
AUTOMATED SIZING OF ANALOG CIRCUITS BASED ON
GENETIC ALGORITHM WITH PARAMETER
ORTHOGONALIZATION PROCEDURE
Masanori Natsui and Yoshiaki Tadokorot
Dept. of Information and Computer Sciences, Toyohashi University of Technology
1-1 Hibarigaoka, Tempaku-cho, Toyohashi-shi, Aichi 441-8580, Japan
Keywords: Evolutionary computation, Circuit synthesis, Analog circuits, Genetic algorithms, Principal component anal-
ysis.
Abstract: This paper presents a method for the automated sizing of analog circuits using genetic algorithm (GA). For the
rapid and efficient exploration of GA, we introduce the idea of search space sphering and dimension reduction
with principal component analysis (PCA). The potential capability of the system is demonstrated through
the automated sizing of wide-swing current mirror circuit. Experimental results show that the system with
PCA successfuly generates higher-performance circuits under given evaluation function on average, and the
dimensionally reduction method further improves the performance of solutions.
1 INTRODUCTION
Electronic design automation (EDA) has matured as
a technology to be universally accepted for produc-
ing highly integrated VLSI systems. However, there
still remain many difficult design problems to be ad-
dressed in the advanced SoC (System on Chip) era.
In this paper, we propose an automated analog
circuit design method based on evolutionary compu-
tation. An analog circuit inherently involves trade-
offs among a large number of performance metrics
and the performance is determined by the complex
and nonlinear nature of relations between the topol-
ogy and parameter values (e.g. device sizes) of a cir-
cuit. Therefore, the analog circuit design often re-
quires simultaneous optimization of circuit topology
and parameter values. It requires the knowledge and
experience of experts who had trained in a particular
way to understand circuit/device technologies. This
is the major motivation to introduce evolutionary op-
timization techniques for the design automation.
There are already some approaches to the evolu-
tionary design of analog circuit structures(Koza et al.,
1997; Lohn and Colombano, 1999; Shibata and Fu-
jii, 2001). The reference (Koza et al., 1997) de-
scribes various analog circuit design including ana-
log filters and amplifiers by means of genetic pro-
gramming (GP). The reference (Lohn and Colom-
bano, 1999) proposes a method of representing elec-
tronic circuit structures by “linear representation” and
its application to analog circuit synthesis using ge-
netic algorithm (GA). The reference (Shibata and Fu-
jii, 2001) also applies GA to the synthesis of analog
circuits based on current path based coding. These
approaches appear to perform both topology and pa-
rameter optimization equally. Both approaches have
the possibilities of finding best possible solutions un-
der given conditions and constraints since both topol-
ogy and parameter optimization are performed simul-
taneously. However, the simultaneous optimization
often leads to an explosion of search space, which re-
quires much computation time for finding a solution,
and sometimes converges into a local optimum.
To make our method suitable for practical use, we
have proposed a two-stage optimization process of
analog circuits as follows: (i) topology-oriented opti-
mization using evolutionary computation and (ii) de-
tailed optimization of parameter values (e.g. aspect
ratios of transistors) using a commercially available
automatic circuit sizing software(Homma et al., 2000;
Homma et al., 2002; Natsui et al., 2005; Natsui et al.,
2007). This storategy have achieveda reduction in the
size of search space and an improvement in the search
efficiency.
In this paper, we mainly focus on an automated
analog circuit sizing for a given circuit topology by
193
Natsui M. and Tadokorot Y. (2008).
AUTOMATED SIZING OF ANALOG CIRCUITS BASED ON GENETIC ALGORITHM WITH PARAMETER ORTHOGONALIZATION PROCEDURE.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - ICSO, pages 193-199
DOI: 10.5220/0001492301930199
Copyright
c
SciTePress
using GA. In order to accelerate the search efficiency
of the circuit sizing system, we propose the idea of
applying the parameter orthogonalization procedure
based on principal component analysis (PCA) to the
system. In the analog circuit design, the relative scale
between circuit parameters such as the ratio of the
length and width of a transistor or that of the widths
of two transistors has an important role to determine
circuit performance. If the system can consider the
correlations between parameters that are specific to
higher-fitness individuals and periodically reduce the
search space, it can increase the search efficiency of
the optimization process.
From this viewpoint, we introduce a search space
reduction operation based on PCA. The principal
component-based exploration realizes efficient pa-
rameter optimization, and additionally, dimensional-
ity reduction method further reduces the search space.
As a result, we can realize the high-performance op-
timization system which finds the optimal parameter
set with less computation time.
The potential capability of the proposed system
is demonstrated through the automated circuit sizing
of a wide-swing current mirror, which is one of the
most popular building block in analog circuit design.
This paper is organized as follows: Section 2 presents
the basic concept of the GA-based automated circuit
sizing system and its extension using PCA. Section 3
demonstrates the experimental result. Section 4 is the
conclusion and future prospects.
