
FREQUENCY CONTROL FOR ULTRASONIC PIEZOELECTRIC
TRANSDUCERS, BASED ON THE MOVEMENT CURRENT
Constantin Voloşencu
Automatics and Applied Informatics Department, “Politehnica” University of Timisoara
Bd. V. Parvan nr. 2, 300223 Timisoara, Romania
Keywords: Control systems, Piezoelectric transducers, Frequency control, High power ultrasonics.
Abstract: This paper provides a method for frequency control at the ultrasonic high power piezoelectric transducers,
using a feedback control systems based on the first derivative of the movement current. This method assures
a higher efficiency of the energy conversion and greater frequency stability. A simulation for two kinds of
transducer model is made. The method is implanted on a power electronic generator. Some transient
characteristics are presented.
1 INTRODUCTION
Piezoelectric transducers (Gallego-Juarez, 1989)
have proved their huge viability in the high power
ultrasonic applications as cleaning, welding,
chemical or biological activations and other for
many years (Hulst, 1972), (Neppiras, 1972). And
these applications continue to be of a large necessity.
The power ultrasonic transducers are fed with
power inverters, using transistors working in
commutation at high frequency (Bose, 1992). A
large scale of electronic equipments, based on
analogue or digital technology, is used for control in
the practical applications (Marchesoni, 1992.).
A good efficiency of the energy conversion in
the power ultrasonic equipments is very important to
be assured. Different control methods are used in
practice to control the signal frequency in the power
inverters (Ramos, et. all., 1985), (Fabianski and
Palczynski, 1989).
The high power ultrasonic piezoelectric
transducers are analysed with complex structures by
using equivalent circuits (Lazaro et. all. 1989),
starting from Mason's model, implemented on circuit
analysis programs (Morris, 1986).
Many frequency control methods, structures and
devices, on this field of interest, are patented.
This paper presents a method to control the
frequency of the feeding voltage for the piezoelectric
transducer. A power amplifier working in
commutation at high frequency generates the
feeding voltage. The control system is based on a PI
controller, which keep at zero the derivative of the
movement current. This control assures the
maximum of the mechanic power generated by the
transducer.
2 RELATED WORK
To perform an effective function of an ultrasonic
device for intensification of different technological
processes a generator should have a system for an
automatic frequency searching and tuning in terms
of changes of the oscillation system resonance
frequency. The article (Khmelev, et all., 2001)
presents a system of phase-locked-loop frequency
control of ultrasonic generators with automatic
resonance frequency searching in the given band of
frequencies.
In (Furuichi and Nose, 1981) a driving circuit for
ultrasonic tools which uses a piezoelectric
transducer to convert ultrasonic electric signals into
ultrasonic mechanical vibrations includes a voltage-
controlled oscillator which produces an output signal
at a frequency that is proportional to an input
voltage, a power amplifier stage having its input
coupled to the output of the voltage-controlled
oscillator.
In (Hasegawa, 2003) an automatic frequency
control (AFC) circuit is based on a frequency offset
estimating circuit produces a lock signal if a
calculated frequency error becomes smaller than a
predetermined value.
194
Volo¸sencu C. (2008).
FREQUENCY CONTROL FOR ULTRASONIC PIEZOELECTRIC TRANSDUCERS, BASED ON THE MOVEMENT CURRENT.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - SPSMC, pages 194-199
DOI: 10.5220/0001503801940199
Copyright
c
SciTePress
The dynamic characteristics of a fixed measuring
transducer are defined not only by the parameters of
its mechanical system and the ability to convert
mechanical into electrical energy but also by the
properties of the object on which the transducer is
mounted and by the mounting rigidity. In the paper
(Senchenkov, 1991) the block diagram is discussed
of a system that will detect and evaluate the faults in
measuring transducers by comparing the amplitude-
frequency characteristic obtained by applying
electric pulses to the piezoelement of the transducer
with the amplitude-frequency characteristics
obtained for the transducer in its natural state and at
the moment after it has been mounted on an object.
In (Sullivan, 1983) a power supply is provided
for an electromechanical device of the type
employing ultrasonic frequency vibratory energy for
bonding materials. An automatic frequency control
varies the output frequency of the power supply until
the ratio of the maximum to minimum amplitudes of
a standing wave produced in the mechanical
vibratory member falls below a pre-set maximum.
