that this
situation awareness is even more important than any
autonomy or assistance function implemented in the
robot. Dependent on the human teleoperation task
different characteristics of the video stream are im-
portant. If a navigation task is considered, the most
important parameters are a high frame rate, low num-
ber of frame losses, and a constant inter-arrival time
between to frames. Compared to these parameters the
quality and resolution of the video stream is less im-
portant for navigation. On the other hand if the human
has a search task (e.g. identify objects in a delivered
video stream), the quality and resolution has a higher
importance than the frame rate. Here, the proposed
mechanism for the video-stream adaptation according
to the load status of the route is designed for navigat-
ing a mobile robot with direct teleoperation.
The presented mechanism allows a variable image
quality of the video stream for the operator. The qual-
ity is adjusted automatically to the current state of the
wireless multi-hop network and respectively the avail-
able bandwidth of the used route by using a feedback
of the network status. As above mentioned, the state
of each single node of a route has a strong influence
on the quality of the used link in terms of bandwidth,
delay, and packet loss. To increase the performance
of mobile robot teleoperation, the available frame rate
at the operator PC should be almost constant. In or-
der to adjust the image quality according to the link,
an active feedback mechanism is implemented at the
application layer of each node. Thus, a feedback of
the network is available for the video stream source
which can be used to adapt the image quality. The
proposed mechanism requires only little resources, is
portable and easy to implement, and provides the op-
erator the highest possible video quality for mobile
robot teleoperation which can be guaranteed for the
current network state. As it supports no traffic classes
as it is known from wired IP networks, it should not be
considered as a quality of service (QoS) mechanism.
Anyway, available quality of service (QoS) mecha-
nisms – e.g. integrated services (IntServ) or differen-
tiated services (DiffServ) – are currently not applica-
ble in ad-hoc networks of mobile robots due to very
specific hardware requirements and the special solu-
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
70
tions which are currently available for network ser-
vice providers.
The remainder of this work is structured as fol-
lows. In Section 2, the investigated scenario is de-
scribed and a short definition of the problem is given.
Section 4 presents the implementation of the network
feedback mechanism and the adaptation of the video
stream in detail. The next Section gives an overview
of the mobile robot, the communication, and video
hardware which is used in the test scenarios. Section
5 defines the test scenarios of real hardware tests and
gives the results. Finally, a conclusion is given in Sec-
tion 6.
2 PROBLEM DEFINITION AND
SCENARIO
2.1 Problem Definition
In the above mentioned scenarios, the available
throughput of a route via a wireless multi-hop net-
work is a highly dynamic parameter which depends
on many environmental influences and affects the
quality of the application significantly. The through-
put of a wireless node can be decreased due to dif-
ferent reasons. In case intermediate nodes of a route
are also part of a route which has to transport other
bandwidth intensive flows, the available bandwidth
must be shared between all present routes via this
node, which will reduce the available bandwidth for
the video link. Furthermore, also a decreasing link
quality will reduce the bandwidth and increase the
packet loss probability. If the network is not react-
ing to traffic overload at a specific node, this will lead
to unpredictable packet loss at this point and delays at
the different receivers. For the teleoperation scenario
the effect will be that the video stream will get ran-
domly stuck, because packets get lost. Most probably
the operator will get confused and will stop the robot.
