
A KNOWLEDGE-BASED COMPONENT
FOR HUMAN-ROBOT TEAMWORK
Pedro Santana, Lu´ıs Correia
LabMAg, Computer Science Department, University of Lisbon, Portugal
M´ario Salgueiro, Vasco Santos
R&D Division, IntRoSys, S.A., Portugal
Jos´e Barata
UNINOVA, New University of Lisbon, Portugal
Keywords:
Human-robot teamwork, multi-agent systems, cooperative workflows, knowledge-based systems, demining.
Abstract:
Teams of humans and robots pose a new challenge to teamwork. This stems from the fact that robots and
humans have significantly different perceptual, reasoning, communication and actuation capabilities. This pa-
per contributes to solving this problem by proposing a knowledge-based multi-agent system to support design
and execution of stereotyped (i.e. recurring) human-robot teamwork. The cooperative workflow formalism
has been selected to specify team plans, and adapted to allow activities to share structured data, in a frequent
basis, while executing. This novel functionality enables tightly coupled interactions among team members.
Rather than focusing on automatic teamwork planning, this paper proposes a complementary and intuitive
knowledge-based solution for fast deployment and adaptation of small scale human-robot teams. In addition,
the system has been designed in order to provide information about the mission status, contributing this way
to the human overall mission awareness problem. A set of empirical results obtained from simulated and real
missions demonstrates the capabilities of the system.
1 INTRODUCTION
As highly appealing the idea of humans and robots
enrolling in teamwork might seem, their significantly
different perceptual, reasoning, and actuation capabil-
ities make the task a daunting one. Typically, human-
robot teamwork (Tambe, 1997; Scerri et al., 2002;
Sierhuis et al., 2005; Nourbakhsh et al., 2005; Sycara
and Sukthankar, 2006) solutions grow from work on
multi-robot and multi-agent systems adapted to in-
clude humans. This paper proposes to see the problem
from the other end, i.e. to include robots as partici-
pants on human-centred operational procedures, sup-
ported by knowledge management concepts usual in
human organisations. Both views are complementary
rather than mutually exclusive.
Human teamwork operational procedures are typ-
ically knowledge intensive tasks (Schreiber et al.,
2000), which can be approximately represented by a
set of templates. Knowledge engineering methodolo-
gies can be used to grasp and formalise domain ex-
perts’ knowledge into the form of templates. These
templates specify stereotyped (i.e. recurring) team
plans, which need to be adapted to the situation at
hand. Here, much of the work on automatic team-
work (re)planning (Sycara and Sukthankar, 2006)
can be employed. Nonetheless, visual interfaces
through which humans can manually adapt the plan
are paramount. See for instance that most of the clues
to detect and solve exceptions to a plan in complex
situations are not observable without complex tacit
human knowledge, which is continuously evolving as
the mission unfolds. Bearing this in mind, a formal-
ism that directly maps the plan and its visual repre-
sentation is essential. In addition to meet this require-
ment, workflows also have the advantage of being
common for the representation of activities in human
organisations, thus providing a natural integration of
robots in human knowledge intensive tasks.
Another benefit of considering a knowledge-based
228
Santana P., Correia L., Salgueiro M., Santos V. and Barata J. (2008).
A KNOWLEDGE-BASED COMPONENT FOR HUMAN-ROBOT TEAMWORK.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - RA, pages 228-233
DOI: 10.5220/0001497502280233
Copyright
c
SciTePress

component for human-robot teamwork is that actual
human-robot teams encompass few elements, mean-
ing that the cost of having one human taking care of
major strategic decisions for the entire team is pos-
sibly less than having the system taking uninformed
strategic decisions. In addition, providing humans
with a visual description of the mission state is es-
sential to improve their overall mission awareness
(refer to (Drury et al., 2003) for a thorough study
on the awareness topic in the human-robot interac-
tion domain). The need for this improvement is sug-
gested by the limitations of common map-centric and
video-centric interfaces on fostering mission aware-
ness (Drury et al., 2007).
The paper is organised as follows: Section 2
presents the knowledge-based concepts of the pro-
posed approach, whereas Section 3 describes the
multi-agent system for human-robot teamwork. In
Section 4, a case study is described, and a set of em-
pirical results, obtained from both simulated and real
experiments, are discussed. Finally, conclusions and
pointers to future work are given in Section 5.
2 KNOWLEDGE-BASED
APPROACH
Under the assumption of knowledge-based human-
robot teamwork, domain knowledge must be ac-
quired, formalised, adapted, and employed for the co-
ordination of team members performing a mission.
