
ALTITUDE CONTROL OF SMALL HELICOPTERS USING A
PROTOTYPE TEST BED
Nikos I. Vitzilaios and Nikos C. Tsourveloudis
Intelligent Systems & Robotics Laboratory, Technical University of Crete, Chania, Greece
Keywords: Unmanned Helicopters, Experimental Test Bed, Altitude Control, Fuzzy Control, Aerial Robotics.
Abstract: In this paper we present an experimental test bed for the development and evaluation of control systems for
unmanned helicopters. The test bed consists of a small unmanned helicopter, mounted on a flying stand that
permits all possible movements but prevents the helicopter from damaging or crashing. A fuzzy controller is
developed in MATLAB and tested in the helicopter using the test bed. The controller is able to perform
hovering and altitude control. Experimental results are presented for various test cases.
1 INTRODUCTION
Unmanned helicopters are the most flexible flying
machines among the variety of UAVs (Unmanned
Aerial Vehicles), since they have the ability to take
off and land vertically as well as to perform
aggressive maneuvers and hovering, which gives
them the advantage of effective observation from
various positions. These advantages along with the
continuous development of robotic vehicles’
technology have led to the use of unmanned
helicopters in many applications, both civil and
military, such as surveillance, traffic management,
land management, border patrol, and search and
rescue missions. As a result, there has been
remarkable growth in the market of unmanned
helicopters (aka VTOL UAVs for Vertical Take-Off
and Landing UAVs), which nowadays includes
vehicles of various types, sizes and operational
capabilities (Spanoudakis et al., 2003). During the
last years, small scale (about 1500 mm in length)
helicopters are preferred for development and
experimentation due to their low cost and
expendability.
Although small scale unmanned helicopters offer
as experimentation platforms the advantages of low
cost and easy operation, the development of
autonomous navigation systems for such vehicles is
a difficult and dangerous procedure that may
increase this overall cost, since except from the
equipment needed (helicopter, sensors, telemetry
systems etc) one should add the cost of crashes and
damages that may occur during experimentation.
Since helicopters are very unstable and difficult to
control, experimentation on real vehicles often result
in damaging accidents. For this reason, the
development of an autonomous navigation controller
begins with numerous tests in a software-based
simulation environment. In this environment,
controllers are evaluated for their ability to control
efficiently the helicopter. If the simulation results
are encouraging, the controller may be tested on the
real vehicle.
The simulation procedure has drawbacks as well.
At first, the simulation environment cannot imitate
helicopter’s navigation in detail with all possible
environmental disturbances. Therefore, a controller
that seems to work satisfactorily in the simulation
may be insufficient for the navigation of the real
vehicle in a real environment. Moreover,
independently of any simulation evaluation,
first/initial tests with a real vehicle generally are the
most dangerous, since a lot of unexpected problems
may arise at this time. As a result, it would be
desirable to test the controller on a real vehicle but
in a safe environment, without having the danger of
crashing and destroying the equipment or harm
people that monitor the flight.
In the past years, there have been proposed ways
of testing controllers on a real vehicle safely.
Normally there is a mechanical construction where a
real helicopter (or a simplified model of it) can fly
indoors without crashing or harming the humans
involved in the experimentation.
In the literature we meet constructions that
simulate a real helicopter. In (Tanaka, Ohtake, and
77
I. Vitzilaios N. and C. Tsourveloudis N. (2008).
ALTITUDE CONTROL OF SMALL HELICOPTERS USING A PROTOTYPE TEST BED.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - RA, pages 77-84
DOI: 10.5220/0001493600770084
Copyright
c
SciTePress

Wang, 2004), a custom helicopter-like construction
whose degrees of freedom are reduced, is used for
the design and evaluation of a flight stabilization
controller. In (Andrievsky, Peaucelle, and Fradkov,
2007), a mechanical construction is used to emulate
the flying behavior of a helicopter. The experimental
setup consists of a base on which a long arm is
mounted that carries the helicopter body. Two
motors with propellers mounted on the helicopter
body can generate the force that causes the
helicopter body to lift off the ground. A similar test
bed is also used in (Kutay et al., 2005).
