
MPC FOR SYSTEMS WITH VARIABLE TIME-DELAY
Robust Positive Invariant Set Approximations
Sorin Olaru, Hichem Benlaoukli
SUPELEC, Automatic Control Department, Gif-sur-Yvette, 91192, France
Silviu-Iulian Niculescu
LSS - SUPELEC, 3 rue Joliot Curie, F-91192 Gif-sur-Yvette, France
Keywords:
Predictive control, Time-delay, Invariant sets.
Abstract:
This paper deals with the control design for systems subject to constraints and affected by variable time-delay.
The starting point is the construction of a predictive control law which guarantees the existence of a nonempty
robust positive invariant (RPI) set with respect to the closed loop dynamics. In a second stage, an iterative
algorithm is proposed in order to obtain an approximation of the maximal robust positive invariant set. The
problem can be treated in the framework of piecewise affine systems due to the explicit formulations of the
control law obtained via multiparametric programming.
1 INTRODUCTION
The delays (constant or time-varying, distributed or
not) describe coupling between the dynamics, propa-
gation and transport phenomena, heredity and com-
petition in population dynamics. Various motivat-
ing examples and related discussions can be found in
(Niculescu, 2001), (Michiels and Niculescu, 2007).
There is an consensus in defining delay as a criti-
cal parameter in understanding dynamics behavior
and/or improving (overall) system’s performances.
Independently of the mathematical problems related
to the appropriate representation of such dynamics,
the delay systems are known to rise challenging con-
trol problems due to the instabilities introduced by the
deferred input actions. One of the natural ways to
counteracting the effects of dead-time is to predict the
system evolution but particular care has to be shown
to the sensitivity of predictions for unstable models.
MPC - ”Model Predictive Control” is a popular
control technique based on the resolution of a finite-
time optimal control problem over a receding hori-
zon. Several strategies were proposed in order to re-
inforce the MPC stability (Maciejowski, 2002; Good-
win et al., 2004) having as main ingredients the termi-
nal cost functions and the positive invariant terminal
constraints (Mayne et al., 2000). Unfortunately, con-
sidering similar uncertainty interpretation in the con-
text of time-varying delays lead to complex min-max
optimization problems, difficult to handle on-line.
The present paper proposes an alternative issue for
handling such a control problem. More precisely, we
propose to use a simple MPC design constructed upon
the nominal prediction. The resulting piecewise affine
control law will transform the closed-loop dynamic in
a piecewise affine system, the variable delay inducing
in fact a model uncertainty. The existence of a non-
empty positive invariant set can be guaranteed under
mild conditions. Two problems related to the robust-
ness of the designed control law will be dealt in detail:
• tuning the nominal MPC using inverse optimality;
• characterisation of the maximal robust positive in-
variant (MRPI) set.
It should be noted that the MRPI set may not be
finitely determined and the second point will itera-
tively construct a dual expansive/contractive proce-
dure for providing an inner approximation.
The paper is organized as follows: section 2 for-
mulates the control problem and defines the models
to be further used in the MPC design; section 3 deals
with the construction of the explicit piecewise affine
control law and section 4 details the approximation
of the maximal robustly positive invariant set for the
closed-loop system. Finally section 5 presents an ex-
ample whereas section 6 draws the conclusions.
177
Olaru S., Benlaoukli H. and Niculescu S. (2008).
MPC FOR SYSTEMS WITH VARIABLE TIME-DELAY - Robust Positive Invariant Set Approximations.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - SPSMC, pages 177-182
DOI: 10.5220/0001501001770182
Copyright
c
SciTePress

2 PROBLEM FORMULATION
Consider a linear continuous time system:
˙x = A
c
x(t) + B
c
u(t − τ) (1)
affected by a variable time delay τ ∈ [0,τ
max
].
