
ROBOTIC SOCCER: THE GATEWAY FOR POWERFUL
ROBOTIC APPLICATIONS
Luiz A. Celiberto Junior and Jackson P. Matsuura
Instituto Tecnológico de Aeronáutica (ITA)
Praça Marechal Eduardo Gomes, 50, Vila das Acácias, 12228-900, São José dos Campos, SP, Brazil
Keywords: Robotics, Robotic Soccer, Artificial Intelligence, Image Processing, Intelligent Agents.
Abstract: From the RoboCup goal of having a fully autonomous humanoid soccer team, it is possible to see many
applications of the research in the Humanoid Soccer, such as the development of mechanical legs and arms
and exoskeletons. The onboard vision algorithms for multi target tracking and the cooperative decision
making of some Soccer Leagues can be used in squadrons of autonomous vehicles in a variety of missions.
The algorithms for image processing of the Small Size League can be used in aerial or satellite images to
track vehicles. The Simulation League allows the development of many intelligent agents applications. The
formations and team play positioning of the Simulation League can be used to optimize the positioning of a
squadron of autonomous vehicles. The research of Robotic Soccer fosters and strengthens the research in
Robotics, allowing and contributing to the development of many powerful applications which can great
benefit the mankind.
1 INTRODUCTION
The RoboCup initiative is an attempt to foster AI
and intelligent robotics research by providing a
standard problem where a wide range of
technologies can be integrated and examined.
RoboCup chose to use soccer game as a central topic
of research, aiming at innovations to be applied for
socially significant problems and industries. The
ultimate goal of the RoboCup project is by 2050,
develop a team of fully autonomous humanoid
robots that can win against the human world
champion team in soccer (The RoboCup Federation,
2007).
Although clearly stated by RoboCup that in or-
der for a robot team to actually perform a soccer
game, various technologies must be incorporated
including: design principles of autonomous agents,
multi-agent collaboration, strategy acquisition, real-
time reasoning, robotics, and sensor-fusion (Ro-
boCup, 2007), some people do not understand why
RoboCup choose the soccer and not another robotic
application with real and direct benefits to the man-
kind as its central topic of research. Some robotics
researches even do not recognize the Robotic Soccer
research as a serious one. And even among Ro-
boCup researches there is some which are so con-
centrated in developing competitive Soccer Teams
that do not really realize the real potential of their
research in Robotic Soccer.
With the introduction of the RoboCup Rescue
and RoboCup Leagues, part of the research for Ro-
boCup Competitions can be direct and immediately
applied to some robotic applications, but the re-
search in Robotic Soccer may also foster the re-
search in more advanced and specific topics which
lead to great advances in Robotics, both in hardware
and software.
The objective of this work is to show some of
the many relevant and important applications which
can be derived directly or indirectly from the re-
search in Robot Soccer.
Starting from the main RoboCup goal of having
a fully autonomous humanoid soccer team, it is pos-
sible to see many direct applications of the research
in the Humanoid Soccer League, such as the devel-
opment of mechanical robotic legs and arms for the
cripple and exoskeletons for paralytic. The onboard
computer vision algorithms for multi target tracking
and the cooperative decision making of Humanoid,
Middle Size and Four Legged Soccer Leagues can
be used by squadrons of sea, ground or aerial un-
287
A. Celiberto Junior L. and P. Matsuura J. (2008).
ROBOTIC SOCCER: THE GATEWAY FOR POWERFUL ROBOTIC APPLICATIONS.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics, pages 287-293
DOI: 10.5220/0001503202870293
Copyright
c
SciTePress

manned vehicles in search-and-rescue, surveillance,
recognition or even attack missions. The algorithms
applied in the image processing of the Small Size
League for image segmentation and multiple target-
ing of fast moving objects can be used in aerial or
satellite images to track vehicles or boats and even
aircrafts and isolate each target and its velocity and
attitude. Finally even the Simulation League re-
search is very important and besides helping the
development of algorithms for the other Leagues,
can allow many intelligent agents applications to be
developed in many areas. In conjunction with the
multi target algorithms and cooperative decision
making algorithms developed in other RoboCup
Leagues the defensive and offensive formations and
team play positioning of the Simulation League can
be used to optimize the group positioning and area
coverage of a squadron of unmanned autonomous
vehicles.
