
INTELLWHEELS
A Development Platform for Intelligent Wheelchairs for Disabled People
Rodrigo A. M. Braga
1,2
, Marcelo Petry
2
, Antonio Paulo Moreira
2
and Luis Paulo Reis
1,2
1
Artificial Intelligence and Computer Science Lab-LIACC
2
Faculty of Engineering of University of Porto, Rua Dr. Roberto Frias, s/n 4200-465, Porto, Portugal
Keywords: Intelligent Wheelchair, Intelligent Robotics, Human-Robots Interfaces.
Abstract: Many people with disabilities find it difficult or even impossible to use traditional powered wheelchairs
independently by manually controlling the devices. Intelligent wheelchairs are a very good solution to assist
severely handicapped people who are unable to operate classical electrical wheelchair by themselves in their
daily activities. This paper describes a development platform for intelligent wheelchairs called IntellWheels.
The intelligent system developed may be added to commercial powered wheelchairs with minimal
modifications in a very straightforward manner. The paper describes the concept and design of the platform
and also the intelligent wheelchair prototype developed to validate the approach. Preliminary results
concerning automatic movement of the IntellWheels prototype are also presented.
1 INTRODUCTION
Wheelchairs are important locomotion devices for
handicapped and senior people. With the increase in
the number of senior citizens and the increment of
people bearing physical deficiencies in the social
activities, there is a growing demand for safer and
more comfortable Intelligent Wheelchairs (IW) for
practical applications. The main functions of IWs
are (Jia, 2005) (Faria, 2007a) (Faria, 2007b):
• Interaction with the user, including hand based
control (such as, joystick, keyboard, mouse,
touch screen); voice based control; vision based
control and other sensor based control (such as
pressure sensors);
• Autonomous navigation (with safety, flexibility
and robust obstacle avoidance);
• Communication with other devices (like
automatic doors and other Wheelchairs).
This paper discusses the concept and the design
of a development platform for intelligent
wheelchairs. The project, called IntellWheels, is
composed of a control software, simulator/
supervisor and a real prototype of the intelligent
wheelchair. In the study, shared control and high-
level planning algorithms applied in an IW operating
in a hospital environment were developed and
tested. A shared control algorithm was tested,
allowing the IW to automatically avoid dangerous
situations. Also, typical algorithms used in most
intelligent robotics applications were applied in the
control of the IW and simulated in a hospital
scenery. Blended with the control, a motion planner
was developed capable of generating the
behavior/path commands according to an a-priori
created map of the world. This motion planner is
capable of instructing the low-level motion
controller module to achieve the high-level
commands desired by the user (Luo, 1999).
The rest of the paper is subdivided as following
different sections: Section 2 presents some related
work; section 3 explains the hardware desing of our
development plataform; section 4 and 5 contain a
complete description of the software design and
control system; section 6 provides experimental tests
and result discussion and section 7 presents the final
conclusions and points out some future research
topics.
2 RELATED WORK
This section presents a brief to the state of the art
about Intelligent Wheelchairs.
In recent years, many intelligent wheelchair have
been developed (Simpson, 2005). Only in the year of
115
A. M. Braga R., Petry M., Paulo Moreira A. and Paulo Reis L. (2008).
INTELLWHEELS - A Development Platform for Intelligent Wheelchairs for Disabled People.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - RA, pages 115-121
DOI: 10.5220/0001501701150121
Copyright
c
SciTePress
2006 more than 30 publications in IEEE, about IW,
may be found.
One of the first concept projects of an
autonomous wheelchair for handicapped physicists
was proposed by Madarasz (Madarasz, 1986). He
presented a wheelchair equipped with a
microcomputer, a digital camera, and ultrasound
scanner. His objective was to develop a vehicle
capable to operate without human intervention in
populated environments with little or no collision
with the objects or people contained in it.
Hoyer and Holper (Hoyer, 1993) presented an
architecture of a modular control for a omni-
directional wheelchair. NavChair is described in
(Simpson, 1998), (Bell, 1994), (Levine, 1997) and
has some interesting characteristic such as wall
following, automatic obstacle avoidance, and
doorways passing capabilities.