The power supply frequency is automatically varied
to maintain the standing wave ratio below a pre-set
value which is deemed to be an acceptable value for
efficient transfer of power.
3 CONTROL PRINCIPLE
3.1 The Equivalent Circuit of the
Piezoelectric Transducer
The electrical energy of ultrasonic frequency in the
bandwidth of 20-80 kHz is converted in mechanical
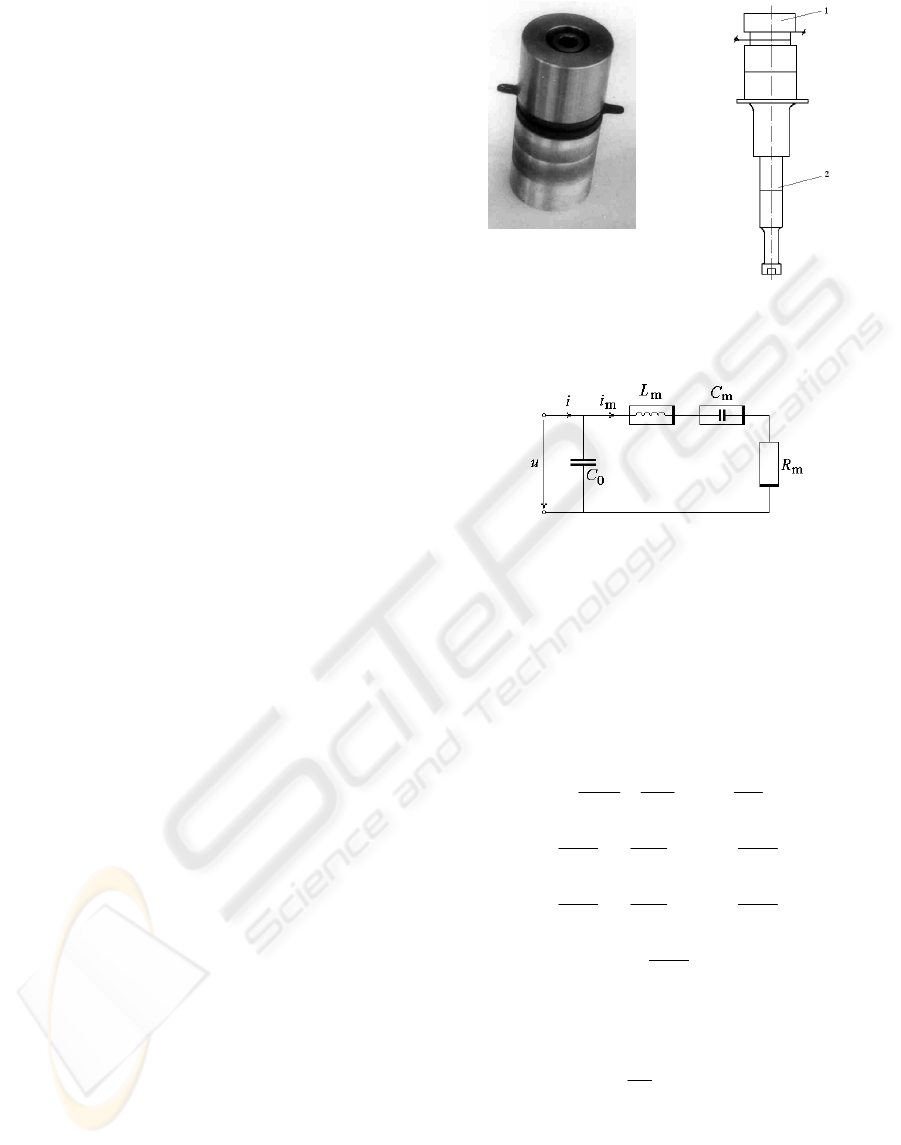
energy using piezoelectric transducers. A kind of
piezoelectric transducer of 100 W is presented in
figure 1,a. In practice the transducer (1) is
mechanical coupled with an energy concentrator (2),
as is presented in figure 1,b).
The ultrasonic piezoelectric transducers have the
equivalent electric circuit from figure 2. In this
circuit there is emphasized the mechanical part, seen
as a series RLC circuit, with the equivalent
parameters R
m
, L
m
and C
m
, which are nonlinear,
depending on the transducer load.