Some research topics of the RoboCup Soccer
Leagues are presented in the next section and in sec-
tion 3 the relations among the research in the Ro-
boCup Soccer Leagues and powerful real world ap-
plications are explained in detail, leading to the con-
clusion that the research of Robotic Soccer in the
various RoboCup Soccer Leagues foster and
strengthen the research in Robotics, allowing and
contributing to the development of many powerful
hardware and software which can great benefit the
mankind.
2 ROBOCUP SOCCER LEAGUES
AND SUB LEAGUES
The RoboCup Soccer Competition has a total of five
senior Leagues, some with Sub Leagues, but for our
purpose we should consider only four different
approaches for Robotic Soccer Research. The first of
these four approaches to be considered is the
Humanoid Soccer League, were anthropomorphic
autonomous robots must be developed to play
soccer, perform penalty kicks and accomplish some
technical challenges related with soccer playing
skills. The second embodies the Four Legged and
the Middle Size Soccer Leagues were autonomous
robots must coordinate their actions to play a soccer
game. The third approach is the Small Size Soccer
League, where a unique program controls an entire
team of robots using the information provided by a
camera that has a satellite like view of the entire
field of play, including all robots, field marks and
the ball. The fourth and last approach is the
Simulation League where team play algorithms must
be developed to autonomous intelligent agents play
soccer coordinating their efforts.
2.1 Humanoid Soccer
In the RoboCup Humanoid Soccer League, autono-
mous robots with a human-like body plan and hu-
man-like senses play soccer against each other. In
addition to soccer games, penalty kick competitions
and technical challenges take place. Dynamic walk-
ing, running, and kicking the ball while maintaining
balance, visual perception of the ball, other players,
and the field, self-localization and team play are
among the many research issues investigated in the
Humanoid League (RoboCup Humanoid League,
2007). Figure 1 shows some of the Humanoid Ro-
bots which participated in the RoboCup 2006 at
Bremen.
Figure 1: Robots of the Humanoid Soccer League at the
RoboCup Championship - Bremen2006.
To ensure that the humanoid robots perform
well all these activities a wide range of technology
must be researched and adapted. Some of the re-
search topics in the RoboCup Humanoid League are:
• The design and assembly of anthropomorphic
robots;
• The development of optimal and robust con-
trol algorithms that optimize the speed of the move-
ments keeping a robust stability of the robots;
• The development of real time image process-
ing algorithms, capable of tracking moving objects
and even anticipates actions of adversary robots;
• The development of team play algorithms
that allow the coordination of the robots actions ac-
cording with the state of the game.
Some RoboCup teams fully design and assem-
bly their robots (Santos et al, 2006), (Behnke, S. et
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
288

al, 2006), while other augment some commercial
robots and there is even Robotic Companies which
adapt their robots to test their capabilities in the
Humanoid League (Faconti, 2006).
2.2 Autonomous Multi-Agent Soccer
For our purpose of establish the relations of the
research in the RoboCup Soccer Leagues and real
world applications the Four-Legged and the Middle
Size RoboCup Leagues can be explored together. In
the Four-Legged League teams consisting of four
Sony Aibo robots each play on a field of 6 m x 4 m.
The robots operate fully autonomously, i.e. there is
no external control, neither by humans nor by com-
puters (Four-Leegged, 2006). In the Middle Size
League two teams of mid-sized robots with all sen-
sors on-board play soccer on a field; relevant objects
are distinguished by colors; communication among
robots (if any) is supported on wireless communica-
tions and no external intervention by humans is al-
lowed, except to insert or remove robots in/from the
field (RoboCup2004 Middle Size League, 2007).