Miller and Slak (Miller, 1995) (Miller, 1998)
projected the Tin Man I system, initially with three
ways of operation: human guided with obstacle
avoidance, move forward along a heading, move to a
point (x, y). Afterwards, the project Tin Man I
evolved, resulting in several new functions,
extended in the Tin Man II, by including new
capabilities such as: backup, backtracking, wall
following, doorway passing, and docking.
Wellman (Wellman, 1994) proposed a hybrid
wheelchair which is equipped with two legs
additionally to the four wheels, which enable the
wheelchair to climb over steps and move through
rough terrain.
Some projects presented solutions for people
with tetraplegia, by using the recognition of facial
expressions as the main input to guide the
wheelchair (Jia, 2006), (Pei, 2001), (Adachi, 1998).
Another method of control is by using the user
“thoughts”. This technology typically uses sensors
that measure the electromagnetic waves of the brain
(Lakany, 2005) (Rebsamen, 2007).
ACCoMo (Hamagami, 2004) is a prototype of an
IW that allows for safe movement in indoor
environments for the handicapped physicists.
ACCoMo is an agent based prototype with simple
autonomous, cooperative and collaborative
behaviors.
Although several prototypes have been
developed and different approaches have been
proposed for IWs, there is not, at the moment, a
proposal for a platform enabling easy development
of Intelligent Wheelchairs using common electric
powered wheelchairs with minor modifications.
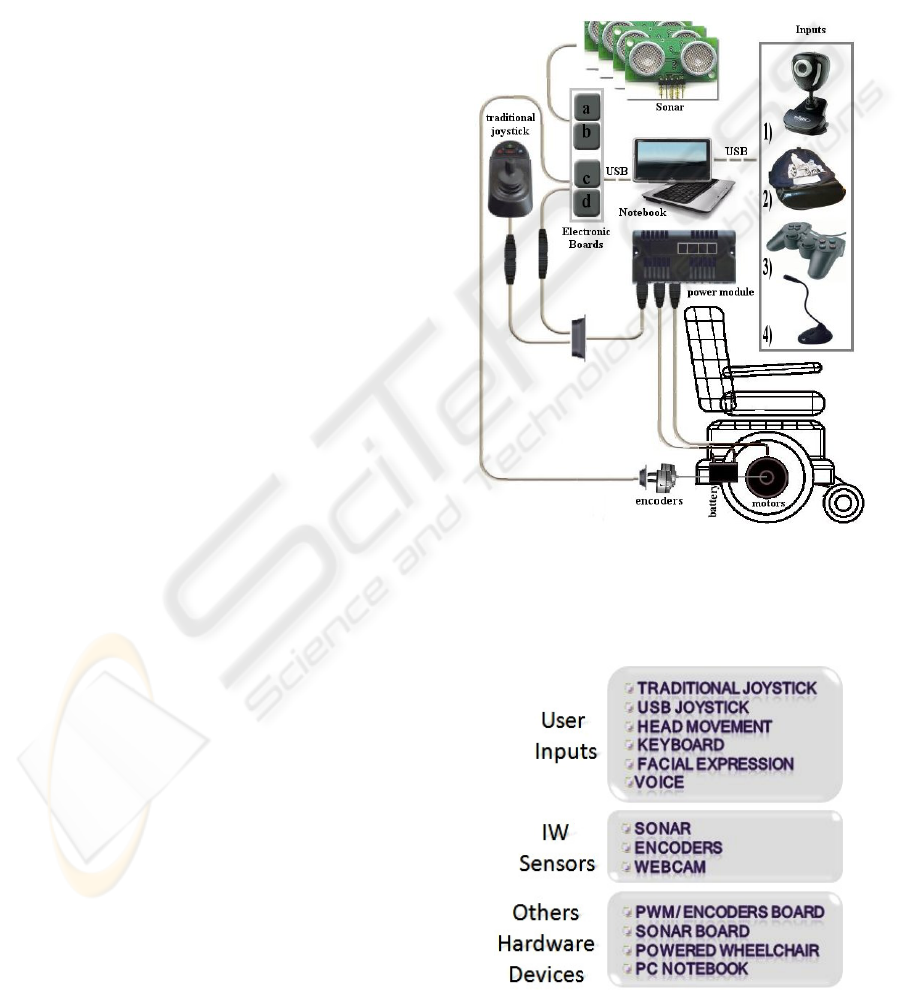
3 HARDWARE DESIGN
The hardware architecture of IntellWheels prototype
is shown in Figure 1. The IntellWheels_chair1 is
based on a commercial electrical wheelchair model
Powertec, manufactured by Sunrise in England
(Sunrise, 2007). The Powertec wheelchair has
following features: Two differentially driven rear
wheels; Two passive castor front; Two 12V batteries
(45Ah); Traditional Joystick; Power Module.