Note the discrete time instants x
k
= x(t
k
) = x(kT
e
)
where T
e
is the sampling time. Consider:
d = ⌈
¯
τ/T
e
⌉
ε = dT
e
−
¯
τ
(2)
where
¯
τ is the ”probable” value of the delay. The
nominal discrete time LTI model is:
x
k+1
= Ax
k
+ Bu
k−d
−
¯
∆(u
k−d
− u
k−d+1
) (3)
The matrices A,B,
¯
∆ are given by:
A = e
A
c
T
e
(4)
B =
Z
T
e
0
e
A
c
(T
e
−θ)
B
c
dθ (5)
¯
∆ =
Z
0
−ε
e
−A
c
θ
B
c
dθ (6)
obtained by assuming that the control action u is
maintained constant u(t) = u
k
,∀t ∈ [t
k
,t
k+1
).
Despite this nominal model 3, in the general case,
the variable time-delay implies a variable limit for the
integration for ε. By considering ∆ as a matrix af-
fected by polytopic uncertainty (corresponding to the
variation 0 ≤ ε ≤ T
e
) one can obtain the embedding:
x
k+1
= Ax
k
+ Bu
k−v
− ∆(u
k−v
− u
k−v+1
)
∆ ∈ Co{∆
0
,∆
1
,...,∆
n
}
v ∈ {0, 1,2,...,h}
(7)
where the maximum value of discrete delay is:
h =
τ
max
T
e
(8)
a set of n+ 1 vertices ∆
i
are obtained using the Jordan
form of A
c
(Olaru and Niculescu, 2008).
Using an extended state space representation
based on the equation (3), one can obtain the nomi-
nal prediction model:
ξ
k+1
=
¯
Fξ
k
+
¯
Gu
k
(9)
.
For the same state vector ξ
k
, by using A,B and the
polytopic embedding for ∆ with the extreme realiza-
tions ∆
i
,i = {0,.. . , n} in the extended state space, the
polytopic model can be described:
ξ
k+1
= Fξ
k
+ Gu
k
(F,G) ∈ Co{(F
1
,G
1
),...,(F
s
,G
s
)}
(10)
with s = nh+ 1.
The system evolution has to satisfy physical limi-
tations leading to a set of linear inequalities:
Cξ
k
≤ W (11)
The control objective is the regulation of the state ξ
k
to origin while satisfying the constraints using a re-
ceding horizon optimal control approach.
3 EXPLICIT CONTROL DESIGN:
ROBUSTNESS ISSUE
3.1 Predictive Control
A standard MPC strategy, for the delay system con-
sidered here, will construct at each sampling instant k
the optimal control sequence:
k
∗
u
= {u
k|k
,...,u
k+N−d−1|k
} (12)
with respect to a performance index which evalu-
ates the system dynamics over a finite horizon k +
1,...,k+N. As a basic remark, the prediction horizon
has to be larger than the delay N ≥ d in order to have
an effective measure of its effect at the system output.
Knowing that the prediction is constructed upon the
nominal model but the real system may be affected
by delays up to h samples, it will be considered that
N ≥ h in order to cope with all the possible variations.
The first component of k
∗
u
is effectively applied as
control action to the system:
u
k
= k
∗
u
(1) = u
k|k
(13)
while the tail is discarded. Using the new measure-
ments the optimisation procedure is restarted, thus ob-
taining a closed-loop control scheme.
The most popular performance index has a
quadratic form and commensurate the state (track-
ing error) trajectory and the associated control effort.