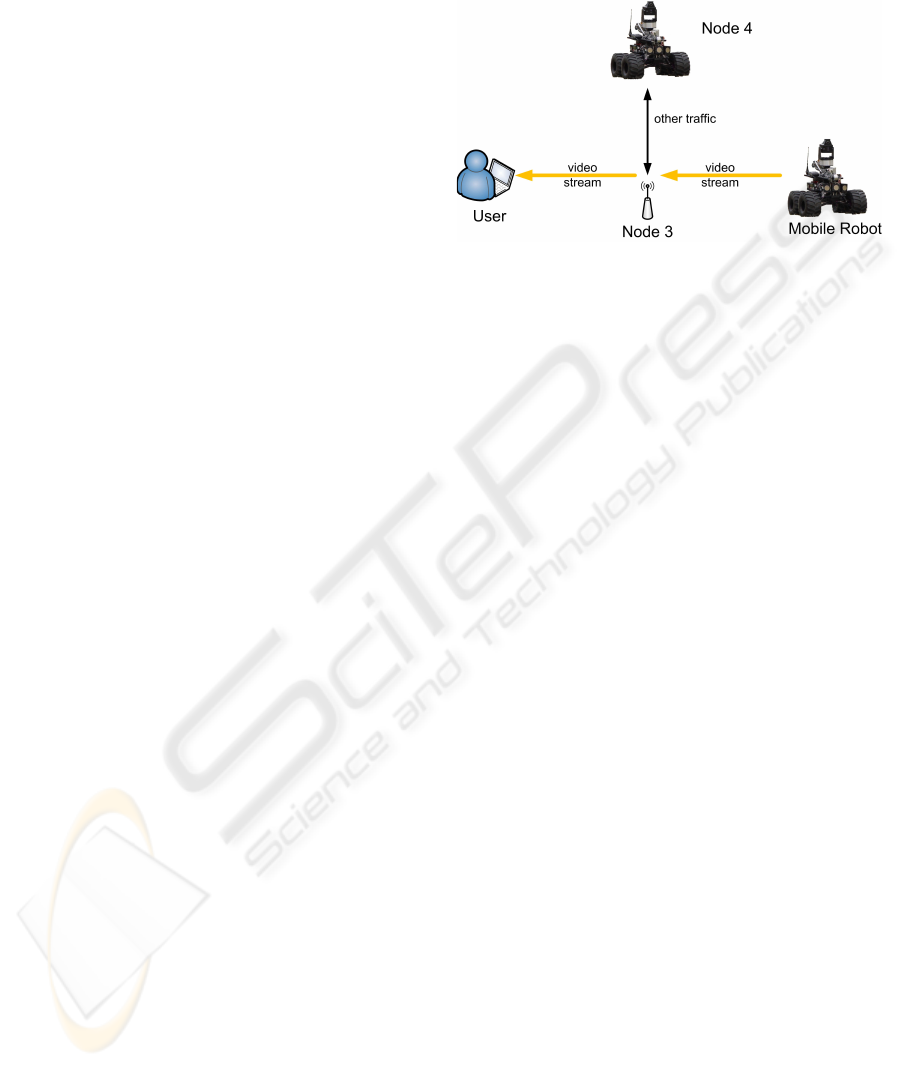
2.2 Test Scenario Additional Traffic
To set up the scenario where a node is used for more
than one bandwidth intensive traffic flow, four nodes
are used (cf. Figure 2). All nodes are located such
that they are in direct communication range. During
the tests, defined additional UDP traffic will be gener-
ated between node 3 and node 4 while the investigated
video stream is transmitted via UDP from the mobile
robot to the user’s PC via node 3. The generated UDP
traffic is used to reach certain load levels at interme-
diate node 3. As in this scenario, node 3 and node 4
are in communication range to all other nodes which
will also cause interferences at the physical layer.
Figure 2: The test setup for additional traffic.
To provide best repeatability of the tests, all nodes
are stationary. Only the additional traffic between
node 3 and node 4 will be varied according to a de-
fined profile. Measured categories are the packet loss
and the packet inter-arrival times. These categories
are measured while the amount of additionally gen-
erated traffic is increased. As reference test, video
transmissions of constant target quality are used and
compared to the packet loss of the transmission with
adaptive quality.
3 HARDWARE
The proposed mechanism was tested in a real outdoor
environment with a wireless ad-hoc network of four
nodes. One is the PC of the operator, one is an Out-
door MERLIN (cf. Figure 3) (Eck et al., 2007), and
two intermediate nodes are MERLIN robots (indoor
version). More details on the scenario are shown in
Figure 2 and a detailed description of the test setup
is given in Section 2. Figure 4 shows the detailed
system setup. All MERLIN robots have a C167 mi-
crocontroller for low-level operations and sensor data
processing, as well as a PC-104 for more complex
and computationally more intensive tasks. The PC-
104 uses a Linux operating system and all nodes are
equipped with 802.11b standard WLAN equipment
(Atheros chip).
