
TOWARDS A STANDARDIZED AND EXTENSIBLE
MECHANISM FOR ROBOT DEVICE INTEGRATION
A XIRP-based Approach and Test Bed Implementation
Fan Dai and Joachim Unger
ABB Corporate Research, Wallstadter Str. 59, D-68526 Ladenburg, Germany
Keywords: Robot device integration, plug and produce, XML, XIRP.
Abstract: In industrial robot automation, the integration of intelligent peripheral devices becomes more and more
important. But there is no standardized mechanism to setup the communication interface between them and
to configure the usage of the device information for the robot applications. This makes the integration task
often very tedious and time consuming. XIRP – the XML-based Interface for Robots and Peripherals is a
recommendation that was published by the German standardization institute DIN in 2006. It specifies a
standardized mechanism and the corresponding communication protocol for robot device integration. Our
experiences with XIRP-based implementations have shown its big potential to support robotics PnP on the
communication and configuration level. As one of the topics within the SMErobot™ project, we are
working on further developments or the concept. This paper introduces our approach for a revised XIRP
concept, and discusses our experiences made on test-bed implementations.
1 INTRODUCTION
Integration of peripheral devices like sensors to an
industrial robot becomes more and more important
because of the demands on more intelligent
solutions. However, there is no standardized
mechanism to achieve the integration. In most cases,
proprietary interfaces and protocols are used that
require a profound knowledge about the
communication level and often requires an
implementation of the interface on one of the
devices. This often causes significant costs and time
efforts and is one of the burdens especially for small
and medium-sized enterprises for using industrial
robots in their environments. There is a high demand
to support “Plug and Produce” (PnP) integration. It
should be as easy as plug-in a USB device to a
personal computer, so that the devices are
recognized, configured and ready to use.
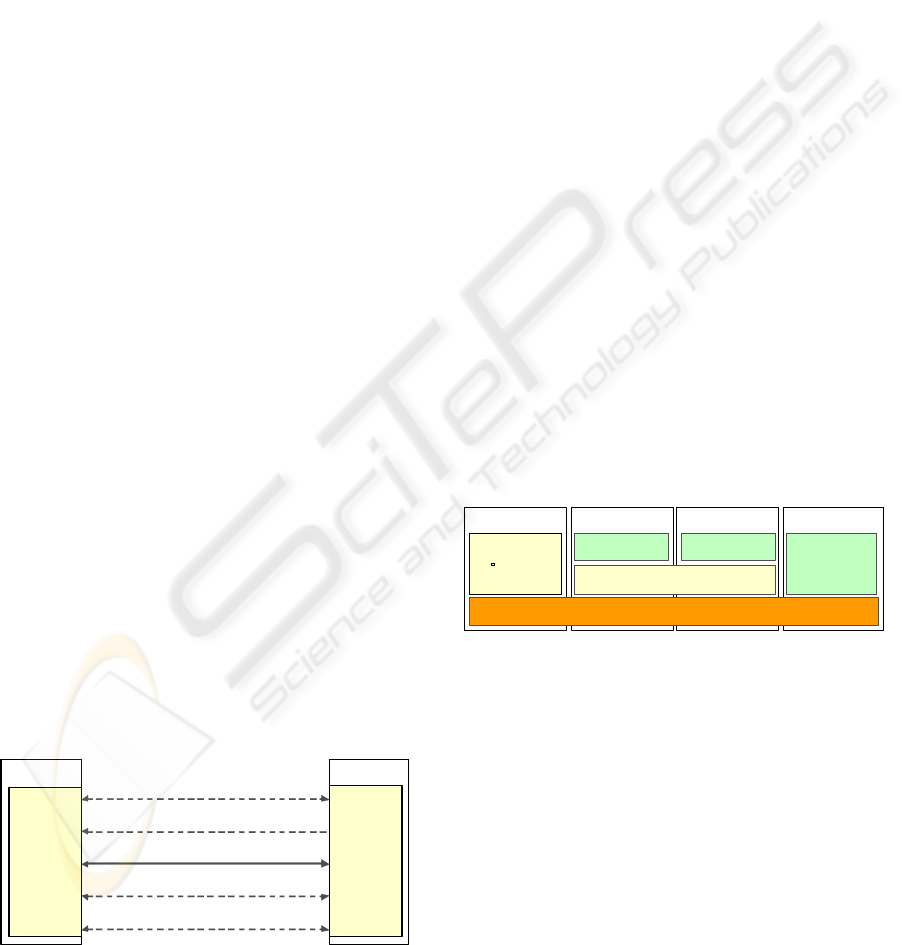
Within the SMErobot™ project, robotics PnP is
one of the major research topics (Nilsson et.al.,
2005, Naumann et.al., 2006). In this project, several
levels and aspects for Plug’n’Produce were
identified as depicted in Figure 1.
