
USING ROBOTIC SYSTEMS IN A SMART HOUSE FOR PEOPLE
WITH DISABILITIES
Viorel Stoian and Cristina Pana
CCMR Craiova - University of Craiova, Decebal Street No. 107, Craiova, Romania
Keywords: The assistive technology, smart house, robots and mobile robots, edutainment, robot control, artificial
potential field method.
Abstract: We present in this paper several ideas about the usability of the robotic arms and mobile robots as an
assistive technology in a smart house where people with disabilities daily live. First, psychological and
social aspects of smart home technology are presented and after that the modularity and standardization
processes are discussed. Next we propose a smart house plan, equipped with a mobile robot which has a
manipulator arm. This robotic system is used to help vulnerable persons, the handicapped men vehicle seat
being equipped with a robotic arm which can manipulate objects by a hyper-redundant gripper. For the
control of the processes in the smart house, we propose a hierarchical control system and for the mobile
robot we use the artificial potential field method. Also, this paper points out the edutainment concept
(EDUcation and enterTAINMENT) by robotics. Finally, some applications are presented.
1 INTRODUCTION
Technology can play a major role in assisting
process of the people in their daily life. Designing
smart environments is a goal that appeals to
researchers in a variety of disciplines, including
artificial intelligence, pervasive and mobile
computing, robotics, middleware and agent-based
software, sensor networks, and multimedia
computing (Cook, Das, 1989). Because smart
environment research is being conducted in real-
world, physical environments, design and effective
use of physical components such as sensors,
controllers, and smart devices are vital.
We define a smart environment as one that is
able to acquire and apply knowledge about the
environment and its inhabitants in order to improve
their experience in that environment (Youngblood et
al., 2005).
Systems are required to be robust and reliable as
the person with disabilities will rely on the installed
devices and they will become internalized within
their self-concept (Dewsbury, Edge, 2000, 2001),
(Lupton, 2000).
Some of the properties of the environment need
to be captured and they can be measured thus:
motion properties (position, velocity, angular
velocity, acceleration), presence (tactile/contact,
proximity, distance/range, motion), biochemical
(biochemical agents), physical properties (pressure,
temperature, humidity, flow), contact properties
(strain, force, torque, slip, vibration), identification
(personal features, personal ID) (Lewis, 2004).
The information required by smart environments
is measured by sensors and collected using sensor
networks. These sensor networks are responsible for
acquiring and distributing data needed by smart
buildings, utilities, industries, homes, ships, and
transportation systems. Sensor networks need to be
fast, easy to install and maintain, and self-
organizing.
There are many potential uses for a smart
environment. With the maturing of smart
environment technologies, at-home automated
assistance can allow people with mental and
physical challenges to lead independent lives in their
own homes. Pollack (Pollack, 2005) categorizes
such assistive technology as meeting the goals of
assurance (making sure the individual is safe and
performing routine activities), support (helping
individual compensate for impairment), and
assessment (determining physical or cognitive
status) (Cook and Das, 1989).
Pineau, et al. (Pineau, 2003) demonstrate the
benefits of robotic assistants in nursing homes, while
Helal, et al. (Helal, 2005) provide a visitor-
281
Stoian V. and Pana C. (2008).
USING ROBOTIC SYSTEMS IN A SMART HOUSE FOR PEOPLE WITH DISABILITIES.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics, pages 281-286
DOI: 10.5220/0001502902810286
Copyright
c
SciTePress

identifying front door, inhabitant-tracking floor and
a smart mailbox to volunteer seniors living in the
Gator Tech Smart Home. Kautz, et al. (Kautz, 2002)
show that assistance is not limited to a single
environment. Using their activity compass, the
location of an individual can be tracked, and a
person who may have wandered off can be assisted
back to their goal (or a safe) location.
Finally, smart environments can be used to
actually determine the cognitive impairment of the
inhabitants. Carter and Rosen (Carter and Rosen,
1999) demonstrate such an assessment based on the
ability of individuals to efficiently complete kitchen
tasks.
While performance measures can be defined for
each technology within the hierarchical architecture,
performance measures for entire smart environments
still need to be established.