If the admissible trajectories are described by con-
straints as in (11), the MPC implementation passes
by the resolution of the optimisation problem of the
form:
k
∗
u
= argmin
{u
k|k
,...,u
k+N−d−1|k
}
{ ξ
k+N|k
T
¯
Pξ
k+N|k
+
N
∑
j=1
ξ
k+ j|k
T
¯
Qξ
k+ j|k
+
N−d−1
∑
j=0
u
T
k+ j|k
¯
Ru
k+ j|k
)
(14)
subject to:
ξ
k+ j+1|k
=
¯
Fξ
k+ j|k
+
¯
Gu
k+ j|k
Cξ
k+ j|k
≤ W; j = 1, . . . ,N − 1
u
k+i|k
= 0, i = N − d,...,N − 1
ξ
k+N
∈ X
N
;
The construction of the predictive control law will
be influenced by the choice of the prediction hori-
zon N, the weighting factors on the state trajectory
¯
Q =
¯
Q
T
≻ 0 and the control effort,
¯
R =
¯
R
T
≻ 0. For
the penalty on the terminal state the matrix
¯
P is usu-
ally constructed such that the prediction horizon to be
extended to infinity by the introduction of the term
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
178

ξ
k+N|k
T
¯
Pξ
k+N|k
in (14). However ξ
k+N|k
has to sat-
isfy some mild conditions materialized by the termi-
nal constraint which force this prediction to reach the
predefined invariant set X
N
. The usual choice in this
sense ((Gilbert and Tan, 1991)) is the maximal output
admissible set X
N
= O
∞
constructed for the system (9)
with the optimal control satisfying the discrete alge-
braic Riccati equation:
¯
P =
¯
Q+
¯
F
T
¯
P
¯
F −
¯
K
T
¯
R+
¯
G
T
¯
PG
¯
K
¯
K = −
¯
R+
¯
G
T
¯
PG
−1
¯
G
T
F
(15)
This is the classical design for the MPC law. In
the subsection 3.3, the choice of the performance in-
dex will be discussed (in particular the matrices
¯
Q,
¯
R
and indirectly
¯
P) such that the resulting control law to
present a certain degree of robustness with respect to
the variable delay.
3.2 Multiparametric Programming
After expressing the predictions as functions of the
current state and the future control action, the opti-
misation problem in (14) can be reformulated as a
multiparametric quadratic problem ((Bemporad et al.,
2002),(Goodwin et al., 2004),(Dua et al., 2007),
(Olaru and Dumur, 2005))
k
∗
u
(ξ
k
) = argmin
k
u
0.5k
T
u
Hk
u
+ k
T
u
Gξ
k
subject to :
A
in
k
u
≤ b
in
+ B
in
ξ
k
(16)
where the vector ξ
k
plays the role of parameter.
Further, explicit solutions for the MPC law can be
obtained by retaining the first component of k
∗
u
(ξ
k
),
thus expressing the predictive control in terms of a
piecewise affine feedback law:
u
k
= K
MPC
i
ξ+ κ
MPC
i
, with i s.t. x ∈ D
i
, (17)
for D
i
, polyhedral regions in ℜ
n+hm
.
Remark 1. The prediction model is linear, the origin
is a feasible point (in the most cases placed on the
interior of the feasible domain) and thus represents
an equilibrium point for the system (9). The problems
(14), and further (16), are feasible and more then that,
the associated optimum will be unconstrained.
The consequence is that the affine control law cor-
responding to the region D
i
0
containing the origin
(0 ∈ D
i
0
) is in fact a linear feedback (κ
MPC
i
0
= 0) and it
corresponds to the unconstrained optimal control law
(K
MPC
i
0
= K
LG
if
¯
P is build upon (15)). If the con-
straints are symmetric, the region containing the ori-
gin will be the central region of the partition (the sym-
metry is inherited in the polyhedral decomposition of
the state space).
3.3 Tuning MPC for Robustness
Consider an infinite-horizon min-max control prob-
lem for the polytopic system (10):
min
K
max
F∈Ω
ξ
∞
∑
i=0
ξ
T
k+i
Qξ
k+i
+ u
T
k+i
Ru
k+i
(18)
u
k
= Kξ
k
(19)
where Q > 0, R > 0 are suitable weighting matrices
fixed a priori and K, the feedback gain playing in fact
the role of the optimization argument.
