IMPLEMENTATION OF A HOMOGRAPHY-BASED VISUAL SERVO
CONTROL USING A QUATERNION FORMULATION
T. Koenig and G. N. De Souza
ViGIR Laboratory, University of Missouri, 349 Eng. Building West, Columbia-MO, U.S.A.
Keywords:
Image-base servo, visual servoing, quaternion.
Abstract: In this paper, we present the implementation of a homography-based visual servo controller as introduced in
(Hu et al., 2006). In contrast to other visual servo controllers, this formulation uses a quaternion representation
of the rotation. By doing so, potential singularities introduced by the rotational matrix representation can be
avoided, which is usually a very desirable property in, for example, aerospace applications such as for visual
control of satellites, helicopters, etc.
The movement of the camera and the image processing were performed using a simulation of the real envi-
ronment. This testing environment was developed in Matlab-Simulink and it allowed us to test the controller
regardeless of the mechanism in which the camera was moved and the underlying controller that was needed
for this movement. The final controller was tested using yet another simulation program provided by Kawasaki
Japan for the UX150 industrial robot. The setup for testing and the results of the simulations are presented in
this paper.
1 INTRODUCTION
Any control system using visual-sensory feedback
loops falls into one of four categories. These cate-
gories, or approaches to visual servoing, are derived
from choices made regarding two criterias: the coor-
dinate space of the error function, and the hierarchical
structure of the control system. These choices will de-
termine whether the system is a position-based or an
image-based system, as well as if it is a dynamic look-
and-move or a direct visual servo (Hutchinson et al.,
1996).
For various reasons includingsimplicity of design,
most systems developed to date fall into the position-
based, dynamic look-and-move category (DeSouza
and Kak, 2004). In this paper however, we describe
an image-based, dynamic look-and-move visual ser-
voing system. Another difference between our ap-
proach and other more popular choices in the litera-
ture is in the use of a quaternion representation, which
eliminates the potential singularities introduced by a
rotational matrix representation (Hu et al., 2006).
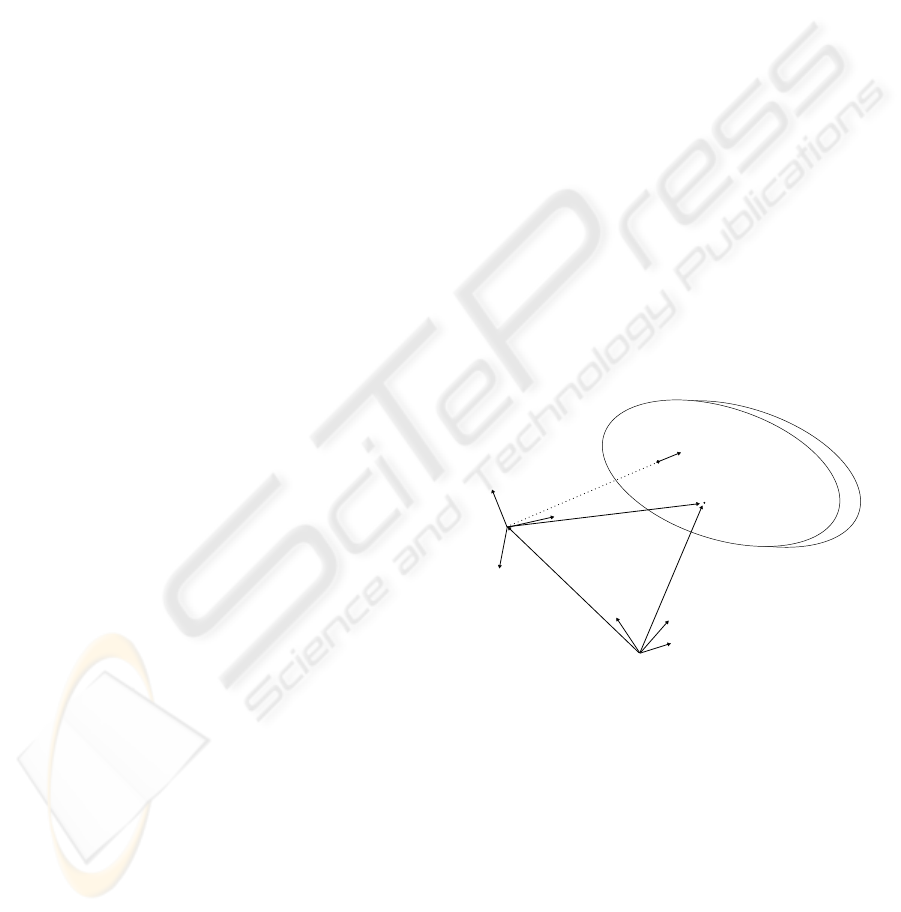
We based the development of our controller on the
ideas introduced in (Hu et al., 2006), which requires
the assumption that a target object has four coplanar
and non-colinear feature points denoted by O
i
, where
i = 1. . . 4. The plane defined by those 4 feature points
Π
∗
F
F
∗
d
∗
n
◦
R
∗
,
◦
t
∗
◦
¯m
i
∗
¯m
i
O
i
Figure 1: Relationships between the frames and the plane.