On the application level, we can consider each
device as a provider of certain functionalities, which
we also could call as services. These services have
to be combined to compose an application level
service that can be used to carry out the desired task.
In order to obtain the appropriate services, the
devices, including any control units, must be
configured accordingly. The single services must be
assigned with the right parameters. Finally, on the
communication level, the parties have to agree on
which protocols are to be used. To achieve PnP,
there must be a standardized mechanism for the
configuration and for the establishment of the
communication. The communication protocol must
be also standardized. In this way, there will be no
need to implement the communication interface for
different devices each time when you get a new
device, or connect an existing device to another
control unit.
Human
operations
Task
descript i
on
Wo rk -piece
data/m odel
Contr ol
ser v ices
Equipment
inte rfaces
Production
st rat egy
Process
da ta/ mo del
Interaction
devi ces
Task definition
Ap plic ation
le vel P nP
C on fi gur ation Pn P
Communication PnP
QoS
Wo rk -c el l i nformatio n
pr ocess in g ( ha rdw a re
& comp lex so ftw are )
Figure 1: Aspects and Levels of Robotics PnP according
to SMErobot™.
235
Dai F. and Unger J. (2008).
TOWARDS A STANDARDIZED AND EXTENSIBLE MECHANISM FOR ROBOT DEVICE INTEGRATION - A XIRP-based Approach and Test Bed
Implementation.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics, pages 235-241
DOI: 10.5220/0001504502350241
Copyright
c
SciTePress

In this paper, we will focus on the lower levels,
thus the communication and configuration levels.
Our approach is based on the general concept of
XIRP – the XML-based Interface for Robots and
Peripherals (VDMA 2006, Gauss et. al. 2006). XIRP
is a recommendation that was published by the
German standardization institute DIN in 2006. It
specifies a standardized mechanism and the
corresponding communication protocol for robot
device integration. Our experiences with XIRP-
based implementations have shown its big potential
to support robotics PnP on the communication and
configuration levels.
Within the European project SMErobot
™ (Plug
and Produce work package), the project partners are
working corporately on a revised XIRP version, also
defined as XIRP version 1.1 or XIRP+. This paper
introduces our approach that was partly our
contribution to XIRP+, and discusses our
experiences made on test-bed implementations.
Finally, we will describe our view on the integration
of different communication concepts and standards
to support robotics PnP.
2 THE APPROACH
2.1 Application Model
In an automation environment, there are basically two
roles: control units and peripheral devices. This can be
compared with the control points and the services in the
context of UPnP. Depending on the application
scenario and how the user configures the whole system,
each device can theoretically take both of these roles.
However, in a robot work cell, the control unit is
usually the robot or the cell controller.
For the control unit, a device providing certain
services can be seen as a logical unit with three
types of functions:
-
connection
-
execution of commands
-
exchange of data
This is independently from the complexity of a
device. It can also consist of several physical devices
that in their turn can be connected in any form to
provide a more powerful service.
This view is common both for service-oriented
or client-server communication models. There is no
clear separation between both. However, we don’t
emphasize the concept of loosely-coupled client-
server relationship. We use the client-server model
and combine it with the discovery methods of
service-oriented concepts.
A co mp lex
(vision ) sensor system
A s impl e
(visio n) sensor
co nnectio n
commands
data
A co mp lex
(vision ) sensor system
A s impl e
(visio n) sensor
co nnectio n
commands
data
Figure 2: Relation between control units and devices.