The great difference among these two leagues is
the hardware. In the Four-Legged League, all teams
are limited to the Sony Aibo robot, while in the
Middle Size the teams have the freedom to design
and build their robots according to some dimensions
and weight limitations. But both leagues have some
research challenges in common, which are also Hu-
manoid Soccer challenges:
• The development of real time image process-
ing algorithms, capable of tracking moving objects
and even anticipates actions of adversary robots;
• The development of team play algorithms
that allow the coordination of the robots actions ac-
cording with the state of the game.
But as the concern about stable biped walking
doesn’t exist and the design of the robots is easier or
also nonexistent in these leagues and usually the
processor power of the Aibos and mainly of the
Middle Size Robots are far better than the humanoid
ones, more advanced and complex techniques can be
developed and applied in these two leagues. Such
techniques can latter be used by the humanoid robots
when their processor power reach better standards.
2.3 Small Size League
The Small Size Soccer League focuses on the prob-
lem of intelligent multi-agent cooperation and con-
trol in a highly dynamic environment with a hybrid
centralized/distributed system. A Small Size robot
soccer game takes place between two teams of five
robots each.
Although local on-board vision sensors are
permitted, most teams use a global vision system,
where an overhead camera and an off-field PC are
used to identify and track the robots. The off-field
PC also performs most of the processing required for
coordination and control of the robots (Small Size
Robot League, 2007). Figure 2 shows the structure
of the control loop for the robots using the global
vision system and Figure 3 shows a typical image
acquired by the overhead camera.
Fast moving multi-target tracking and multi-
robot coordination are some of the big research chal-
lenges in the Small Size Soccer League.
Figure 2: Control Loop Structure for the Global Vision
System.
Figure 3: Typical Small Size image (Manzuri-Shalmani et
al, 2006).
2.4 Soccer Simulation League
The RoboCup Soccer Simulation League have two
main objectives, the first is to develop a simulation
environment where it is possible to research the
software aspects of RoboCup, allowing a fast
development of new techniques and algorithms. The
second is to present by itself a challenge multi-agent
problem, for that it enables for two teams of 11
ROBOTIC SOCCER: THE GATEWAY FOR POWERFUL ROBOTIC APPLICATIONS
289
simulated autonomous robotic players to play soccer
(The RoboCup Soccer Simulation, 2006) .
So, the main challenge in the Soccer Simulation
League is to develop efficient team play algorithms
for autonomous intelligent agents. The offensive and
defensive formations of the players are one of the
researches topics associated with this challenge.
3 REAL WORLD APPLICATIONS
RoboCup not only create student and media interest
in the research of Robotics (Brãun, 1999) and
RoboCup Soccer Competitions are not limited to just
make students to work in practical solutions. The
research in the Robotic soccer teams should allow a
great advance in the Robotics field and besides the
most obvious applications of the RoboCup research
being of military or space exploration use (Kitano et
al, 1998) the methods, techniques and algorithms
developed to make robots play soccer can be used in
many real world applications which can benefit all
the mankind.
To start understand the extension and potential of
the research in Robotic Soccer it is easier to imagine
that the main RoboCup objective of develop a team
of fully autonomous humanoid robots that can win
against the human world champion team in soccer
was achieved. The year is 2050 and the RoboCup
humanoid team is able to win against the human
soccer world champion team. What more these
robots should do? What more should be done with
the technology used in these robots?
From the electromechanical point of view,
having such humanoid soccer players will help many
cripple and paralytic people. Using the same
technology and components used to assembly the
soccer robots it will be possible to assembly
mechanical legs and arms so or more efficient than
the humans members. Also, the same algorithms
used in the robots to walk, run, jump, kick and pick
a ball should be used to control these robotic
prosthesis. With some changes the robotics
prosthesis can be turned in orthosis and even full
body exoskeletons can be assembled.