Figure 1: Hardware Architecture of IntellWheels.
The IntellWheels hardware parts are divided in three
functional blocks: user inputs, IW sensor, hardware
devices. This blocks are depicted in Fig. 2.
Figure 2: Hardware Functional Blocks.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
116

3.1 User Inputs
To enable people with different kinds of disabilities
to drive the intelligent wheelchair, this project has
incorporated several sorts of user inputs. The idea is
to give options to the patients, and let them choose
what control is more comfortable and safer. Besides
that, multiple inputs makes possible the IntellWheels
integration with an intelligent input decision control,
which is responsible to cancel inputs in the case its
perception recognizes conflicts, noise and danger.
For example, in a noisy environment, voice
recognition would have low rate or even would be
canceled. The inputs implemented go from
traditional joysticks until head movement control,
and are explained bellow:
• Traditional Joysticks. These inputs present in
ordinary wheelchairs are a robust way to drive a
wheelchair. However they may not be accessible to
paraplegic or cerebral palsy people. They are present
in the prototype due to its simplicity;
• USB Joystick. The USB joysticks are a little bit
more sophisticated than traditional joysticks. This
game joystick has many configurable buttons that
makes the navigation easier;
• Head Movement. This input device is mounted in
a cap making it possible to drive the wheelchair just
with head movement;
• Keyboard. This device enables that the
wheelchair control can be made just pushing some
keys in the keyboard;
• Facial Expressions. By using a simple webcam,
present in most of the notebooks, this software
recognize simple facial expressions of the patient,
using them as inputs to execute since basic
commands (like: go forward, right and left) to high
level command (like: go to nursery, go to bedroom);
• Voice. Using commercial software of voice
recognition we developed the necessary conditions
and applications to command the wheelchair using
the voice as an input.
The use of a vast set of input options enables the
prototype to be easily controlled by patients
suffering from distinct disabilities.
3.2 Sensors
The purpose of this project is to develop an
intelligent wheelchair. The distinction between an
IW and a robotic wheelchair is not just semantic. It
means that we want to keep the wheelchair
appearance, reducing the visual impact that the
sensors mounted on the device produce but, at the
same time, increasing the wheelchair regular
functionalities. This statement limits the number and
the kind of sensors we are able to use due to size,
appearance and assembly constraints. To compose
the intelligent wheelchair ten sonar sensors were
mounted (giving the ability to avoid obstacles,
follow walls and perceive unevenness in the
ground), two encoders were assembled on the
wheels (providing the tools to measure distance,
speed, position) and a webcam were placed directed
to the ground (capable to read ground marks and
refine the odometry).
3.3 Hardware Devices
The hardware devices block is composed of (Fig. 3):
• 2 sonar board (Electronic board ‘a’ and ‘b’
illustrated in the Figure 1 and Figure 2), the function
‘a’ and ‘b’ boards are receiving information of the
ten sonars and sending it to the PC;
• 2 PWM/Encoders board (Electronic board ‘c’
and ‘d’), these boards have speed control function,
as well as sending to the PC the displacement
information to enable the odometry;
• Commercial electrical wheelchair and commercial
notebook.
The core of IntellWheels prototype is a PC notebook
(HP Pavilion tx1270EP,AMD Turion 64 X2 TI60),
although other notebooks could be used without any
loss of capabilities.