2 GA-BASED AUTOMATED
CIRCUIT SIZING SYSTEM AND
ITS EXTENSION USING PCA
2.1 Genetic Algorithm
Genetic algorithm (GA) can be regarded as a unique
variation of evolutionary computation techniques
(Back et al., 1997; Holland, 1975; Goldberg, 1989).
In general, evolutionary methods mimic the process
of natural evolution, the driving process for emer-
gence of complex structures well-adapted to the given
environment. The better an individual performs under
the conditions the greater is the chance for the individ-
ual to live for a longer while and generate offspring.
As a result, the individuals are transformed to the suit-
able forms on the designer’s defined constraint.
Figure 1 shows the overall procedure of GA. At
first, GA generates embryonic individuals randomly
to form the initial population P(0). Note that usually
each individual is represented by a fixed-length bit
program Genetic Algorithm;
begin
t := 0;
{t: Number of generations.}
initialize(P(t));
{P(t): Population.}
evaluate(P(t));
while t ≤ Max. num. o f gen. do
begin
C(t) := crossover(P(t));
M(t) := mutation(P(t));
evaluate(C(t) ∪ M(t));
P(t + 1) := select(C(t) ∪ M(t) ∪ P(t));
t := t +1;
end
end.
Figure 1: Typical flow of GA.
string in the traditional GA, while our system applies
real-coded genetic algorithm (RCGA) (Eshelman and
Schaffer, 1993) which uses a real number vector rep-
resentation of chromosomes.
The next step is to evaluate a fitness function of
all individuals in P(t). A value for fitness is assigned
to each individual depending on how close it actu-
ally is to solving the problem. Since typical analog
circuits have various performance metrics, an ana-
log circuit optimization problem is usually formu-
lated as (1) a single-objective optimization problem
where different performance objectives are combined
to form a scalar objective, or (2) a multiobjectiveopti-
mization problem based on Pareto-optimality(Somani
et al., 2007). In our system, we apply the single-
objective approach for the system simplicity and rea-
sonable computational effort. Thus a synthetic fitness
function for a circuit is defined by the combination of
fitness functions for various performance objectives.
After the evaluation, the system selects a set of in-
dividuals having higher fitness values to perform evo-
lutionary operations: crossover and mutation. The
crossover recombines two individuals into two new
offsprings. The mutation operation, on the other
hand, changes the values of chosen genes randomly.
There are many ways how to do crossover and muta-
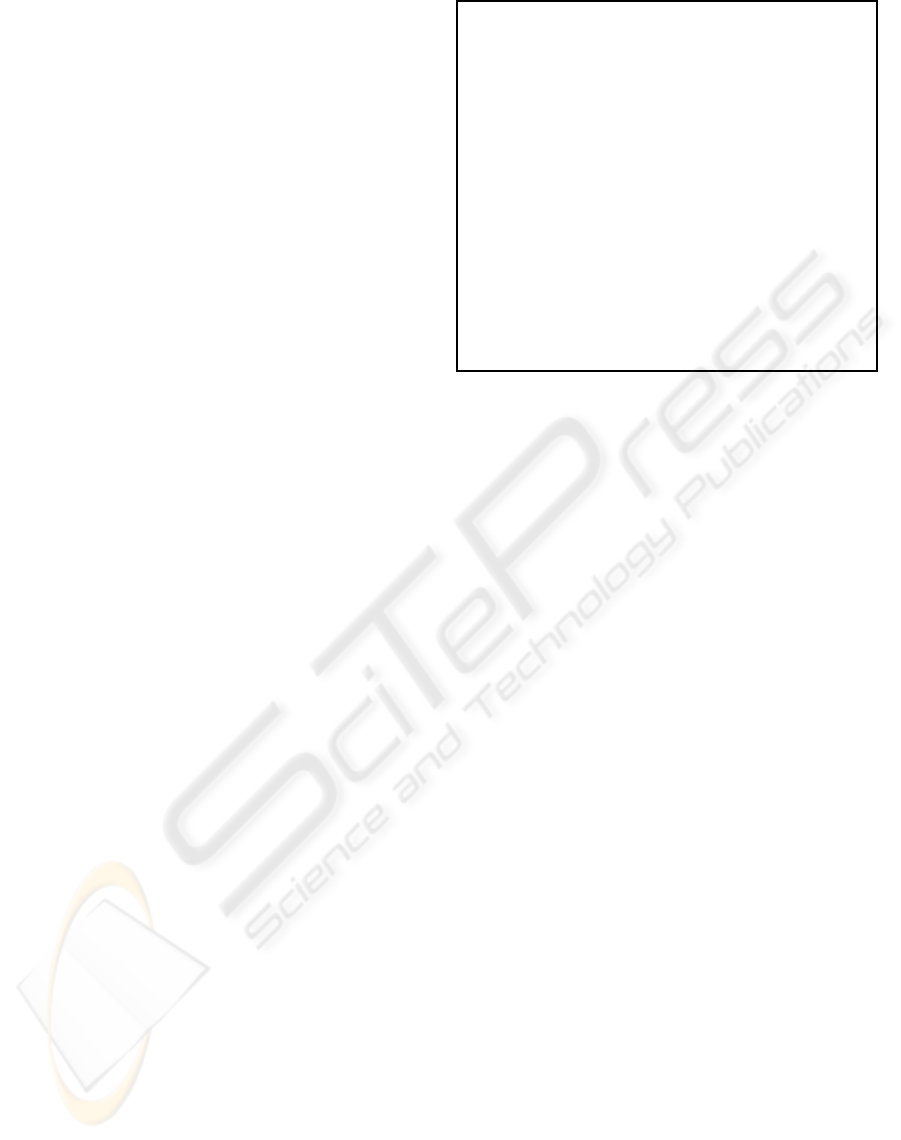
tion. In our system, we apply blend crossover (BLX-
α)(Fig. 2) and uniform mutation. Blend crossover
generates the offspring vectors X
1
= (x
11
,x
12
,··· ,x
1n
)
and X
2
= (x
21
,x
22
,··· ,x
2n
) from parant vectors P
1
=
(p
11
, p
12
,··· , p
1n
) and P
2
= (p
21
, p
22
,··· , p
2n
) by
x
1i
= γp
1i
+ (1 − γ)p
2i
and x
2i
= (1 − γ)p
1i
+ γp
2i
,
where γ = (1+2α)u
i
−α, u
i
∈ [0,1] is a random value.
Uniform mutation, on the other hand, changes the
value of the element to a value chosen from the uni-
form distribution on the specified interval.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
194
Parameter 1
Parameter 2
Parent 1
Parent 2
d
2
α
d
1
α
d
1
α
d
2
α
d
2
d
1
Child 1
Child 2