Figure 1 a): A piezoelectric
transducer.
Figure 1 b): Piezoelectric
transducer coupled with an
energy concentrator.
Figure 2: The equivalent circuit of the piezoelectric
transducer.
The current through the mechanical part i
m
is the
movement current. The input capacitor C
0
of the
transducer is consider as a constant parameter.
The equations (1) are describing the time
variation of the signals and the mechanical
parameters.
dt
di
Li
dt
dL
dt
d
u
m
mm
mLm
Lm
+=
ϕ
=
dt
du
Cu
dt
dC
dt
dq
i
Cm
mCm
mCm
Cm
+===
dt
du
Cu
dt
dC
dt
dq
i
Cm
mCm
mCm
Cm
+===
m
Rm
m
di
du
R =
m
iii
+
=
0
RmCmLm
uuuu +
+
=
00 C
i
dt
du
C =
(1)
where ϕ is the magnetic flux through the mechanical
inductance
L
m
and q is the electric load over the
mechanical capacitor C
m
.
The piezoelectric traducer has a frequency
characteristic of its impedance
Z with a series and a
parallel resonance, as it is presented in figure 3.
FREQUENCY CONTROL FOR ULTRASONIC PIEZOELECTRIC TRANSDUCERS, BASED ON THE MOVEMENT
CURRENT
195
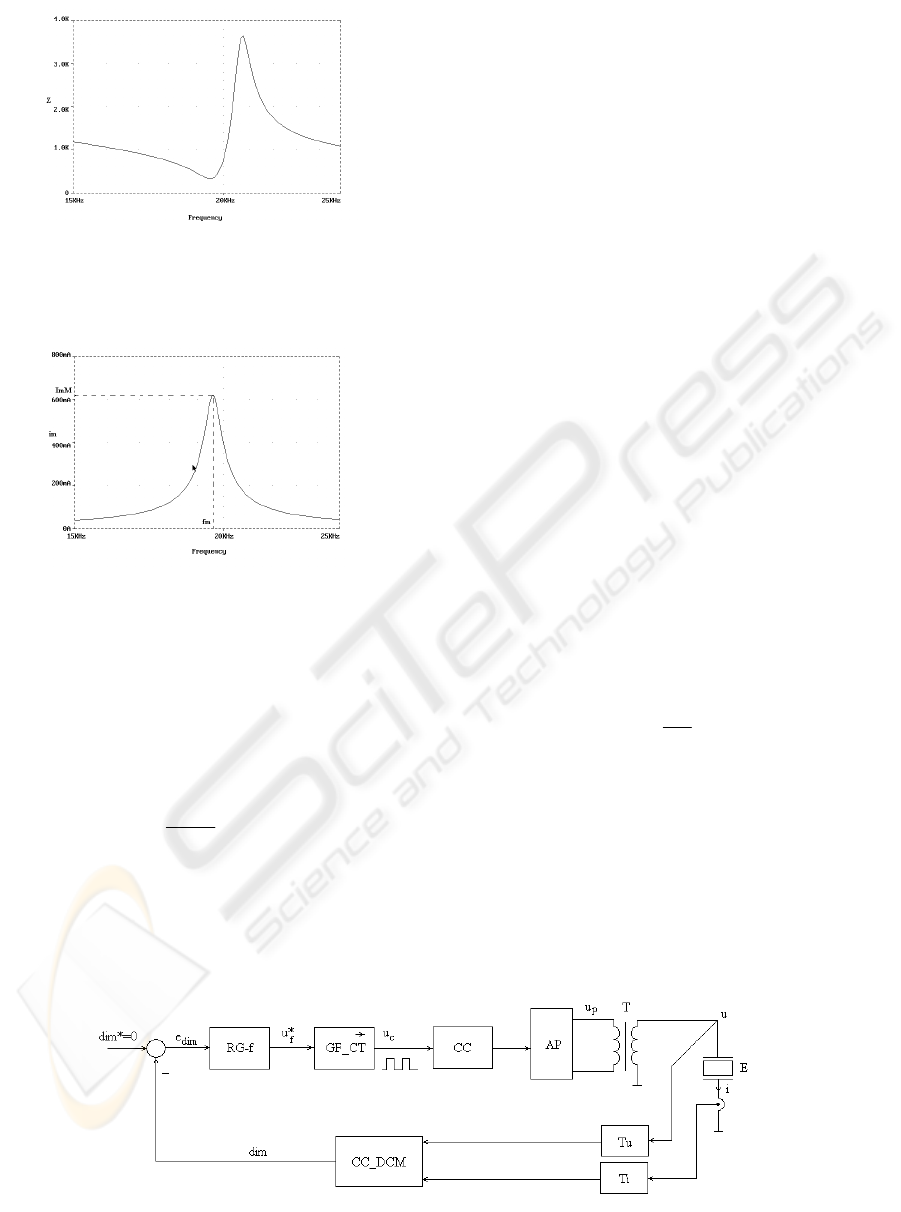
Figure 3: The frequency characteristic of the transducer
impedance.
