
PROSPECTIVE ROBOTIC TACTILE SENSORS
Elastomer-Carbon Nanostructure Composites as Prospective Materials for Flexible
Robotic Tactile Sensors
Maris Knite, Gatis Podins, Sanita Zike, Juris Zavickis
Institute of Technical Physics, Riga Technical University, Azenes str. 14/24, Riga, Latvia
Velta Tupureina
Institute of Polymer Materials, Riga Technical University, Azenes str. 14/24, Riga, Latvia
Keywords: Flexible, pressure sensor, polyisoprene, carbon black, CNT.
Abstract: Our recent achievements in the design, processing and studies of physical properties of elastomer – nano-
structured carbon composites as prospective compressive strain sensor materials for robotic tactile elements
are presented. Composites made of polyisoprene matrix and high-structured carbon black or multi-wall
carbon nano-tube filler have been designed and manufactured to develop completely flexible conductive
polymer nano-composites for tactile sensing elements. Electrical resistance of the composites as a function
of mechanical strain and pressure is studied.
1 INTRODUCTION
Sensors of strain and pressure are important in many
fields of science and engineering. One of the main
confines of the existing conventional sensors is
being discrete-point, fixed-directional and inflexible.
For design of pressure sensors the most often used
material is piezoelectric ceramics made separated
from the material or structure being monitored.
There is a demand for new flexible large-area
sensors that can be embedded, for example, into the
flexible skin material of robotic fingers and used for
sensing multiple locations. Due to increasing
application in the machine-building, especially in
aerospace industry, polymer – carbon black
composites are most actively studied materials
(Manson, 1976; Sichel, 1982). Such composites are
mostly used as the so-called inactive materials in
electrical heating elements, resistors, and antistatic
charge materials or shields of electromagnetic
radiation (Wessling, 1986). Conductive rubber
composites produced using carbon black, are still
attracting attention as active materials due to the
effectiveness in applications such as strain and
pressure sensors, temperature sensors and selective
gas sensors (Aneli, 1999; Zhang, 2000; Das, 2002;
Job, 2003; Knite, 2002; Knite, 2004; Dohta, 2000;
Dharap, 2004). New interesting properties are
expected in case the composite contains dispersed
nano-size conducting particles. If the size of carbon
particle and specific surface area of carbon black are
between 60 to 200 nm and 16-24 m
2
/g, respectively
(low-structure carbon nano-particles (LSNP)), the
electrical resistance of natural rubber composites
slowly decreases with applied pressure (Job, 2003).
The effect is explained by the increasing number of
conductive channels due to the increase of external
pressure.
Resistance of polyisoprene – carbon nano-
composites grows very rapidly and reversibly for
both – tensile and compressive strain when high-
structured carbon nano-particles (HSNP) (specific
surface area 950 m
2
/g, mean diameter 25 nm) are
used as the filler (Knite, 2002; Knite, 2004).
In this paper our recent success in the design,
processing and studies of physical properties of
polymer – nano-structured carbon (PNC) composites
is presented with regard to prospective flexible
compressive strain and pressure-sensing materials
for soft robotic tactile elements.
Superior mechanical and electrical properties of
carbon nano-tubes offer attractive possibilities for
new sensors. So far most studies have been related
234
Knite M., Podins G., Zike S., Zavickis J. and Tupureina V. (2008).
PROSPECTIVE ROBOTIC TACTILE SENSORS - Elastomer-Carbon Nanostructure Composites as Prospective Materials for Flexible Robotic Tactile
Sensors.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - RA, pages 234-238
DOI: 10.5220/0001497802340238
Copyright
c
SciTePress
to mechanical deformation and change of nano-scale
electrical properties. An attempt to use the strain
sensing capability of single-wall carbon nano-tubes
(SWCNT) on the nano-scale level in a macro-scale
strain sensor was made by Dharap et al.. We present
in this paper an attempt to use the multi-wall carbon
nano-tubes (MWCNT) to devise a flexible
composite for macro-scale pressure indicators
(relative pressure difference sensors) or robotic
tactile elements.