To grab the video from an analog camera (ap-
prox. 65 degree field of view) an Axis video server
is used. It can grab the video from up to four cam-
eras with a resolution of 768x576 pixels. Dependent
on the configuration and connected clients, a frame
rate of up to 25 images per second can be provided
either as MJPEG or MPEG4 over a TCP/IP connec-
tion. For the described tests the PC-104 is connected
over a cross-link cable to the Ethernet interface of the
VIDEO TRANSMISSION WITH ADAPTIVE QUALITY BASED ON NETWORK FEEDBACK FOR MOBILE ROBOT
TELEOPERATION IN WIRELESS MULTI-HOP NETWORKS
71

Figure 3: The Teleoperated OutdoorMERLIN Robot.
video server. As nothing else is connected to this Eth-
ernet interface of the PC-104 it can be exclusively
used for the video traffic. For the presented tests four
MJPEG video streams with full resolution are estab-
lished with four different compression rates. MJPEG
as video compression was selected, as MPEG4 com-
pression takes a significant longer time on the Axis
server what causes a significant delay in the video
stream. Secondly a loss of a packet during transmis-
sion of MPEG4 streams to the robot might lead to
longer set of distorted images because compared to
MJPEG not all frames of the stream contain the full
image information needed. In case of the investigated
scenario, the MJPEG frames are transmitted via UDP
protocol.
4 NETWORK FEEDBACK AND
ADAPTIVE VIDEO QUALITY
The proposed mechanism mainly consists of two
parts: the network feedback, and the adaptive adjust-
ment of the video quality. The mechanism is used for
a simple admission control of the video source and in-
tends to provide the best possible video image quality
considering the current state of the link. The objective
is an efficient use of the available bandwidth without
overloading the route with video traffic to the opera-
tor. Thus, it is not used to increase the link quality
directly but uses the available resources most efficient
and reliable for the operators’ video stream.
4.1 Network Feedback
The network feedback is responsible to transmit the
status of a node to the video source. Therefore, nodes
of the network host a small client program at the ap-
plication layer. This client application is listening in
promiscuous mode at layer 3 of the ISO/OSI model
(IP-layer) and measures the utilization of the wireless
link. All kinds of traffic are monitored: incoming and
outgoing packets, packets for forwarding, and packets
with other nodes in range as destination – basically all
traffic causing the radio link of this node to be busy.
The network feedback client sends very small UDP
packets with an adjustable frequency (in the test setup
10 Hz) and 8 bytes as payload to the video-source if it
is a used hop in the video stream route between video-
source and receiving node. This payload is used to
indicate the status of the corresponding node, either
“normal operation” or “overload situation”. In the be-
ginning, each node is in the “normal operation” mode.
As soon as a certain utilization of the supported band-
width is exceeded, the status of this node switches
to “overload situation”. Important parameters for the
network feedback clients are the feedback frequency
f and the threshold for status determination d. In case
f is too high, too much feedback traffic is generated
which degrades the performance of the network. Even
these packets are very small, too many small packets
with a high sending frequency will have a very bad
effect on 802.11b WLAN and will significantly de-
crease the throughput. Thus, the generated feedback
traffic should be limited depending on the interpreta-
tion rate of the video adjustment mechanism and the
selected load window for the wireless nodes. Often
it is also not necessary to run a feedback client on
each network node. For setting parameter d, it should
be considered, that d specifies the percentage of the
nominal bandwidth (e.g. for 802.11b this would be 11
Mbit/sec) which can be used without switching to the
“overload situation” state. The feedback clients mea-
sures packets on layer 3, where the maximum avail-
able bandwidth corresponds to the “goodput” of the
wireless link which is about 75% of the nominal link
bandwidth (e.g. for 802.11b this would be 75% of 11
Mbit/sec).