Figure 3: Devices installed in IW.
4 SOFTWARE DESIGN
The software in this project is composed by a
modular system, where each group of tasks interact
with the main application. Figure 4 shows the
specific functions and the software responsible to
INTELLWHEELS - A Development Platform for Intelligent Wheelchairs for Disabled People
117
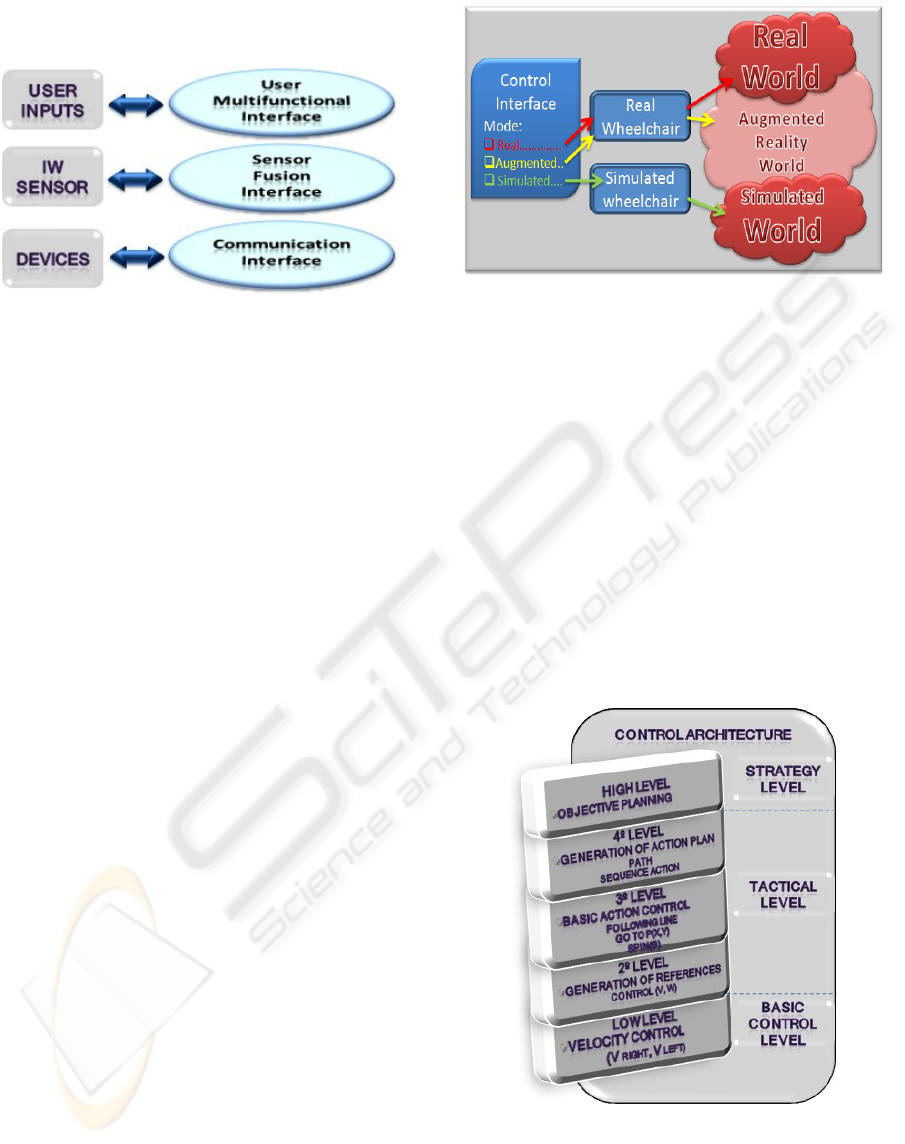
convert data from hardware to be used in the control
level.
Figure 4: Intelligent Wheelchair Software.
The main application has the function to gather
all information from the system, communicate with
the control module and set the appropriate output.