2 DESIGN PRINCIPLES OF THE
STRUCTURE OF MATERIALS
On the basis of the results of other authors (Aneli,
1999; Zhang, 2000; Das, 2002; Job, 2003) we have
developed the following principles designing the
structure of materials to obtain most sensitive
multifunctional elastomer–carbon nano-composites:
1) Polyisoprene (natural rubber) of the best
elastic properties has to be chosen as the matrix
material;
2) High-structured carbon nano-particles (HSNP)
providing a fine branching structure and a large
surface area (better adhesion to polymer chains
compared to LSNP) should be taken as the filler.
Because of a higher mobility of HSNP compared
with LSNP the electro-conductive network in the
elastomer matrix in this case is easily destroyed by
very small tensile or compressive strain. We suppose
this feature makes the elastomer–HSNP composite
an option for more sensitive tactile elements in
robots.
3) The highest sensitivity is expected in the
percolation region of a relaxed polyisoprene
composite. The smallest mechanical strain or
swelling of the composite matrix remarkably and
reversibly increases resistance of such a composite.
From the thermodynamic point of view the sensing
of strain is based on the shift of percolation
threshold, for example, under tensile strain as shown
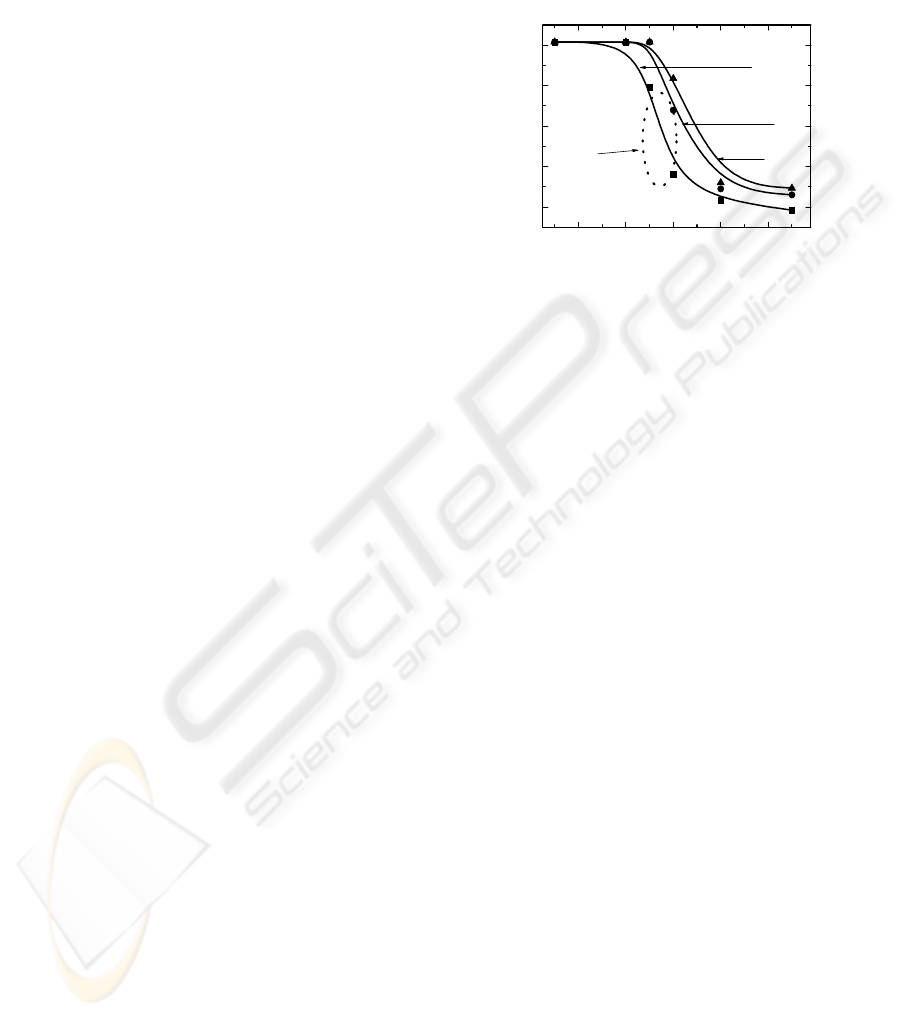
in Figure 1 (Knite, 2002; Knite, 2004).