is denoted by Π. Moreover, two coordinate frames
must be defined: F (t) and
∗
F , where F (t) is af-
fixed to the moving camera and
∗
F represents the
desired position of the camera. Figure 1 depicts the
aboveconcepts as well as the vectors
◦
¯m
i
(t),
∗
¯m
i
∈ R
3
representing the position of each of the four feature
points with respect to the corresponding coordinate
frames. That is:
◦
¯m
i
= [
◦
x
i
◦
y
i
◦
z
i
]
T
i = 1. . . 4 (1)
∗
¯m
i
= [
∗
x
i
∗
y
i
∗
z
i
]
T
i = 1. . . 4 (2)
The relationship between these two sets of vectors can
288
Koenig T. and N. De Souza G. (2008).
IMPLEMENTATION OF A HOMOGRAPHY-BASED VISUAL SERVO CONTROL USING A QUATERNION FORMULATION.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - RA, pages 288-294
DOI: 10.5220/0001503402880294
Copyright
c
SciTePress

be expressed as
◦
¯m
i
=
◦
t
∗
+
◦
R
∗
∗
¯m
i
(3)
where
◦
t
∗
(t) is the translation between the two
frames, and
◦
R
∗
(t) is the rotation matrix which brings
∗
F onto F .
Intuitively, the control objective can be regarded
as the task of moving the robot so that
◦
¯m
i
(t) equals
∗
¯m
i
∀i as t → inf. However, an image-based vi-
sual servoing system is not expected to calculate the
real coordinates of these feature points. Instead, it
can only extract the image coordinates of those same
points. That is, the coordinates
◦
p
i
and
∗
p
i
of the
projection of the feature points onto the image plane,
given by:
◦
p
i
= A
◦
m
i
and
∗
p
i
= A
∗
m
i
, where A is the
matrix of the intrinsic parameters of the camera. So,
the real control objective becomes that of moving the
robot so that
◦
p
i
equals
∗
p
i
.
This idea will be further detailed in the following
section.
2 DESIGN OF THE
CONTROLLER
As mentioned above, the control objective is to reg-
ulate the camera to a desired position relative to the
target object. In order to achieve this control objective
the image coordinates at the desired position have to
be known. This can be done by taking an image of the
target object at the desired position and extracting the
feature points using an image processing algorithm.
Once a picture is taken and the image coordinates are
extracted, those coordinates can be stored for future
reference. It is assumed that the motion of the cam-
era is unconstrained and the linear and angular veloc-
ities of the camera can be controlled independently.
Furthermore the camera has to be calibrated, i.e. the
intrinsic parameters of the camera A must be known.
As we mentioned earlier, in the Euclidean space
the control objective can be expressed as:
◦
R
∗
(t) → I
3
as t → inf (4)
||
◦
t
∗
(t)|| → 0 as t → inf (5)
and the translation regulation error e(t) ∈ R
3
can be
defined using the extended normalized coordinates as:
e =
◦
m
e
−
∗
m
e
=
◦
x
i
◦
z
i
−
∗
x
i
∗
z
i
◦
y
i
◦
z
i
−
∗
y
i
∗
z
i
ln
◦
z
i
∗
z
i
T
(6)
The translation regulation objective can then be quan-
tified as the desire to regulate e(t) in the sense that
||e(t)|| → 0 as t → inf . (7)
It can be easily verified that if (7) is satisfied, the ex-
tended normalized coordinates will approach the de-
sired extended normalized coordinates, i.e.
◦
m
i
(t) →
∗
m
i
(t) and
◦
z
i
(t) →
∗
z
i
(t) (8)
as t → inf. Moreover, if (7) and (8) are satisfied,
(5) is also satisfied.
Similarly, the rotation regulation objective in (4)
can be expressed in terms of its quaternion vector q =
[q
0
˜q ]
T
, ˜q = [q
1
q
2
q
3
]
T
(Chou and Kamel, 1991)
by:
|| ˜q(t)|| → 0 as t → inf . (9)
In that case, if (7) and (9) are satisfied, the control
objective stated in (4) is also satisfied.