Consider a quadratic function of the state
V(ξ) = ξ
T
Pξ, P > 0 (20)
which represents an upper bound for J
∞
if the follow-
ing inequality is satisfied ∀F ∈ Ω
ξ
:
V(ξ
k+i+1
) −V(ξ
k+i
) ≤ −[ξ
T
k+i
Qξ
k+i
+ u
T
k+i
Ru
k+i
]
(21)
Rewriting this equation using (19) the following in-
equality is obtained:
ξ
T
k+i
[(F + GK)
T
P(F + GK)
−P+ K
T
RK + Q]ξ
k+i
≤ 0
(22)
or equivalently:
(F + GK)
T
P(F + GK)− P+ K
T
RK + Q ≤ 0 (23)
Using the ideas in (Boyd et al., 1994), by noting
P = GS
−1
and Y = KS, for S ≥ I, the following LMI
can be constructed:
S SF
T
+Y
T
G
T
SQ
1/2
Y
T
R
1/2
FS+ GY S 0 0
Q
1/2
S 0 GI 0
R
1/2
Y 0 0 GI
≻ 0,
(24)
Using now the fact that F ∈ Ω
ξ
, a stabilizing con-
trol law is given by K = YS
−1
where Y, S and the
scalar G are the solutions of the LMI problem (simi-
lar with the construction in (Kothare et al., 1996)):
min
G,S,Y
G
S SF
i
T
+Y
T
G
T
i
SQ
1/2
Y
T
R
1/2
F
i
S+ G
i
Y S 0 0
Q
1/2
S 0 GI 0
R
1/2
Y 0 0 GI
≻ 0,
for all i = 0, . . .,s
S ≥ I
(25)
Remark 2. This LMI based procedure is used in
(Kothare et al., 1996) to design a robust MPC law.
The LMI in (25) is not depending on the measured
state and thus the resulting control law is represented
by a fixed feedback control gain.
MPC FOR SYSTEMS WITH VARIABLE TIME-DELAY - Robust Positive Invariant Set Approximations
179

The resulting law u
k
= Kx
k
represents a robust
stabilizing control in the unconstrained case. In the
sequel, the idea is to use this information when tun-
ing the nominal MPC parameters in (14), namely Q,R
and P. We start with the remark that the MPC law is
a piecewise affine function of the state and the cen-
tral region (or the region containing the origin, if the
constraints are not symmetric) is characterized by the
unconstrained optimum for the chosen performance
index in (14). Constructing this performance index
such that the optimal solution corresponds to the LQ
solution (K = YS
−1
↔ K
LQ
) can be seen as an inverse
optimality problem (Kalman, 1964).
Roughly speaking the tuning procedure is the fol-
lowing: given the matrices
¯
F,
¯
G and Y, S from (25),
the matrices
¯
Q ≥ 0 and
¯
R > 0 (and indirectly
¯
P ≥ 0)
will be constructed such that the optimal solution to
the unconstrained problem (14) to be:
k
∗
u
=
YS
−1
YS
−1
(
¯
F +
¯
GYS
−1
)
.
.
.
YS
−1
(
¯
F +
¯
GYS
−1
)
N−1
ξ
k
(26)
The (not unique) pair (
¯
Q,
¯
R) has to satisfy:
¯
Q =
¯
P−
¯
F
T
¯
P
¯
F +
YS
−1
T
(
¯
R+
¯
G
T
¯
P
¯
G)YS
−1
(27)
¯
RYS
−1
+
¯
G
T
¯
P
¯
GYS
−1
+
¯
G
T
¯
P
¯
F = 0 (28)
This problem can be solved in the general case by
employing an LMI formulation (Larin, 2003):
minα
¯
P−
¯
F
T
¯
P
¯
F +
YS
−1
T
(
¯
R+
¯
G
T
¯
P
¯
G)YS
−1
≻ 0
Z
¯
RYS
−1
+ B
T
¯
PBYS
−1
+ B
T
¯
PA
∗ I
≻ 0
Z ≺ αI,
¯
P ≻ 0
(29)
Theorem 1. The nominal MPC control law, designed
upon a performance index obtained by inverse opti-
mality with respect to an unconstrained robust linear
feedback, is robustly stabilizing the system (10) de-
spite of constraints on a nondegenerateneighborhood
of the origin V.