Further in the literature, we meet systems that use
real helicopters for the experiments. In (Dzul,
Lozano, and Castillo, 2004) and (Mancini et al.,
2007), a mechanical construction holds the
helicopter in a stable position allowing only small
and safe movements. Using mechanical limitations,
the helicopter is able to move in only one or two
axes and within limits. As a result the helicopter
cannot take any dangerous orientation or collide to
the ground.
The drawback of the work presented in the above
references, is that either a helicopter emulation
construction is used, or a real helicopter with
reduced degrees of freedom. In both cases, the
developed controller partially covers the control of
the vehicle in one or two axes and it is not sufficient
to fully control a helicopter in real conditions. The
motivation of this paper is the construction of a
laboratory test bed where small helicopters can be
safely (for both humans and the equipment involved)
used indoors for experimental validation without
limitations in helicopter’s movement. Indoor flying
gives the ability for continuous tests regardless of
weather conditions. Moreover, the suggested setup
minimizes the need for experienced helicopter pilots
within the research group. Flying small helicopters
requires pilot training which stems research efforts
towards autonomous helicopter flights.
In this paper we propose a fuzzy controller for the
altitude and hovering control of an unmanned
helicopter. The controller is developed using the
proposed test bed and is able to stabilize the
helicopter in desired positions (each position is
defined by horizontal and vertical coordinates).
Except from hovering at a desired altitude, the tasks
of autonomous take-off and landing are also
considered here.
In the literature there is previous work on the
autonomous altitude control of unmanned
helicopters. Usually altitude control is a part of an
autonomous navigation controller (Shin et al., 2005),
(Kim and Shim, 2003), where a subsystem dedicated
to altitude control cooperates with other subsystems
in order to navigate the helicopter. In (Kim et al.,
2004) an adaptive approach is proposed for altitude
control for an unmanned helicopter which utilizes
rotor RPM to track altitude commands. Significant
work has been done also in the field of autonomous
landing problem for unmanned helicopters
(Sapiralli, Sukhatme, and Montgomery, 2002),
(Merz, Duranti, and Conte, 2006).
This paper is organised as follows. In Section 2
we present the experimental test bed that we use in
order to develop the controller. Main parts and
systems of the test bed are presented as well as the
way this test bed works. In Section 3 we present a
fuzzy controller able to control the altitude of the
helicopter and perform hovering at a stable desired
position. In Section 4, experimental results are
presented and remarked. At last, a conclusion is
derived as well as future work on the subject is
suggested.
2 EXPERIMENTAL TEST BED
The laboratory test bed consists of three basic
elements; a customized flying stand, a customized
helicopter and a ground control station (Figure 1).
Helicopter with Avionics
Flying Stand
Control Station
Figure 1: View of the experimental test bed.
2.1 Helicopter Flying Stand
Helicopter flying stand is a mechanical construction
able to hold the helicopter, allowing full movements
(6 degrees of freedom) while protecting it from
damaging and crashing. It is a customized
construction based on a commercially available
flying stand that it is used by inexperienced pilots
for flight training.
The stand allows the helicopter move naturally
without any constraint around a 2.1m diameter circle
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
78

(Figure 6), flying forwards, backwards or sideways.
A gas strut is used to counterbalance the weight of
the stand. As a result the helicopter does not lift any
extra weight. In Figure 2, rotations as well as the
Euler angles of the helicopter are presented.
Since the test bed will be used for indoor
experiments, a positioning system must be
developed in order to know helicopter’s position
during testing. To avoid high cost indoor positioning
and localization systems, we utilize the rotary
movement of the central shaft of the stand. The
stand and consequently the helicopter move around a
circle (planar rotation at Figure 2, Figure 6) with a
rotation angle which may easily be monitored. For
this reason, we put a rotation encoder on the central
shaft of the stand (Figure 3). The encoder initializes
its position to zero and then gives signed numbers
that denote the current position relative to the initial
position. Positive numbers denote rotation to the left
while negative numbers denote rotation to the right
side. The rotation encoder gives the planar position
of the helicopter at each time instant.