As the proposed mechanism is used within a net-
work where a link failure can occur at any time, the
measurement and signaling mechanism must be ac-
tive. Thus, link failures and link reestablishing can
be monitored reliably. As the mechanism for video
quality adaptation performs best with a feedback fre-
quency of f = 10 Hz (according to the presented sce-
nario), the generated measurement traffic has a band-
width of less than 0.003 Mbit/sec per measurement
node. To set parameter d, the goodput” of about 7 to
7.5 Mbit/sec (for an 11 Mbit/sec WLAN link) must be
considered. In order to allow a reaction on potential
overload situations while providing the user a video
stream with a bandwidth of 1 to 1.5 Mbit/sec for the
best quality, d is set to 50.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
72

Figure 4: System setup.
4.2 Adaptive Video Quality
The Video Quality in the presented system is adapted
according to current state of the ad-hoc route for the
video transfer. The adaption mechanism receives all
status packages from the nodes between two received
frames from the image source, interprets these pack-
ages and selects the quality for the next frames with
a combination of previous status data and the cur-
rent state. Do reduce oscillating behavior in quality
switching near the selected load limit of the nodes a
kind of inertia mechanism for the adaptation process
was integrated. The implemented inertia mechanism
guarantees not to change the image quality whenever
a status of a node changes. It is possible to set a
certain number (cf. Algorithm 1, min/max of iner-
tia counter) of receiving same successive route load
states until the quality is changed. Algorithm 1 shows
this mechanism how the quality for the next frame is
selected according to the received network status mes-
sages.
In the current test setup, four different video qual-
ities are used at a frame rate of 11 frames per second
each. Table 1 shows the average size of one image for
the corresponding image quality level.
A higher number of different quality scales would
also be possible. In the current test setup a minimum
of −3 and a maximum of 3 are selected for the iner-
tia counter. With this value the mechanism reacts in
the worst case after six frames with subsequent over-
load states and in average after three frames. This
keeps the load caused by the video traffic on the dif-
ferent nodes in a certain defined window around the
selected threshold for overload state. In combina-
tion with parameter d of the above described feedback
mechanism, the quality adjustment intervenes as soon
as a node exceeds a radio link utilization of more than
Algorithm 1: Video quality adaptation.
Input: video streams of different quality;
load status messages
initialization;
foreach frame of current selected quality do
if one of the nodes overloaded then
increment inertia counter by one;
else
decrement inertia counter by one;
end
reset node states;
send video frame;
if inertia counter above max then
select lower quality if possible;
set inertia counter to zero;
else
if inertia counter below min then
select higher quality if possible;
set inertia counter to zero;
end
end
end
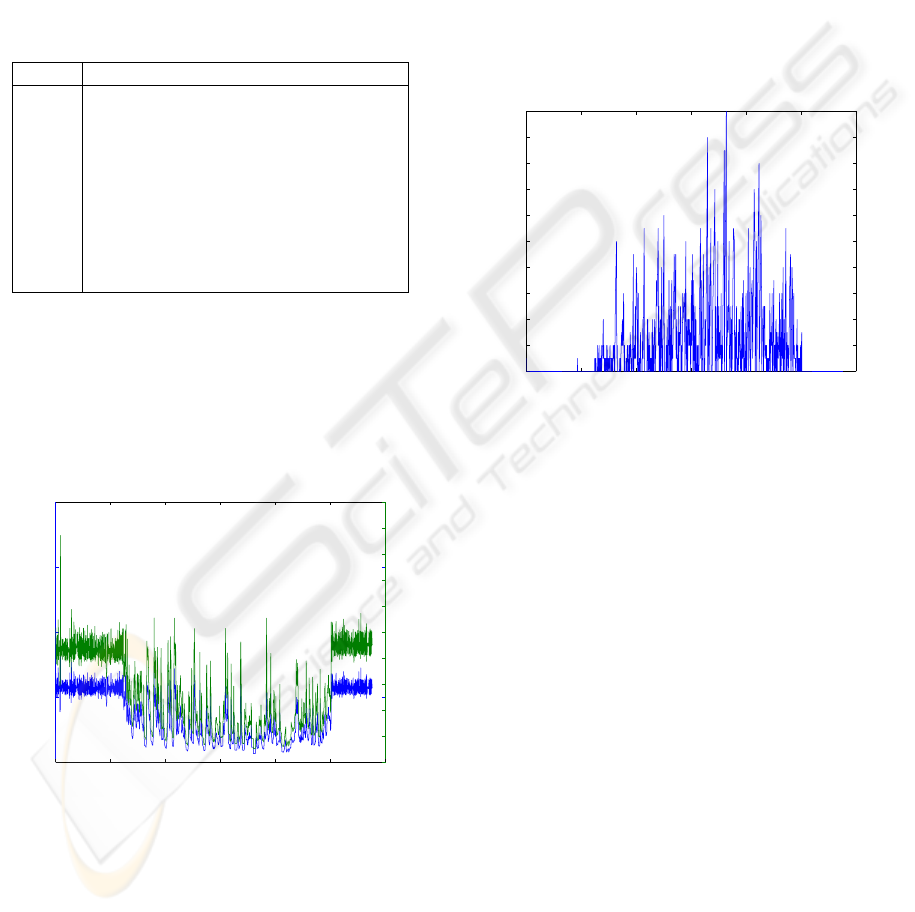
Table 1: Average size of one image per quality level.