The movement current i
m
has the frequency
characteristics from figure 4.
Figure 4: The frequency characteristic of the transducer
impedance.
The maximum mechanical power developed by
the transducer is obtained when it is fed at the
frequency
f
m
, were the maximum movement current
i
m
=I
mM
is obtained. Of course, the maximum of the
movement current i
m
is obtained when the derivative
of the absolute value of the movement current
dim is
zero:
0
||
)dim( ==
d
t
id
t
m
(2)
So, a frequency control system, functioning after
the error of the derivative movement current may be
developed, is using a PI frequency controller, to
assure a zero value for this error in the permanent
regime.
3.2 The Frequency Control System
The block diagram of the frequency control system
based on the above assumption is presented in figure
5.
A power amplifier AP, working in commutation,
at high frequencies, feeds a piezoelectric transducer
E, with a rectangular high voltage
u, with the
frequency f. An output transformer T assures the
high voltage
u for the ultrasonic transducer E. A
command circuit CC assures the needed command
signals for the power amplifier AP. The command
signal
u
c
is a rectangular signal, generated by a
voltage controlled frequency generator GF_CT. The
rectangular command signal
u
c
has the frequency f
and equal durations of the pulses. The frequency of
the signal
u
c
is controlled with the voltage u
f
*. The
signal u
f
* to control the frequency f of the transducer
is provided by the frequency controller RG-f.
The frequency control system from figure 4 is
based on the derivative movement current error
e
dim
:
dimdim
*
dim
−=e
(3)
as the difference between the reference value
dim*=0 and the computed value of the derivative
dim.
A PI controller is used to control the frequency,
with the following transfer function:
)(
1
1)(
dim
*
se
sT
Ksu
R
Rf
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+=
(4)
The frequency controller is working after the
error of the derivative of the movement current
e
dim
.
Figure 5: The block diagram of the frequency control system.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
196
The derivative of the movement current dim is
computed using a circuit CC_DCM, where C
0
is the
known constant value of the capacitor from
transducer input and
u and i are the measured values
of the transducer voltage and current.
The voltage upon the transducer
u and the
current i through the transducer are measured using
a voltage sensor Tu and respectively a current sensor
Ti.
4 MODELING AND SIMULATION
Some models for different parts of the block
diagram from figure 5 were developed to test the
control principle by simulation.
Two models are tested for the transducer. In the
first model the parameters of the mechanical part are
considered with a static value and a dynamical
variation. In the second model the electromechanical
transducer is considered coupled with a mechanical
concentrator.
Approximating the relations (1), the following
relations are used to model the behaviour of the
piezoelectric transducer:
)()()()()( sissLsissLsu
mmmmLm
+
=
)()()()()( ssussCsussCsi
CmmCmmCm
+
=
)]([
1
)( ssiR
s
su
mmRm
=
)()()()( susususu
RmCmLm
++=
(5)
The movement current i
m
(s) is modelled, based on
the above relations, with the following relation:
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
×−×−×= )()(
1
.