Roll
Pitch
Planar
Rotation
Elevation
Rotation
Yaw
Figure 2: Euler angles and rotation axes.
Moreover, we need to know the altitude in which
the helicopter flies. The flying stand gives the ability
to the helicopter to fly at a maximum height of
60cm. An infrared sensor is used to monitor the
actual value of altitude. The sensor is mounted at the
lower part of the bracket that holds the helicopter, as
it is shown in Figure 3. The accuracy of the altitude
readings is less than 1cm, which is far better than the
accuracy of outdoor altimeters or GPS.
Rotation
Sensor
Altitude
Altitude Sensor
Figure 3: Positioning sensors.
2.2 Helicopter and Avionics
The VTOL that we use in our test bed is a
customization of a 50-size (1200 mm length, 405
mm height, 1350 mm main rotor diameter)
commercially available electric powered RC
helicopter. An important characteristic of this
helicopter is that it has electric motor so there is no
need for fuel gas, and therefore it does not produce
any exhaust gasses during its operation, which is
important for indoor testing. This helicopter has
been heavily customized in order to be ready for
experimental use. In what follows we describe the
additional equipment and avionics we have put on
board.
2.2.1 Inertial Measurement Unit (IMU)
This unit gives the orientation of the helicopter. The
unit consists of 3D gyroscopes, accelerometers and
magnetometers and outputs the 3 Euler angles (roll,
pitch and yaw). The IMU used is the commercial
MTi model of Xsens Motion Technologies. For the
communication between IMU and control station a
USB-serial data and power cable is used.
2.2.2 Digital Switch
This is the interface that manages the switching from
manual to autonomous flight. Manual flight is
controlled remotely by a human operator, while
autonomous flight is supervised by a Central
Processing Unit (CPU). Switching between manual
and autonomous flight is an important operation
because it allows the human tester to regain manual
control at any time instant during experimentation,
which is very useful in case of failure or insufficient
controller behaviour.
ALTITUDE CONTROL OF SMALL HELICOPTERS USING A PROTOTYPE TESTBED
79

2.2.3 Servo Driver/Controller
RC servos are the actuators used to control the
motion of the helicopter. In manual operation, the
onboard receiver forwards the transmitter commands
to servos by sending appropriate PWM signals. In
order to send such signals from the control station to
the servos, a servo driver is needed. For that reason a
PIC microcontroller is used, which translates control
signals from the ground station to RC PWM servo
signals and drives the servos. Further, the PIC reads
the input from the localization system (x-y position,
altitude) and transmits it to the control station.
2.2.4 Communication System
A wireless communication system has been
established between the control station and the PIC
microcontroller. Having 2 receiver/transmitter units
(one on the helicopter and one on the ground station)
and by using the Bluetooth protocol, we obtain two-
way communication between the serial port of the
PIC and the serial port of the control station.
2.2.5 Power System
The electric helicopter has high power consumption.
During hovering, the electric motor needs about 50A
current of 25V. Normally in these helicopters, LiPo
batteries are used that have high capacity and the
ability to sustain big currents. With this consumption
and with a high capacity LiPo battery, the helicopter
can perform hovering for about 15 minutes. To
overcome this limitation in the duration of
experiments, the test bed is provided with constant
power supply of 24V that gives continuous current
to the helicopter.
2.3 Ground Control Station
Since our test bed works indoor and we can have all
the signals through wireless communication (expect
from the IMU), there is no need to put any processor
unit onboard. For this reason we use portable CPU
which serves as the “control station”. Because of this
solution, the helicopter has fewer payloads to lift,
while the control station has increased processing
power able to run control algorithms at high speeds.
In Figure 4 a block diagram presents the
connections of the equipment and the data
transmission through these connections, for each
subsystem (flying stand, helicopter and control
station).