Moreover, it has other different functions depending
on what is the control interface mode set:
• Real. If this option is selected, all data
comes from the real world. The main application
collects real information from sensors through the
Sensor User Interface, calculate the output through
the Control module and send these parameters to the
PWM Boards;
• Simulated. In this mode, the system works
just with virtual information and is used for two
purposes: generate the same behavior of a real
wheelchair and to test control routines. The main
application collects virtual information directly from
the simulator, calculates the output through the
Control module and send back these parameters to
the simulator;
• Augmented Reality. This mode creates an
interaction between real and virtual objects,
changing a real wheelchair’s path to avoid collision
with a virtual wall (or with a virtual wheelchair) for
example. The objective of the augmented reality is
to test the interaction between wheelchairs and
environment, reducing its costs once major agents
can be simulated. The main application collects real
information from the sensors through the Sensor
User Interface and mix it with virtual information
collected from the simulator, calculate the output
through the Control module and send the parameters
to the simulator and the PWM Boards.
Due to its capabilities to interact with real,
simulated and augmented reality worlds we call this
whole system: IW Platform (Figure 5). In other
words, the Platform is the fusion of the Simulator,
Software modules, Real Wheelchair and Hardware
Devices, to test, preview, understand and simulate
the behaviour of Intelligent Wheelchairs.
Figure 5: Intelligent Wheelchair Platform Architecture.
5 CONTROL
IntellWheels has a multi-level control architecture
subdivided in three levels: a basic control level, a
tactical level and strategy level, as shown in Fig. 6.
As focus is primarily testing the Platform, classic
algorithms were chosen to validate the system, some
other issues are left outside the scope of this paper,
such as analyses of its limitations and its
performance. High Level strategy plan is responsible
to create a sequence of high level actions needed to
achieve the global goal. Actually the algorithm
implemented to fulfill this task is based on the
STRIPS planning algorithm (Fikes, 1971).
Figure 6: Control architecture.
In the Generation of Action Plans, we order the
system to generate a sequence of basic actions
aiming to satisfy the objectives proposed previously.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
118
To find a path from a given initial node to a given
goal node the system has a simple A* Algorithm
implemented (Shapiro, 2000). Once the path is