As seen from Fig. 1, the shift of the percolation
threshold at less than 30% strain changes electric
resistance of the composite with 10 mass parts of
HSNP filler more than 10
4
times. The highest strain
sensitivity is expected in the percolation region (9-
10 mass parts of the HSNP filler) of a relaxed PNC
composite. Thus, the maximum sensitivity of PNC
composite materials to thermodynamic forces is
supposed to occur near the percolation threshold of
electric conductivity.
To obtain completely flexible tactile sensing
elements of large area (relative to rigid piezoelectric
sensors) a layer of the active PNC composite is fixed
between two conductive rubber electrodes by means
of a special conductive rubber glue.
6 8 10 12 14
4
6
8
10
12
The maximum
sensitivity
region
lgR, Ω
Carbon black, mass parts
streched 30%
streched 40%
relaxed
Figure 1: Shift of the percolation threshold in polyisoprene
– high-structured carbon nano-particle composite under
tensile strain (Knite, 2002; Knite, 2004).
3 PREPARATION OF SAMPLES
AND ORGANISATION OF THE
EXPERIMENT
The polyisoprene – nano-structured carbon black
(PNCB) composite was made by rolling high-
structured PRINTEX XE2 (DEGUSSA AG) nano-
size carbon black and necessary additional
ingredients – sulphur and zinc oxide – into a Thick
Pale Crepe No9 Extra polyisoprene (MARDEC,
Inc.) matrix and vulcanizing under 30 atm pressure
at 150 ˚C for 15 min. The mean particle size of
PRINTEX XE2 is 30 nm, DBP absorption – 380
ml/100 g, and the BET surface area – 950 m
2
/g.
The polyisprene – carbon nanotube (PCNT)
composites containing dispersed multi-wall carbon
nanotubes (MWCNT) were prepared as follows. The
size of MWCNT: OD = 60-100 nm, ID = 5-10 nm,
length = 0.5-500 μm, BET surface area: 40-
300 m
2
/g. To increase the nano-particles mobility
and to obtain a better dispersion of the nano-
particles within the matrix the matrix was treated
with chloroform. The prepared matrix was allowed
to swell for ~ 24 h. The MWCNT granules were
carefully grinded with a small amount of solvent in a
china pestle before adding to the polyisoprene
matrix. Solution of the polyisoprene matrix and the
concentrated product of nano-size carbon black was
mixed with small glass beads in a blender at room
temperature for 15 min. The product was poured into
a little aluminum foil box and let to stand for ~ 24 h,
PROSPECTIVE ROBOTIC TACTILE SENSORS - Elastomer-Carbon Nanostructure Composites as Prospective Materials
for Flexible Robotic Tactile Sensors
235

dried at 40 ºC and vulcanized under high pressure at
160ºC for 20 min.
Discs of 16 mm in diameter and 6 mm thick
were cut from the vulcanized PNCB composite
sheet. Conductive polyisoprene – HSCB (30 mass
parts) composite electrodes were prepared and
fastened to the disc with special conductive adhesive
(BISON Kit + 10 mass parts of HSCB) as shown in
Figure 2.
Figure 2: Picture of completely flexible strain sensing
element made of PNCB composite with conductive rubber
electrodes.
Aluminum electrodes were sputtered on opposite
sides of the sensing element (20 × 11.5 × 2.4 mm)
made of the PCNT composite as shown in Figure 3.