Figure 2: Blend crossover for two parameter vectors.
2.2 Search Space Reduction using PCA
Let us consider the search space reduction method of
the automated analog circuit sizing on the basis of
common characteristics of higher-fitness individuals.
Given individuals which have averagely higher fit-
ness values after a certain generations, one of the sim-
plest way is to narrow down the search space of each
parameter independently according to its mean and
variance. If the parameters are orthogonalized and
noncorrelated, this approach may work well. How-
ever in the case of analog circuit sizing, it sometimes
fails and the exploration process converges to a local
minimum since these parameters usually have strong
correlations mutually. In order to perform effective
search space reduction, we should apply an appropri-
ate reduction method considering its relationship.
From this viewpoint, we utilize a coordinate trans-
form procedure based on principal component analy-
sis (PCA) to find a rotated orthogonal system such
that the elements in the new coordinates are uncorre-
lated. PCA is a well known method for reducing the
dimensionality by extracting components which are
uncorrelated with each other, and has been used in a
wide range of research including signal processing,
statistics, and neural computing, as the powerful tool
of data analysis and compression (Jolliffe, 2002). The
exploration and search space correction based on the
principal components and their variances have a pos-
sibility of enhancing the efficiency of the parameter
optimization of GA.
The parameter orthogonalization procedure by
PCA can be performed by the following steps:
1. Selects a set of higher-fitness individuals, where
the parameter set corresponding to the ith individ-
ual is represented by x
i
= (x
i1
,x
i2
,··· ,x
iM
).
2. Generates a parameter matrix
X =
x
1
.
.
.
x
N
=
x
11
... x
1M
.
.
.
.
.
.
.
.
.
x
N1
... x
NM
,
where each row corresponds a parameter set of an
individual.
3. Generates a matrix
˜
X = ( ˜x
ij
) by normalizing
values of the matrix X so as to the mean
µ
j
=
1
N
∑
N
i=1
˜x
ij
= 0 and the variance σ
2
j
=
1
N−1
∑
N
i=1
( ˜x
ij
− µ
j
)
2
= 1 for each column.
4. Calculates a variance-covariance matrix, eigen-
values and eigenvectors of
˜
X.
5. Calculates an orthogonalized parameter matrix
X
′
=
˜
XA = (x
′
ij
) where A is a matrix such that
each column contains coefficients for one princi-
pal component.
6. Applies x
′
i
= (x
′
i1
,x
′
i1
,··· ,x
′
iM
) to the parameter set
corresponding to the ith individual.
The orthogonalization procedure is performed peri-
odically with a specific interval during the evolution
process by GA. This means that the system always
use the vectors of real number elements with µ = 0
and σ
2
= 1 for the individual representation, while the
search space of circuit parameters is periodically cor-
rected depending on the distribution of higher-fitness
individuals. Additionally, if the variation of the last
principal components are sufficiently small, we can
eliminate these components from an exploration and
reduce the length of individuals since they contribute
relatively little extra information of individuals. This
dimensionality reduction further improves the search
efficiency, and reduces the total computational time.