Quality minimum low medium high
Size (kbytes) 15 26 34 47
approx. 78% (≈ 50% of nominal bandwidth). This
prevents the node from reaching a utilization of 100%
of the available maximum throughput which would
result in a high packet loss rate due to an increasing
number of packet collisions.
VIDEO TRANSMISSION WITH ADAPTIVE QUALITY BASED ON NETWORK FEEDBACK FOR MOBILE ROBOT
TELEOPERATION IN WIRELESS MULTI-HOP NETWORKS
73
5 TEST AND RESULTS
In a first step, a reference scenario was set up and
measured. Therefore, no network feedback mecha-
nism is used and a mobile robot generates a video
stream which is sent to the PC of the operator as it
is displayed in Figure 2. Between node 4 and node 3,
additional traffic is generated during the different test
phases according to Table 2 to reach a defined load at
intermediate node 3.
Table 2: Generated additional traffic.
Phase generated additional traffic (Mbit/sec)
1 0
2 3,2
3 4
4 4,8
5 5,6
6 6,4
7 7,2
8 8
9 8,8
The results of this reference test are shown in Fig-
ure 5. The x-axis shows the test time in milliseconds.
The left y-axis describes the received frame rate in
frames per second (fps) and the right y-axis displays
the received video data rate in bytes per second (bps)
at the receiving node (operator’s PC).
0 0.5 1 1.5 2 2.5 3
x 10
5
0
10
20
30
40
Frame Rate [frames/s]
Time [ms]
Frame Rate and Traffic without Network Feedback
0 0.5 1 1.5 2 2.5 3
x 10
5
0
1
2
3
4
5
6
7
8
9
10
x 10
5
Video Data [byte/s]
Figure 5: Framerate and Traffic without Network Feedback.
The test started with no additional traffic being
generated. Successively, more and more additional
traffic is generated by switching to the next phase each
20 seconds according to Table 2. After 200 seconds
of test time, the additionally generated traffic is re-
duced by switching back one phase each 10 seconds.
In the beginning of the test – during phase 1 up to the
end of phase 3 – the received frame rate is about 11
fps. After switching to phase 4 at about 60 seconds,
the received video frame rate decreases significantly.
The received frame rate between 100 and 200 seconds
drops to 2 − 3 fps while node 3 is overloaded. After
the additionally generated traffic is reduced, the re-
ceived frame rate recovered to 11 fps. Increasing the
additional traffic forces node 3 to an overload situa-
tion. As the bandwidth used by the video stream can-
not be adapted to the new situation, a packet loss of
the video data is inevitable which is shown in Figure
6. The y-axis shows the number of lost packets vs.
the test time on the x-axis.
0 0.5 1 1.5 2 2.5 3
x 10
5
0
2
4
6
8
10
12
14
16
18
20
Packet Loss
Time [ms]
Packet Loss without Network Feedback
Figure 6: Packet Loss without Network Feedback.