Proof: The proof is constructive and follows the
arguments described in this section. Using the LMI
formulation (25), a robustly stabilizing control law is
obtained for the unconstrained system (10) affected
by uncertainty. The corresponding gain
¯
K = YS
−1
will be used together with the nominal model for the
resolution of the LMI problem (29) which provides by
inverse optimality the matrix
¯
R. The matrix
¯
Q is ob-
tained with a simple evaluation of (27) and the struc-
ture of the performance index in (14) is completed.
The prediction horizon of the same performance in-
dex can be chosen according with the desired perfor-
mances and complexity of the explicit solution. Inde-
pendently of this choice, if the matrix
¯
P satisfies (15),
then the nominal MPC leads to a piecewise affine con-
trol law and for the region D
i
0
with 0 ∈ Int(D
i
0
) the
explicit control law will be
u
k
= K
MPC
i
0
ξ
k
+ κ
MPC
i
0
= YS
−1
ξ
k
(30)
This region is polyhedral and the robust stabilizing
properties are verified for an invariant subset with re-
spect to the closed loop dynamics (10). If we consider
the general form of the invariant set given by the level
set:
E(σ) =
ξ|ξ
T
¯
Pξ ≤ σ
(31)
then one can find σ > 0 satisfying V = E(σ) ⊂ D
i
0
.
4 RPI SET
The synthesis problem being solved, we dispose of a
control law supposed to stabilize a time-varying de-
lay system. The question is: which is the maximal
invariant set for the closed loop system? An approx-
imation can be obtained by constructing the maximal
robust positive invariant set (MRPI) for a piecewise
affine system (PWA) affected by uncertainty.
A PWA system is obtained from the embedding of
the time-varying system in a linear model affected by
polytopic uncertainty in closed loop with the piece-
wise affine control law:
ξ
k+1
= f
PWA
(ξ
k
) = (F + GK
MPC
i
)ξ
k
+ κ
MPC
i
for ξ
k
∈ D
i
(F,G) ∈ Co{(F
1
,G
1
),...,(F
s
,G
s
)}
(32)
where D
i
are the polytopic partition D = ∪
i
D
i
.
The dynamics related to an extreme realization of
the PWA polytopic uncertainty will be described by:
ξ
k+1
= f
j
PWA
i
(ξ
k
) = (F
j
+ G
j
K
MPC
i
)ξ
k
+ κ
MPC
i
for ξ
k
∈ D
i
, j ∈ {0,1, . . . , s}
(33)
The description of the MRPI set for such a PWA
system is not immediate, even for simple cases the fi-
nite determiness can not be guaranteed. Nevertheless,
the fact that the partition of the state space is given
by polyhedral regions will be used in the following
section to build appropriate approximations.
In order to describe these geometrical construc-
tions, the image and preimage operators over the sets
Ψ ∈ ℜ
n+hm
will be defined as:
Im
f
PWA
(Ψ) =
S
j
ζ ∈ ℜ
n+hm
|∃ξ ∈ Ψ, s.t.
ζ = (F
j
+ G
j
K
MPC
i
)ξ+ κ
MPC
i
for ξ ∈ D
i
∩ Ψ}
(34)
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
180

PreIm
f
PWA
(Ψ) =
T
j
{ξ ∈ D|∃ζ ∈ Ψ, s.t.
ζ = (F
j
+ G
j
K
MPC
i
)ξ+ κ
MPC
i
for ξ ∈ D
i
}
(35)
Contractive Procedure: The idea is to substract
from the state partition D = ∪
i
D
i
defining the PWA
system, those regions for which one of the extreme
dynamics will evolve outside D. This is an iterative
procedure as long as after each iteration, the set D is
modified and thus the possible evolutions are to be
rechecked.