In our client-server model, there is a defined
relationship between two parties during runtime.
One party, typically the robot controller, is a master
of the application during the whole session. It
provides a better overview of the coherences
between services, and allows easier management of
the logical structure in an automation world,
especially in an industrial robot application. Service-
oriented approaches have the potential for flexibility
and upwards scalability, which can be beneficial for
large scaled, distributed environments. But dealing
with robotic cells for small and medium-sized
enterprises (SME), it is important to have
controllable structure, other than scalability.
Furthermore, the real-time efficiency is also
essential for robot-device communication.
2.2 Protocol Stack
Figure 3 shows the communication stack of XIRP
devices according to the ISO/OSI reference model
from ISO/IEC 7498-10.
Although XIRP does not specify Ethernet for the
physical layer, it is recommended to use IP over Ethernet.
The standardized protocols like TCP, UDP or HTTP can
be used on the session layer to handle the reliable or
unreliable transport of communication packages.
The message presentation uses XML, whereas
XIRP specifies the basic structure of the messages, like
SOAP does for Web services. But XIRP messages
have less overhead so that it is much more efficient.
Metadata as required in the SOAP messages are not
required for XIRP, as XIRP presumes, that metadata
are exchanged during the device configuration phase, if
they are not available before that.
C lie nt
Ser ver
Application
Robots, Sensors,
Vision Systems
Presentation XML
(U
TF
8
e
n
co de d)
Ses s ion/T ran sp or t T
C
P
/
U
DP
/
HTTP
Network
I
P
Data Link
(
E
t
h
e
rn
et
)
Physical
(
E
t
h
e
rn
et
)
Application
Presentation
S ess i on / Tr an sp o r t
Ne twork
Data Link
Physical
La
y
er 6
La
y
er 4/5
L
aye
r
3
L
aye
r 2
L
aye
r 1
L
aye
r
7
Figure 3: Protocol stack.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
236
There are basically three types of messages that a
client device can send to a server device: commands or
requests for getting and setting property values. XIRP
specifies the structure of these messages and the
corresponding reply messages. On top of the basic
specification, device type or application domain
specific agreements can be defined.
2.3 Communication Channels
When connecting two devices, one device takes the
role of the client and the other one the role of the
server. The main communication channel (command
channel) allows the client to “control” the server by
sending command messages, which triggers the
execution of an action (command) on the server
device, or getting and setting the value of properties
on the server.
To enable the PnP integration of devices,
automatic discovery via UDP multicast is supported
like in UPnP, but XML is used for the message
representation without the SOAP overhead.
Similarly, device and service descriptions and other
files can be retrieved via HTTP. It is furthermore
possible to transfer files from a client device to a
server device via HTTP.
A client device can subscribe individual events by
sending a subscription message to the server over the
command channel. If the server device confirms the
subscription, the client device will receive these events
on the event channel. In addition a XIRP client can also
send events to a server device. Before an event can be
sent, the client announces it to the server via the
command channel, so that the server can be prepared to
receive the event on the event channel.
In robotics applications there is also demand for
the periodical transmission of data on a defined rate
and under some time constraints. This can be done
via a periodic channel. Similar to event subscription,
periodical data are also subscribed (for receiving) or
registered (for sending) using appropriate messages
on the command channel.
Device
Periodic C hannel (TC P/UDP)
Even t Cha nne l (T CP)
Comma nd Ch annel (TCP )
Fi le C ha nnel ( HTT P, Po rt 80 )
Discovery Channel (UDP, Port 6800)
Device
Client Server
Figure 4: Communication channels.
Most robotics applications nowadays can be
supported using these communication channels. For
applications that have special requirements, we also
allow the creation of additional channels via the
command channel. These channels would use other
standardized protocols. One example is the time
synchronization channel that can use the PTP
(Precision Time Protocol) protocol of IEEE 1588, to
adjust the clocks in a distributed system and create a
common time basis. A binary channel using a
standardized binary transfer protocols could be also
created, even when binary data can be embedded
into XML messages using Base64 coding and
transferred via the above mentioned standard
channels too. These additional channels and the
corresponding protocols have to be specified in the
description of the devices, and can only be used, if
both sides of a communication session support them.