Another measured category is the frame inter-
arrival time of the video stream. This is a quite sen-
sitive aspect, as a large jitter (variance of the frame
inter-arrival time) is very irritating for the operator
due to a very unsteady motion of the video image.
Without additional traffic, the frame inter-arrival time
is smaller than 100 ms with a variance close to 0 (cf.
Figure 7) what corresponds to the average frame rate
of 11 fps. After 60 seconds and an additionally gen-
erated traffic of 4.8 Mbit/sec, the frame inter arrival
time increases to more than 400 ms with a variance
of more than 10000 which indicates an unacceptable
video for the operator.
The same test setup is used again – now with the
network feedback and adaptive quality mechanism
(cf. Section 4), which should improve the observed
behavior. In Figure 8, the frame rate and the video
data rate is shown while using an adaptive video qual-
ity together with the network feedback mechanism.
In the beginning, without additional traffic, the mo-
bile robot generates a video stream of about 450000
bytes/sec. During the test, the additionally generated
traffic is increased similar to the test described above.
The implemented mechanism takes care that the video
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
74

0 0.5 1 1.5 2 2.5 3
x 10
5
0
100
200
300
400
500
600
700
800
Frame Inter Arrival Time [ms]
Time [ms]
Frame Inter Arrival Time and Jitter without Network Feedback
0 0.5 1 1.5 2 2.5 3
x 10
5
0
2000
4000
6000
8000
10000
12000
Jitter
Figure 7: Frame Inter Arrival Time without Network Feed-
back.
source reduces its generated video traffic to about
300000 as soon as phase 3 (with an additional load
of 4 Mbit/sec) is entered. Increasing the additional
load at node 3 to more than 4.8 Mbit/sec results again
in a reduction of the video traffic (180000 bytes/sec).
During the complete test run, the frame rate stays al-
most constantly at 11 fps as the adaptive video band-
width reduction avoids the loss of video traffic. Also
the frame inter arrival time stays constantly below 100
ms with a jitter of almost 0 (cf. Figure 9).
0 0.5 1 1.5 2 2.5 3
x 10
5
0
10
20
30
40
Frame Rate [frames/s]
Time [ms]
Frame Rate and Traffic with Network Feedback
0 0.5 1 1.5 2 2.5 3
x 10
5
0
1
2
3
4
5
6
7
8
9
10
x 10
5
Video Data [byte/s]
Figure 8: Framerate and Traffic with Network Feedback.
6 CONCLUSIONS
In this work, a mechanism for providing a video
stream over a dynamic multi-hop route with an adap-
tive quality for mobile robot teleoperation is pro-
posed. The mechanism uses a feedback from the net-
work which is generated at dedicated nodes and ad-
justs the image quality to the current communication
0 0.5 1 1.5 2 2.5 3
x 10
5
0
100
200
300
400
500
600
700
800
Frame Inter Arrival Time [ms]
Time [ms]
Frame Inter Arrival Time and Jitter with Network Feedback
0 0.5 1 1.5 2 2.5 3
x 10
5
0
2000
4000
6000
8000
10000
12000
Jitter
Figure 9: Frame Inter Arrival Time with Network Feedback.
link status. The proper functionality of this adaptive
quality mechanism is tested in teleoperation scenarios
with real hardware under different network load situ-
ations. In situations with a very high link load due
to additional other network traffic, usually the packet
loss rate and the packet inter-arrival time is affected in
a way that reliable and proper teleoperation is not pos-
sible anymore. By adjusting the image quality of the
video stream it is possible to provide a stable video
frame rate for the operator. In fact, the remaining
bandwidth for the video stream is used efficiently in
terms of providing a video with a stable frame rate
suitable for mobile robot teleoperation.
REFERENCES
Chakeres, I. D. and Belding-Royer, E. M. (2004). AODV
Routing Protocol Implementation Design. In Proceed-
ings of the International Workshop on Wireless Ad hoc
Networking (WWAN), Tokyo, Japan, pages 698–703.
Chung, T., Cremean, L., Dunbar, W. B., Jin, Z., Klavins,
E., Moore, D., Tiwari, A., van Gogh, D., and Stephen-
Waydo (2002). A Platform for Cooperative and Coor-
dinated Control of Multiple Vehicles. 3rd Conference
on Cooperative Control and Optimization.