Figure 4: System Architecture.
3 ALTITUDE & HOVERING
CONTROL
The controller developed and tested in the test bed is
a fuzzy controller for altitude and hovering control.
The objective of the controller is to hold stable the
helicopter at a predefined horizontal position and
altitude.
Roll Angle
Position Error
Altitude Error
Rule Base
-150 -100 -50 0 50 100 150
0
0.2
0.4
0.6
0.8
1
angle-error
Degree of
membership
LB L Zero R RBLS RS
-150 -100 -50 0 50 100 150
0
0.2
0.4
0.6
0.8
1
angle-error
Degree of
membership
LB L Zero R RBLS RS
-150 -100 -50 0 50 100 150
0
0.2
0.4
0.6
0.8
1
angle-error
Degree of
membership
LB L Zero R RBLS RS
Aileron
Throttle
Elevator
Change of
Position Error
Pitch Angle
0 0.1 0.2 0.3 0.4 0.5 0. 6 0.7 0.8 0.9 1
0
0.2
0.4
0.6
0.8
1
Front-C
Degree of m embe rship
N-P H
0 0. 1 0.2 0.3 0.4 0.5 0. 6 0. 7 0.8 0.9 1
0
0.2
0.4
0.6
0.8
1
Front-C
Degree of membership
N-P H
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0.2
0.4
0.6
0.8
1
Front-C
Degree of membership
N-P H
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0.2
0.4
0.6
0.8
1
Front-C
Degree of membership
N-P H
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0.2
0.4
0.6
0.8
1
Front-C
Degree of membership
N-P H
Figure 5: Hovering and Altitude Fuzzy controller.
3.1 Fuzzy Controller
A fuzzy controller of the Mamdani type has been
designed and implemented (Figure 5) in the
MATLAB environment. The objective of this
controller is to keep the helicopter “hovering” at
predefined positions subject to wind and other
disturbances.
As shown in Figure 5, the inputs of the fuzzy
controller are the roll and pitch angles of the
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
80

helicopter at every time instant, as well as the
position error, the change of position error and the
altitude error. In Figure 6 we show the
representation of the position error input, which is
defined as the difference between the current
horizontal position and the target horizontal position.
Position Error
Target
1.05m
Figure 6: Position error representation.
As position error represents how far the
helicopter is from the target point, the change of
position error represents the way that position error
changes and if the helicopter reaches the target point
or moves away from it. The altitude error is also
calculated as the difference between the current and
the target altitude. The outputs of the controller are
the change of the roll and pitch angles (aileron and
elevator variables respectively), as well as the
change in the throttle of the helicopter.
Roll angle is given by the IMU in real time.
Although the flying stand permits roll angles from
-30
o
to 30
o
, the flight control system takes as input
degrees from -90
o
to 90
o
. The linguistic variables
that represent the roll angle are: left big (LB), left
(L), zero (ZERO), right (R), right big (RB), and their
membership functions are shown in Figure 7.
The second input variable is the pitch angle of the
helicopter. The linguistic variables for this input are:
back big (BB), back (B), zero (ZERO), front (F),
front big (FB), with membership functions also
presented in Figure 7.
The third input variable is the position error,
which is defined as the difference between the
current and the desirable position. Since for safety
reasons we do not want the stand to rotate out of its
limits (-180
o
to 180
o
which corresponds to -30 to 30
in odometer units) we set the range of the position
error variable to be between -30 to 30 (in odometer
units). The linguistic variables for these inputs are:
negative big (NB), negative (N), zero (ZERO),
positive (P), positive big (PB) (Figure 7).