calculated, it is subdivided into basic forms (lines,
circles, points) that are afterwards followed by the
wheelchair.
Each basic form represents a basic action to be
executed on time in the Basic Action Control
module. Following that the system executes the
Generation of References, which is responsible to
estimate the wheelchair linear and angular speeds,
putting the wheelchair into motion.
The lowest level of control is designed through a
Digital PID implemented in the PWM/Encoders
Boards. References from Basic Action are
transferred by serial communication to the boards
and then contrasted with real time data to control the
speed.
6 EXPERIMENTS AND RESULTS
This section presents the prototype implementation
and a simple experiment and the results achieved.
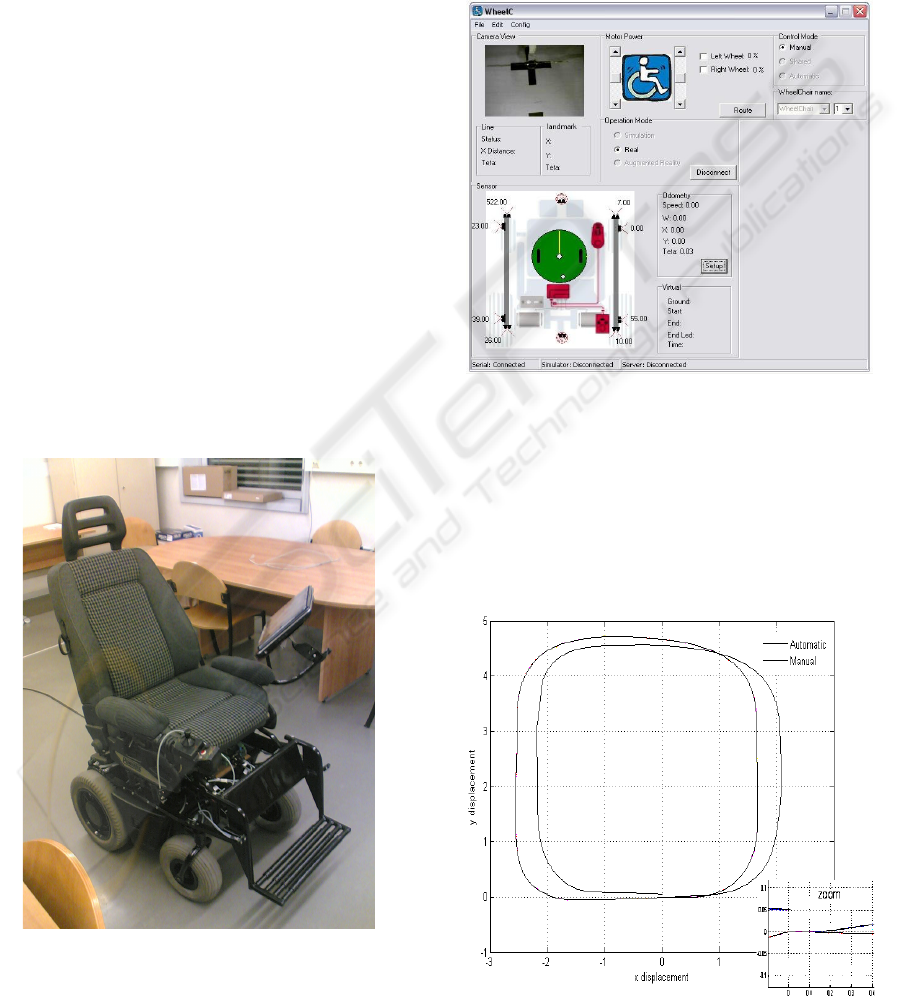
Figure 7 shows the mechanical structure and the
hardware implementation. As we can see, the
prototype is a commercial electric powered
wheelchair with minimal modifications.
Figure 7: IntellWheels_Chair1 Prototype.
User interface software was designed to be as
friendly as possible and it is shown in Figure 8. In
the main window it contains a webcam window,
which is used to recognize landmarks, and the
results of its localization. A schematic figure with
the position of the sonar mounted in the wheelchair
easily shows the distance to nearby objects. By the
side, we have a panel with the information provided
by the odometry. The application still displays a
scrollbar indicating the speed of each wheel as well
as buttons to choose the operation mode.
Figure 8: Interface Control of IntellWheels.
Some basic tests were performed to validate
odometry, and consisted in moving the wheelchair
around a rectangle path, starting and stopping in the
same point. In Figure 9 the results of an automatic
test (red line) and a manual test (blue line) are
presented. In the manual test the user had all control
of the wheelchair.
Figure 9: Path Followed by Wheelchair in the Tests.
INTELLWHEELS - A Development Platform for Intelligent Wheelchairs for Disabled People
119
In the automatic mode the final point of the path
of the wheelchair presented a little displacement
regarding its start point (physical mark point on the
ground). As this error is not displayed in the
odometry graph, a Manual test was executed to
evaluate the results. In this test, the user drove the
wheelchair following the same path, but at this time
stopping in the same physical mark point on the
ground. Results of this test presented the error
displayed in the odometry graph.
The error presented is admissible since it is just 5
cm in a total amount of 1500 cm of displacement,
and can be explained by the integration of the
odometry systematic error.