Such knowledge is mainly composed of mission tem-
plates specified by a domain expert in terms of work-
flows. Mission templates are then adapted and instan-
tiated by the mission coordinator (a human) to the ac-
tual team on field, in order to build an operational
team plan. That is, physical entities (i.e. robots and
humans) are assigned to participants in the mission
template. The proposed approach is composed of four
major steps, namely:
Mission Template Specification. Mission templates
are knowledge intensive tasks specifications, i.e.
domain knowledge, maintained in a knowledge
base supported by a well specified ontology. Mis-
sion templates are non operational team plans, in
the sense that: (1) on field adaptations to the tem-
plate are expected; and (2) no knowledgeof which
physical entity (i.e. human or robot) will play the
role of a given participant is known beforehand.
Mission Template Adaptation. On field, the mis-
sion coordinator selects and adapts templates ac-
cording to the environment and work to be done
by the team. An example of an adaptation is the
Figure 1: Partial view of the WFDM tool. Dark boxes rep-
resent active activities. Transitions, data-flow links, and ex-
ceptions are represented by blue, grey, and pink arrows, re-
spectively. Each row corresponds to a team participant.
addition of a new activity to deal with a specific
exception. In the process, some of the adapted
mission templates are added to the mission tem-
plates library for reuse.
Mission Template Instantiation. In this step the
mission coordinator instantiates the adapted mis-
sion template towards an operational team plan,
by recruiting physical entities to the team.
Team Plan Execution. Finally, the operational team
plan is distributed to each team member and exe-
cuted.
Mission specification, adaptation, instantiation,
and monitoring are performed in the WorkFlow De-
sign and Monitor (WFDM) tool (see Fig. 1). It was
developed by the authors over the Together Workflow
Editor (TWE) community edition
1
tool for workflow
design applied to human organisations.
2.1 Data-Flow Links
Typically, workflows describe sequences of activities,
which can exchange data at transition time. This lim-
its their application in domains where activities must
exchange data in a tightly coupled way, i.e. during
their execution. To cope with this limitation, the con-
cept of cooperative workflows has been proposed in
(Godart et al., 2000). Although in cooperative work-
flows, activities can share data while executing, being
mostly business management oriented, the exchanged
data is performed sporadically and in the form of doc-
uments.
1
TWE homepage: http://www.together.at/
A KNOWLEDGE-BASED COMPONENT FOR HUMAN-ROBOT TEAMWORK
229

The introduction of robots as team members adds
new challenges to the execution of cooperative work-
flows. Robots require the use of structured data, i.e.
with an explicit semantics. In addition, since many
of the interactions have the purpose of allowing one
participant (typically a human) to modulate the be-
haviour of another one (typically a robot), messages
must be exchanged in a frequent basis. An example
of a tightly coupled interaction is when a robotic team
member is being teleoperated by a human team mem-
ber.
Bearing this in mind, the cooperative workflow
formalism is here extended with data-flow links,
which allow activities to exchange structured mes-
sages, i.e. according to the ontology, in an asyn-
chronous and frequent basis.
In addition to task-dependent interactions, sub-
ordination relationships also play a relevant role in
human-robot teamwork. For this purpose, some ac-
tivity parameters are defined at system level. For
example, one team member (typically human) must
be able to terminate another team member’s (typi-
cally robotic) activity. This termination order is sent
through a data-flow link. This feature can be seen in
Fig. 1, in which the robot is teleoperated only while
the human operator considers necessary.
3 MULTI-AGENT SYSTEM FOR
TEAMWORK
This section describes the multi-agent system sup-
porting the creation, adaptation, instantiation, and fi-
nally, execution of team plans. The system is built
over the Java-based multi-agent platform JADE (Bel-
lifemine et al., 1999), which provides two main facil-
ities, namely: a yellow pages service for agent regis-
tration and lookup, plus an inter-agent messaging in-
frastructure.
Fig. 2 illustrates the major components of the
multi-agent system. The coordinator represents hu-
man operators/experts responsible for formalising,
adapting, instantiating, and monitoring a mission.
The robotic and human participants represent robots
and humans, respectively, involved in the mission’s
execution.