-80 -60 -40 -20 0 20 40 60 80
0
0.2
0.4
0.6
0.8
1
Roll angle (deg)
LB
RB
L
ZERO
R
-80 -60 -40 -20 0 20 40 60 80
0
0.2
0.4
0.6
0.8
1
Pitch angle (deg)
B
ZERO F
BB FB
-40 -30 -20 -10 0 10 20 30 40
0
0.2
0.4
0.6
0.8
1
Position Error
ZERO
NB PB
N
P
-6 -4 -2 0 2 4 6
0
0.2
0.4
0.6
0.8
1
Change of Position Error
ZERO
NP
-30 -20 -10 0 10 20 30
0
0.2
0.4
0.6
0.8
1
Altitude (cm)
D
L
H
Figure 7: Membership functions for input variables.
The next input in the fuzzy controller is the
change of position error. While position error shows
how far the helicopter is from the desire position,
change of position error shows how fast the vehicle
is moving towards or away from the desired point.
This input is defined as the difference (in odometer
units) between the previous position error and the
current position error, and it is represented by the
linguistic variables: negative (N), zero (ZERO),
positive (P) (Figure 7).
The last input is the altitude error input. This
input represents the difference in cm between actual
and desired altitude by counting if the helicopter is
placed lower or higher than the desired position. The
linguistic variables for this input are: lower (L),
desired (D), higher (H) (Figure 7).
The outputs of the fuzzy controller are the
changes of roll and pitch angles (Aileron and
Elevator movements respectively) and Throttle
change. The membership functions of aileron,
elevator and throttle, are presented in Figure 8. The
linguistic variables for aileron are left big (LB), left
(L), left small (LS), zero (ZERO), right small (RS),
right (R) and right big (RB). The linguistic variables
for elevator are back big (BB), back (B), zero
(ZERO), front (
F) and front big (FB). Both aileron
and elevator output values are presented in control
signal units.
ALTITUDE CONTROL OF SMALL HELICOPTERS USING A PROTOTYPE TESTBED
81
-0.6 -0.45 -0.3 -0.15 0 0.15 0.3 0.45 0.6
0
0.2
0.4
0.6
0.8
1
Aileron
ZERO
LB
RB
L
R
LS
RS
-0.6 -0.45 -0.3 -0.15 0 0.15 0.3 0.45 0.6
0
0.2
0.4
0.6
0.8
1
Elevator
BB
FB
ZERO
B
F
-6 -4 -2 0 2 4 6
0
0.2
0.4
0.6
0.8
1
Throttle
ZERONP
Figure 8: Membership functions for output variables.
The linguistic variables for throttle change are
negative (N), zero (ZERO) and positive (P). The
values of throttle output are also presented in control
signal units. Negative output reduces throttle of the
helicopter while positive output increases it.