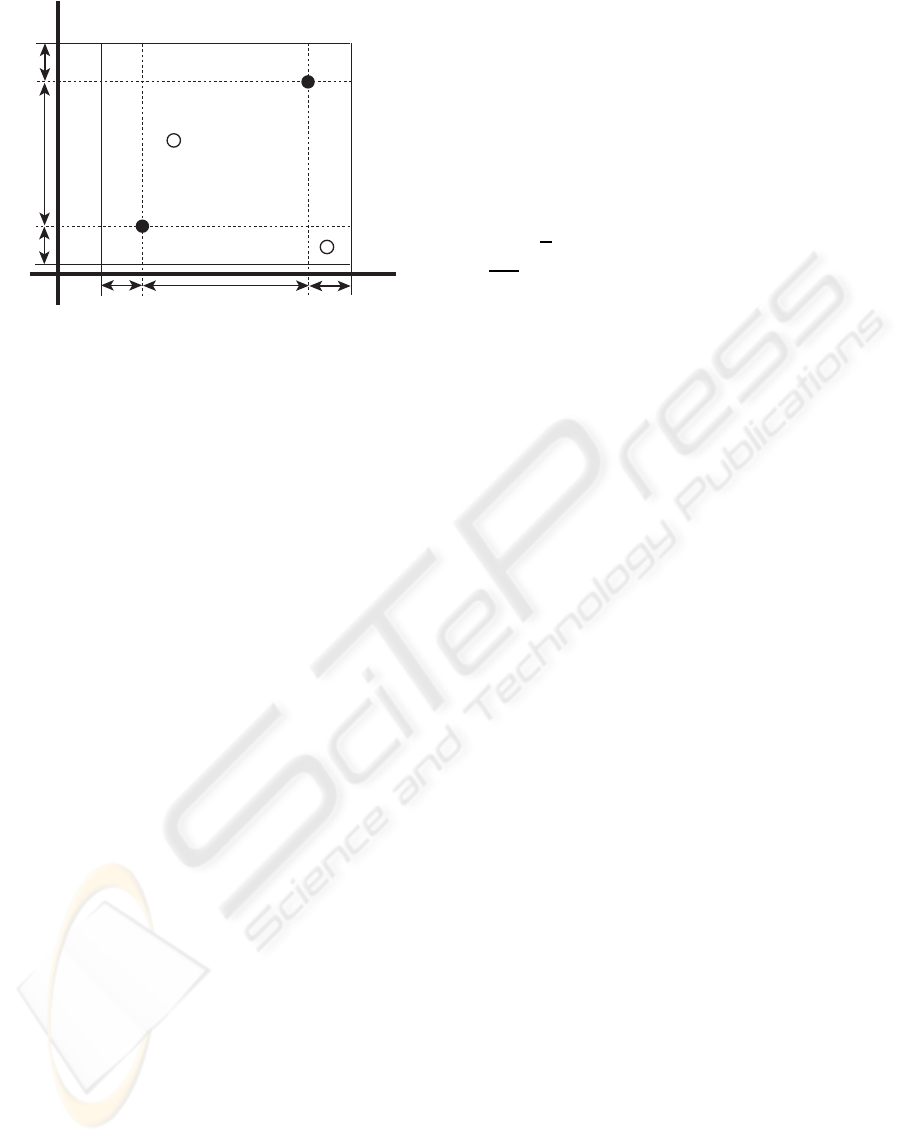
When the system evaluates the evolved individ-
uals, corresponding circuit parameters are restored
by performing the above operation in reverse order
(Fig. 3). Moreover, the restored parameters are quan-
tized with a certain step depending on a variance of
each parameter and the minimum step size of a tar-
get fabrication process. In our system, the param-
eters are quantized with step size σ
j
/10, where σ
j
is a variance of the jth parameter. If σ
j
/10 is less
than the minimum step size, the system applies the
latter value. It realizes a coarse-to-fine search strat-
egy, which achieves an effective exploration due to
the prevention of the search space explosion of GA.
3 EXPERIMENT
We implement a GA-based automated analog circuit
sizing system. The system applies GA to search the
AUTOMATED SIZING OF ANALOG CIRCUITS BASED ON GENETIC ALGORITHM WITH PARAMETER
ORTHOGONALIZATION PROCEDURE
195
Matrix A’
Mean
Variance
Parameter 1
Parameter 2
Principal component 1
Principal component 2
Parameter 1
Parameter 2
Parameter 1
Parameter 2
Periodically updated
Parameter restration
Genotype
(Principal components)
Phenotype
(Circuit parameters)
Figure 3: Parameter restoration (A
′
is a matrix such that AA
′
= I).
Table 1: Main parameter values for GA.