The vision algorithms and the cameras should be
used to help blind people and to monitor everything.
The robots will be able to accurate track the ball, all
the teammates and adversaries and all the field
landmarks. If the image processing techniques used
in the robots should do that the will also be able to
guide blind people in a crowded metropolis. The
vision processing will be able to tell when an obsta-
cle is approaching, the best way to avoid a collision
and even anticipate movements of other people. But
we do not need to wait until 2050 to see some of the
powerful applications that can be derived direct or
indirect from Robotic Soccer.
3.1 Humanoid Research, Prosthesis,
Orthosis and Exoskeletons
Although not all direct related with Robotic Soccer
much researches are already being done and some
important results are already being obtained with
robotic prosthesis, orthosis and Exoskeletons.
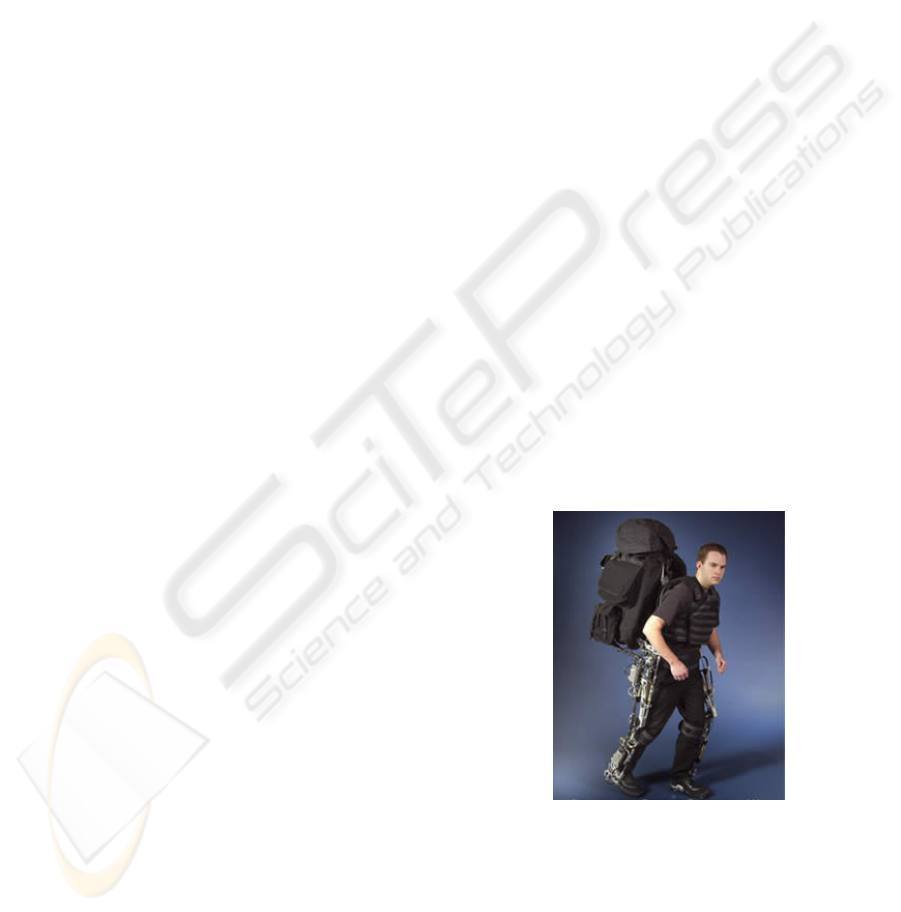
It is true that one of the main usages of exo-
skeletons or lower part exoskeletons (Chu;
Kazerooni; Zoss, 2005), (Low et al, 2006) is the
enhancement of human soldiers, improving their
endurance, speed and load carrying ability, but there
are also other uses for them. Figure 4 shows the
BLEEX (Berkeley Lower Extremity Exoskeleton).
