
SLIDING
MODE CONTROL
Is it Necessary Sliding Motion?
L. Acho
Department of Applied Mathematics III, EUETIB-Universidad Polit
´
ecnica de Catalu
˜
na
Comte d’Urgell 187, 08036-Barcelona, Spain
Keywords:
Sliding Mode Control.
Abstract:
Sliding mode control has been recognized to be insensitive to exogenous perturbations if the reachability
conditions is warranted. Two phases follow the dynamics of the closed-loop perturbed system: 1) Finite-time
convergence to the sliding surface, and 2) Sliding motion along the sliding surface. In the sliding motion the
system has a reduced-order dynamic behavior. But, is it really necessary to have sliding motion to warranty
the robustness property of the sliding mode controller? The main objective of this position paper is to theorize
this important question.
1 INTRODUCTION
The most distinguished feature of sliding mode con-
trol it its ability to issue very robust control systems
facing exogenous perturbations. Moreover, sliding
mode control has been applied to a wide variety of
control objectives such as regulation, tracking con-
trol, model following, adaptive control, observer de-
sign, among others (Perruqueti and Barbot, 2002; Ed-
wards and Spurgeon, 1998). However, in all issues,
sliding motion is secure to keep operable the sliding
mode controller. Basically, the sliding controller in-
volves two steps design. Ones is the finite-time con-
vergence to the discontinuity manifold (the sliding
surface), and the second one is the design of the slid-
ing dynamics. However, and according with the ex-
amples given here, sliding motion is not necessary to
warranty the main property of sliding controllers: in-
sensitiveness to external perturbations. The outline of
this position paper is as follows. The basic idea of
sliding mode control using a second-order system is
studied in Section two. Section three, two examples
where not sliding motion exits all the time are granted
and applied to a perturbed system illustrating that the
insensitiveness property is not loss. Finally, Section
five the conclusions are stated.
2 SLIDING MODE CONTROL
The basic idea of sliding mode control can be il-
lustrated using second-order system (J. Y. Hung and
HUng, 1993; Edwards and Spurgeon, 1998; Perru-
queti and Barbot, 2002). At this point, consider the
following system (Perruqueti and Barbot, 2002):
˙x
1
= x
2
˙x
2
= −x
2
+ u. (1)
This system represents a dc-motor model, where u is
the scalar input control. Let us assume that the sliding
surface is specified as:
s(x
1
,x
2
) = x
2
+ αx
1
= 0, α > 0. (2)
The control objective consists to find a control law u
such that the sliding surface is attractive and reachable
in finite time. In the sliding surface, the sliding mode
motion then takes place (Perruqueti and Barbot, 2002;
Edwards and Spurgeon, 1998; J. Y. Hung and HUng,
1993). The reachability in finite time is warranted if
s ˙s ≤ η|s|, η > 0, (3)
called the η−reachability condition (Edwards and
Spurgeon, 1998; Perruqueti and Barbot, 2002). Then,
from (2), we have
s ˙s = s( ˙x
2
+ α ˙x
1
). (4)
Invoking (1), we get
275
Acho L. (2008).
SLIDING MODE CONTROL - Is it Necessary Sliding Motion?.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - SPSMC, pages 275-277
DOI: 10.5220/0001504202750277
Copyright
c
SciTePress
s ˙s = s(−x
2
+ u + αx
2
)
= s((α − 1)x
2
+ u). (5)
If we set
u = −(α − 1)x
2
− ηsgn(s), η > 0, (6)
we arrive to
s ˙s = s(−ηsgn(s)) = −η|s|. (7)
So, any trajectory of the closed-loop system (1) and
(6), reaches the sliding surface s = 0 in finite time.
Furthermore, in the sliding surface, the dynamic mo-
tion yields:
x
2
+ αx
1
= ˙x
1
+ αx
1
= 0 ⇒ ˙x
1
= −αx
1
(8)
which is asymptotically stable because α > 0. Ob-
serve that the trajectory in the sliding surface can not
scape from it. In resume, slide mode control involves
two steps. Design a control law such as the sliding
manifold be attractive and reachable in finite time,
and design the sliding mode dynamics such as it is
asymptotically stable. Also, it is recognizable that in
sliding motion the order of the system is reduced from
two to one. Let us now assume exogenous perturba-
tion in our system. So, let it be as:
˙x
1
= x
2
˙x
2
= −x
2
+ u + sin(t) (9)
where the exogenous perturbation is bounded. Then,
using (6), we have:
s ˙s = −η|s| + sin(t)s ≤ −η|s| + |s| = −|s|(η − 1).