Parameter Value
Maximum number of generations 500
Population size 200
Crossover method BLX-0.5
Crossover rate 0.7
Mutation rate 0.1
Mutation method Uniform
Selection method Rank & Elitist
Interval of PCA execution 20
Num. of individuals for PCA 20
VDD
Iref
Tr5
Tr1
I
out
Iin
Tr2
Tr3 Tr4
Figure 4: Wide-swing nMOS current mirror.
optimal set of circuit parameters (transistor length L
and width W) which achieves higher performance on
a given circuit topology, and periodically the orthog-
onalization procedure using PCA is performed to cor-
rect the search space of the optimization. After up-
dating a characteristic vector matrix, the system de-
stroys the lower-fitness individuals and creates ran-
domly generated ones to form a population of the next
generation.
The design specification considered here is a
wide-swing nMOS current mirror (Fig. 4), which is
widely used in analog integrated circuits both as a
biasing element and as a load device for amplifier
stage(Gray et al., 2001). The basic function of cur-
rent mirrors is to produce an output current i
O
equal
to the input current i
I
multiplied by a desired current
gain B, that is, i
O
= −B× i
I
. Ideally the gain B is in-
dependent of the input frequency, the output current
i
O
is independent of the output voltage v
O
, the input
voltage drop v
I
equals zero, and the circuit area is as
small as possible. In practice, the characteristics of
real current mirrors deviate from those of ideal ones.
There are various possible choices for a current mirror
structure due to the trade-offs among the characteris-
tics.
Design parameters of this circuit structure are
(W
1
,W
2
,···,W
5
,L
1
,L
2
,···,L
5
), where W
i
and L
i
are the
width and length of the MOS transistor Tr
i
, respec-
tively. The generated individual is translated into the
corresponding netlist, which is simulated to analyze
its electrical behavior and characteristics with SPICE
simulations. Traditionally a weighted sum of the fit-
ness functions has been used for the function aggre-
gation. However, for nonlinear optimization prob-
lems like analog circuit sizing where the different ob-
jectives have nonlinear dependence upon each other,
this approach sometimes causes some difficulties and
leads to the premature convergence of the evolution
process. For example, if one objective is easier to at-
tain a target performance than other objectives, the
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
196

(a)
(b)
Best individual fitness (20 runs)
Average for 20 runs
0
1
0 50 100 150 200
Generations
Normalized synthetic fitness
Normalized synthetic fitness
Best individual fitness (20 runs)
Average for 20 runs
0
1
0 50 100 150 200
Generations
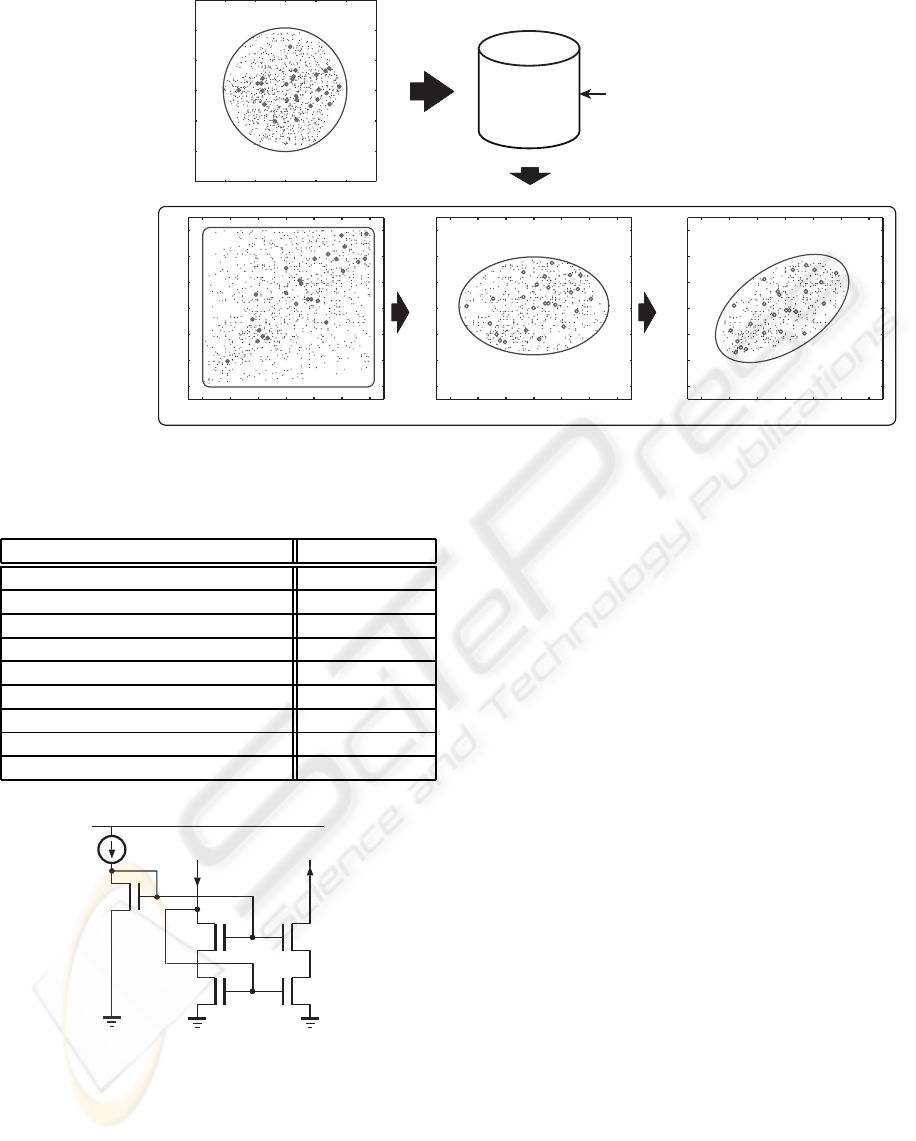
Figure 5: Fitness transition: (a) the conventional system, (b)
the proposed system with PCA (The synthetic fitness values
are normalized into 0 ≤ F ≤ 1).