Figure 3: picture of a strain sensing element made of
PCNT composite with sputtered Al electrodes.
Electrical resistance of samples was measured vs
mechanical compressive strain and pressure on a
modified Zwick/Roell Z2.5 universal testing
machine, HQ stabilized power supply, and a
KEITHLEY Model 6487 Picoammeter/Voltage
Source all synchronized with an HBM Spider 8 data
acquisition logger. Resistance R of the composites
was examined with regard to compressive force F
and the absolute mechanical deformation Δl in the
direction of the force. Uniaxial pressure and relative
strain were calculated respectively.
4 EXPERIMENTAL RESULTS
AND DISCUSSION
The percolation thresholds of PNCB and PCNT
composites were estimated in the first place. Of all
the composites examined, the best results were
obtained with samples containing 14.5 mass parts of
MWCNT and 10 mass parts HSCB, apparently
belonging to the region slightly above the
percolation threshold. Dependence of electrical
resistance on uniaxial pressure first was examined
on a PNCB composite disc without the flexible
electrodes. Two brass sheets 0.3 mm thick and 16
mm in diameter were inserted between the disc and
electrodes of the testing machine.
036912151821242730
0
200
400
600
800
1000
1200
ΔR/R
o
Pressure, MPa
First cycle
Figure 4: Electrical resistance (in relative units) of an
element (without flexible electrodes) of PNCB composite
containing 10 mass parts of HSCB as function of pressure.
T = 293 K.
0369121518212427
0
200
400
600
800
1000
1200
ΔR/R
o
ε, %
First cycle
Figure 5: Electrical resistance (in relative units) of an
element (without flexible electrodes) of PNCB composite
containing 10 mass parts of HSCB as function of
compressive strain ε. T = 293 K.
The piezoresistance effect in PNCB composite is
reversible and positive ((ΔR)/R
0
>0) (Figure 4 and
Figure 5).
As a next the measurements of the
piezoresistance effect observed in an element of
PNCB composite with flexible electrodes attached is
illustrated in Figure 6 and Figure 7 showing that the
piezoresistance effect decreases approximately 10
times but remains positive.
The positive effect can be explained by
transverse slippage of nano-particles caused by
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
236

external pressure leading to destruction of the
conductive channels.
0246810121416182022
0
2
4
6
8
10
12
14
16
18
ΔR/R
o
Pressure, MPa
First cycle
Figure 6: Electrical resistance (in relative units) of an
element (with flexible electrodes) of PNCB composite
containing 10 mass parts of HSCB as function of pressure.
T = 293 K.
0 3 6 9 1215182124
0
2
4
6
8
10
12
14
16
18
ΔR/R
o
ε, %
First cycle
Figure 7: Electrical resistance (in relative units) of an
element (with flexible electrodes) of PNCB composite
containing 10 mass parts of HSCB as function of
compressive strain ε. T = 293 K.
As seen from Figures 8, 9 and 10, the electrical
resistance of the sensing element of PCNT
composite decreases monotonously with uniaxial
pressure and compressive strain. In this case the
piezoresistance effect is considered as negative
((ΔR)/R
0
<0). Compared with a sensing element of
the PNCB composite with flexible electrodes the
piezoresistance effect – the absolute value of
(ΔR)/R
0
of a sensing element of the PCNT
composite (Figure 7 and Figure 9) is more than 10
times smaller. Thus, the PNCB composite is more
sensitive to mechanical action than the PCNT
composite. The latter exhibits a more monotonous
dependence of electrical resistance on compressive
strain.
Moreover, only insignificant changes of
disposition of the curve were observed during 20
cycles (Figure 10). We explain the negative
piezoresistance effect by formation of new
conductive channels of MWCNT under external
pressure.