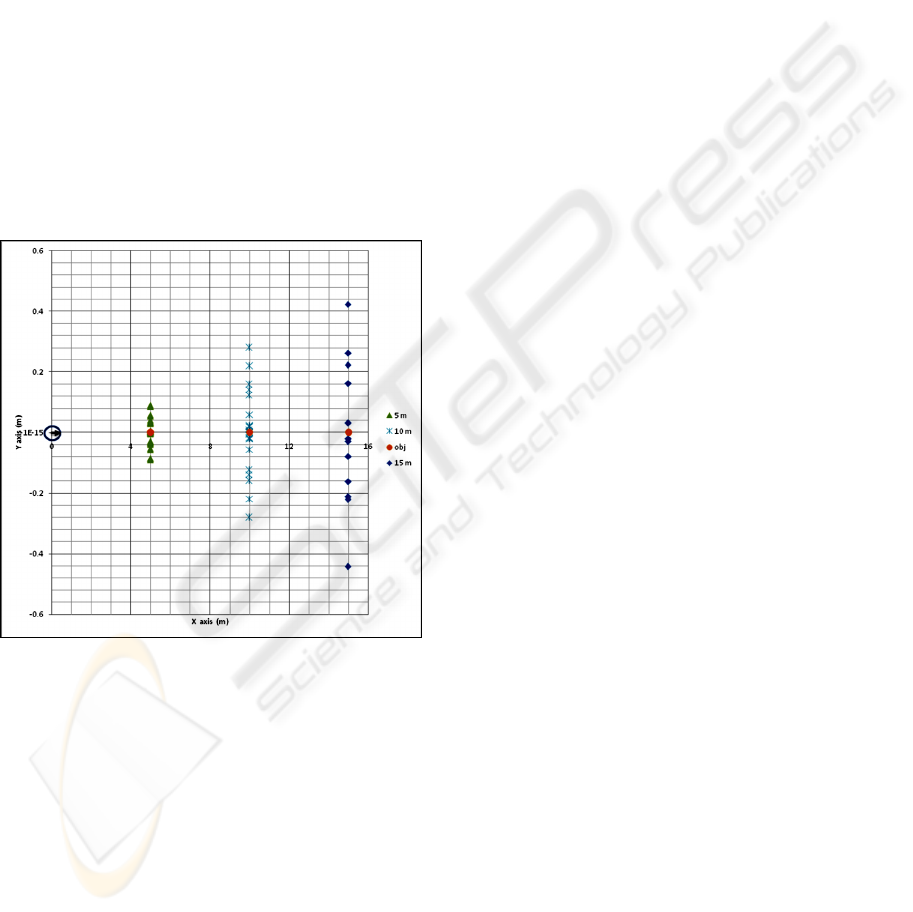
Figure 10 shows the results of distinct tests of
displacement in straight line. The objective was
evaluate odometry dispersion error for different
distances. In this test was valued displacement of 5,
10 and 15 meters, with approximately 20 samples
for each path.
Figure 10: Odometry dispersion error for 5m, 10m and
15m of displacement in straight line.
7 DISCUSSION AND
CONCLUSIONS
This paper presented the design and implementation
of a development platform for Intelligent
Wheelchairs called IntellWheels.
This platform facilitates the development and test
of new methodologies and techniques concerning
Intelligent Wheelchairs. We believe that this new
techniques can bring to the wheelchairs real
capacities of intelligent action planning, autonomous
navigation, and mechanisms to allow the execution
in a semi-autonomous way of the user desires,
expressed in a high-level language of command.
Future research will aim the test and validation
for the other sensors mounted in the wheelchair.
Moreover, like in many other systems, cooperative
and collaborative behaviours are desired to be
present in the IW and need to be incorporated in the
Platform. Another important improvement to be
pursued includes a comparative study of the classic
implemented algorithms and the new proposal to
solve these issues.
The platform will allow that real and virtual IWs
interact with each other. These interactions make
possible high complexity tests with a substantial
number of devices and wheelchairs, representing a
reduction in the project costs, once there is not the
necessity to build a large number of real IW.
ACKNOWLEDGEMENTS
The first author would like to thank for CAPES for
doctoral course financing.
REFERENCES
Adachi,Y., Kuno, Y., Shimada, N., Shirai, Y., 1998.
Intelligent wheelchair using visual information on
human faces. International Conference in Intelligent
Robots and Systems. Oct. Vol. 1. pp. 354-359.
Bell, D.A., Borenstein, J., Levine, S.P., Koren, Y., and
Jaros, L., 1994. An assistive navigation system for
wheelchairs based upon mobile robot obstacle
avoidance. IEEE Conf. on Robotics and Automation.