1
)(
11
)( siRsi
Cs
su
Ls
si
mmm
mm
m
(6)
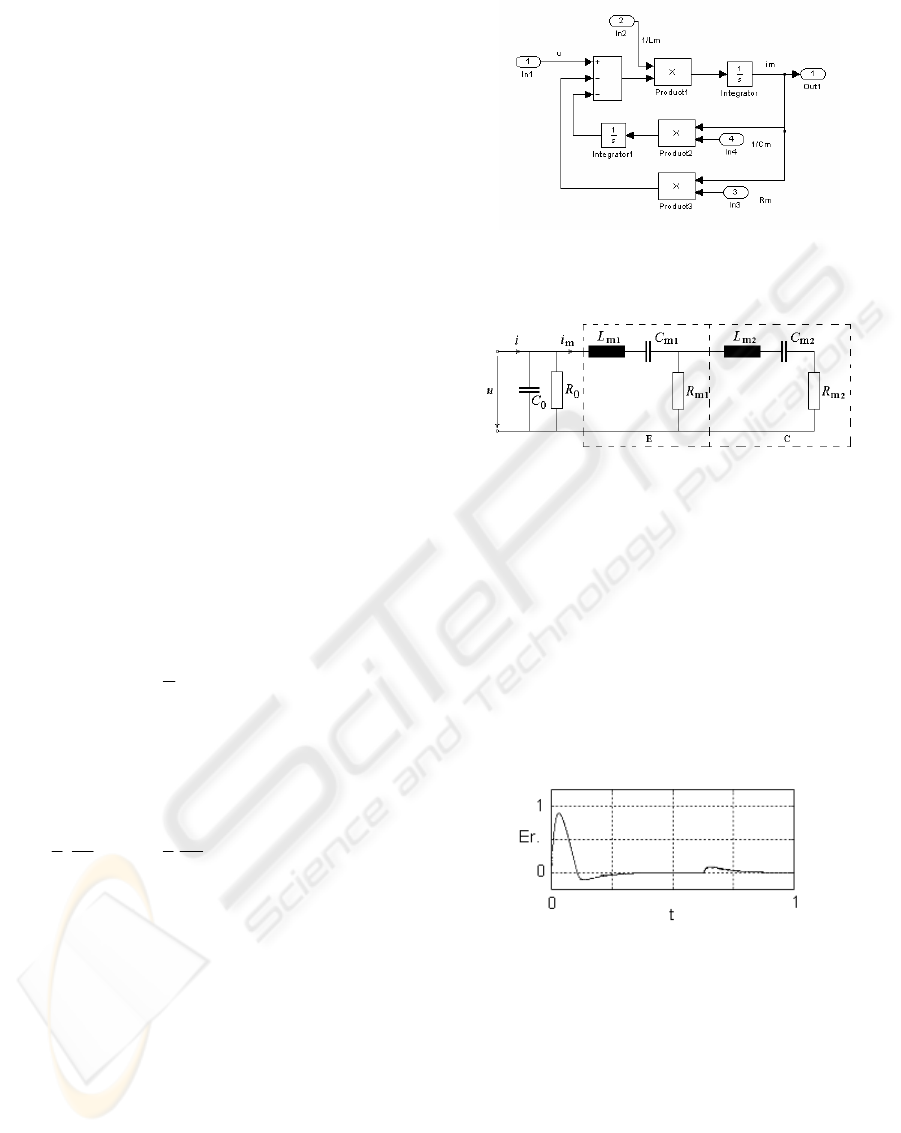
The block diagram of the movement current
model is presented in figure 6.
The mechanic parameters from the above
relations have the variations given by relations (7),
in the vicinity of the stationary points R
m0
, L
m0
and
C
m0
.
mmm
mmm
mmm
CCC
LLL
RRR
Δ+=
Δ+=
Δ
+
=
0
0
0
(7)
A second model is taken in consideration. The
transducer is considered coupled with the
concentrator and the equivalent circuit is presented
in figure 7.
Figure 6: The block diagram, model for the mechanical
part of the piezoelectric transducer.
Figure 7: Equivalent circuit of the transducer with
concentrator.
In this model there is a series RLC with the
parameters L
m1
, C
m1
and R
m1
for the transducer T
and a series RLC circuit with the parameters L
m2
,
C
m2
and R
m2
for the concentrator C, coupled in
cascade.
The parts of the control block diagram are
modelled using Simulink blocks. A transient
characteristic of the frequency error e
dim
from the
control system is presented in figure 8.
Figure 8: Transient characteristic for the frequency control
system, obtained by simulation.
The simulation is made considering for the first
model the variation with 10 % at the transducer
parameters. The deviation in frequency is eliminated
fast. The frequency response has a small overshoot.