2.4 Device Profiles
The definitions described in the XIRP specification
are specified as mandatory or optional agreement.
Mandatory definitions have to be implemented as
specified. Optional agreements don’t have to be
supported, but if such a definition is implemented, it
has to be done according to the XIRP specification.
Furthermore, the definitions are grouped into so-
called device profiles and organized into Basic
Profile, Class Profiles and Custom Profiles as
depicted in Figure 5.
Bin PickingPart Identification Motor Inspection Seam Tracking
Class Profile
Sea m Trac king
Cl a ss P r o fi l e
2D Image Processi ng
Custom Profile
Part R ec og nit i on
Custom Profile
Motor Inspection
Basic Profile
General Agreements
Custom Profile
Bin Picking
Figure 5: Device profiles.
The Basic Profile contains general agreements
that are mandatory for all devices that claim
conformity to the XIRP specification. It specifies the
basic commands for the connection establishment
and parameters for the control of common functions
of XIRP-confirm devices. Also specified as general
agreements are aspects like
-
Schema and rules for description of devices
-
Supported communication channels
-
Basic structure of communication messages
-
Message synchronization
-
Termination of communication messages
-
Language selection for comments
-
Parameters for connection management
TOWARDS A STANDARDIZED AND EXTENSIBLE MECHANISM FOR ROBOT DEVICE INTEGRATION - A
XIRP-based Approach and Test Bed Implementation
237

-
Connection establishment
-
Primitive data types
-
Rules for extensions
To run applications, additional agreements on
commands and parameters are needed. Those are
specified in the class or custom profiles. Definitions
in a class profile are only mandatory for devices that
claim conformity to this device class, which could
be smart cameras, laser trackers, complex vision
systems, etc. Devices that conform to a certain class
profile should be exchangeable without affecting the
execution of an existing application, if no custom
profile is used in addition. Otherwise, a smooth
replacement of devices is not ensured.
Custom profiles can extend the general
agreements and class profiles with additional
commands and parameters that are needed to run a
specific application. They do not represent a
standardized specification, but have to conform to
the specifications in the General Agreements. If an
application can be implemented with existing device
class profiles, no custom profile should be defined
and used in addition.
Preliminary, a communication profile for a new
device, or a set of device functions, which has not
been defined in a class profile
yet, can be defined as
a custom profile and submitted to the XIRP working
group as a proposal for standardization. For a certain
time slot the preliminary profile will be put up for
discussion and then released as a standardized class
profile.
2.5 Protocol Schemas
Commands and data type definitions, as well as
definitions for message structure are specified as
XML schemas, which can be stored in one or several
files. A device can refer to multiple schema files as
long as they do not contain conflicting definitions.
The benefit of using the standardized XML Schema
format for these definitions is that the files can be
interpreted with validating XML parsers and created
with common XML tools.
2.6 Device Description
Each device must be supplied with a device
description. It contains the general information about
a device and is stored in a XML file. The contents
are:
-
The XIRP version
-
the unique device identifier (or name)
-
the type classification for the device
-
the category classification for the device
Optionally, it can also contain:
-
a textual description of the device
-
the user interface URL of the device
-
custom or device class schemes associated
with the device
-
the selection of languages that are
supported by the device for the comments
on commands and parameters in the
configuration files
-
The collection of communication channels
that are supported by the device.
Following is an example for a device
description:
<?xml version="1.0" encoding="UTF-8" ?>
<Description Version="1.1">
<Name>TestDevice</Name>
<Vendor>MyVendor</Vendor>
<Model>MyModel</Model>
<Class>SmartCamera</Class>
<Url>127.0.0.1</Url>
<Schemes>
<Schema Path="Camera.xsd" />
<Schema Path="Calibration.xsd" />
<Schema Path="Contour.xsd" />
</Schemes>
<Languages>
<Language Code="en" />
<Language Code="de" />
</Languages>
<Channels Url="127.0.0.1">
<Discovery />
<File Port="80" />
<Command Port="3002" />
<Event Port="3003" />
<Cyclic Protocol="UDP" Port="3004"/>
</Channels>
</Description>
The device description is an important element
for PnP, and can be used to automatically establish
connection and configure the communication and
programming setting.