For such translational and rotational control ob-
jectives, it was shown in (Hu et al., 2006) that the
closed-loop error system is given by:
˙q
0
=
1
2
˜q
T
K
ω
I
3
− ˜q
×
−1
˜q (10)
˙
˜q = −
1
2
K
ω
q
0
I
3
− ˜q
×
I
3
− ˜q
×
−1
˜q (11)
∗
z
i
˙e = −K
v
e+ ˜z
i
L
ω
ω
c
(12)
and the control inputs by:
ω
c
= −K
ω
I
3
− ˜q
×
−1
˜q (13)
v
c
=
1
α
i
L
−1
v
(K
v
e+
∗
ˆz
i
L
ω
ω
c
) (14)
where
∗
ˆz
i
= e
T
L
ω
ω
c
is an estimation for the unknown
∗
z
i
; ˜q
×
is the anti-symmetric matrix representation
of the vector ˜q; L
v
, L
ω
are the linear and angular
Jacobian-like matrices; K
ω
, K
v
∈ R
3×3
are diagonal
matrices of positive constant control gains; and the
estimation error ˜z(t) ∈ R is defined as ˜z
i
=
∗
z
i
−
∗
ˆz
i
.
A proof of stability for the controller above can be
found in (Hu et al., 2006).
3 IMPLEMENTATION
In this work the task of controlling a robot with a
visual-servoing algorithm was divided into four ma-
jor parts:
1. Capturing images using a video camera.
2. Processing the images to get the coordinates of the
feature points.
3. Calculating the input variables, i.e. the velocities
of the robot endeffector.
4. Moving the robot according to the given input
variables.
IMPLEMENTATION OF A HOMOGRAPHY-BASED VISUAL SERVO CONTROL USING A QUATERNION
FORMULATION
289
discrete and noise
discrete and noise
discrete and noise
discrete and noise
[CurrentFrame]
[CurrentFrame]
csfcn camera
CameraPose
simulate Frame
HTM to XYZOAT
X
Y
Z
O
A
T
[p1]
[p1]
[p2]
[p2]
[p3]
[p3]
[p4]
[p4]
[u]
[u]
csfcn
controller
msfcn
frame htm
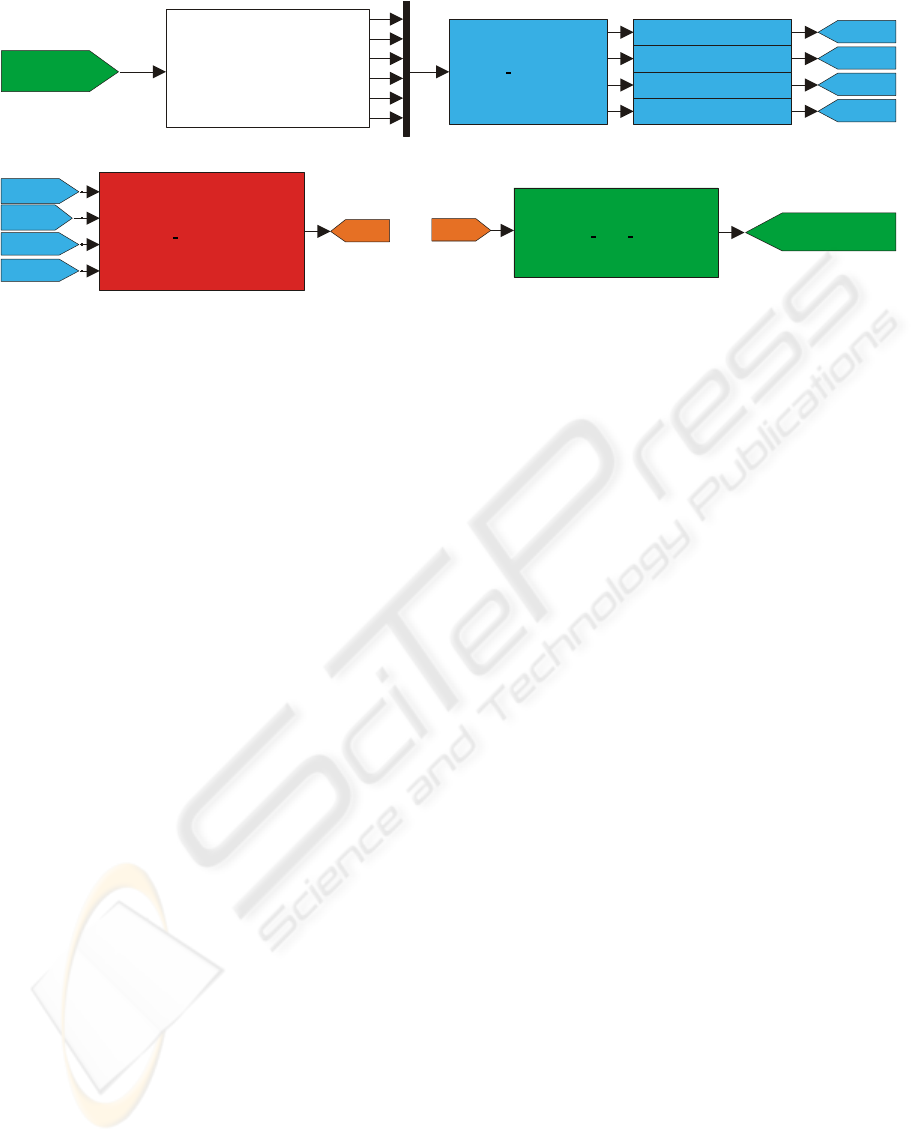
Figure 2: The Simulink-Model.