(Mann and Bendixen, 2007) makes a distribution
of the assistive technology in a smart house on eight
levels, from the lowest level (basic communications)
to eighth level (household arrangements).
Most people see robotics as being a vital technology
for providing society with the assistive solutions that
it needs in present and will need in the future. The
purpose of Assistive Technology (AT) is to provide
assistance, without to be a substitution for personal
care, to enable people to lead a better quality of life.
This technology was applied to devices for personal
use created specifically to enhance the physical,
sensory and cognitive abilities of people with
disabilities and to help them function more
independently in environments oblivious to their
needs (Story, Mueller and Mace, 1998). People with
disabilities are the principal beneficiaries of the
technological growth.
2 PSYCHOLOGICAL AND
SOCIAL ASPECTS OF SMART
HOME TECHNOLOGY
The use of technology appears to present dramatic
compromises in social activities, role definition, and
identity (Gitlin, 1995).
Approximately all older persons and people with
disabilities might feel that they are not included in
discussions on technology, as it is perceived as
irrelevant to their needs.
Isolation is a major problem for any person who
is older or has a debilitating disability (Marshall
2000).
People who are incapacitated in some way are at
the mercy of others to provide the simple basic
needs. People who do not have disabilities should
not to be concerned with food, shelter or human
contact as they are part of every day life. It is there
essential that people with disabilities are not given
substandard care packages that do not meet their
needs in all areas: social, psychological, physical,
social and emotional. Similarly, care packages
should not be over technologies so that the person is
reduced to being the slave of technology (Dewsbury,
Edge and Taylor, 2001; Dewsbury, 2001).
3 EDUTAINMENT BY ROBOTICS
FOR PEOPLE WITH
DISABILITIES
Edutainment is a neologism with is derived from the
expression “EDUcation by enterTAINMENT”
(Muscato and Longo, 2003). It means “Learning and
playing”. In the edutainment systems or products are
included different elements that have been designed
to teach or to train persons and at the same time to
entertain those persons. For young people with
disabilities is very important to learn reading and
writing. In the future is very important toad to these
processes initiation and learning new assistive
technology and devices (computer science, internet,
telecommunications, robotics, flexible automation
etc.) with will be present inside each smart home.
Edutainment has a great success, especially, to
young people. A person with disabilities can get
through 5 levels of the edutainment which cover a
large period of time, from pre-school level to
researchers’ and practitioners’ level: pre-school,
kindergarten, school, university, and applications/
research (Stoian, Bizdoaca and Pana, 2006). On the
last level the researchers design systems and
applications for the others levels.
4 MODULARITY AND
STANDARDIZATION
(Virk, 2003) focuses on the state of play of
component modularity and standardization in a
number of application sectors that have good
potential for adopting the robotics technology in the
near future. In a smart house for people with
disabilities there are many and different
technological systems. Because the design of such
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
282

mechatronic systems is very complex, is necessary
to split this design problem into specific areas of
mechanics, sensor systems, actuators and powering
systems, communication interfaces and hardware
and software components of the computing process.
In this mode is easier to develop a generic
methodology.
The modular design methodology supposes to
enable the individual modules to be designed as
black boxes that interact with one another via an
interaction space (data buses, intelligent actuators,
intelligent sensors, intelligent power supply,
mechanics, and controllers). The design process
should include aspects of standardization so that
wider issues of open components can be determined.
This can be done by looking for specific application
areas and establishing the status in each from the
viewpoint of where the technologies are and what
the status as regards standards is and what are the
future requirements.
5 A PROPOSAL FOR A SMART
HOUSE DESIGN
Here we propose a map of a smart house where live
vulnerable people (Figure 1). HMVS means
Handicapped Men Vehicle Seat and MR means
Mobile Robot. These devices with locomotion
facilities are controlled by smart systems (controllers
or computers) and implement some methods or
algorithms lake in Section 7.
Figure 1: A smart house map.
The external areas can be compound from
garden, terrace, drive way, entrance, and stairs. The
internal areas can be termed circulation and external
for the others and can be compound from: kitchen,
living room, bedroom, bathroom, and general. This
area has minimal physical barriers between the
rooms. Technological systems could be allocated to
these functional areas. Some systems (for example,
motorized windows or doors), may be the same
(physically and functionally) in more than one
functional area. This is especially the case for people
with long-term degenerative conditions whose
quality of life can be enhanced by judicious
introduction of this technology (Edge, Taylor,
Dewsbury and Groves, 2000).