It should be noted that in order to simplify the
experimentation the yaw angle of the helicopter was
set to zero. This is due to the fact that the yaw angle
(tail movements) is usually stabilized in these
helicopters by a gyro mechanism.
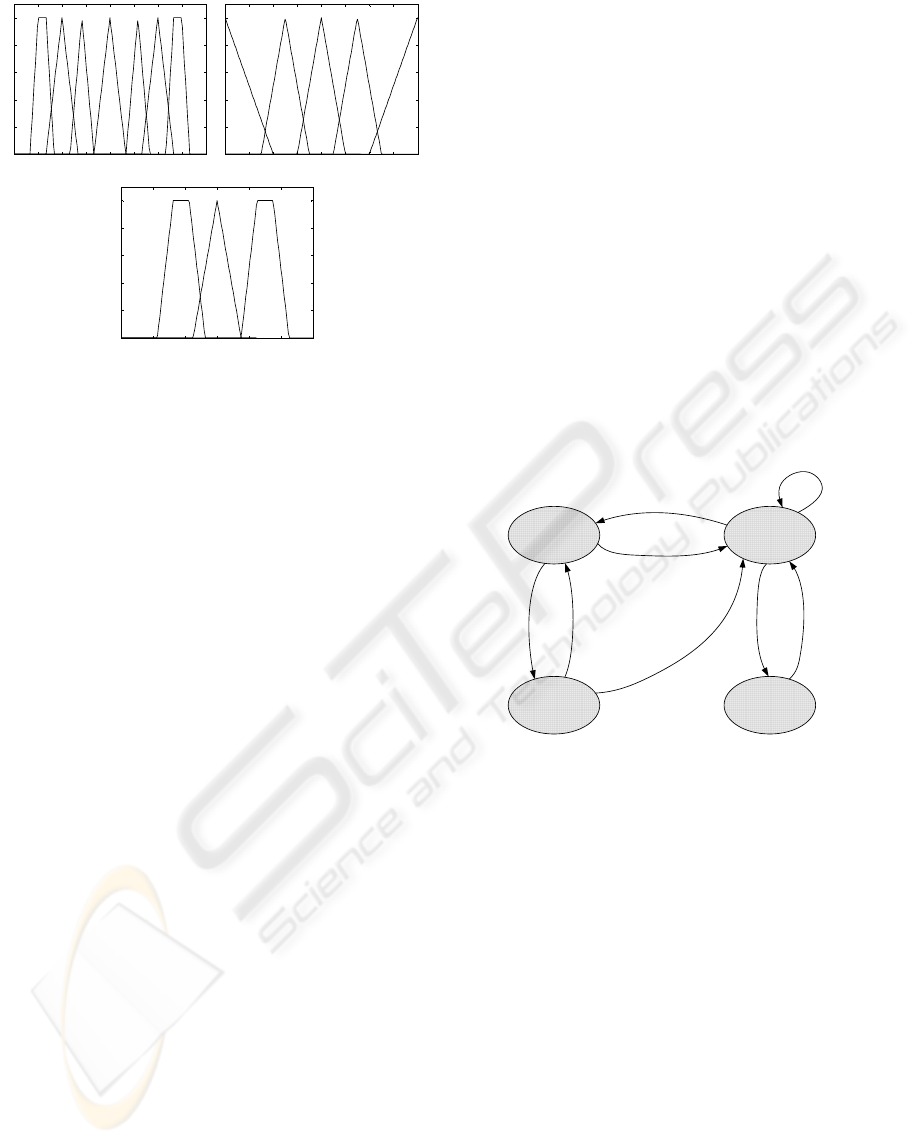
3.2 Control Rules
The control objective in the experiments performed
was the stabilization of helicopter at a certain point
(defined by horizontal and vertical target
coordinates). The transition between the states of the
controller is presented in Figure 9, while in Figure
10 the pseudo-code that describes the control
scheme is shown. After take-off, the controller has
as a target to hover the helicopter. Then checks
actual horizontal position and drives the helicopter
to the desired one. The next step is checking of
actual altitude in order to drive the helicopter to the
desired one. After some iterations where the
helicopter hovers in the target point, the controller
lands it.
For the implementation of this scheme, three sets
(rule bases) of fuzzy IF-THEN rules were used. The
one was responsible for the control of the pitch
angle. The target was to keep the pitch angle always
close to zero as this is what needs to be done when
the helicopter hovers. This was achieved with simple
rules of the form: <IF Pitch is X THEN Elevator is
Y>, where X, Y represent the membership function of
pitch and elevator, respectively.
The second rule base contains rules of the form:
<IF Roll is A AND position error is B AND change
of position error is C THEN aileron is D>. These
rules lead the helicopter towards the desired point as
they tend to minimize the distance between the
helicopter’s horizontal position at each moment and
the desired one. This is a typical PD-like fuzzy
controller with one extra input: the roll angle.
The third rule base is responsible for handling
the throttle of the helicopter. The policy we follow
here is that the changes in the throttle of the
helicopter occur only when the helicopter is in stable
hovering attitude on the desired horizontal position
(roll and pitch angles are close to zero, change of
position error is close to zero) or when the altitude
becomes higher than a top safety limit. The rules of
this rule base have the form <IF Roll is A AND
position error is B AND change of position error is
C AND Altitude is D THEN throttle is E>.