FREQUENCY CONTROL FOR ULTRASONIC PIEZOELECTRIC TRANSDUCERS, BASED ON THE MOVEMENT
CURRENT
197
5 IMPLEMENTATION AND TEST
RESULTS
The frequency control system is developed to be
implemented using analog, high and low power,
circuits, for general usage. The power amplifier AP
is realized using four power MOSFET transistors, in
a full bridge, working in commutation at high
frequency. The voltage controlled frequency
generator GF_CT is realized using a phase lock loop
PLL circuit and a comparator. The computing circuit
CC_DCM, which implements the relations and the
frequency controller RG-f are realized using
analogue operational amplifiers. The transformer T
is realized using ferrite cores.
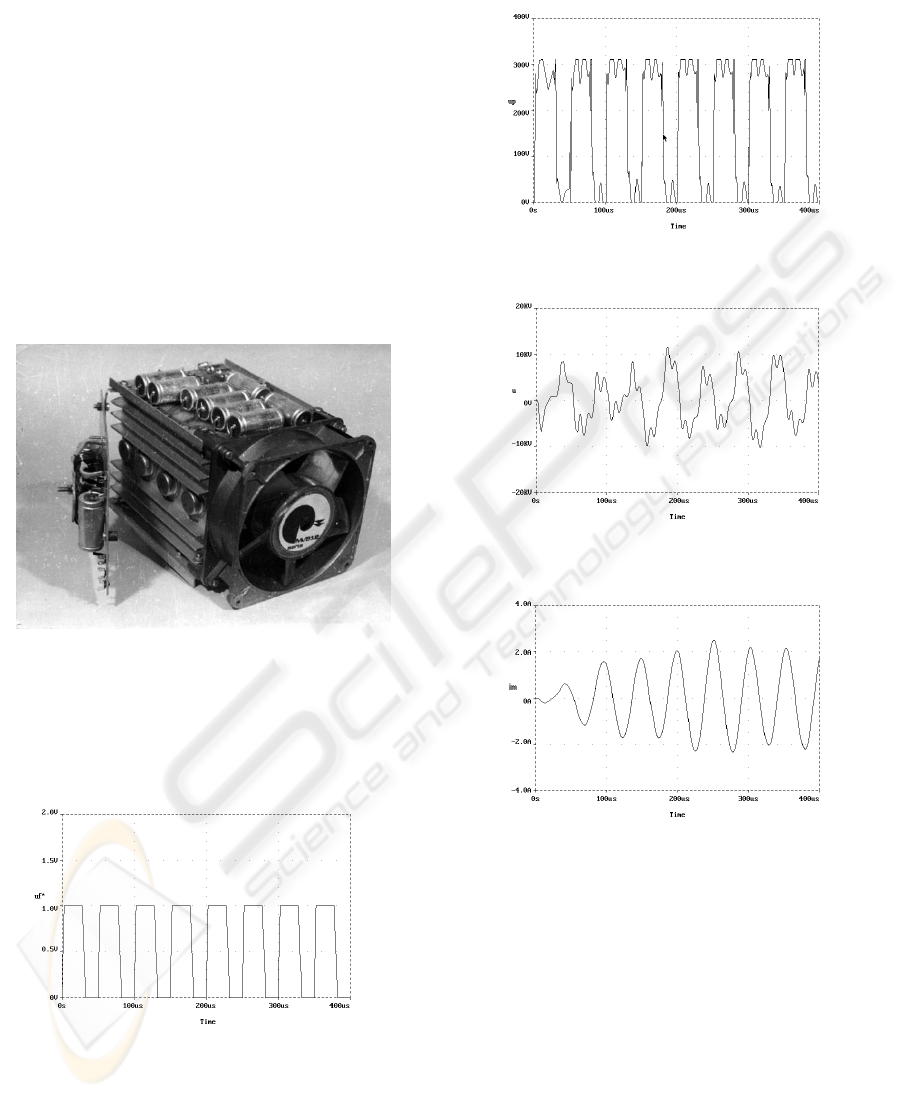
The electronic generator is presented in figure 9.
Figure 9: The electronic generator.
In the following figures some transient signal
variations of the control system are presented.
The pulse train of the command voltage u
c
is
presented in figure 10.
Figure 10: Examples of sensor impulse trains.
The output voltage of the power amplifier is
presented in figure 11.