Systems map to one or more rooms (functional
areas). A system that is not mapped to any
functional area is not required. Also many of these
systems will interact with each other. Some systems
may be sufficiently interconnected that they would
be better treated as two parts of one bigger system.
It is concluded than that there are two basic types
of mapping: either a system will map to one or more
rooms (functional areas) or a functional area will
map to one or more systems.
6 THE MOBILE ASSISTANT
ROBOTS
In this section we propose two solutions which
presuppose the use of the robotic systems. First, we
propose the installation of a robotic arm on the
handicapped men vehicle seat (Figure 2).
Figure 2: Handicapped men vehicle seat with robotic arm.
This arm can execute different actions and
different functions which the vulnerable persons are
USING ROBOTIC SYSTEMS IN A SMART HOUSE FOR PEOPLE WITH DISABILITIES
283

deprived of. It is endowed with a hyper-redundant
gripper. The gripper can manipulate different objects
with different forms (Figure 3).
Figure 3: The hyper-redundant gripper of the arm.
Second, we propose a mobile robot with
anthropomorphic arm which is endowed with an
anthropomorphic manipulator (Figure 4).
Figure 4: Mobile robot with anthropomorphic arm.
This device can run inside of internal and
external areas and can satisfy many needs of the
resident. For example, it can grip and bring a cup of
tee, milk or coffee.
7 MOBILE ROBOT CONTROL
BY ARTIFICIAL POTENTIAL
FIELD METHOD
7.1 The Artificial Potential Field
Approach
In order to avoid the difficulties associated with the
dynamical model, the control law is based only on
the gravitational potential and a new artificial
potential. It is shown that to drive the mobile robot
to a desired point in an unconstrained movement is
necessary the artificial potential to be a potential
functional whose point of minimum is attractor for
the system. Also, this method is used for a
constrained movement in the environment with
obstacles. The target position is represented by an
artificial attractive potential field and obstacles by
corresponding repulsive fields, so that the trajectory
to the target can be associated with the unique flow-
line of the gradient field through the initial position
and can be generated via a flow-line tracking
process. This approach is suitable for real-time
motion planning of robots since the algorithm is
simple and computationally much less expensive
than other methods based on global information
about the task space. It is difficult in the artificial
potential field framework to regulate the transient
behaviour of the generated trajectories such as the
movement time to the target and the shape of the
velocity profile. For example, even if the potential
function without local minima is used, it is difficult
to estimate the movement time required for reaching
beforehand.
Potential field was originally developed as on-
line collision avoidance approach, applicable when
the robot does not have a prior model of the
obstacles, but senses them during motion execution
(Khatib, 1986). Using a prior model of the
workspace, it can be turned into a systematic motion
planning approach. Potential field methods are often
referred to as “local methods”. This comes from the
fact that most potential functions are defined in such
a way that their values at any configuration do not
depend on the distribution and shapes of the
obstacles beyond some limited neighbourhood
around the configuration. The potential functions are
based upon the following general idea: the robot
should be attracted toward its goal configuration,
while being repulsed by the obstacles.
In order to make the robot be attracted toward its
goal configuration, while being repulsed from the
obstacles, ∏ is constructed as the sum of two
elementary potential functions:
∏(x) = ∏
A
(x) + ∏
R
(x) (1)
where: ∏
A
(x) is the attractor potential and it is
associated with the goal coordinates and it
isn’t dependent of the obstacle regions.