2.7 Plug’n’Produce
When talking about PnP, we mean the ability to use
a device after plugged it onto the network, without
the need of manually setting communication
parameters or configure the interfaces. As indicated
in previous sections, the key elements for PnP are:
the device description, the corresponding schema
definitions and the mechanism of connection
establishment.
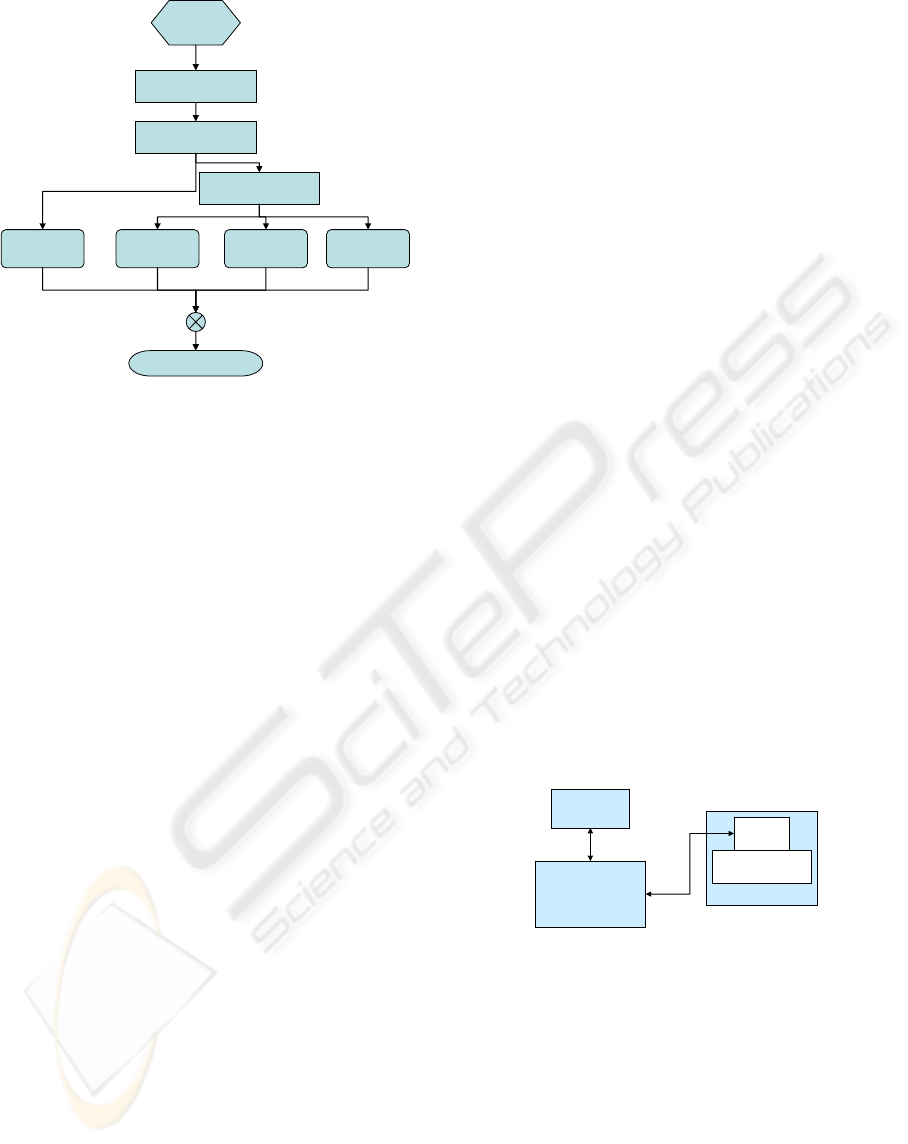
The following figure shows how PnP works in
our approach.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
238
Physically
connect the
device
Device
discovery & identification
Device description
Retrieval
Protocol schema
Retrieval
Preparing
Communication
settings
Preparing
Message
interpretation
Preparing
User
interface
Preparing
Programming
interface
Device ready to use
Figure 6: The PnP mechanism.