population sometimes convergesto the specific search
space, which leads to the evolutionary stasis. For sat-
isfying all the objectivesat the end of the optimization
run, all the different fitness functions must be normal-
ized and weighted equally.
In order to prevent the system from the premature
convergnce, we define the synthetic evaluation func-
tion F as follows:
F =
3
∏
i=1
F
i
,
where F
1
evaluates the accuracy in i
I
-i
O
characteristic,
F
2
evaluates the output saturation voltage investigated
through DC transfer analysis, and F
3
evaluates the in-
put impedance. The value of F
i
is determined accord-
ing to the rank of the ith characteristic in a population
and is normalized into 0 ≤ F
i
≤ 1. Thus the optimiza-
tion process advances towards searching a parameter
set which realizes higher performance synthetically.
Note that only when the ith characteristic of an indi-
vidual cannot be simulated by SPICE, F
i
is set to 0
and the synthetic fitness value of the individual is also
set to 0, which will be eliminated in the selection op-
eration.
For more effecient exploration, we need further
investigation of finding more proper fitness function.
The result would be reported in the future.
In order to demonstrate the specific advantage of
the search space reduction using PCA, we carry out
experiments on generating an optimal parameter set
of the given current mirror circuit structure. Table
1 summarizes the system parameters in this experi-
ment. We set 0.6µm ≤ W
i
≤ 60µm and 0.6µm ≤ W
i
≤
60µm, and the minimum step size of these parame-
ters is 0.1µm. Thus the size of the possible choices is
(
60−0.6
0.1
)
10
≃ 5.47 × 10
27
, which needs 93 bits for an
individual representation in traditional GA. By apply-
ing parameter quantizetion method described above,
on the other hand, the proposed system limits the size
to 10
10
at most, which needs 34 bits, and the possible
choices of circuit parameters are changed depending
on the result of PCA.
Figure 5 shows the effect of PCA-based search
space reduction by comparing the average fitness
transitions. The system with PCA shows the tendency
to improve the fitness more rapidly. It clearly shows
that the proposed system explores a search space and
finds better implementations more effectively com-
pared with the conventional system.
Next, we evaluate the effect of applying PCA on
the performance of evolved solutions. Figure 6 com-
pares the performance of evolved circuits on
(a) the conventional system,
(b) the system with the search space reduction ac-
cording to their means and variances indepen-
dently,
(c) the system with the parameter orthogonalization
procedure by PCA,
(d) the system with the parameter orthogonaliza-
tion procedure and dimensionally reduction using
PCA.
We performed 20 distinct evolutionary runs for each
condition. We can see that the system with PCA gen-
erated higher-performance circuits under given eval-
uation function on average, and the dimensionally re-
duction method further improved the performance of
evolved solutions.