(10)
So, the η-reachability condition is satisfied with η > 1
and any trajectory of the closed-loop perturbed sys-
tem (9) and (6) reaches the sliding surface in finite
time, where its sliding mode dynamics ( ˙x
1
= −αx
1
)
is unaltered in spite of the external perturbation. Sim-
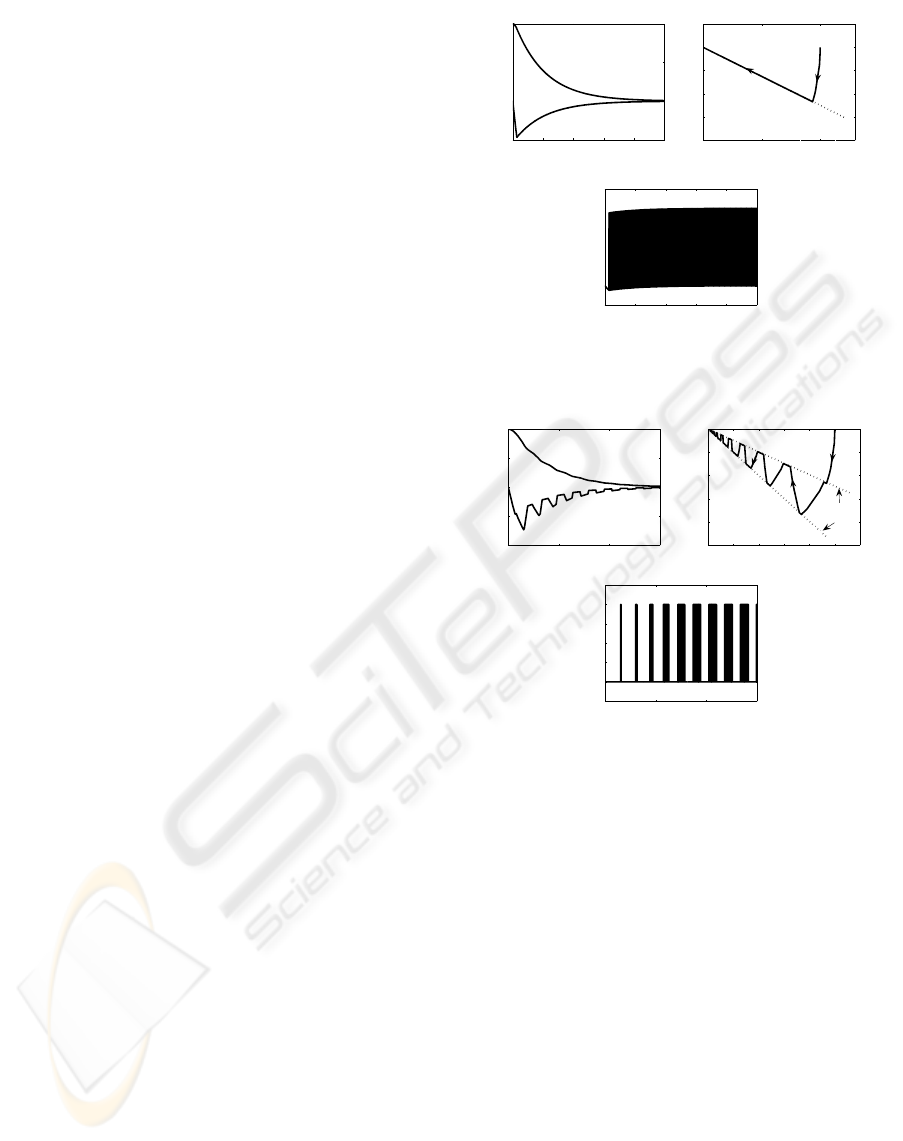
ulations results are given in Fig. 1 with α = 0.5 and
η = 2.
3 MODIFIED SLIDING MODE
CONTROL
Here, our main contributions are stated. The objec-
tive is to eliminate the persistency of chattering in
the control law keeping the benefits of the sliding
0 2 4 6 8 10
−0.5
0
0.5
1
Time(sec.)
0 0.5 1
−0.8
−0.6
−0.4
−0.2
0
0.2
x
2
x
1
0 2 4 6 8 10
−3
−2
−1
0
1
2
3
Time(sec.)
Control law
sliding
surface
x1
x2
Figure 1: Simulations results of the perturbed system with
x
1
(0) = 1 and x
2
(0) = 0.
0 2 4 6
−1
−0.5
0
0.5
1
Time(sec.)
0 0.2 0.4 0.6 0.8 1
−1
−0.8
−0.6
−0.4
−0.2
0
x
2
x
1
0 2 4 6
−3
−2
−1
0
1
2
3
Time(sec.)