The discovery channel is the first mandatory
functionality of a device that supports PnP. After
physically connected the device to a control unit or
to the network of the work cell, the device will
announce it’s presence with a broadcast message via
the discovery channel. A control unit has to listen to
this broadcast channel, if it wants to be aware of
devices that are plugged-in. The other option is to
actively detect new devices by sending a discovery
message. Every PnP device would respond with a
unicast message to this control unit. In this way, the
amount of broadcast messages can be reduced to a
minimum during runtime of the robot cell, because
they are only sent as needed.
After device discovery, a control unit would be
able to identify the server devices and check, which
additional information are needed to establish the
connection to these devices. First of all, the device
descriptions must be made available to the control
unit. A PnP enabled device should have the device
description accessible via the file channel.
Alternatively, there could be also a repository of
device descriptions elsewhere. But the safest way to
provide compatible and up-to-date device
description is to provide it on the device itself.
With the device description, the control unit can
be prepared to establish the connection to the server
device. This means, the communication level PnP
would be done. The device can be connected
whenever it is needed for the application.
Configuration level PnP needs more information
than directly provided in the device description file.
But with the references specified in the device
description, the control unit can further retrieve the
schema files. Information provided with the schema
allows the control unit to configure the interpretation
of the communication messages. Also possible is to
create or update the user interface for application
programming based on the commands and data type
definitions in a schema.
3 TEST-BED
IMPLEMENTATIONS
Three test-bed implementations are described briefly
in this section. They represent three scenarios with
different requirements on robot-device
communication, so that the functionalities of the
different communication channels could be
demonstrated and evaluated.
3.1 Smart Camera
As an example for relatively simple, but intelligent
device, we used a smart camera from DVT (now
owned by Cognex) of the type Legend 510. This
camera has embedded image processing functions
and Ethernet link on-board. It can be configured and
programmed using a kind of scripting language via a
PC. Afterwards, the camera can be used stand-alone.
The device description file and corresponding
schema files are located on the camera, and are
automatically downloaded to the robot system via
the file channel (using HTTP). The robot system is
then automatically configured so that the commands
and variables defined in the schema file are
accessible for robot programming.
Robot controller
Smart camera
Embedded
Vision processing
XIRP
server
Smart camera
Embedded
Vision processing
XIRP
server
Teach
pendant
Figure 7: Smart camera test-bed.
In the sample application, a vision method for
blob finding and analysis is implemented on the
camera. It can be triggered from the robot system.
Results like number of objects found, and size and
position of each object can be read from the camera
using the "GetOnce" command. This data is used to
generate robot motion targets to pick up the objects.
The device and its properties as well as the
vision object data are automatically mapped to
variables in the robot programming language
RAPID. They can be used like other RAPID
variables on the teach pendant.
TOWARDS A STANDARDIZED AND EXTENSIBLE MECHANISM FOR ROBOT DEVICE INTEGRATION - A
XIRP-based Approach and Test Bed Implementation
239

3.2 The Chess Robot
The ChessRobot scenario, which has been presented
on the Hannover Fair 2007, was used for the
evaluation of XIRP-based PnP as well. In this
scenario, multiple XIRP server instances were
connected to the robot controller, using command
and event channels. The test-bed architecture is
illustrated in Figure 8. Figure 9 shows the setup on
the Hannover exhibit 2007.
The robot controller is the control unit in this
scenario. It controls two robot arms, each of them
playing two games – one against a visitor and the
other one against each other. The boards for the
games with visitors are observed by cameras. The
moves of the visitors are recognized using a vision
system, whereas a game engine checks the validity
of the visitor moves and generates counter-moved
for the robot. To test the concurrent communication
with several server devices, we used three instances
of XIRP server device running on three separate
PCs.