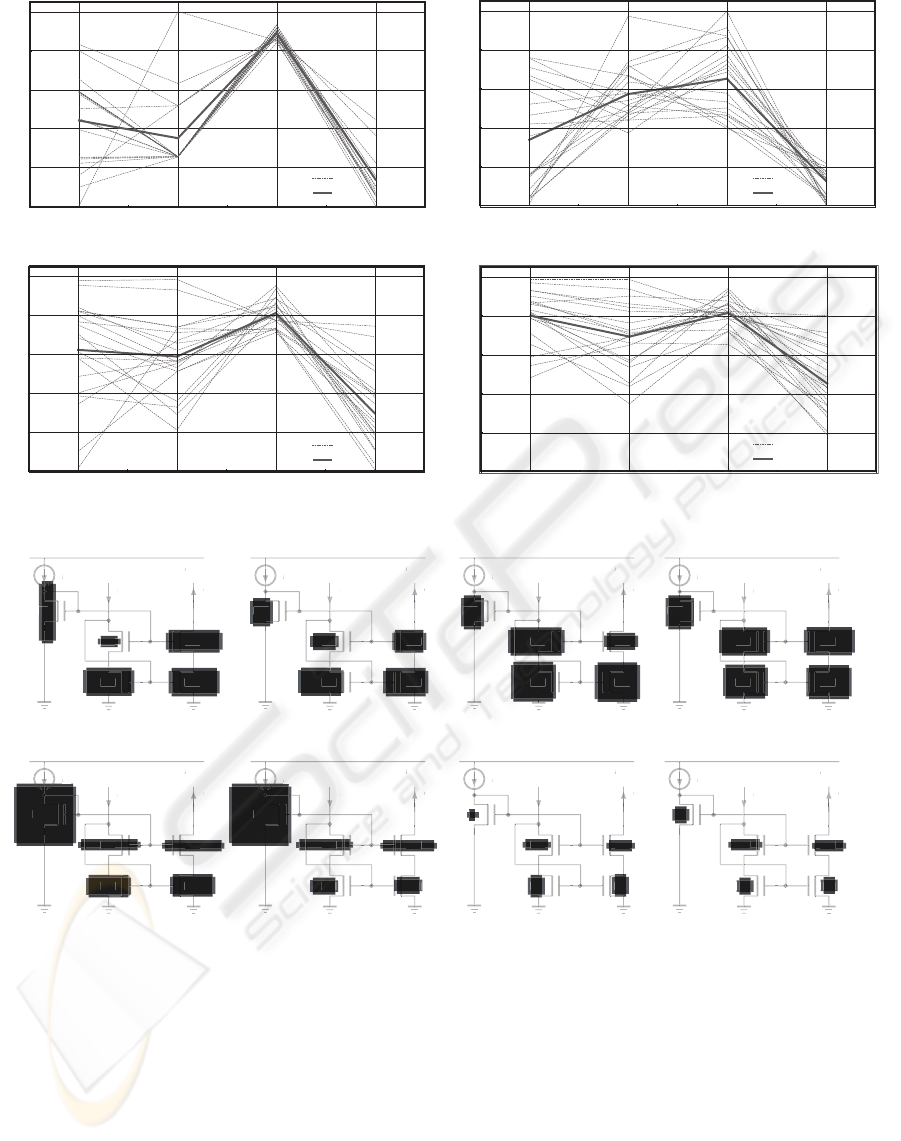
In the following, we analyze one successful evo-
lutionary process in detail. Figure 7 depicts an ex-
ample snapshot of the evolved best fitness individ-
ual on each generation. The transistor sizes of them
are described graphically. Given the initial random
population, the system searches the set of parameters
having higher fitness value for a while. At the 31st
AUTOMATED SIZING OF ANALOG CIRCUITS BASED ON GENETIC ALGORITHM WITH PARAMETER
ORTHOGONALIZATION PROCEDURE
197
0
0.2
0.4
0.6
0.8
1
0
0.2
0.4
0.6
0.8
1
0
0.2
0.4
0.6
0.8
1
0
0.2
0.4
0.6
0.8
1
(a) (b)
(c) (d)
F
1
F
2
F
3
F
F
1
F
2
F
3
F
F
1
F
2
F
3
F
Best individual fitness (20 runs)
Average for 20 runs
Best individual fitness (20 runs)
Average for 20 runs
Best individual fitness (20 runs)
Average for 20 runs
Best individual fitness (20 runs)
Average for 20 runs
F
1
F
2
F
3
F
Normalized fitness
Normalized fitness
Normalized fitness
Normalized fitness
Figure 6: Performance of evolved circuits.
V
DD
V
V
I
ref
I
I
Tr5
Tr1
I
out
I
I
I
in
I
I
V
DD
V
V
I
ref
I
I
I
out
I
I
I
in
II
V
DD
V
V
I
ref
I
I
I
out
I
I
I
in
II
V
DD
V
V
I
ref
I
I
I
out
I
I
I
in
II
V
DD
V
V
I
ref
II
I
out
II
I
in
I
I
V
DD
V
V
I
ref
I
I
I
out
II
I
in
I
I
V
DD
V
V
I
ref
I
I
Tr5
I
out
II
I
in
I
I
Tr3
Tr4
V
DD
V
V
I
ref
II
Tr5
I
out
I
I
I
in
I
I
Tr3
Tr4
0th generation 31st generation
108th generation
11th generation
Tr1
Tr1
Tr1
Tr1
Tr1
Tr1
Tr1
Tr1
Tr2
Tr2
Tr2
Tr2
Tr3
Tr3
Tr3
Tr3
Tr4
Tr4
Tr4
Tr4
Tr5
Tr5
Tr5
Tr5
Tr5
Tr5
Tr5
21st generation
51st generation 81st generation 101st generation
Tr1
Tr1
Tr1
Tr1
Tr1
Tr1
Tr1
Tr1
Tr1
Tr1
Tr1
Tr1
Tr2
Tr2
Tr2
Tr2
Tr2
Tr2
Tr2
Tr2
Tr2
Tr2
Tr2
Tr2
Tr3
Tr3
Tr3
Tr3
Tr3
Tr3
Tr3
Tr3
Tr4
Tr4
Tr4
Tr4
Tr4
Tr4
Tr4
Tr4
Tr4
Tr5
Tr5
ref
Tr5
ref
Tr5
Tr5
Tr5
Tr5
Tr5
Figure 7: Best fitness individual transition.