The explicit separation between human and
robotic participant is essential at all levels. First,
when defining domain knowledge, it is important to
know which concepts must be followed by a human
readable description. At execution time, humans are
very good in understanding the situation at hand, even
in the presence of incomplete information. With ex-
perience, humans are also very good in understanding
Figure 2: Multi-agent system for teamwork.
when something is not working properly, like suspect-
ing that messages are being lost when information ap-
pears in an intermittent way. Unlike robots, humans
are not fully dependent on system level mechanisms
to handle these situations. Consequently, watchdog
and handshaking mechanisms, among others, are im-
portant in tasks to be performed by robots.
Understanding what activities are to be performed
by humans and robots allows the system, for instance,
to use the network in a parsimonious way. Handshak-
ing mechanisms, which introduce network overhead,
can be relaxed when performed in messages flow-
ing from robots to humans. Considering humans and
robots in such asymmetrical way, allows the system
to exploit each one’s specificities on its behalf.
3.1 Coordinator
By using the WFDM tool, the domain expert for-
malises knowledge, the coordinator adapts, instanti-
ates, and monitors the execution of the mission. The
WFDM tool interacts with the coordinator’s proxy in
the system, i.e. the mission middle agent, in order to
provide the coordinator with a list of available phys-
ical entities able to play the role of each mission’s
participant. The coordinator is responsible for the fi-
nal selection. Afterwards, the part of the plan corre-
sponding to each participant is sent to its Mission Ex-
ecution (ME) proxy agent. Finally the team initiation
is done by the mission middle agent, by informing all
ME proxy agents of the event.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
230
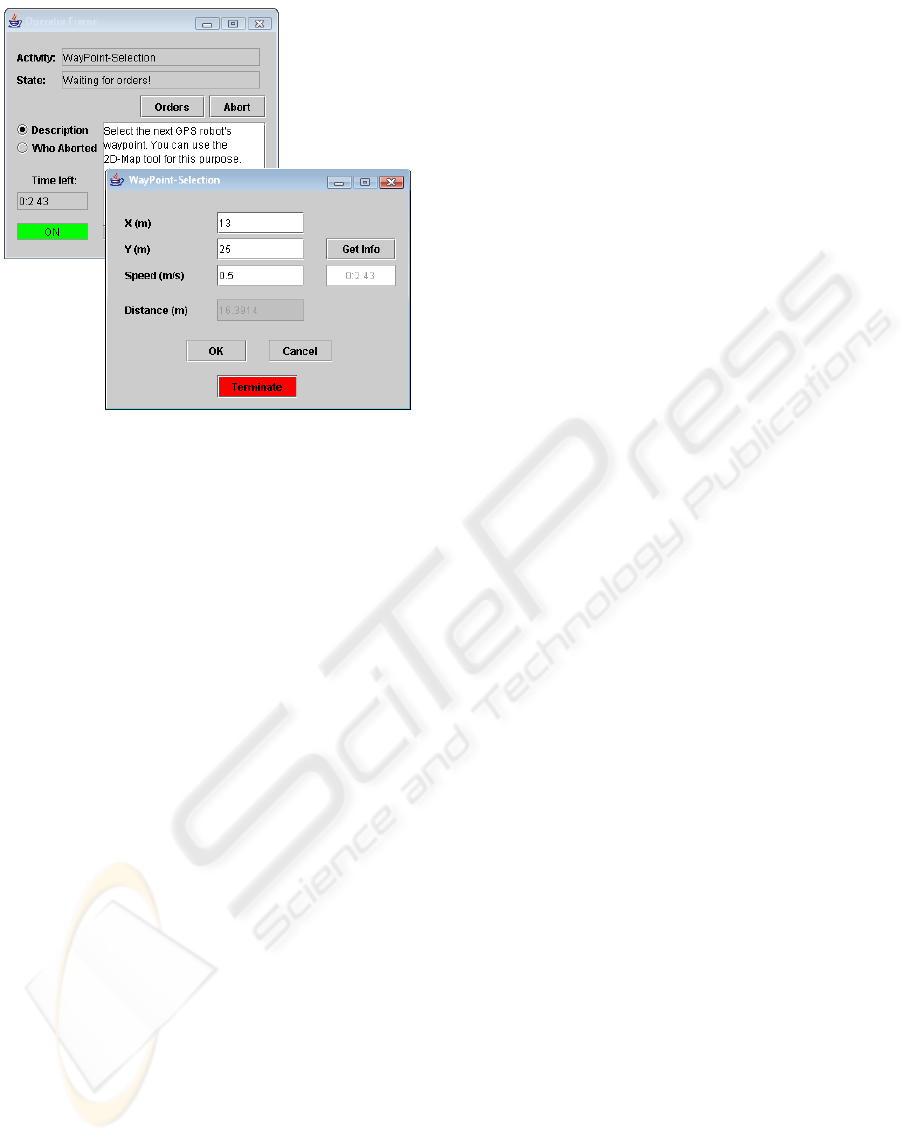
Figure 3: Human participant graphical interface. The frame
in the rear illustrates the main front-end containing the ac-
tivity’s description. The frame in the front is dynamically
adapted according to the current activity.