Robot controller
Server device 1 Server device 2 Server device 3
Chess
engine
Vision
system
Game
control
Game 1
(Robot 1 vs.
Visitor 1)
Game 1
(Robot 1 vs.
Robot 2)
Game 1
(Robot 2 vs.
Visitor 2)
Chess
engine
Chess
engine
Game
control
Vision
system
Chess
engine
Game
control
Figure 8: ChessRobot testbed.
Figure 9: ChessRobot on exhibition.
3.3 Safety Zone Supervision
Another test-bed application used cameras to
supervise the safety zone in the robot workspace. A
modified version of SIMERO (Gecks, Th., Henrich,
D., 2004) runs on a Linux PC and analyses the
spatial relation between human worker or moving
obstacles and the robot arm. Depending on the
spatial situation, it sends then adapted velocity data
to the robot so that the robot moves always safely.
For this purpose, a periodical channel is used to
transmit robot data to the vision system and the
updated velocity data to the robot controller. The
data exchange could be done in real-time with very
small jitters. In addition, the robot data are assigned
with timestamps so that correct mapping of spatial
data is possible.
4 DISCUSSIONS AND OUTLOOK
We implemented our XIRP-based approach for three
scenarios with different requirements. With the
smart camera test-bed, it has been shown that even
using scripting language, it is possible to implement
XIRP server on a low-cost smart device. PnP
worked with downloading the device description
from the camera. With the ChessRobot test-bed,
multiple server devices were connected to the robot
controller. Also the functionality of event
subscription could be demonstrated. The safety zone
supervision test-bed further evaluated the
subscription of periodical data for real-time
communication.
These examples have shown that the
implementation of XIRP protocol doesn’t require
much computation resources. The approach works
both for simple intelligent devices and PC-based
systems.
This approach is control unit centric, with clear
controller-device relationship. This is also the
typical case for SME scenarios. Even though, the
XIRP-based architecture is also scalable to support
scenarios with multiple clients and servers, we
haven’t tested our approach with large-scaled
distributed environments. Because of the nature of
this kind of client-server model, it has limitations
with flexibility and scalability in terms of
distributed, large-scaled environments.
When considering distributed environment
without real-time constraints, Web services
approaches have big potential. We are the opinion
that a hybrid approach would better fulfil the
different requirements rather than trying to
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
240
implement one protocol for all cases. Furthermore,
we observe progresses in the standardization of
communication protocols on the field device level