The hardware available for this task consisted of a
Kawasaki industrial robot with a camera mounted on
its endeffector and vision-sensor network for captur-
ing and processing images from the camera.
The controller was implemented as a C++ class, in
order to guarantee the future reusablility of the code
in different scenarios (as it will be better explained be-
low). Initially, the controller requires the camera in-
trinsic parameters and the desired image coordinates
of the four feature points. Next it extracts the cur-
rent image coordinates and then it calculates the lin-
ear and angular velocities of the endeffector, i. e. the
input variables of the controller.
In order to safely test the controller, the real pair
robot/camera was replaced by two different simula-
tors. The first simulator, which was implemented in
MATLABSIMULINK, simulates an arbitrary motion of
the camera in space. The camera is represented by a
coordinate frame as it is briefly described later. With
this simulator it is possible to move the camera ac-
cording to the exact given velocities.
In all testing scenarios performed, the camera sim-
ulator needed to output realistic image coordinates of
the feature points. To achieve that, the simulator re-
lied on a very accurate calibration procedure (Hirsh
et al., 2001) as well as exact coordinates of the feature
points in space with respect to the camera. Given that,
the simulator could then return the image coordinates
of the feature points at each time instantt. The camera
simulator was also implemented as a C++ class.
The second simulator is a program provided by
Kawasaki Japan. This simulator can execute the ex-
act same software as the real robot and therefore it
allowed for the testing of the code used to move the
real robot. This code is responsible for performing
the forward and inverse kinematics, as well as the dy-
namics of the robot.
The basic structure of the simulink model can be
seen in Figure 2.
In this work, we will not report the resultis from
the tests with the real robot. So, in order to demon-
strate the system in a more realistic setting, noise was
added to the image processing algorithm and a time
discretization of the image acquisition was introduced
to simulate the camera.
3.1 Describing the Pose and Velocity of
Objects
The position and orientation (pose) of a rigid ob-
ject in space can be described by the pose of an at-
tached coordinate frame. There are several possible
notations to represent the pose of a target coordinate
frame with respect to a reference one, including the
homogeneous transformation matrix, Euler Angles,
etc. (Saeed, 2001) and (Spong and Vidyasagar, 1989).
Since we were using the Kawasaki robot and simula-
tor, we adopted the XYZOAT notation as defined by
Kawasaki. In that system, the pose of a frame F with
respect to a reference frame
∗
F is described by three
translational and three rotational parameters. That is,
the cartesian coordinates X, Y, and Z, plus the Orien-
tation, Approach, and Tool angles in the vector form:
X =
x y z φ θ ψ
T
This notation is equivalent to the homogeneous
transformation matrix:
H =
CφCθCψ−SθSψ −CφCθSψ− SφCψ CφSθ x
SφCθCψ+ CθSψ −SφCθSψ+ CφCψ SφSθ y
−SθCψ SθSψ Cθ z
0 0 0 1
(15)
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
290
where Sα = sin(α) and Cα = cos(α) and the an-
gles φ, θ, and ψ correspond, respectively, to O, A, and
T and represent:
• Rotation of φ about the ¯a-axis (z-axis of the mov-
ing frame) followed by
• Rotation of θ about the ¯o-axis (y-axis of the mov-
ing frame) followed by
• Rotation of ψ about the ¯a-axis (z-axis of the mov-
ing frame).