Control law
x
1
x
2
sliding
surfaces
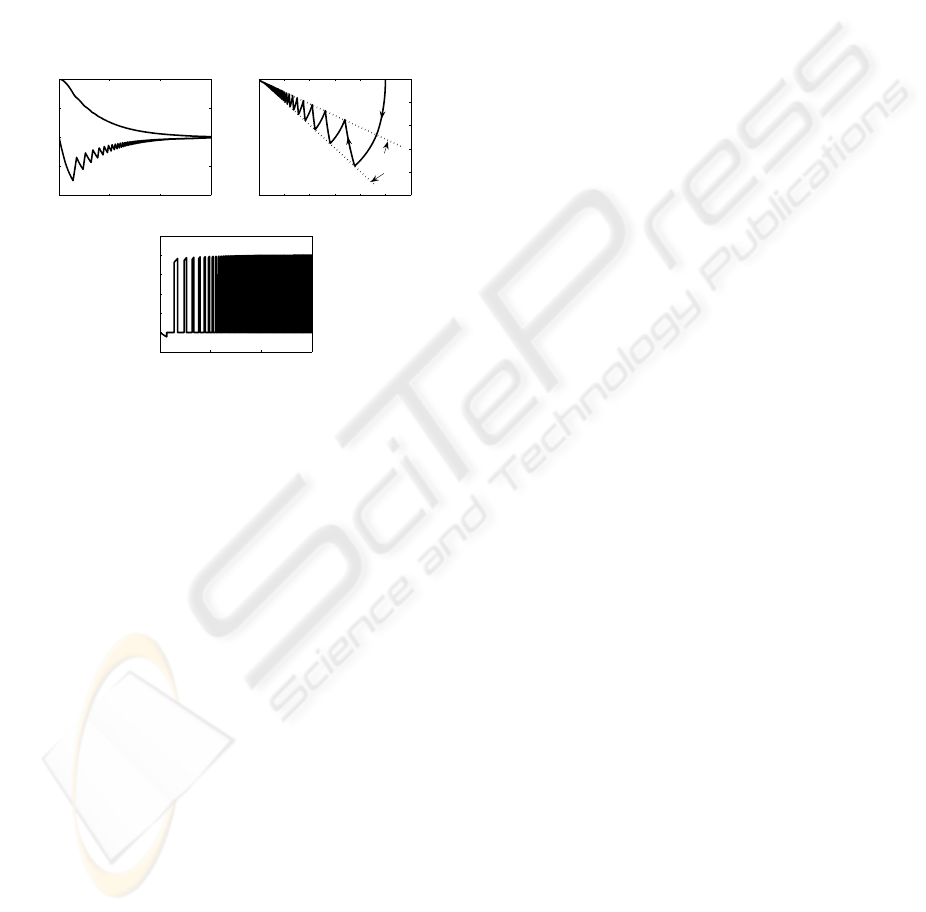
Figure 2: Simulations results of the perturbed system with
x
1
(0) = 1 and x
2
(0) = 0 utilizing the modified sliding mode
control.
mode control. From Fig. 1, when the system is per-
turbed and the η-reachability conditions is satisfied,
the closed-loop system is insensitive to external per-
turbations, but chattering is sustained almost all the
time. One way to reduce persistency on chattering
is by means of changing the value of α in (6) and
(2). For instance, employing the same perturbed sys-
tem (9), with η = 2, and the same initial conditions;
changing α from 0.5 to 1 at a frequency of 5/πHz (a
square signal), the simulation results are shown in Fig.
2. Here, the property of insensitiveness to external
perturbations is evident and the chattering persistency
is reduced. The commutation in the value of α is sim-
ilar to commuting between two sliding surfaces (see
Fig. 2). This works because the η-reachability con-
dition ensures insensitiveness to exogenous perturba-
tions. Here, sliding motion just occurs a certain time.
So, the price is that sliding motion is not preserved
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
276
all the time; i.e., the reduced order dynamic motion
is not sustained all the time. But, it is not so impor-
tant from the robust control of view (mitigation of the
external perturbation). Moreover, we can commutate
between these sliding surfaces avoiding sliding mo-
tion; i.e., when the trajectory hits a sliding surface
(warranted by the η-reachability condition), commu-
tate to the other one (see Fig. 3). In Fig. 3, chatter-
ing occurs as a Zeno behavior, that is, the number of
switching in the control law tends to infinite in finite
time.
0 2 4 6
−1
−0.5
0
0.5
1
Time(sec.)
0 0.2 0.4 0.6 0.8 1
−1
−0.8
−0.6
−0.4
−0.2
0
x
1
x
2
0 2 4 6
−3
−2
−1
0
1
2
3
Time(sec.)
Control law
x
1
x
2
Sliding
surfaces
Figure 3: Simulations results of the perturbed system with
x
1
(0) = 1 and x
2
(0) = 0 utilizing a second modified sliding
mode control.
4 CONCLUSIONS
Employing second-order dynamic systems, we evi-
denced that sliding motion is not required to keeping
insensitive property of sliding mode control. Also,
with the examples shown here, chattering is not per-
sistently exhibited. So, we have presented an impor-
tant observation about this topic, that we think it will
open further comments on it.
REFERENCES
Edwards, C. and Spurgeon, S. K. (1998). Sliding Mode
Control: Theory and Applications. Taylor and Fran-
cis, Ltd., UK, 1nd edition.
J. Y. Hung, W. G. and HUng, J. C. (1993). Variable struc-
ture control: A survey. In IEEE Trans. on Industrial
Electroncis. Vol. 40, No.1, 2–2.
Perruqueti, W. and Barbot, J. P. (2002). Sliding Mode Con-
trol in Engineering. Marcel Dekker, Inc., New York,
1nd edition.
SLIDING MODE CONTROL - Is it Necessary Sliding Motion?
277