∏
R
(x) is the repulsive potential and it is
associated with the obstacle regions and it
isn’t dependent of the goal coordinates.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
284
In this case, the force F(t) is a sum of two
components: the attractive force and the repulsive
force:
F(t) = F
A
(t) + F
R
(t) (2)
7.2 Attractor Artificial Potential Field
The artificial potential is a potential function whose
points of minimum are attractors for a controlled
system. It was shown (Takegaki and Arimoto, 1981;
Douskaia, 1998; Masoud, and Masoud, 2000; Tsugi,
Tanaka, Morasso, Sanguineti and Kaneko, 2002, Mohri,
Yang,
and Yamamoto, 1995) that the control of robot
motion to a desired point is possible if the function
has a minimum in the desired point. The attractor
potential ∏
A
can be defined as a functional of
position coordinates x in this mode:
∏
A
(x) =
()
[]
∑
=
+
+−
n
1i
2
iin
2
Tiii
xkxxk
2
1
&
(3)
The function ∏
A
(x) is positive or null and attains
its minimum at x
T
, where ∏
A
(x
T
) = 0. ∏
A
(x) defined
in this mode has good stabilizing characteristics
(Khatib, 1986), since it generates a force F
A
that
converges linearly toward 0 when the robot
coordinates get closer the goal coordinates:
F
A
(x) = k(x – x
T
) (4)
Asymptotic stabilization of the robot can be
achieved by adding dissipative forces proportional to
the velocity
x
&
.
7.3 Repulsive Artificial Potential Field
The main idea underlying the definition of the
repulsive potential is to create a potential barrier
around the obstacle region that cannot be traversed
by the robot trajectory. In addition, it is usually
desirable that the repulsive potential not affect the
motion of the robot when it is sufficiently far away
from obstacles. One way to achieve these constraints
is to define the repulsive potential function as
follows (Latombe, 1991):
⎪
⎩
⎪
⎨
⎧
>
≤
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
=Π
0
0
2
0
R
ddif0
ddif
d
1
d
1
k
2
1
(x)
(x)
(x)
(x)
(5)
where k is a positive coefficient, d(x) denotes the
distance from x to obstacle and d
0
is a positive
constant called distance of influence of the obstacle.
In this case F
R
(x) becomes:
⎪
⎩
⎪
⎨
⎧
>
≤
∂
∂
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
=
0
0
2
0
R
ddif0
ddif
d
d
1
d
1
d
1
k
(x)
(x)
x
(x)
(x)
(x)
(x)F
(6)
For those cases when the obstacle region isn’t a
convex surface we can decompose this region in a
number (N) of convex surfaces (possibly
overlapping) with one repulsive potential associated
with each component obtaining N repulsive
potentials and N repulsive forces. The repulsive
force is the sum of the repulsive forces created by
each potential associated with a sub-region.