During mission execution, each ME proxy agent
informs the mission middle agent of its execution state
(e.g. which activity is currently being executed). This
information is then presented through the WFDM tool
to the coordinator, reflecting the status of the mis-
sion. This symbolic information augments the coor-
dinator’s mission awareness.
3.2 Participants
Each ME proxy agent is composed of two main
components: (1) the Multi-Agent System Interaction
Mechanism (MAS-IM), and the (2) physical entity in-
terface. The MAS-IM is the component that enables
the agent to interact with other agents in the multi-
agent community, as well as to exploit its middleware
services (e.g. yellow pages service). In this work, this
module is built over the JADE platform. The mission
middle agent also aggregates a MAS-IM module for
the same purposes. The physical entity interface is the
module abstracting the physical entity, i.e. its control
system in the robot case (e.g. the behavioural hier-
archy in Fig. 2), and a set of graphical interfaces (see
Fig. 3) in the human case.
3.3 Plan Execution
Let us start explaining the plan execution with a mo-
tivating example. At a given moment, the human
ME proxy agent knows that its current activity is
waypoint-selection
. In this situation, its physi-
cal entity interface adapts the graphical interface as
in Fig. 3, so that the human can fill in the next way-
point for the robot. Each time the operator updates
this field, its operator ME proxy agent sends an inter-
agent message to the robot ME proxy agent, currently
executing the activity
goto-waypoint
. This mes-
sage exchange has been specified in the team plan by
means of a data-flow link. Then, through its physi-
cal entity interface, the robot ME proxy agent updates
the robot’s control system according to the incoming
message, consequently modulating the goto WayPoint
(WP) behaviour. The WP behaviour is implemented
by a set of perception-action rules able to drive the
robot towards the given waypoint. In addition, the
human is also provided with a message suggesting the
use of a 2-D visualisation (Santos et al., 2007) so as to
enhance its situation awareness, before selecting the
waypoint. This example highlights the main role of
the human ME proxy agent: to provide awareness.
In detail, the plan execution proceeds as follows.
As mentioned, each ME proxy agent receives from the
mission middle agent the part of the team plan corre-
sponding to the participant it is representing. Then, it
executes its part of the plan according to the following
algorithm:
1. Obtain participant’s
start-activity
.
2. While the current activity is not terminated, up-
date its input parameters with the contents of in-
coming, from other ME proxy agents, data-flow
messages. In addition, ME proxy agents send
data-flow messages to others alike, whose con-
tents are the current activity’s output parameters
values.
The aforementionedprocess of updating the activ-
ity’s input parameters is done by sending a mes-
sage to the participant’s physical entity interface,
which is able to interface directly with the entity’s
execution layer (e.g. robot’s control system). In
turn, the execution layer provides the ME proxy
agent with the current values of the activity’s out-
put parameters, through the physical entity inter-
face.
The activity’s termination event, along with its
code (e.g.
not-ok-aborted
,
not-ok-time-out
,
or
ok
), is provided to the ME proxy agent through
the physical entity interface.
3. Being the current activity, C, terminated, the last
obtained values of its output parameters are sent
to the ME proxy agents of those participants that
have active incoming transitions from C. These
transitions become active if their associated con-
ditions on the termination code of C are met.
These messages are buffered in the receiving ME
A KNOWLEDGE-BASED COMPONENT FOR HUMAN-ROBOT TEAMWORK
231

proxy agents allowing subsequent asynchronous
consumption. For further reference, these mes-
sages will be called
transition
messages.
4. Wait until one of the subsequent participant’s ac-
tivities becomes active. This activation occurs if
all necessary, or one sufficient of its transitions, is
active too. This is assessed by verifying if any of
the received
transition
messages refers to the
necessary and sufficient transitions.
5. The parameters encompassed in received
transition
messages are used to update the
activity’s input parameters. If more than one
message (e.g. sent by activities in different
participants) feeds the same input parameter, only
one is selected according to a pre-specified –
in the plan – priority. The actual update of the
activity’s input parameters is carried out as in step
2, i.e. through the physical entity interface.