The complexity of the procedure is given by the
fact that the subtraction of convex set is not a closed
operation. In short, if D is convex, there is no guaran-
tee that it will remain convex after an iteration of the
contractive procedure. Indirectly this is acknowledg-
ing the fact that the MRPI set may not be convex.
Algorithm 1: Contractive Scheme
V
0
= D
k = 0
while
(precision condition)
V
k+1
=
PreIm
f
PWA
(Im
f
PWA
(V
k
) ∩V
k
)
k = k + 1
Expansive Procedure: In this case instead of ex-
cluding gradually those regions outside the MRPI set,
we start with an RPI set and add those regions which
evolve in one step inside the RPI set. Again the re-
sulting set is RPI and is monotonically increasing (in
the sense of inclusion) and is limited by MRPI.
An important advantage of the expansive proce-
dure is that the intermediate results are robust posi-
tive invariant and thus can be considered as candidate
approximations for the MRPI set.
Algorithm 2: Expansive Scheme
find
σ > 0 s.t. E(σ) ⊂ D
i
0
V
0
= E(σ)
k = 0
while
(precision condition)
V
k+1
= PreIm
f
PWA
(Im
f
PWA
(D) ∩V
k
)
k = k + 1
Note the maximal robust positive invariant set Ψ
and the iterates obtained with the expansive and con-
tractive procedure by Ψ
e
i
and Ψ
c
i
respectively.
Neither the expansive procedure Ψ
e
i
⊂ Ψ, nor the
contractive procedure Ψ
c
i
⊃ Ψ do not dispose of a
measure of the convergence toward the MRPI set.
However, by mixing the two relations we obtain an
inner approximation for the MRPI set:
Ψ
e
i
⊂ Ψ ⊂ Ψ
c
i
(36)
Considering the Hausdorff metric over the class
of polyhedra. The distance d
H
(Ψ
c
i
,Ψ
e
i
) can provide
a measure of the MRPI approximation offered by Ψ
e
i
and thus a precision condition:
Ψ
e
i
⊂ Ψ ⊂ Ψ
c
i
⊂ Ψ
e
i
⊕ B
0
(d
H
(Ψ
c
i
,Ψ
e
i
)) (37)
5 EXAMPLE
Consider the level control system as the one reported
in (Furtmueller and del Re, 2006) with the bloc rep-
resentation presented in figure 1. Beside the sen-
e
-sτ
Φ
1
s
u(t)
y(t)
Actuator Sensor
d(t)
Figure 1: General scheme for the plant to be controlled.
sor and the actuator transfer functions we retrieve in
this schema-block the variable time-delay; a nonlin-
ear function Φ known and invertible and an integra-
tor. The paper (Furtmueller and del Re, 2006) pre-
sented a method for the disturbance suppression, such
that in the following we will consider the level control
and replace the classical PI controller with a predic-
tive controller and characterize the safety functioning
region by the construction of the robust positive in-
variant region following the procedure presented in
the previous sections.
The continuous time system to be controlled is
a double integrator with variable-time delay and the
discrete-time model is given by:
x
k+1
=
1 0
0.1 1
x
k
+
0.1
0.05
u
k−i
−
∆(u
k−v
− u
k−v+1
), with v ∈ {0, 1,2}
(38)
In the first instance the embedding of the uncer-
tainty matrix ∆ have to be obtained. Due to the fact
that in the original representation, we deal with a 2-
dimensional state vector x
k
, the poytopic uncertainty
will be:
∆ ∈ Co
0
0
,
0.05
0
,
0
0.013
(39)
In the extended state representation, a robustly stabi-
lizing feedback gain is obtained for the unconstrained
case by solving the LMI problem (25):
K = [
−1.3188 −0.5408 −0.1292 −0.0157 −0.1511
] (40)
The inverse optimality problem leads after solving
(29) to the tuning of the nominal MPC law with the
weighting matrices P,Q,R. By imposing a set of con-
straints on the input and the state:
−0.1 ≤ u
k
≤ 0.1
−2
−2
≤ x
k
≤
2
2
(41)
and taking into account that the maximal delay is 3
sampling instants we choose a prediction horizon N =
MPC FOR SYSTEMS WITH VARIABLE TIME-DELAY - Robust Positive Invariant Set Approximations
181
5 in order to maintain a low complexity of the explicit
solution (47 regions in the state space partition, see
figure 2).