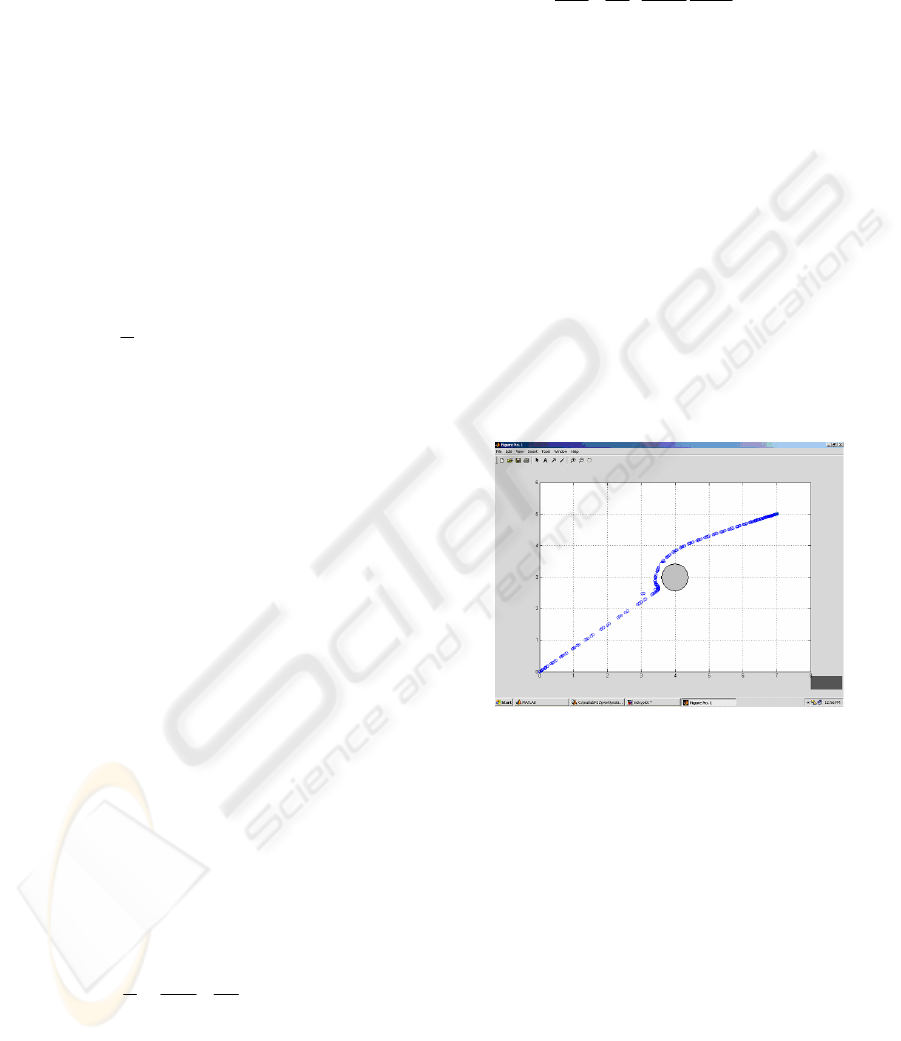
We propose the mobile robot to move from
initial point (x, y) = (0, 0) to final point (x
T
, y
T
) = (7,
5). If any obstacles are not between the two point,
the trajectory is a straight line. If we consider that
there is a dot obstacle, in the point (x
R
, y
R
) = (4, 3),
with
distance of influence d
0
= 0.4, the trajectory is
like in Figure 5.
Figure 5: The constrained robot trajectory by one obstacle.
8 CONCLUSIONS
Most people see robotics as being a vital technology
for providing society with the assistive solutions that
it needs in present and will need in the future. The
purpose of Assistive Technology (AT) is to provide
assistance, without to be a substitution for personal
care, to enable people to lead a better quality of life.
This technology was applied to devices for personal
use created specifically to enhance the physical,
sensory and cognitive abilities of people with
disabilities and to help them function more
independently in environments oblivious to their
needs. People with disabilities are the principal
beneficiaries of the technological growth.
USING ROBOTIC SYSTEMS IN A SMART HOUSE FOR PEOPLE WITH DISABILITIES
285

REFERENCES
Cook, D., Das, S.K., 2007. How smart are our
environments? An updated look at the state of the art.
Journal of Pervasive and Mobile Computing 3:2, pp.
53-73.
Youngblood, G. M., Cook, D. J., Holder L. B., Heierman,
E. O., 2005. Automation intelligence for the smart
environment. In Proceedings of the International Joint
Conference on Artificial Intelligence.
Dewsbury, G., Edge, H.M., 2000. Designing the Home to
Meet the Needs of Tomorrow … Today:
Deconstruting and rebuilding the home for life, ENHR
2000 Gavle, http://www.rgu.ac.uk/subj/search.
Dewsbury, G., Edge, H.M., 2001. Designing the Home to
Meet the Needs of Tomorrow … Today: Smart
technology, health and well-being, Open House
International.
Dewsbury, 2001. THE SOCIAL AND PSYCHOLO-
GICAL ASPECTS OF SMART HOME
TECHNOLOGY WITHIN THE CARE SECTOR,
Published in New Technology In The Human Services,
Vol 14, No 1-2, 2001, pp 9-18, ISSN 0959 0684.
Lupton, D., Seymur, W., 2000. Technology, selfhood and
physical disabilit”, Social Science & Medicine.
50.1852.
Lewis, F. L., 2004. Wireless sensor networks. In D. J.
Cook and S. K. Das, editors, Smart Environments:
Technology, Protocols, and Applications. Wiley,
2004.
Pollack, M. E., 2005. Intelligent technology for an aging
population: The use of AI to assist elders with
cognitive impairment. AI Magazine, 26(2):9–24.
Pineau, J., Montemerlo, M., Pollack, M. Roy, N., and
Thrun, S., 2003. Towards robotic assistants in nursing
homes: Challenges and results. Robotics and
Autonomous Systems, 42(3-4).