Exoskeletons may be used by paralytic people to
perform all actions that any another people should
do. Construction workers, miners, firefighters and
rescue agents should also use exoskeletons to do
their jobs more safely and efficiently. In the case of
firefighters and rescue agents and exoskeleton may
be the difference for saving an human life.
Exoskeletons or orthosis, like ankle-foot orthosis
(Agrawal, 2005), (Ferris, 2005) may also be used in
the rehabilitation of patients and help in physiother-
apy.
Figure 4: The Berkeley Lower Extremity Exoskeleton -
BLEEX.
In the research directed related with humanoid
soccer robots one should cite the use of reinforce-
ment learning for humanoid robots (Latzke; Behnke;
Bennewitz, 2007) and studies of dynamic stabiliza-
tion techniques for humanoid robots (Renner;
Behnke, 2006). Both research topics are very im-
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
290

portant to have humanoid robots capable to adapt
themselves to adverse conditions.
3.2 Image Processing,
Self-Localization, Sensor Fusion
Two common problems in most Soccer Leagues are
the image processing and the coordination of multi-
robots. The solutions for both problems can be ap-
plied in a wide range of robotic and even just moni-
toring applications. Recognizing and tracking ob-
jects and using images for self-locating are general
image processing research topics and are not limited
to the Robotic Soccer.
Algorithms used to track a moving ball and
predict changes in its movements due to contact with
robots (Li; Zell, 2007) can be used to track vehicles
in a road or the trajectory of any moving object,
anticipating possible collisions. Algorithms
developed to differentiate opponent robots from
teammate robots (Lange; Riedmiller, 2007) can be
used in traffic cameras to easy identity a suspect or
robed car and in military operations in armored
vehicles and aircrafts to avoid friendly fire.
Although some tracking and localization
algorithms used in the RoboCup Soccer Leagues still
relays on colored artificial landmarks (Iocchi, 2007)
there is already research in the Four Legged League
for self localization of the robots based on field
features and not in colors (Herrero-Pérez, 2007).
These algorithms can be use in any kind of
unmanned vehicles to detect features in the terrain
around it and self locating its position. They can also
be used in conjunction with terrain data bases for
better localization.
In the RoboCup Soccer Leagues there are also
researches in fusion the visual information of the
robots for better ball and robot localization on the
field (Nisticó et al, 2007). These sensor fusion
algorithms and techniques can be extended to sensor
fusion and movement coordination in the target
tracking of a squadron of unmanned vehicles
(Ludington, 2006) the target should be a fugitive, a
suspicious car, an airplane or even a spaceship or
rocket which must be followed with precision.
3.3 Global Image Processing, Team
Coordination
The Global Vision System of the RoboCup Small
Size Soccer is very similar to the satellite imaging
and surveillance aircraft image systems, where the
images is collected from a point high above the
ground, resulting in a practically 2D image. The
image processing algorithms used in the Small Size
Soccer League to track multiple fast moving objects
can be used in satellite tracking and with aerial
video. Figure 5 shows a unmanned aircraft vehicle
with its camera field of view and a sample image.
Figure 5: UAV camera field of view (left) and sample
image (right) (Arrambel et al, 2004).
There are also research in RoboCup to autono-
mous extract relevant information from robot marks
and used this information to anticipate robots actions
(Umemura, 2007). The same algorithms can be used
to extract relevant information from any moving
target and also anticipate its movements.
Bruce and Veloso (Bruce; Veloso, 2007)
extended a motion planning algorithm primary
developed and used in the Small Size Soccer robot
navigation to an unmanned aircraft vehicle.
The Team coordination algorithms of the Small
Size League and of the Simulation League can be
used for teams of ground, sea or aerial unmanned
vehicles. Search and Rescue, Patrol, Surveillance,
and Escort Missions among others will need team
coordination. If an off-field computer has the global
view of the field of interest the Small Size decision
Algorithms should be used, but if each vehicle has to
take its own decision on coordinating efforts the
Soccer Simulation algorithms and team positioning
strategies should be used.