4 RESULTS
The controller was tested in three different scenarios:
pure linear movement; pure angular movement; and
combined movement. In all these cases, the camera
intrinsic parameters were:
A =
122.5 −3.7737 100
0 122.6763 100
0 0 1
(16)
The four feature points were arranged in a square
around the origin of the reference frame and had co-
ordinates:
w
c
1
= [−5 − 5 0]
T
w
c
2
= [5 5 0]
T
w
c
3
= [5 − 5 0]
T
w
c
4
= [−5 5 0]
T
(17)
The desired pose of the camera was the same for
all the simulations, only the start poses differ. The
desired pose of the camera was 20 units above the tar-
get object, exactly in the middle of the four feature
points. The camera was facing straight towards the
target object, i.e. its z-axis was perpendicular to the
xy-plane and pointing out. The x-axis of the camera
was antiparallel to the x-axis of the reference frame
and the y-axis parallel to the y-axis of the reference
frame. This pose can be described by:
∗
X
w
=
0 0 20 0
◦
180
◦
0
◦
T
(18)
The control gains used for the controller were:
K
v
=
25 0 0
0 25 0
0 0 25
(19)
K
ω
=
1.5 0 0
0 1.5 0
0 0 1.5
(20)
As mentioned in Section 3, we simulated both the
noisy and the discrete aspects of a real camera. That
is, we added noise to the image coordinates to simu-
late a typical accuracy of 0.5 pixels within a random
error of 2 pixels in any direction. These values were
obtained experimentally using real images and a pre-
viously developed feature extraction algorithm.
x
y
z
start position
desired position
−15
−5
−5
0
0
0
5
5
10
20
30
40
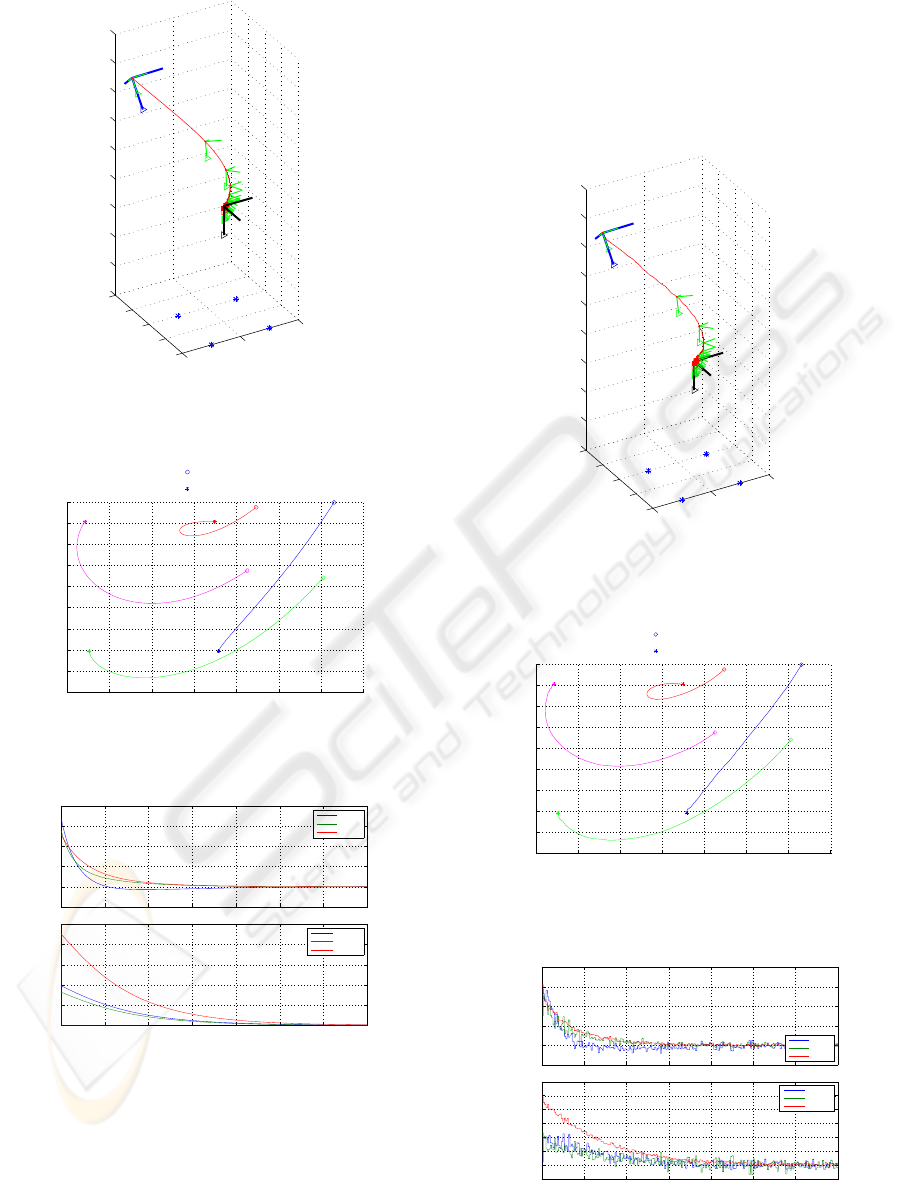
Figure 3: Linear motion simulation in euclidean space.