Clausen, P. J. T. (2003). RFC 3626, Optimized link state
routing protocol (OLSR). IETF, Network Working
Group.
Das, A., Spletzer, J., Kumar, V., and Taylor, C. (2002). Ad
Hoc Networks for Localization and Control. In Pro-
ceedings of the 41st IEEE Conference on Decision and
Control, (CDC 2002), volume 3, pages 2978–2983.
Das, S., Perkins, C. E., and Belding-Royer, E. M. (2003).
Ad hoc On-Demand Distance Vector (AODV) Rout-
ing. IETF RFC 3561.
Eck, D., Stahl, M., and Schilling, K. (2007). The Small
Outdoor Rover MERLIN and its Assistance System
for Tele-Operations. In Proceedings of International
VIDEO TRANSMISSION WITH ADAPTIVE QUALITY BASED ON NETWORK FEEDBACK FOR MOBILE ROBOT
TELEOPERATION IN WIRELESS MULTI-HOP NETWORKS
75

Conference on Field and Service Robotics (FSR),
Chamonix (France).
Hu, Y. and Johnson, D. (2002). Design and Demonstration
of Live Audio and Video over Multihop Wireless Ad
Hoc Networks. In Proceedings of the MILCOM 2002.
Johnson, D. B. and Maltz, D. A. (1996). Dynamic Source
Routing in Ad-Hoc Wireless Networks. Mobile Com-
puting, 353.
Murphy, R. and Burke, J. L. (2005). Up from the Rubble:
Lessons Learned about HRI from Search and Rescue.
In Proceedings of the 49th Annual Meetings of the Hu-
man Factors and Ergonomics Society.
Ollero, A., Alcazar, J., Cuesta, F., Lopez-Pichaco, F., and
Nogales, C. (2003). Helicopter Teleoperation for
Aerial Monitoring in the COMETS Multi-UAV Sys-
tem. In 3rd IARP Workshop on Service, Assistive and
Personal Robots (IARP 2003), Madrid (Spain).
Ollero, A., Hommel, G., Gancet, J., Gutierrez, L.-G.,
Viegas, D., Forssn, P.-E., and Gonzlez, M. (2004).
COMETS: A multiple heterogeneous UAV system. In
IEEE International Workshop on Safety, Security and
Rescue Robotics (SSRR 2004).
Parker, L. E. (1994). ALLIANCE: An Architecture for Fault
Tolerant, Cooperative Control of Heterogeneous Mo-
bile Robots. In IEEE/RSJ International Conference
on Intelligent Robots and Systems (IROS 1994).
Rooker, M. N. and Birk, A. (2005). Combining Explo-
ration and Ad-Hoc Networking in RoboCup Rescue.
In Nardi, D., Riedmiller, M., and Sammut, C., editors,
RoboCup 2004: Robot Soccer World Cup VIII, vol-
ume 3276 of Lecture Notes in Artificial Intelligence
(LNAI), pages 236–246. Springer.
Rooker, M. N. and Birk, A. (2007). Multi-robot exploration
under the constraints of wireless networking. Control
Engineering Practice, 15(4):435–445.
Sauer, M., Zeiger, F., Driewer, F., and Schilling, K.
(2005). Remote control on mobile robots in low
bandwidth environments. In International Conference
on Informatics in Control, Automation and Robotics,
Barcelona, Spain, pages 163 – 168.
Vidal, R., Shakernia, O., Kim, H. J., Shima, H., and Sastry,
S. (2002). Multi-Agent Probabilistic Pursuit-Evasion
Games with Unmanned Ground and Aerial Vehicles.
IEEE Transactions on Robotics and Automation, Vol.
18, Number 5:662–669.
Zeiger, F., Selbach, C., Ruderisch, B., and Schilling, K.
(2007). An Application Protocol to Integrate a Small
Size Helicopter into an IP based Ad-Hoc Network. In
Proceedings of ROBOCOMM 2007, Athens (Greece).
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
76