6. Return to step 2 until the
end-activity
is
reached.
To allow the coordinator to follow the mission
unfolding, messages stating activities and transitions
activation/deactivation events are sent to the mission
middle agent, which in turn updates the WFDM tool.
4 CASE STUDY
In order to illustrate the proposed architecture, one
case study has been selected: scanning a terrain with
a scent sensor to detect minefields. The case study is
defined as a high-level task involving one robot, and
two humans, viz. one robot operator plus one sensor
operator. The goal is to determine if a given terrain
is a minefield. When the mission starts, the robot is
equipped with a sensor able to determine the proba-
bility of the terrain to be a minefield. After analysing
the terrain, the sensor is returned to the sensor op-
erator, which is located in a safe location away of
the potential minefield. The robot operator, also re-
mote to the operations site, helps the robot whenever
needed. Fig. 1 depicts how the team plan looks like in
the graphical interface of the WFDM tool.
In this case study, the robot first moves towards
the operator handling the scent sensor so as to get the
sensor (
GotoSensorOperator 1
). After reaching the
operator,
GotoSensorOperator 1
terminates activat-
ing
PutSensor
, in which the sensor operator equips
the robot with the sensor. Then, the robot operator
parameterises a zig-zag behaviour (i.e. a set of paral-
lel lanes to be followed in a sequential manner) us-
ing the graphical interface of activity
DefineZigZag
.
Afterwards, the robot moves in the direction of the
defined zig-zag region (
GotoZigZagRegion
), while
being modulated by the robot operator whenever nec-
essary (
AssistGotoZigZagRegion)
. The zig-zag
specification is passed to the robot as a transition in-
put parameter, whereas the
GotoZigZagRegion
mod-
ulating signal is passed through a data-flow link. As
soon as the robot reaches the zig-zag region, the zig-
zag behaviour is activated (
ZigZag
), which is also as-
sisted by the robot operator (
AssistZigZag
). An ex-
ample of assistance is “change to the next lane”. If
the robot departs too much from the lane being fol-
lowed, caused for instance by the presence of a large
obstacle, then
ZigZag
terminates with an exception.
In response, the robot passes to teleoperation mode
(
BeingTeleOperated
) and the current robot opera-
tor’s activity is terminated.
Then, the robot operator is called to teleoper-
ate the robot (
TeleOperate
). In this case, the
TeleOperate
provides
BeingTeleOperated
with
teleoperation commands as data-flow messages. This
corresponds to the mission state illustrated in Fig. 1.
As soon as the operator considers the robot is again
in a convenient position to resume its autonomous
zig-zag behaviour,
TeleOperate
terminates, which
in turn requests
BeingTeleOperated
to terminate as
well. This is an example of a human activity termi-
nating a robot activity by means of data-flow. Be-
ing again in autonomous zig-zag behaviour, the robot
eventually reaches the end point of the zig-zag region
and
ZigZag
terminates. Then, the robot moves to-
wards the sensor operator (
GotoSensorOperator 2
),
leaving the sensor there (
RemoveSensor
), whose data
is logged (
LogData
). All
Goto*
activities are of the
same type
GotoXY
.
4.1 Empirical Results
A set of simulated and field missions with the phys-
ical robot Ares for off-road environments (Santana
et al., 2007; Santana et al., 2008), demonstrated the
feasibility of the system. The information provided
to the operator was enough for a proper awareness at
each moment of the mission. The design of demining
and surveillance missions, as complex as the one
presented as case study, posed no major challenges
to the user. However, for more complex tasks it
was clear the need for workflow nesting capabilities.
In terms of network load, the system showed to be
sustainable, even for teleoperation cycles of 10Hz.
However, wireless communication temporary failures
resulted in the loss of messages, resulting in system’s
performance degradation, and sporadic crashes.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
232

5 CONCLUSIONS AND FUTURE
WORK
To our knowledge, this paper contributes with a pio-
neering step towards exploitation of knowledge based
techniques in human-robot teamwork. The goal was
to enable cooperative execution of stereotyped tasks,
essential in demanding scenarios, where timely deci-
sion making is required. The cooperative workflow
formalism, usually employed for business oriented
human organisations, was selected.