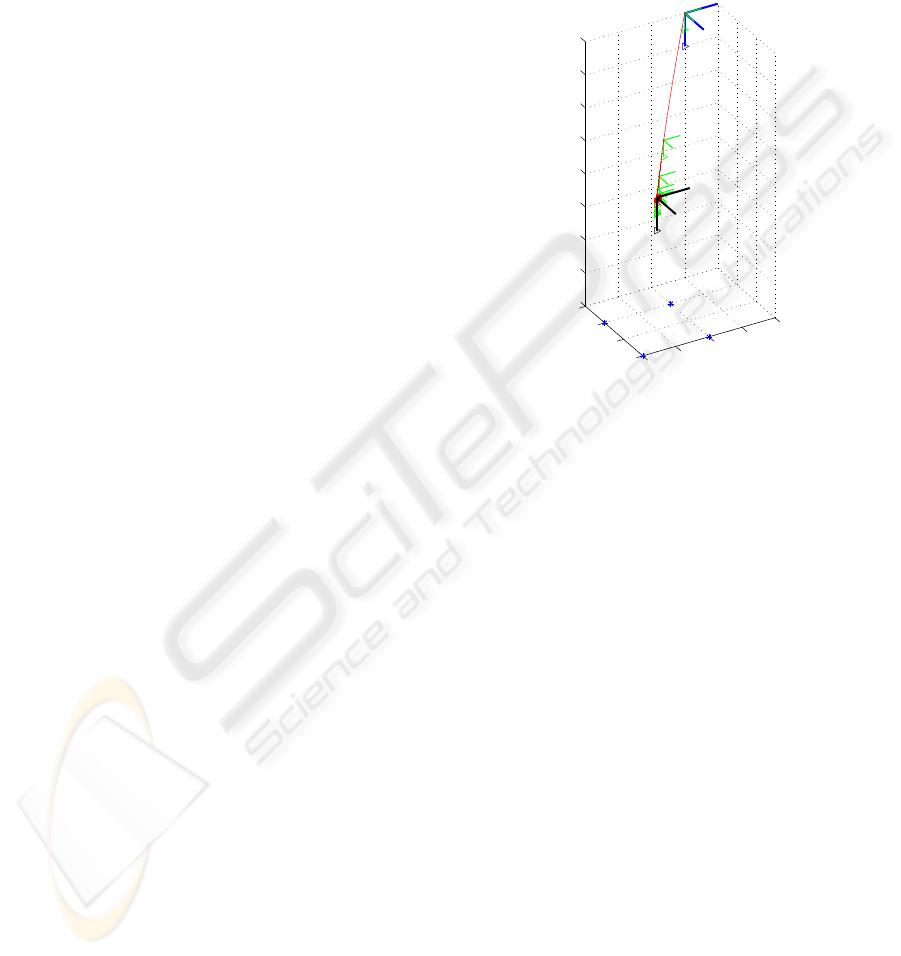
4.1 Linear Motion
In this simulation the camera did not rotate, i.e. the
orientation of the camera in the start pose was the
same as in the desired pose. The camera was sim-
ply moved 20 units along the z-axis of the reference
frame and -10 units along the x- and the y-axis of the
reference frame. The start pose was given by
◦
X
w
=
−10 −10 40 0
◦
180
◦
0
◦
T
(21)
Figure 3 shows the pose of the camera at ten time
instants. The z-axis of the camera – the direction in
which the camera is “looking” – is marked with a
triangle in the figure. The four points on the target
object, lying in the xy-plane, are marked with a star.
In Figure 4 the image coordinates of the four points
are shown. The image coordinate at the start pose is
marked with a circle, the image coordinate at the de-
sired pose with a star.