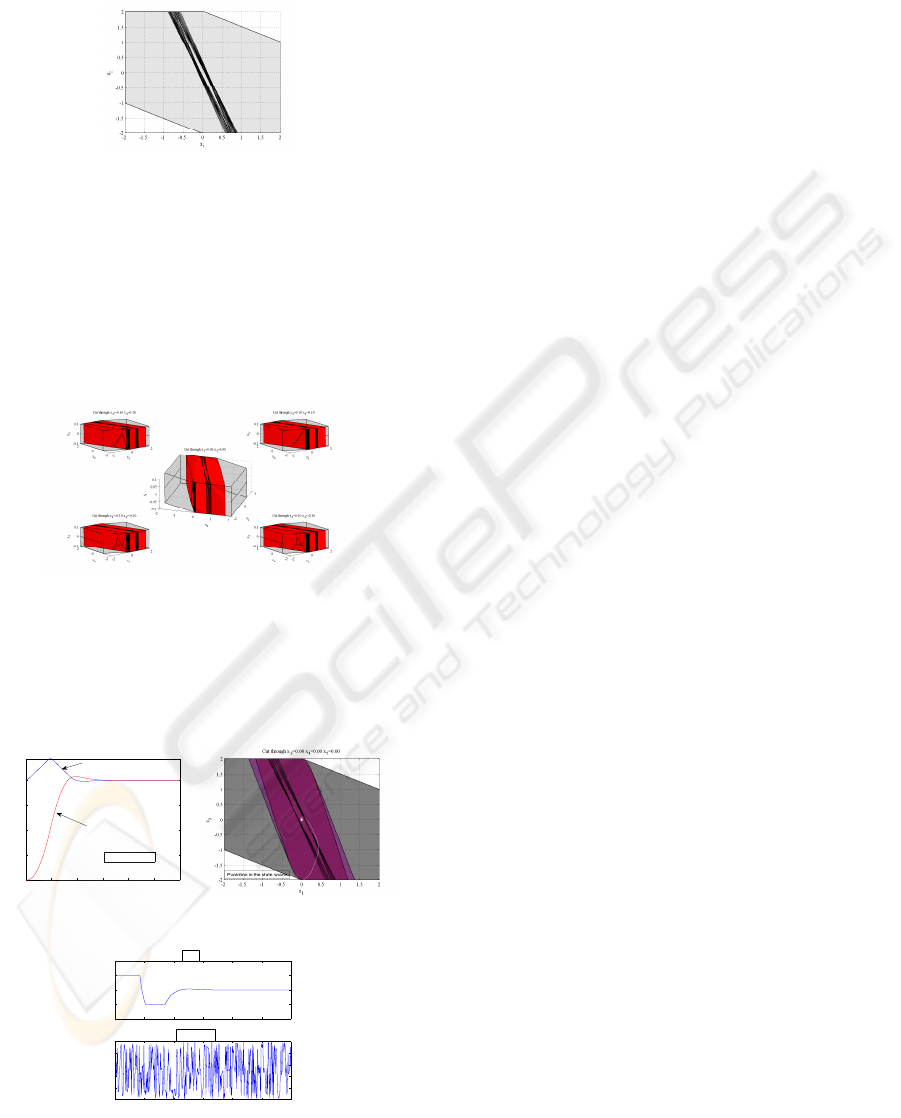
Figure 2: Projection of the explicit solution’s partition on
the first two components of the extended state space.