A good example for the use of the team
positioning and team coordinating algorithms are the
ROBOTIC SOCCER: THE GATEWAY FOR POWERFUL ROBOTIC APPLICATIONS
291

search for missing people. A Squadron of UAVs
must cover a wide forest area searching for missing
tourists. A defensive positioning for covering a wide
area without blanks like the one used in Soccer
Simulation to block passes should be assumed by the
UAVs squadron. Also, when one of the UAVs
leaves the formation to see an area of interest the
others UAVs should close the formation to cover the
space left, like to close a defensive formation when
one player is not available for the defensive action.
Multi-agent coordination techniques can also be
applied in Air Traffic Management to ensure safer
and more efficient operation of civilian aircrafts
(Nguyen-Duc, 2003). And finally the Soccer Simu-
lation league should be used to explore many intelli-
gent agent cooperation techniques, which should be
used in any of the Intelligent Agent applications
fields, like Process Control, Manufacturing, Air
Traffic Control, Information Management, Elec-
tronic Commerce, Business Process Management,
Patient Monitoring, Health Care, Games or Interac-
tive Theater and Cinema (Jennings; Wooldridge,
1998).
4 CONCLUSIONS
The RoboCup Soccer Competition is more than just
an attractive for students and media and more than
one place to test hardware and software outside the
laboratories. The research done to create fully
autonomous soccer robots can really be applied in
many useful robotics applications and allow and
foster the development of even more powerful and
important applications to the mankind.
From prosthesis and orthosis to cripple, passing
to image processing algorithms which can save lives
and arriving in multi-agent cooperation algorithms
and decision making which will optimize the actions
of squadrons or even swarms of robots or intelligent
agents, the researches in Robotic Soccer can really
allow and foster the development of powerful ro-
botic applications.
REFERENCES
The RoboCup Federation, 2007. http://www.robocup.org
(2007). RoboCup Humanoid League. http://
www.humanoidsoccer.org/.
Santos, V. et al. RoboCup 2006, 2006. Humanoid League:
UA Team Description. In Proceedings of the RoboCup
2006 Symposium CDROM, TDP .
Behnke, S. et al, 2006. NimbRo KidSize 2006 Team
Description. In Proceedings of the RoboCup 2006
Symposium CDROM, TDP.
Faconti, D. et al, 2006. Technical description: Pal
Technology. In Proceedings of the RoboCup 2006
Symposium CDROM, TDP.
Four-Legged League, 2007
http://www.tzi.de/4legged/bin/view/Website/WebHome
RoboCup2004 Middle Size League, 2007
http://www.er.ams.eng.osaka-u.ac.jp/rc2004msl/.
Small Size Robot League, 2007 http://small-
size.informatik.uni-bremen.de/.
Manzuri-Shalmani, M. T. et al, 2006. Team Description
Paper of the Robo-Cup Small-Size League 2005 Sharif
CESR. In Proceedings of the RoboCup 2006
Symposium CDROM, TDP.
The RoboCup Soccer Simulator, 2007.
http://sserver.sourceforge.net/.
Bräunl, T. Research Relevance of Mobile Robot
Competitions, 1999. IEEE Robotics and Automation
Magazine, v. 6, n. 4 32-37.
Kitano, H. et al. RoboCup: Robot World Cup, 1998. IEEE
Robotics and Automation Magazine, v. 5, n. 3 30-36.
Chu, A., Kazerooni, H., Zoss, A, 2005. On the Biomimetic
Design of the Berkeley Lower Extremity Exoskeleton
(BLEEX). In Proceedings of the 2005 IEEE
International Conference on Robotics and Automation
- ICRA 2005 4345- 4352.
Low, K. H. et al, 2006. Locomotive Control of a Wearable
Lower Exoskeleton for Walking Enhancement.
Journal of Vibration and Control, v. 12, n. 12 1311-
1336.