In Figure 5 the control inputs are shown. The first
part shows the linear velocities, the second part the
angular velocities of the camera.
IMPLEMENTATION OF A HOMOGRAPHY-BASED VISUAL SERVO CONTROL USING A QUATERNION
FORMULATION
291
u [pixel]
v [pixel]
start coordinates
desired coordinates
60
60
80
80
100
100
120
120
140
140
Figure 4: Coordinates of the feature points in image space
for the linear motion.
t [s]
v
c
v
c
ω
c
ω
c
−20
−4
0
0
1
3
4
5
7
20
40
×10
−15
Figure 5: Control input for the linear motion.
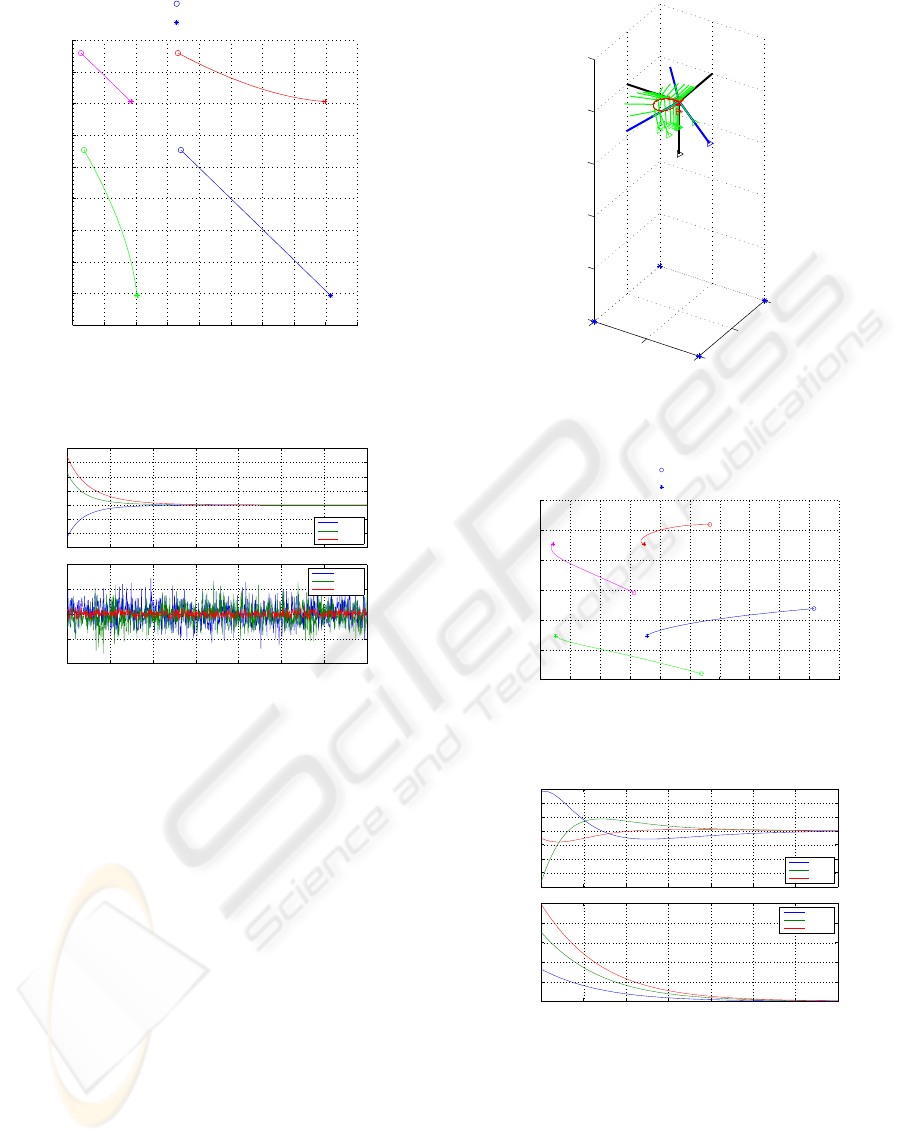
4.2 Angular Motion
In this simulation the start position of the camera was
identical to the desired position, only the orientation
differed. The start pose is given by:
◦
X
w
=
0 0 20 45
◦
150
◦
5
◦
T
(22)
As in Section 4.1 the figures 6, 7 and 8 show the
movement of the camera in euclidean space, the im-
age coordinates of the four feature points and the con-
trol variables.
