
A
PERCEPTUAL MOTOR CONTROL MODEL BASED ON OUTPUT
FEEDBACK ADAPTIVE CONTROL THEORY
Hirofumi Ohtsuka, Koki Shibasato
Department of Electronic Control, Kumamoto National College of Technology
2659-2 Suya, Koshi, Kumamoto, 861-1102, Japan
Shigeyasu Kawaji
Graduate School of Science and Technology, Kumamoto University
2-39-1 Kurokami, Kumamoto, 860-8555, Japan
Keywords:
Human-machine system, adaptive control, output feedback, perceptual motor system, cerebellum.
Abstract:
In this paper, a Perceptual Motor Control Model(PMCM) based on output feedback adaptive control theory is
considered from the viewpoint of voluntary movement such as hand-tracking control. We give an account of
the PMCM structure using together with both of the output feedback controller designed by using an almost
strict positive real characteristics for the controlled plant and the Smith predictor for plant with pure time
delay. In the proposed method, the attractive structural similarity exists between the cerebrum-cerebellum
neuro-motor signal feedback loop and the adaptive controller - compensators local minor feedback loop. The
proposed perceptual motor control model is evaluated through the comparison of between the experiment and
the simulation of for handling 1-link mechanism in order to track an indicator.
1 INTRODUCTION
The construction of collaborative human-machine
system is being recognized as an important technol-
ogy from the viewpoint of human centered assist-
ing system development (Takahashi and Ikeura, 2006;
Yamada and Utsugi, 2006). While such assisting sys-
tems aim at partial replacement of control task or
an amplification of control power, those have insuf-
ficiency in order to achieve the accurate maneuver-
ing, where human performs as a main controller in
the human-machine system. For the purpose of im-
provement of the maneuvering performance and the
response of human-machine system, authors have de-
veloped a new compensator named as ”collaborater”,
which can support the collaborative work of human
and machine (Ohtsuka et al., 2007). The model of hu-
man response behavior is required to design the col-
laborater and the collaborative assisting system, but
it has been difficult to construct an accurate model
of human perceptual motor control system (e.g., limb
and muscle). Kleinman et al. applied optimal con-
trol theory to develop a model of human behavior in
manual tracking tasks (Kleinman et al., 1970). Their
model contains time delay, a representation of neuro-
motor dynamics, and controller remnant as limita-
tions. Recently, Furuta considers that the analysis of
human control action is one of fundamental problems
in the study of human adaptive mechatronics (Furuta
et al., 2004). From such a viewpoint, in the authors’
previous study, Delayed Feed-Forward (DFF) Model
has been used for describing human’s hand-tracking
motion with visual information (Ishida and Sawada,
2003). The DFF model can realize the characteristics
that the limb motion, with prediction of target posi-
tion, makes the predicted value to minimize the tran-
sient error in the considering frequency range. How-
ever, for the non-cyclical target value and/or the con-
trolled machine output, it has been resulted in that
the DFF model has an insufficient reliance because
of the shortage of consideration through the experi-
mental study.
In this paper, for the upper limb motion in the
hand-tracking control, a new Perceptual Motor Con-
trol Model (PMCM) is considered. Namely, the visual
feedback controller is modeled as the output feed-
back type adaptive controller stabilizing the closed
loop system based on an Almost Strict Positive Real
(ASPR) characteristic of the controlled system. The
Parallel Feed-forward Compensator (PFC) has been
introduced in order to make an ASPR augmented sys-
tem (Iwai et al., 1993). And, Miall et al. have
115
Ohtsuka H., Shibasato K. and Kawaji S. (2008).
A PERCEPTUAL MOTOR CONTROL MODEL BASED ON OUTPUT FEEDBACK ADAPTIVE CONTROL THEORY.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - RA, pages 115-120
DOI: 10.5220/0001494301150120
Copyright
c
SciTePress
proposed a human’s brain model by introduction of
Smith Predictor (as forward internal model) in order
to predict the consequences of actions and to over-
come pure time delays of neuro-motor signal trans-
mission associated with feedback control (Miall et al.,
1993). So, taking into account of those approaches,
both PFC and Smith Predictor are located into the
minor feedback loop for the output feedback adap-
tive controller. So, the PMCM has similar structure
to the cerebrum-cerebellum neuro-motor signal feed-
back loop. The effectiveness of the proposed PMCM
is discussed through the comparison between the ex-
periment and simulation results.