Clear distinctions on the way humans and robots
interact required the workflow formalism to be
adapted. Some adaptations were suggested, with par-
ticular focus on data-flow links. These links en-
able the implementation of tightly coupled coordina-
tion. This ability is usually disregarded in works of
both theoretical teamwork and cooperative workflow
fields, which typically focus on high-level tasks with
sporadic interactions. Although multi-robots litera-
ture is more concerned with tightly coupled coordina-
tion, it lacks a structural approach to cope with the hu-
man factor. This paper presented a multi-agent system
that explicitly considers the human. First, the work-
flow formalism is usually employed by humans and
consequently natural to them. Second, by consider-
ing different message exchanging protocols and sys-
tem level activity parameters, both human and robot
asymmetries are explicitly taken into account. Third,
human readable information is formally attached to
the ontology concepts used by the human participant.
As future work we expect to make use of nested
workflows. In addition, the abstraction of human-
robot sub-teams as work-flow participants will also
be subject of analysis. Dynamic invocation of team
sub-plans will be pursued as a way of applying well
known stereotyped problem solvers (i.e. mission tem-
plates) to the situation at hand. Robustness against
communication channels degradation must be further
studied. Handshaking and message aging policies
must be analysed, separately, for the human-robot and
robot-robot interaction cases. A thorough analysis of
non-expert user friendliness is still missing.
ACKNOWLEDGEMENTS
We thank Paulo Santos and Carlos Cˆandido for
proofreading. The work was partially supported by
FCT/MCTES grant No. SFRH/BD/27305/2006.
REFERENCES
Bellifemine, F., Poggi, A., and Rimassa, G. (1999). JADE
– a FIPA-compliant agent framework. In Proc. of
PAAM’99, pages 97–108, London.
Drury, J., Keyes, B., and Yanco, H. (2007). LASSOing
HRI: Analyzing Situation Awareness in Map-Centric
and Video-Centric Interfaces. In Proc. of the HRI’ 07,
pages 279–286, Arlington, Virginia, USA.
Drury, J., Scholtz, J., and Yanco, H. (2003). Awareness in
human-robot interactions. In Proc. of the IEEE Int.
Conf. on Systems, Man and Cybernetics.
Godart, C., Charoy, F., Perrin, O., and Skaf-Molli, H.
(2000). Cooperative workflows to coordinate asyn-
chronous cooperative applications in a simple way. In
Proc. of the 7th Int. Conf. on Parallel and Distributed
Systems, pages 409–416.
Nourbakhsh, I., Sycara, K., Koes, M., Yong, M., Lewis,
M., and Burion, S. (2005). Human-Robot Teaming
for Search and Rescue. Pervasive Computing, IEEE,
4(1):72–78.
Santana, P., Barata, J., and Correia, L. (2007). Sustainable
robots for humanitarian demining. Int. Journal of Ad-
vanced Robotics Systems (special issue on Robotics
and Sensors for Humanitarian Demining), 4(2):207–
218.
Santana, P., Cˆandido, C., Santos, P., Almeida, L., Correia,
L., and Barata, J. (2008). The ares robot: case study of
an affordable service robot. In Proc. of the European
Robotics Symposium 2008 (EUROS’08), Prague.
Santos, V., Cˆandido, C., Santana, P., Correia, L., and Barata,
J. (2007). Developments on a system for human-robot
teams. In Proceedings of the 7th Conf. on Mobile
Robots and Competitions, Paderne, Portugal.
Scerri, P., Pynadath, D., and Tambe, M. (2002). Towards
adjustable autonomy for the real world. Journal of
Artificial Intelligence Research, 17:171–228.
Schreiber, G., Akkermans, H., Anjewierden, A., deHoog,
R., Shadbolt, N., VandeVelde, W., and Wielinga, B.
(2000). Knowledge Engineering and Management:
The CommonKADS Methodology. MIT Press.
Sierhuis, M., Clancey, W., Alena, R., Berrios, D., Shum, S.,
Dowding, J., Graham, J., Hoof, R., Kaskiris, C., Ru-
pert, S., and Tyree, K. (2005). NASA’s Mobile Agents
Architecture: A Multi-Agent Workflow and Commu-
nication System for Planetary Exploration, i-SAIRAS
2005. M¨unchen, Germany.
Sycara, K. and Sukthankar, G. (2006). Literature review of
teamwork models. Technical Report CMU-RI-TR-06-
50, Robotics Institute, Carnegie Mellon University.
Tambe, M. (1997). Towards flexible teamwork. Journal of
Artificial Intelligence, 7:83–124.
A KNOWLEDGE-BASED COMPONENT FOR HUMAN-ROBOT TEAMWORK
233