TAKE-OFF
AND
LANDING
HOVERING
HORIZONTAL
TARGET
VERTICAL
TARGET
ATTITUDE
NOT STABLE
ATTITUDE
STABLE
TARGET
REACHED
TARGET
REACHED
TARGET
NOT REACHED
TAKE-OFF
LANDING
TARGET
NOT REACHED
Figure 9: Controller state transition.
If attitude is not stable
Stabilize helicopter to hovering
Else
If current horizontal position is not the
desired
Drive helicopter to the desired
horizontal position
Else
If Current Altitude is not the desired
Change throttle in order to reach
target altitude
Else
Hovering
End IF
End If
End If
Figure 10: Pseudo code of the hovering controller.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
82

4 EXPERIMENTAL RESULTS
Experimental results for two test cases may be seen
in Figures 11 and 12. In these figures Roll and Pitch
values are measured in degrees, while Position
Error and Change of Position Error are measured in
odometer units (here, 1 odometer unit corresponds to
6 degrees) and Altitude is measured in centimetres.
Elevator, Aileron and Throttle values are measured
in control signals (values that PIC accepts as input
and automatically translates into servo signals). The
initial altitude of the helicopter (when the flying
stand is on the ground) is 10cm, since in this altitude
the infrared sensor is mounted to the stand.
0 100 200 300 400 500
-20
0
20
Roll
(deg)
0 100 200 300 400 500
-20
0
20
Pitch
(deg)
0 100 200 300 400 500
-20
0
20
Position
Error
0 100 200 300 400 500
-4
0
4
Change of
Pos Error
0 100 200 300 400 500
10
20
30
Altitude
(cm )
0 100 200 300 400 500
-0.5
0
0.5
Aileron
0 100 200 300 400 500
-0.5
0
0.5
Elevator
0 100 200 300 400 500
-4
0
4
Throttle
Iterations
Figure 11: Experimental results for test case 1.
In test case 1 (Figure 11) the ability of the
controller to perform autonomous take-off and keep
the helicopter in a hovering state, is evaluated. The
helicopter is placed on the desired horizontal
position by the human operator and then the
autopilot takes over with a target altitude of about 22
cm. As it can be seen in Figure 11, the controller
keeps roll and pitch angles close to zero and
gradually increases throttle in order to increase the
altitude and reach the target one. When the target
altitude is reached few oscillations around the target
horizontal position occur but the controller manages
to hold the helicopter in hovering in the desired
position. In the beginning, it is clear that position
error tends to be a small positive number, which
means that the helicopter always drifts to the left of
the desired position. This is explained by the
position of the test bed area which is close to the
walls of the building. Air flow from the main rotor
of the helicopter circles through the walls and return
as a disturbance to the helicopter. This air flow gives
a small drift to helicopter to the left. The developed
controller seems to recognize this disturbance and
make corrections in order to hold stable the
helicopter in the desired position.
0 50 100 150 200 250 300 350
-50
0
50
Roll
(deg)
0 50 100 150 200 250 300 350
-20
0
20
Pitch
(deg)
0 50 100 150 200 250 300 350
-20
0
20
Position
Error
0 50 100 150 200 250 300 350
-2
0
2
Change of
Pos Error
0 50 100 150 200 250 300 350
10
20
30
Altitude
(cm )
0 50 100 150 200 250 300 350
-0.5
0
0.5
Aileron
0 50 100 150 200 250 300 350
-0.5
0
0.5
Elevator
0 50 100 150 200 250 300 350
-4
0
4
Throttle
Iterations
Figure 12: Experimental results for test case 2.
In Figure 12 we present the results of test case 2.
In this test, the initial position of the helicopter is
different from the desired one and the controller
objective is to drive the helicopter to the desired
ALTITUDE CONTROL OF SMALL HELICOPTERS USING A PROTOTYPE TESTBED
83

position and then land it autonomously. The
helicopter is placed manually to a random position
and then the fuzzy autopilot gains control of the
helicopter. As one may see in the Position Error plot
of Figure 12, the helicopter moves manually from its
initial position to a random position. At time instant
50, the autopilot gains control of the vehicle. The
target of the autopilot is to move the helicopter to
the initial position and in 20 cm altitude. It is clear
that the autopilot drives the helicopter to the target
point by moving it to the desired horizontal position
at first and then by raising the altitude until the
targeted one has been reached. After a few iterations
that the target position has been reached, the
controller reduces the throttle and lands the
helicopter. Small oscillations occur while the
autopilot tries to keep the helicopter in stable
position. It is also clear, as in test case 1, that we
face the air disturbance that causes small drift in the
helicopter in this test case too.