2 OUTPUT FEEDBACK TYPE
ADAPTIVE CONTROL SYSTEM
In this section, as a preparation for discussion about
the PMCM of human, we briefly outline an output
feedback adaptive control method, where the con-
troller is designed to realize the plant output converg-
ing to reference signal. Let us consider the following
SISO plant:
˙x(t) = Ax(t) + bu(t)
y(t) = c
T
x(t)
(1)
where x is the nth order state vector, u and y are scalar
input and output, respectively. A, b and c are unknown
matrix and vectors with appropriate dimensions. The
transfer function form of the plant Eq.(1) is expressed
by
G(s) = c
T
(sI − A)
−1
b + d =
N(s)
D(s)
N(s) = b
m
s
m
+ b
m−1
s
m−1
+ · · · + b
1
s + b
0
D(s) = s
n
+ a
n−1
s
n−1
+ · · · + a
1
s + a
0
.
(2)
Now, we make the following assumption.
Assumption 1. The Plant Eq.(1) or Eq.(2) is
ASPR(Almost Strictly Positive real).
From this assumption, there exists a constant gain k
p
such that the transfer function
G
c
(s) = (1 + k
p
G(s))
−1
G(s) (3)
is SPR(Strictly Positive Real). Sufficient condition
for Assumption 1 can obtained, such that (1) N(s) is
Hurwitz polynomial, (2) γ = n− m ≤ 1, and (3) b
m
> 0
(Kaufman et al., 1998). Under the Assumption 1, the
following adaptive algorithm:
u(t) = k(t)e(t) (4)
˙
k(t) = ge(t)
2
(5)
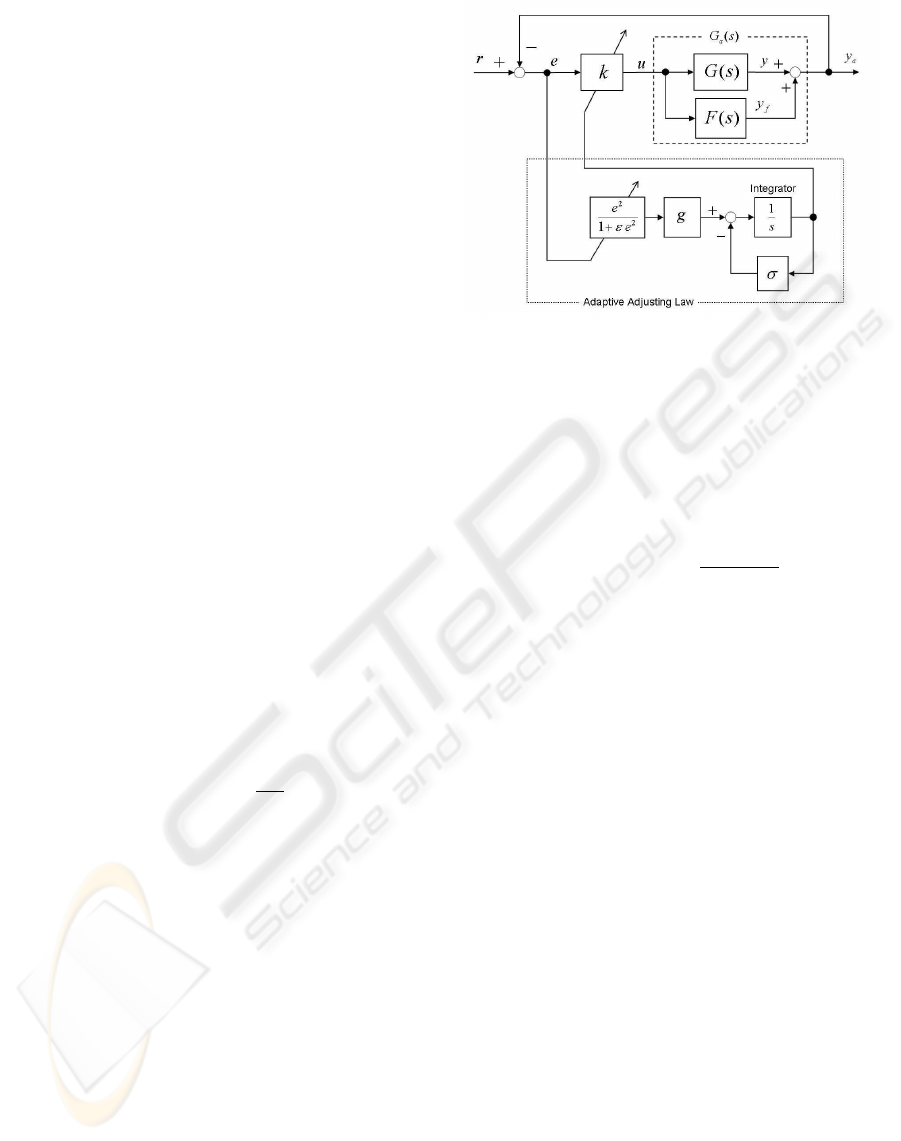
Figure 1: Adaptive Control System with PFC.