generation, the system finds a set of parameters such
that (W1,L1,W3,L3) = (W2, L2,W4,L4), which is
known as the proper setting of this structure. After
that, the evolution process further improves the per-
formance by changing a set of parameters. We can see
that the best fitness individuals after the 31st genera-
tion have a tendency of keeping the above ratio since
the parameter orthogonalization procedure is period-
ically performed to correct the search space. And fi-
nally, the system reaches the optimal solution at the
108th generation. This result shows that the PCA-
based search space correction method works well and
the system can find the optimal solutions effectively.
4 CONCLUSIONS
In this paper, we have presented a possibility of the
GA-based analog circuit sizing system and its perfor-
mance improvement using PCA-based orthogonaliza-
tion procedure. An experimental synthesis of a wide-
swing current mirror circuit demonstrates the poten-
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
198

tial capability of the proposed system to optimize
analog-digital-mixed architectures without using ex-
pert knowledge of transistor-level circuits.
The experimental result also suggests a possibil-
ity of constructing intelligent circuit synthesis sys-
tems, which may evolve its ability by accumulat-
ing design experience. By introducing the guidelines
for reusing suitable individuals, the proposed system
could achieve more significant results.
ACKNOWLEDGEMENTS
This work was supported by Grant-in-Aid for Young
Scientists (B) (No. 18700044) from The Ministry of
Education,Culture,Sports,Science and Technology.
REFERENCES
Back, T., Hammel, U., and Schwefel, P. H. (1997). Evo-
lutionary computation: Comments on the history and
current state. IEEE Trans. Evolutionary Computation,
1(1):3 – 13.
Eshelman, L. J. and Schaffer, J. D. (1993). Real-coded ge-
netic algorithms and interval schemata. Foundations
of genetic algorithms 2, pages 187 – 202.
Goldberg, D. (1989). Genetic Algorithms in Search, Op-
timization and Machine Learning. Addison-Wasley
Publishing Company.
Gray, P. R., Hurst, P. J., Lewis, S. H., and Meyer, R. G.
(2001). Analysis and Design of Analog Integrated
Circuits (Fourth Edition). John Wiley & Sons.
Holland, J. H. (1975). Adaptation in Natural and Artificial
Systems. University of Michigan Press.
Homma, N., Aoki, T., and Higuchi, T. (2000). Evolution-
ary synthesis of fast constant-coefficient multipliers.
IEICE Trans. Fundamentals, E83-A(9):1767–1777.
Homma, N., Aoki, T., and Higuchi, T. (2002). Evolutionary
graph generation system with transmigration capabil-
ity and its application to arithmetic circuit synthesis.
IEE Proc. Circuits Devices Syst., 149(2):97 – 104.
Jolliffe, I. T. (2002). Principal Component Analysis.
Springer.
Koza, R. J., III, Bennett, H. F., Andre, D., Keane, A. M.,
and Dunlap, F. (1997). Automated synthesis of analog
electrical circuits by means of genetic programming.
IEEE Trans. Evolutionary Computation, 1(2):109 –
128.
Lohn, D. J. and Colombano, S. P. (1999). A circuit represen-
tation technique for automated circuit design. IEEE
Trans. Evolutionary Computation, 3(3):205 – 219.
Natsui, M., Homma, N., Aoki, T., and Higuchi, T. (2005).
Design of multiple-valued logic circuits using graph-
based evolutionary synthesis. Journal of Multiple-
Valued Logic and Soft Computing, 11(5-6):519 – 544.
Natsui, M., Tadokoro, Y., Homma, N., Aoki, T., and
Higuchi, T. (2007). Synthesis of current mirrors based
on evolutionary graph generation with transmigration
capability. IEICE Electronics Express, 4(3):88 – 93.
Shibata, H. and Fujii, N. (2001). An evolutionary syn-
thesis of analog active circuits using current path
based coding. IEICE Trans. on Fundamentals, E84-
A(10):2561–2568.
Somani, A., Chakrabarti, P., and Patra, A. (2007). An evo-
lutionary algorithm-based approach to automated de-
sign of analog and rf circuits using adaptive normal-
ized cost functions. IEEE Trans. Evolutionary Com-
putation, 11(3):336 – 353.
AUTOMATED SIZING OF ANALOG CIRCUITS BASED ON GENETIC ALGORITHM WITH PARAMETER
ORTHOGONALIZATION PROCEDURE
199