Faria, P. M., Braga, R A. M., Valgôde, E., Reis L. P.,
2007a. Platform to Drive an Intelligent Wheelchair
using Facial Expressions. Proc. 9th International
Conference on Enterprise Information Systems -
Human-Computer Interaction (ICEIS 2007). pp. 164-
169. Funchal Madeira, Portugal. June 12–16. ISBN:
978-972-8865-92-4
Faria, P. M., Braga, R. A. M., Valgôde, E., Reis, L. P.,
2007b. Interface Framework to Drive an Intelligent
Wheelchair Using Facial Expressions. IEEE
International Symposium on Industrial Electronics. 4-
7 de June de 2007, pp. 1791-1796, ISBN: 1-4244-
0755-9.
Fikes, R., Nilsson, N. J., 1971. STRIPS: A New Approach
to the Application of Theorem Proving to Problem
Solving. IJCAI 1971. pp.608-620.
Hamagami, T., Hirata, H., 2004. Development of
intelligent wheelchair acquiring autonomous,
cooperative, and collaborative behavior. IEEE
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
120

International Conference on Systems, Man and
Cybernetics. Oct. Vol. 4. pp. 3525 - 3530.
Hoyer, H. and Hölper, R., 1993. Open control architecture
for an intelligent omnidirectional wheelchair. Proc.1st
TIDE Congress, Brussels. pp. 93-97.
Jia, P. and Hu, H., 2005. "Head Gesture based Control of
an Intelligent Wheelchair", CACSUK - 11th Annual
Conference of the Chinese Automation and
Computing Society in the UK, Sheffield, UK, Sept. 10.
Jia, P., Hu, H., Lu, T. and Yuan, K., 2006. Head Gesture
Recognition for Hands-free Control of an Intelligent
Wheelchair. Journal of Industrial Robot.
Lakany, H. 2005. Steering a wheelchair by thought. The
IEEE International Workshop on Intelligent
Environments. June. pp. 199 - 202.
Levine, S.P., Bell, D.A., Jaros, L.A., Simpson, R.C.,
Koren, Y., Borenstein, J., 1997. The NavChair
assistive wheelchair navigation system. IEEE
Transactions on Rehabilitation Engineering pp. 443-451.
Luo, R. C., Chen, T. M. and Lin, M. H., 1999. Automatic
Guided Intelligent Wheelchair System Using
Hierarchical Grey-Fuzzy Motion Decision-Making
Algorithms, Proc. of IEEVRSJ’99 - International
Conference on Intelligent Robots and Systems.
Madarasz, R.L., Heiny, L.C., Cromp, R.F. and Mazur,
N.M., 1986. The design of an autonomous vehicle for
the disabled, IEEE J. Robotics and Automat.
September, pp. 117 - 126.
Miller, D. and Slack, M., 1995. Design and testing of a
low-cost robotic wheelchair prototype. Autonomous
Robots. Vol. 2, pp. 77-88.
Miller, D., 1998. Assistive Robotics: An Overview.
Assistive Technology and AI. pp. 126-136.
Pei Chi Ng; DeSilva, L.C., 2001. Head gestures
recognition. Proceedings International Conference on
Image Processing. Oct. Vol. 3. pp. 266-269. ISBN: 0-
7803-6725-1.
Rebsamen, B., Burdet, E., Guan, C., Zhang, H., Teo, C. L.,
Zeng, Q., Laugier, C., Ang Jr., M. H., 2007.
Controlling a Wheelchair Indoors Using Thought.
IEEE Intelligent Systems and Their Applications. Vol.
22, pp. 18 – 24.
Shapiro S.C., 2000. Encyclopedia of Artificial
Intelligence. Wiley-Interscience. May.
Simpson, R. C., 2005. Smart wheelchairs: A literature
review. Journal of Rehabilitation Research &
Development. August. Vol. 42. pp. 423-436.
Simpson, R. et al. 1998. NavChair: An Assistive
Wheelchair Navigation System with Automatic
Adaptation. [ed.] Mittal et al. Assistive Technology
and AI. pp. 235-255.
Sunrise, 2007. Sunrise Medical manufacturers
www.sunrisemedical.co.uk
Wellman, P., Krovi, V. and Kumar, V., 1994. An adaptive
mobility system for the disabled. Proc. IEEE Int. Conf.
on Robotics and Automation.
INTELLWHEELS - A Development Platform for Intelligent Wheelchairs for Disabled People
121