The voltage u over the piezoelectric transducer is
presented in figure 12.
The measured movement current i
m
is presented
in figure 13.
Figure 11: The output voltage.
Figure 12: The transducer voltage.
Figure 13: The movement current.
6 CONCLUSIONS
In this paper a method to control the frequency of
the piezoelectric ultrasonic transducers based on the
movement current through the mechanical part of
the equivalent circuit of the transducer is presented.
The principle of this method is to assure the
maximum mechanical power developed by the
transducer, based on the measured transducer’s
voltage and current, controlling the feeding voltage
frequency, as the derivative of the movement current
to be zero.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
198

The frequency control system was modelled and
simulated using Matlab and Simulink. Two models
for the mechanical part of the transducer are chosen.
Two different regimes for the time variations of the
mechanical parameters of the transducer was chosen
and tested. A Simulink model and a simulation result
are presented. The simulation results have proven
that the control principle developed in this paper
gives good quality criteria for the output frequency
control.
The control system is implemented using a
power inverter with transistors working in
commutation at high frequencies and analogue
circuits for command. Transient characteristics of
the control systems are presented.
The frequency control system may be developed
for piezoelectric transducers in a large scale of
constructive types, powers and frequencies, using
general usage analogue components, at a low price,
with good control criteria.
REFERENCES
Bose, B.K., 1992. Evaluation of Modern Power
Semiconductor Devices and Future Trends of
Converters, In IEEE Trans. on Industry Applications,
march/april, vol.28, no. 2.
Gallego-Juarez, J.A., 1989. Piezoelectric Ceramics and
Ultrasonic Transducers, In J. Phys. Sci. Instrum. (U.K.),
oct., vol. 22, no. 10.
Hulst, A.P., 1972. Macrosonics in industry 2. Ultrasonic
welding of metals, In Ultrasonics, Nov.
Fabianski, P., Palczynski, L., 1989. Power Inverter with
Self-Tuning Output Frequency for Ultrasonic Cleaning
System, In EPE'89, 3-rd European Conference on
Power Electronics and Applications, Aachen,
Germany, oct.
Khmelev, V.N., Barsukov, R.V., Barsukov, V., Slivin,
A.N., Tchyganok, S.N., 2001. System of phase-
locked-loop frequency control of ultrasonic generators,
In Electron Devices and Materials, 2001.
Proceedings. 2nd Annual Siberian Russian Student
Workshop on.
Lazaro, O.J.C., San Sanche, P.T., Gallego-Juarez, J.A.,
1989. Analysis of an ultrasonic transducer with
complex structure by using equivalent circuits, In
Ultrasonics International, Conference Proceedings,
Madrid, Spain.
Marchesoni, M., 1992. High-Performance Current Control
Techniques for Applications to Multilevel High-Power
Voltage Source Inverters, In IEEE Trans. on Power
Electronics, Jan.
Morris, A.S., 1986. Implementation of Mason's model on
circuit analysis programs, In IEEE Transactions on
ultrasonics, ferroelectric and frequency control, vol.
UFFC-33, no. 3.
Mori, E., 1989. High Power Ultrasonic Wave Transmission
System, In J. Inst. Electron. Inf. Commun. Eng., vol. 72,
no. 4, April.
Neppiras, E.A., 1972. Macrosonics in industry, 1.
Introduction. In Ultrasonics, Jan.
Ramos, F.A., Montoya, V.F., Gallego-Juarez, J.A., 1985.
Automatic system for dynamic control of resonance in
high power and high Q ultrasonic transducers, In
Ultrasonics, July.
I. K.Senchenkov, I.K., 1991. Resonance vibrations of an
electromechanical rod system with automatic
frequency control, In International Applied
Mechanics, Vol. 27, No. 9/ Sept., Springer, N. Y.
Furuichi, S., Nose, T., 1981. Driving system for an
ultrasonic piezoelectric transducer, U.S. patent
4271371.
Hasegawa, O., 2003. Automatic frequency control circuit,
U. S. Patent 6571088.
Sullivan, R.A., 1983. Power supply having automatic
frequency control for ultrasonic bonding, U. S. Patent
4389601.
FREQUENCY CONTROL FOR ULTRASONIC PIEZOELECTRIC TRANSDUCERS, BASED ON THE MOVEMENT
CURRENT
199