generates the control of the plant Eq.(1), where e(t) =
r(t) − y(t) and g is positive constant. And, it can
achieve the output error e(t) convergence to zero.
Furthermore, against to the input disturbance and to
the un-modeled dynamics of the plant, the following
modified adaptive adjusting law
˙
k(t) = −σk(t) + g
e(t)
2
1 + εe(t)
2
, (6)
can be utilized in order to maintain that the all sig-
nals in the closed loop system become uniformly ulti-
mate bounded (UUB), where σ and ε are given as suf-
ficiently small positive constants (Iwai et al., 1993).
However, Assumption 1 is not satisfied by most
practical systems with large relative degree γ > 1. To
overcome this problem, as shown in Fig.1, dynamic
compensator F(s) is introduced to construct the aug-
mented ASPR plant G
a
(s) = G(s) + F(s) satisfying
the above-stated sufficient condition. Thus, the out-
put feedback adaptive control law can be applied to
the augmented plant G
a
(s) and maintain the stability
of closed loop system. So, F(s), located in parallel
path for the plant, is called as parallel feedforward
compensator (PFC) (Kaufman et al., 1998).
3 PERCEPTUAL MOTOR
CONTROL MODEL
In the brain science research area, the cerebellum has
attracted the attention of theorists and modelers, and
the need for a unifying theory for the role of the cere-
bellum in motor control has been recognized for many
years (Miall et al., 1993; Ito, 1970; Wolpert et al.,
1998; Kleinman et al., 1970). Specially, based on
data from the control of the primate arm in visu-
ally guided tracking tasks (Fig.2), Miall et al. have
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
116

Figure 2: Human Body Dynamics.
Table 1: Parameters and Variables.
Notation Parameters and Variables
r(t) position of the target
y(t) position of the hand
v(t) command signal from the brain
δ
dead time in the nervous system from
the retina to the brain
ξ
dead time in the nervous system from
the brain to the muscle
τ
1
time constant of the brain
τ
2
time constant of the muscle dynamics
suggested that the cerebellum acts as a Smith Pre-
dictor, which is based on internal representation of
controlled object suffering with long and unavoidable
feedback delays. Ito et al. also suggested that there
exists the cerebrum-cerebellum neuro-motor signal
feedback loop (Fig.3) and the cerebellum may form
the internal model, based on physiological and clin-
ical evidence (Ito, 1970). There are two varieties of
internal model, i.e., forward model and inverse model
(Wolpert et al., 1998). Forward models capture the
forward or causal relationship between inputs to the
system, such as the arm, and the outputs. The Smith
predictor can be regarded as a kind of forward model.
While the problem of pure time delay can be over-
come by Smith predictor, the performance of visual
feedback control is mainly affected by the setting of
output feedback gain. However, conventional most
of neuro motor models have fixed the feedback gain
as constant. On the other hand, the adaptive control
methods, based on the ability of animal to adapt itself
to changes in its surroundings, have been developed.
Taking into account of both the concept of adap-
tive control method and the brain science researchers’
suggestions, let us construct a new perceptual motor
Figure 3: Cerebrum & Cerebellum (Ito, 1970).
control model as shown in Fig.4 for the control prob-
lem as shown in Fig.2, in which a human operator
controls the machine to follow the target. Here, the
time delay of nervous system transmission is success-
fully compensated by Smith predictor:
G
1
(s) − G
1
(s)e
−(δ+ζ)s
(7)
where G
1
(s) = G
P
(s)/(τ
2
s + 1).
Then, the controlled system from a side of the out-
put feedback adaptive controller becomes a series of
three elements. Namely, it consists a first lag ele-
ment with time constant τ
1
which is involved in brain
dynamics, a first lag element with time constant τ
2
which is involved in muscle dynamics, and a con-
trolled machine dynamics G
P
(s). In order to con-
struct a stable output feedback adaptive control sys-
tem, the ASPR compensation must be implemented
for G(s) = G
1
(s)/(τ
1
s + 1). So, suppose that the fol-
lowing assumption holds.