5 CONCLUSIONS
In this paper we presented a fuzzy controller for
hovering and altitude control of a small-scale
helicopter. The controller was developed and tested
on a custom made laboratory experimental test bed,
where tests on unmanned helicopters can be
performed with safety. The test bed works indoors,
is independent of power supply and can be used for
continuous tests. The development of the controller
is done on a real helicopter and not in simulation, so
we can have direct and reliable results. The
experimental results show that this setup works well.
Experimental results from the evaluation of the
altitude fuzzy controller were presented.
Future work, involves development of other kinds
of controllers which will be tested and evaluated on
the test bed. This work will lead to a comparison of
controllers based on their efficiency and ability to
control successfully an unmanned helicopter.
ACKNOWLEDGEMENTS
This paper is part of the 03ED365 research project,
implemented within the framework of the
“Reinforcement Programme of Human Research
Manpower” (PENED) and co-financed by National
and Community Funds (75% from E.U.-European
Social Fund and 25% from the Greek Ministry of
Development-General Secretariat of Research and
Technology).
REFERENCES
Andrievsky, B., Peaucelle, D., and Fradkov, A., 2007.
Adaptive control of 3DOF motion for LAAS
helicopter benchmark: Design and experiments. In
Proceedings of the 2007 American Control
Conference, New York City, USA.
Dzul, A., Lozano, R., and Castillo, P., 2004. Adaptive
control for a radio-controlled helicopter in a vertical
flying stand. International Journal of Adaptive
Control and Signal Processing, 18:473-485.
Kim, H., and Shim, D., 2003. A flight control system for
aerial robots: algorithms and experiments. Control
Engineering Practice, 11:1389-1400.
Kim, N., Calise, A., Corban, J. E., and Prasad, J. V. R.,
2004. Adaptive output feedback for altitude control for
an unmanned helicopter using rotor RPM. In
Proceedings of AIAA Guidance, Navigation, and
Control Conference and Exhibit, Rhode Island, USA.
Kutay, A., Calise, A., Idan, M., and Hovakimyan, N.,
2005. Experimental results on adaptive output
feedback control using a laboratory model helicopter.
IEEE Transactions on Control Systems Technology,
13:196-202.
Mancini, A., Caponetti, F., Monteriu, A., Frontoni, E.,
Zingaretti, P., and Longhi, S., 2007. Safe flying for an
UAV helicopter. In Proceedings of the 15th
Mediterranean Conference on Control & Automation,
Athens, Greece.
Merz, T., Duranti, S., and Conte, G., 2006. Autonomous
landing of an unmanned helicopter based on vision
and inertial sensing. Experimental Robotics IX, pp.
343-352.
Sapiralli, S., Sukhatme, G., and Montgomery J., 2002. An
experimental study of the autonomous helicopter
landing problem. In Proceedings of the International
Symposium on Experimental Robotics, Italy.
Shin, J., Nonami, K., Fujiwara, D., and Hazawa, K., 2005.
Model-based optimal attitude and positioning control
of small-scale unmanned helicopter. Robotica, 23:51-63.
Spanoudakis, P., Doitsidis, L., Tsourveloudis, N., and
Valavanis, K., 2003. The market for VTOL UAVs.
Unmanned Systems Magazine, Sept/Oct, pp. 14-18.
Tanaka, K., Ohtake, H., and Wang, H., 2004. A practical
design approach to stabilization of a 3-DOF RC
helicopter. IEEE Transactions on Control Systems
Technology, 12:315-325.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
84