4.3 Coupled Motion
In this simulation the camera could perform any
generic movement, i.e. both the position and the ori-
entation at the beginning differ from the desired pose
of the camera. The start pose is given by:
◦
X
w
=
10 −10 40 90
◦
140
◦
10
◦
T
(23)
x
y
z
start position
desired position
−5
−5
0
0
5
5
5
15
25
Figure 6: Angular motion simulation in euclidean space.
u [pixel]
v [pixel]
start coordinates
desired coordinates
60
80
100
120
140
160
200 240
Figure 7: Coordinates of the target points in image space
for the angular motion.
t [s]
v
c
v
c
ω
c
ω
c
−4
−2
0
0
0.2
0.4
1
2
3
5
7
Figure 8: Control input for the angular motion.
As in Section 4.1 the figures 9, 10 and 11 show
the movement of the camera in euclidean space, the
image coordinates of the four feature points and the
control variables.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
292
x
y
z
start position
desired position
−10
−10
0
0
0
10
10
20
30
40
Figure 9: Coupled motion simulation in euclidean space.
u [pixel]
v [pixel]
start coordinates
desired coordinates
60
80
80
100
120
120
140
160 200
Figure 10: Coordinates of the target points in image space
for the coupled motion.
t [s]
v
c
v
c
ω
c
ω
c
0
0
0.4
0.8
1
2
3
4
5 6
7
20
40
Figure 11: Control input for the coupled motion.
4.4 Influence of Noise
The setup for this simulation is the same as in Sec-
tion 4.3, but with noise added to the pixels. That is,
at each discrete time an image is grabbed a random
Gaussian noise N(0.5,2) is added to the pixel coordi-
nates.
As in Section 4.1 the figures 12, 13 and 14 show
the movement of the camera in euclidean space, the
image coordinates of the four feature points and the
control variables.
x
y
z
start position
desired position
−15
−10
−5
0
5
5
10
15
25
35
45
Figure 12: Coupled motion with noise simulation in eu-
clidean space.
u [pixel]
v [pixel]
start coordinates
desired coordinates
60
80
80
100
100
120
120
140
140 160 180 200
Figure 13: Coordinates of the target point in image space
for the coupled motion with noise.
t [s]
v
c
v
c
ω
c
ω
c
0
0
0.4
0.8
1
1.2
3
5
7
20
40
Figure 14: Control input for the coupled motion with noise.
IMPLEMENTATION OF A HOMOGRAPHY-BASED VISUAL SERVO CONTROL USING A QUATERNION
FORMULATION
293

5 CONCLUSIONS
An implementation of an image-based visual servo
controller using Matlab and C++ was presented. Var-
ious simulations with and without noise were con-
ducted and the controller achieved asymptotic regula-
tion in all cases. This implementation experimentally
validates the controller developed in (Hu et al., 2006)
and now that the controller is safe to use, new experi-
menations using the real robot can be carried out.
At this point, the control gains were kept small and
the discretized intervals were based on a normal cam-
era (30fps). Those choices let us achieve a conver-
gence in less than 7 seconds. However, for real-world
applications, those same choices must be revised so
that the convergence can be made a lot faster.
The control model and all software modules used
in this paper will be made available on line at
http://vigir.missouri.edu
REFERENCES
Chou, J. C. K. and Kamel, M. (1991). Finding the posi-
tion and orientation of a sensor on a robot manipulator
using quaternions. International Journal of Robotics
Research, 10(3):240–254.
DeSouza, G. N. and Kak, A. C. (2004). A subsumptive,
hierarchical, and distributed vision-based architecture
for smart robotics. IEEE Transactions on Systems,
Man and Cybernetics - Part B, 34(5).
Hirsh, R., DeSouza, G. N., and Kak, A. C. (2001). An it-
erative approach to the hand-eye and base-world cal-
ibration problem. In Proceedings of 2001 IEEE In-
ternational Conference on Robotics and Automation,
volume 1, pages 2171–2176. Seoul, Korea.
Hu, G., Dixon, W., Gupta, S., and Fitz-Coy, N. (2006). A
quaternion formulation for homography-based visual
servo control. In IEEE International Conference on
Robotics and Automation, pages 2391–2396.
Hutchinson, S., Hager, G. D., and Corke, P. (1996). A tu-
torial on visual servo control. IEEE Transactions on
Robotics & Automation, 12(5):651–670.
Saeed, B. (2001). Introduction to Robotics, Analysis, Sys-
tems, Applications. Prentice Hall Inc.
Spong, M. W. and Vidyasagar, M. (1989). Robot Dynamics
and Control. John Wiley & Sons.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
294