0,00 0,03 0,06 0,09 0,12 0,15 0,18 0,21
-0,7
-0,6
-0,5
-0,4
-0,3
-0,2
-0,1
0,0
ΔR/R
o
pressure, MPa
Max compressive strain 5 %
Figure 8: Electrical resistance (in relative units) of an
element (with Al electrodes) of PCNT composite
containing 14.5 mass parts of MWCNT as function of
pressure. T = 293 K.
0,0 0,5 1,0 1,5 2,0 2,5 3,0 3,5 4,0 4,5 5,0
-0,7
-0,6
-0,5
-0,4
-0,3
-0,2
-0,1
0,0
0,1
0,2
ΔR/R
0
ε, %
First cycle
Figure 9: Electrical resistance (in relative units) of an
element (with Al electrodes) of PCNT composite
containing 14.5 mass parts of MWCNT as function of
compressive strain ε. T = 293 K.
0,0 0,5 1,0 1,5 2,0 2,5 3,0 3,5 4,0 4,5 5,0
-0,7
-0,6
-0,5
-0,4
-0,3
-0,2
-0,1
0,0
0,1
0,2
ΔR/R
0
ε, %
1 cycle
1st cycle
20th cycle
20th cycle
Figure 10: Electrical resistance (in relative units) of an
element (with Al electrodes) of PCNT composite
containing 14.5 mass parts of MWCNT as function of
compressive strain ε. 20 loading cycles. T=293 K.
PROSPECTIVE ROBOTIC TACTILE SENSORS - Elastomer-Carbon Nanostructure Composites as Prospective Materials
for Flexible Robotic Tactile Sensors
237

Consequently, the PNCB composite could be a
prospective material for pressure-sensitive indication
while the PCNT composite can be considered as a
prospective material for pressure sensors.
5 CONCLUSIONS
Completely flexible sensing elements of
polyisoprene – high-structured carbon black and
polyisoprene – multi-wall carbon nanotube
composites have been designed, prepared and
examined. The first composite having a permanent
drift of its mean electrical parameters is found to be
a prospective material for indication of pressure
change. The other composite has shown good
pressure sensor properties being capable to
withstand many small but completely stable and
reversible piezoresistive cycles.
REFERENCES
Manson, J.A., Sperling, L.H., 1976. Polymer blends and
their composites. New York: Plenum Press.
Sichel, E.K., editor, 1982. Carbon black polymer
composites. New York: Decker.
Wessling, B., 1986. Elektrish leitfahige Kunststoffe.
Kunststoffe, 76. 930
Aneli, J.N., Zaikov, G.E., Khananashvili, I.M., 1999. Appl
J., Polymer Sci., 74: 601.
Zhang, X.W., Pan, Y., Zheng, Q., Yi X. S., 2000. Journal
of Polymer Science B., 38: 2739.
Das, N.C., Chaki, T.K., Khastgir, D., 2002. Polymer
International, 51: 156.
Job, A.E., Oliveira, F.A., Alves, N., Giacometti, J.A.,
Mattoso, L.H.C., 2003. Conductive composites of
natural ruber and carbon black for pressure sensors.
Syntetic metals, 135-136: 99-100
Knite, M., Teteris, V., Polyakov, B., Erts, D., 2002.
Electric and elastic properties of conductive
polymeric nanocomposites on macro- and nanoscales.
Materials Science & Engineering C, 19: 5-19.
Knite, M., Teteris, V., Kiploka, A., Klemenoks, I., 2004.
Reversible tenso-resistance and piezo-rezistance
effects in conductive polymer-carbon nanocomposites.
Advanced Engineering Materials, 6: 742-746.
Dohta, S., Ban, Y., Matsushita, H., 2000. Application of a
flexible strain sensor to a pneumatic rubber hand.
Proc. of 6th Triennal International Symposium on
Fluid Control, Measurement and Visualization,
Canada, Sherbrooke, 87.
Dharap, P., Li, Z., Nagarjaiah, S., Barrera, E.V., 2004.
Nanotube film based on single-wall carbon nanotubes
for strain sensing, Nanotechnology, 15: 379-382.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
238