Agrawal, A. et al, 2005. Design of a Two Degree-of-
freedom Ankle-Foot Orthosis for Robotic
Rehabilitation. In Proceedings of the 9th International
Conference on Rehabilitation Robotics - ICORR 2005
41- 44.
Ferris, D.P., Czerniecki, J.M., Hannaford, B., 2005. An
ankle-foot orthosis powered by artificial pneumatic
muscles. Journal of Applied Biomechanics, v. 21 189-
197.
Latzke, T., Behnke, S., Bennewitz, M. Imitative, 2007.
Reinforcement Learning for Soccer Playing Robots.
RoboCup 2006: Robot Soccer World Cup X, Lecture
Notes in Artificial Intelligence, Springer Verlag,
Berlin . To Appear.
Renner, R., Behnke, S., 2006. Instability Detection and
Fall Avoidance for a Humanoid using Attitude Sensors
and Reflexes. In Proceedings of the IEEE/RSJ
International Conference on Intelligent Robots and
Systems 2967-2973.
Li, X., Zell, A. H., 2007. Filtering for a Móbile Robot
Tracking a Free Rolling Ball. RoboCup 2006: Robot
Soccer World Cup X, Lecture Notes in Artificial
Intelligence, Springer Verlag, Berlin. To Appear.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
292

Lange, S., Riedmiller, M., 2006. Appearance-Based Robot
Discrimination using Eigenimages. RoboCup 2006:
Robot Soccer World Cup X, Lecture Notes in
Artificial Intelligence, Springer Verlag, Berlin. To
Appear.
Iocchi, L., 2007 Robust Color Segmentation through
Adaptive Color Distribution Transformation.
RoboCup 2006: Robot Soccer World Cup X, Lecture
Notes in Artificial Intelligence, Springer Verlag,
Berlin. To Appear.
Herrero-Pérez, D., Martínez-Barberá, H., 2007 Robust and
Efficient Field Features Detection for Localization.
RoboCup 2006: Robot Soccer World Cup X, Lecture
Notes in Artificial Intelligence, Springer Verlag,
Berlin. To Appear.
Nisticó, W. et al., 2007 Cooperative Visual Tracking in a
Team of Autonomous Mobile Robots. RoboCup 2006:
Robot Soccer World Cup X, Lecture Notes in
Artificial Intelligence, Springer Verlag, Berlin. To
Appear.
Ludington, B. et al., 2006. Target Tracking with
Unmanned Aerial Vehicles: From Single to Swarm
Vehicle Autonomy and Intelligence. In Proceedings of
the 14th Mediterranean Conference on Control and
Automation 1-6.
Arambel, P. et al., 2004. A Multiple-Hypothesis Tracking
of Multiple Ground Targets from Aerial Video with
Dynamic Sensor Control. In Proceedings of the 7th
International Conference on Information Fusion 1080-
1087.
Umemura, S.; Murakami, K. and Naruse, T., 2006.
Orientation Extraction and Identification of the
Opponent Robots in RoboCup Small-Size League.
RoboCup 2006: Robot Soccer World Cup X, Lecture
Notes in Artificial Intelligence, Springer Verlag,
Berlin. To Appear.
Bruce, J. and Veloso, M., 2007. Real-Time Randomized
Motion Planning for Multiple Domains. RoboCup
2006: Robot Soccer World Cup X, Lecture Notes in
Artificial Intelligence, Springer Verlag, Berlin. To
Appear.
Nguyen-Duc, M., Briot, J.-P., Drogoul, A., 2003 An
application of Multi-Agent Coordination Techniques
in Air Traffic Management. In Proceedings of the
IEEE/WIC International Conference on Intelligent
Agent Technology 622-265.
Jennings N. and M .Wooldridge M., 1998 Agent
Technologies: Foundations, Applications and Markets.
Springer.
ROBOTIC SOCCER: THE GATEWAY FOR POWERFUL ROBOTIC APPLICATIONS
293