Helal, A., Mann, W., El-Zabadani, H., King, J., Kaddoura
Y. and Jansen, E., 2005. The gator tech smart house: A
programmable pervasive space. IEEE Computer,
38(3):50–60.
Kautz, H., Arnstein, L., Borriello, G., Etzioni, O. and Fox.
D. , 2002. An overview of the assisted cognition
project. In Proceedings of the AAAI Workshop on
Automation as Caregiver: The Role of Intelligent
Technology in Elder Care, pages 60–65.
Carter J., and Rosen, M., 1999. Unobtrusive sensing of
activities of daily living: A preliminary report. In
Proceedings of the 1st Joint BMES/EMBS Conference,
page 678.
Mann, W.C. and Bendixen, R.M., 2007. Smart Homes of
the Future, http://www.agingwithdisability.org/PDF
Story M., Mueller J & Mace R, 1998, The Universal
Design File: Designing for people ofall ages and
abilities, The Center for Universal Design, NC State
University.
Gitlin L., 1995. Generations: Journal of the American
Society of Ageing: Why Older People Accept or Reject
Assistive Technology, 19, 1.
Marshal, M., 2000. Astrid: A Social & Technological
Response to Meeting the Needs of Individuals with
Dementia & their Carers, Hawker Publication
,
London.
Dewsbury, G., Edge, H.M, Taylor, B., Designing Safe
Smart Home Systems For Vulnerable People,
Workshop on Dependability in Healthcare Informatics,
22nd-23rd March 2001, pp. 65-70.
Muscato, G. and Longo, D., 2003. CLAWAR WP3
applications – edutainment and service robots,
Proceedings of the 6
th
International Conference on
Climbing and Walking Robots, Vol. 1, Professional
Engineering Publishing Limited, London, UK, 17-19
sept. 2003, pp. 1033-1042.
Stoian, V., Bizdoaca, N.G., Pana, C., "Edutainment and
Robotics - a Great Relationship", Proceedings of the
17-th International Annual Conference on Innovation
in Education for Electrical and Information
Engineering (EAEEIE 2006), Craiova, Romania, June
1
st
-3
rd
, 2006, vol. I, pp. 93-98, ISBN: (10) 973-742-
350-X, (13) 978-973-742-350-4.
Virk, G.S., 2002. Clawar Network and its Role for
Advanced Robotics Dissemination”, Proceedings of
the CLAWAR Workshop: The role of CLAVAR in
education, training, working conditions and safety,
Madrid, Spain.
Edge, H.M., Taylor B., Dewsbury, G., Groves, M., 2000.
The Potential for ‘Smart Home Systems in Meeting
the Care Needs of Older Persons and People with
Disabilities, Seniors Housing Update, vol. 10. no. 1, 6-
8.
Khatib., O, 1986. Real-time Obstacle Avoidance for
Manipulators and Mobile Robots. Int. J. Robot. Res.,
vol. 5, no. 1, pp. 90-98.
Takegaki, M. and S. Arimoto, 1981. A new feedback
methods for dynamic control of manipulators. Journal
of Dynamic Systems, Measurement and Control, pp.
119-125.
Douskaia, N.V., 1998. Artificial potential method for
control of constrained robot motion. IEEE Trans. On
Systems, Man and Cybernetics, part B, 28, pp. 447-
453.
Masoud, S.A., A.A. Masoud, 2000. Constrained motion
control using vector potential fields, IEEE Trans. On
Systems, Man and Cybernetics, part A, 30, pp. 251-
272.
Tsugi, T., Y. Tanaka, P.G. Morasso, V. Sanguineti and M.
Kaneko, 2002. Bio-mimetic trajectory generation of
robots via artificial potential field with time base
generator. IEEE Trans. On Systems, Man and
Cybernetics, part C, 32, pp. 426-439.
Mohri, A, Yang, X. D. and Yamamoto, 1995. A Collision
free trajectory planning for manipulator using potential
function”, Proceedings 1995 IEEE International
Conference on Robotics and Automation (ICRA95),
pp. 3069-3074.
Latombe J.C., 1991. Robot Motion Planning, Kluwer
Academic Publishers, Boston.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
286