Assumption 2. G(s) satisfies that
(1) G(s) is minimum phase system.
(2) the relative degree γ is larger than 2.
(3) the nominal value of the leading coefficient b
m
of
G(s) is known.
Then, according to one of practical PFC design
method (Iwai et al., 1994), PFC:F(s) as shown in
Fig.5 can construct the augmented plant G(s) + F(s)
which satisfies the above-mentioned sufficient condi-
tion for Assumption 1. Here, δ is sufficiently small
positive constant, γ is a relative degree of G(s), α
i
are
positive constants and β
i
are coefficients of the Hur-
witz polynomial:
R(s) = β
γ−1
s
γ−1
+ · · · + β
1
s + β
0
, (8)
where β
0
is a leading coefficient of G(s). Both the
Smith predictor and PFC can be located into the mi-
A PERCEPTUAL MOTOR CONTROL MODEL BASED ON OUTPUT FEEDBACK ADAPTIVE CONTROL THEORY
117

Figure 4: Perceptual Motor Control Model.
Figure 5: Ladder Network Type PFC (Iwai et al., 1994)
nor feedback loop for the output feedback gain k ad-
justed by the adaptive algorithm Eq.(6) using e
a
(t)
instead of e(t). So, it ease to recognize that such mi-
nor feedback structure is very similar to the cerebrum-
cerebellum neuro-motor signal feedback loop model
in Fig.3. Thus, we can imagine that the Smith predic-
tor and PFC perform the role of cerebellum.
4 EVALUATION OF PMCM
Fig.6 shows the experimental equipment for the vir-
tually guided tracking task. An indicator shows the
target position, which is driven by AC motor 1, and
the operator controls a handle to follow the indicator.
AC motor 2 is assembled in order to generate the as-
Figure 6: Experimental Equipment.
sisting torque for the operator, while it performs as a
load inertia for human in this situation.
Mechanical System. From the experimental results
of automatic positioning control, the transfer function
of the one-link arm mechanism involving AC motor 2
was estimated as follows
G
P
(s) =
4213
s(s + 1)
(9)
Human Dynamics Model. Through the experimental
results, the parameters of human dynamics model are
estimated such that δ +ζ = 0.13[s], τ
1
= τ
2
= 0.03[s],
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
118

0 0.2 0.4 0.6 0.8 1 1.2
-5
0
5
10
15
20
25
30
35
Time [s]
Angle [degree]
Figure 7: Experimental Results.
0 0.2 0.4 0.6 0.8 1 1.2 1.4
-1
-0.5
0
0.5
1
Time[s]
Torque [Nm]
Figure 8: Input Torque (Experiment).
respectively (Saito and Nagasaki, 2002). In this case,
the controlled system from a side of the output feed-
back controller, which is the above-mentioned series
of three elements is given as follow.
G(s) =
4213
s(s + 1)(0.03s + 1)
2
(10)
PFC. Because G
1
(s) has a relative order as 3 and
minimum phase characteristics, for the simulation,
PFC is constructed as follows:
F(s) =
f
1
s
(τ
1
s + 1)(s + α)
2
+
f
2
s
(τ
1
s + 1)(s + α)
, (11)
where design parameters are given as f
1
= 350, f
2
=
6, α = 0.5.
Results of Experiment and Simulation. Experi-
mental results for the target position r(t) = 30 [de-
gree] are shown as Fig.7 and Fig.8. And, Fig.9 and
Fig.10 also shows the simulation results for the vari-
ance of design parameter g in Eq.(6). In the sim-
ulation, the other parameters in Eq.(6) are given as
0 0.2 0.4 0.6 0.8 1 1.2 1.4
-5
0
5
10
15
20
25
30
35
Time [s]
Angle [degree]
g=0.006
g=0.009
g=0.012
g=0.02
Figure 9: Simulation Results.
0 0.2 0.4 0.6 0.8 1 1.2 1.4
-1
-0.5
0
0.5
1
Time [s]
Input Torque [Nm]
g=0.006
g=0.009
g=0.012
g=0.02
Figure 10: Input Torque (Simulation).
k(0) = 0, σ = 0.1 and ε = 0.01. Although there exists
some fluctuation in the experimental results obtained
for three testors, we can recognize that the both re-
sponses are very similar. Because, by comparing be-
tween Fig.7 and Fig.9, the overshoots are almost same
level and the damping ratio and the values of peak
time are close resemblance. Furthermore, by com-
parison of Fig.8 and Fig.10, both signal wave forms
also show a close similarity. So, we can note that the
proposed model can maintain its good performance.