like EtherCAT and OPC UA. Also considering that
XIRP might be still too complex for simple I/O
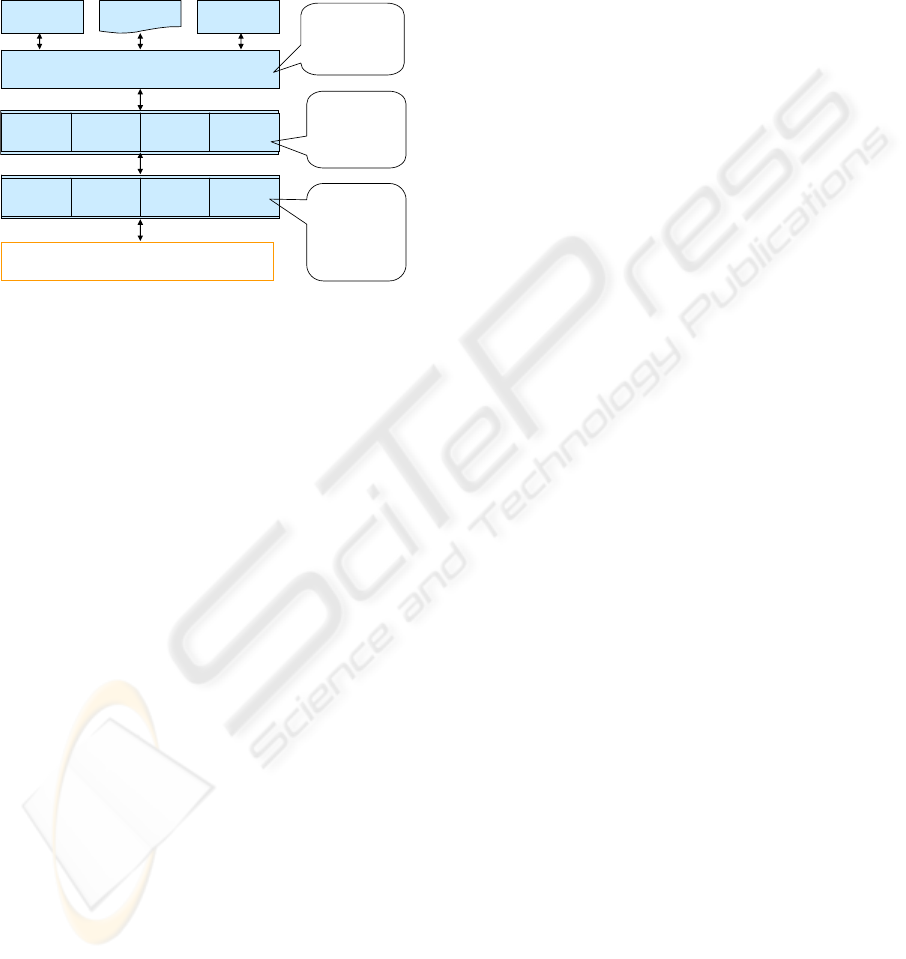
devices, it is proposed to develop an integration
framework that supports different protocols.
teach pendant
robot program
robot controller
modules
Robot device interface control
(unified data structures and interfaces)
XIRP UPnP OPC UA …
TCP UDP HTTP …
XIRP UPnP OPC UA …
TCP UDP HTTP …
devices
(connection, commands, data)
Configurable
and extensible
to support
different device
protocols
Configurable
and extensible
to support
different
networking
protocols
Interface to
different
domains of the
robot system
Figure 10: Device integration framework.
Certainly, a careful selection of the protocols
should be done so that they really complement each
other. Figure 10 only shows the principle and
doesn’t mean any preferences of protocol selection.
To have different kind of devices running
different protocols concurrently with minimal
implementation and processing overhead, we have to
find the common features of the selected
approaches. Also to be investigated are the
boundaries of each protocol. Based on the
investigations, recommendations for the users
respectively application engineers can be worked
out.
It is very hard, or even impossible to make a
standard that fits to everyone’s needs. But a
selection of standards, a common understanding of
the methods and some guidelines or
recommendations would help the users, especially
SME’s to apply robotics PnP.
ACKNOWLEDGEMENTS
This work has been partly funded by the European
Commission’s Sixth Framework Program under
grant no. 011838 as part of the Integrated Project
SMErobot
™.
REFERENCES
Nilsson, K., Johansson, R., Robertsson, A., Bischoff, R.,
Brogårdh, T., Hägele, M., 2005: Productive robots
and the SMErobot™ project. Third Swedish
Workshop on Autonomous Robotics, Stockholm,
September 1-2, 2005.
Naumann, M., Wegener, K., Schraft, R.D., Lachello, L.,
2006: Robot Cell Integration by Means of
Application-P’n’P. In: Proceedings of the Joint
Conference on Robotics, May 15-17, 2006, Munich
Gauss, M., Dai, F., Som, F., Zimmermann, U.E., Wörn,
H., 2006: A standard communication interface for
industrial robots and processor based peripherals -
XIRP, In: Proceedings of the Joint Conference on
Robotics, May 15-17, 2006, Munich.
VDMA, 2006: XML-basiertes Kommunikationsprotokoll
für Industrieroboter und prozessorgesteuerte
Peripheriegeräte (XIRP), VDMA 66430-1:2006-07,
2006
Gecks, Th., Henrich, D., 2004: SIMERO: Camera
Supervised Workspace for Service Robots. In:
Proceedings of ASER 2004, 2nd Workshop on
Advances in Service Robotics, Feldafing, Germany,
20-21 May 2004
TOWARDS A STANDARDIZED AND EXTENSIBLE MECHANISM FOR ROBOT DEVICE INTEGRATION - A
XIRP-based Approach and Test Bed Implementation
241