The polytopic model in the extended state rep-
resentation which embeds (using 7 extreme realiza-
tions) the time-varying delay system will allow the
use of the contractive procedure for the approxima-
tion of the maximal invariant set. In figure (3) cuttings
through the approximation obtained after 5 iterations
is presented.
Figure 3: The explicit solution’s partition and the approxi-
mation of the MRPI set.
Finally in figure (4-5) a time domain simulation
with varyingdelay is presented (starting from the state
(0;−2)), proving the versatility of the proposed con-
trol technique.
50 100 150 200 250 300
−2
−1.5
−1
−0.5
0
x
1
x
2
State evolution in time
Figure 4: The time evolution of the state components.
0 50 100 150 200 250 300
−0.2
−0.1
0
0.1
0.2
0 50 100 150 200 250 300
0.05
0.1
0.15
0.2
0.25
0.3
Variable delay
Input
Figure 5: The control signal and the variation of the delay
in time.
6 CONCLUSIONS
A model predictive control law was designed to deal
with time-varying delay systems. The constraints are
handled from the design stage and the iterative ap-
proximation of the maximal positive invariant set of-
fers information about the region of the state space
where the control policy is viable.
REFERENCES
Bemporad, A., Morari, M., Dua, V., and Pistikopoulos, E.
(2002). The explicit linear quadratic regulator for con-
strained systems. Automatica, 38:3–20.
Boyd, S., Ghaoui, L. E., Feron, E., and Balakrishnan, V.
(1994). Linear Matrix Inequalities in System and Con-
trol Theory. SIAM, Philadelphia, USA.
Dua, V., Pistikopoulos, E. N., and Georgiadis, M. C. (2007).
Multi-Parametric Model-Based Control: Theory and
Applications. Wiley-VCH Verlag, Germany.
Furtmueller, C. and del Re, L. (2006). Disturbance sup-
pression for an industrial level control system with
uncertain input delay and uncertain gain. In Proc. of
the IEEE Conf. on Control Applications, pages 3206–
3211.
Gilbert, E. and Tan, K. (1991). Linear systems with state
and control constraints: The theory and application of
maximal output admissible sets. IEEE Transactions
on Automatic Control, 36:1008–1020.
Goodwin, G., Seron, M., and Dona, J. D. (2004). Con-
strained Control and Estimation. Springer, Berlin.
Kalman, R. E. (1964). When is a linear control system op-
timal? Trans. ASME, Journal of Basic Engineering,
Series D, 86:81–90.
Kothare, M., Balakrishnan, V., and Morari, M. (1996). Ro-
bust constrained model predictive control using linear
matrix inequalities. Automatica, 32:1361–1379.
Larin, V. (2003). About the inverse problem of optimal con-
trol. Journal of Applied and Computational Mathe-
matics, 2:90–97.
Maciejowski, J. (2002). Predictive Control with Con-
straints. Prentice Hall, England.
Mayne, D., Rawlings, J., Rao, C., and Scokaert, P. (2000).
Constrained model predictive control: Stability and
optimality. Automatica, 36:789–814.
Michiels, W. and Niculescu, S.-I. (2007). Stability and sta-
bilization of time-delay systems. An eigenvalue based
approach. SIAM, Philadelphia, USA.
Niculescu, S.-I. (2001). Delay effects on stability. A robust
control approach. Springer, Heidelberg.
Olaru, S. and Dumur, D. (2005). Avoiding constraints
redundancy in predictive control optimization rou-
tines. IEEE Transactions on Automatic Control,
50(9):1459–1466.
Olaru, S. and Niculescu, S.-I. (2008). Predictive control
for linear systems with delayed input subject to con-
straints. In Proceedings of the IFAC World Congress.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
182