Furthermore, we can set up a hypothesis such that
the fluctuation in the response occurring every exper-
iment can be interpreted as the fluctuation of PMCM
parameters.
5 CONCLUSIONS
From the point aimed at the minor feedback loop in
the brain, i.e., the nervous network between the cere-
brum and the cerebellum performing minor feedback
A PERCEPTUAL MOTOR CONTROL MODEL BASED ON OUTPUT FEEDBACK ADAPTIVE CONTROL THEORY
119

loop element, and a hypothesis for cerebellum gen-
erating a forward model of motor apparatus dynam-
ics, a perceptual motor control model has been dis-
cussed. The proposed method is based on output feed
back type adaptive control using ASPR characteristics
of the controlled plant, which accompany with PFC.
In the nervous network, there necessarily exists dead
time (pure time delay) of signal transmission between
cortex and lower apparatus. To overcome the influ-
ence of the feedback of the sensed signal involving
time delay, the Smith predictor method is introduced.
From the viewpoint of the mutual connection be-
tween the cerebrum and the cerebellum, we showed
that the PFC and Smith predictor perform as cere-
bellum generating a forward model for the controlled
machine and human’s motor apparatus, and the adap-
tive controller performs as cerebrum adjusting the vi-
sual feedback control signal. The effectiveness of the
proposed model was examined through the compar-
ison between of experimental results and simulation
results for one-link arm positioning control problem.
And, it was confirmed that the proposed model can
represent the manual control response with sufficient
accuracy.
REFERENCES
Furuta, K., Iwase, M., and Hatakeyama, S. (2004).
Analysing saturating actuator in human-machine sys-
tem from view of human adaptive mechatronics. In
Proceedings of REDISCOVER 2004, Vol.1, (3-1)–(3-
9).
Ishida, F. and Sawada, Y. (2003). Quantitative studies of
phase lead phenomena in human perceptro-motor con-
trol system. In Trans. of SICE, Vol.39, No.1, 59-66.
Ito, M. (1970). Neurophysiological aspects of the cerebel-
lar motor control system. In International Journal of
Neurology, Vol. 7, 162-176.
Iwai, Z., Mizumoto, I., and Deng, M. (1994). A par-
allel feedforward compensator virtually realizing al-
most strictly positive real plant. In Proc. of 33
rd
IEEE
CDC, 2827-2832.
Iwai, Z., Mizumoto, I., and Ohtsuka, H. (1993). Robust
and simple adaptive control system design. In Inter-
national Journal of Adaptive Control and Signal Pro-
cessing, Vol.7, 163-181.
Kaufman, H., Bar-Kana, I., and Sobel, K. (1998). Direct
Adaptive Control Algorithms Theory and Application.
Springer-Verlag, New York, 2nd edition.
Kleinman, D. L., Baron, S., and Levison, W. H. (1970). An
optimal control model of human response part i: The-
ory and validation. In Automatica, Vol.6, 357-369.
Miall, R. C. ., Weier, D. J., Wolpert, D. M., and Stein, J. F.
(1993). Is the cerebellum a smith predictor ? In Jour-
nal of Motor Behavior, Vol.25, No.3, 203-216.
Ohtsuka, H., Shibasato, K., and Kawaji, S. (2007). Collab-
orative control of human-machine system by collabo-
rater. In Trans. of The Japan Society of Mechanical
Engineers, Series C, Vol.73, No.733, 2576-2582.
Saito, H. and Nagasaki, H. (2002). Clinical Kinesiology.
Ishiyaku Publishers, Inc., 3rd edition.
Takahashi, T. and Ikeura, R. (2006). Development of human
support system. In Journal of the Society of Instru-
ment and Control Engineers,Vol.45, No.5, 387-388.
Wolpert, D. M., Miall, R. C., and Kawato, M. (1998). Inter-
nal models in the cerebellum. In Trends in Cognitive
Sciences, Vol.2, No.9, 338-347.
Yamada, Y. and Utsugi, A. (2006). Human intention infer-
ence techniques in human machine systems and their
robotic applications. In Journal of the Society of In-
strument and Control Engineering, Vol.45, No.6, 407-
412.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
120
