
PLUG-AND-PRODUCE TECHNOLOGIES
On the Use of Statecharts for the Orchestration of Service Oriented Industrial
Robotic Cells
Germano Veiga and J. Norberto Pires
Mechanichal Engineering Department, University of Coimbra
Rua Luís Reis dos Santos, Coimbra, Portugal
Keywords: Service Oriented Architectures, SCXML, Industrial robotic cells.
Abstract: Programming industrial robotic workcells is a challenging task, namely because it means dealing with
several types of machines, mange the data flow between them and orchestrate their basic functionality into a
working program. In this work service oriented architectures are used for the task of programming robotic
workcells along with managing the communication between cell components, and a statechart model engine
is implemented to orchestrate the system logic. The objective of this paper is to focus in merging service
oriented architectures with StateCharts XML, and in evaluating that robotic workcell programming
approach using a simple laboratory test bed.
1 INTRODUCTION
The integration of different components in an
industrial robotic cell is a time consuming task.
Nowadays, industrial automation is using
technologies originally designed for wider range of
non-traditional industrial companies. The evolution
of vision systems, 3D scanners, intelligent sensors
PLC’s, with their special languages and
programming environments, etc., originated an
enormous collection of interesting and powerful
devices which are easier to program, although harder
to integrate in their full extent. Consequently,
porting plug-n-play concepts from PC’s to the
industrial automation environment is a promising
opportunity. Even though similar to plug-n-play, in
many aspects, the plug-n-produce concept (Veiga et
al. 2007) has to deal with some specifics from the
industrial automation world. One of these specifics
is related with the presence of many highly
programmable devices. Considering an industrial
robotic cell, connecting a sensor to a robot controller
can be compared to connecting a mouse to a PC, but
integrating a programmable vision system or a PLC
with an industrial robot requires some orchestration
logic. To materialize this plug-n-produce concept
regarding highly programmable devices, service
oriented architectures (SOA) have been pointed as a
promising approach (SMErobot
TM
2007-2009).
service oriented architectures are composed by
autonomous services and are extensively event
driven.
Finite-state automatons are very commonly used
in the task of modeling the behavior of industrial
automation systems. Due to their discrete event
nature, industrial systems are well described by
states and event driven transitions.
Harel StateCharts are a widely used extension to
the finite-state automata model, and SCXML
(Barnett et al. 2007) is a modern standardized way
of specifying them.
The purpose of the current paper is to evaluate a
SCXML-derived language to program service-
oriented industrial robotics cells. This paper also
presents a software application that materializes this
concept, and the results obtained using a simple
laboratory robotic test bed.
2 SOA - UPNP
With the advent of internet, service oriented
architectures (SOA) emerged to increase the degree
of decoupling between software elements. A SOA
relies on highly autonomous but interoperable
systems. The definition of a service is ruled by the
larger context; this means that all technological
details are hidden, but also that the concept which
271
Veiga G. and Norberto Pires J. (2008).
PLUG-AND-PRODUCE TECHNOLOGIES - On the Use of Statecharts for the Orchestration of Service Oriented Industrial Robotic Cells.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics, pages 271-277
DOI: 10.5220/0001505102710277
Copyright
c
SciTePress

supports the service is more business (or process)
oriented (instead of being technology oriented).
SOA enables software engineers to focus more on
the business logic and less on the interconnection
details. At the device level, service-oriented
architectures are emerging as the way to deal with
the increasing amount of embedded devices present
in our homes and offices.
In manufacturing, the inherent complexity
(necessarily hidden from the user) associated with
the presence of many types of devices and machines
makes the concept of service-oriented architectures
particularly attractive (SIRENA 2005, SODA 2006,
SOCRADES 2006). In fact, it leads to the idea that
each workcell programming block (that is, not only
physical devices) should be considered as a potential
device (SOA device style) that offers programming
services.
Considering a holonic workcell structure (Gou,
1998), with holons composed by automation
devices, like an industrial robot or a vision system,
one can classify as uncommon the need to have real-
time in the communication framework. The majority
of the component connections can instead be
described in terms of coarse-grained services, with
synchronous calls for setup and asynchronous events
for operation.
Considering an industrial robotic cell ecosystem,
past work (Veiga et al, 2007) revealed that service-
oriented architectures can provide a suitable
platform to a plug-n-produce environment.
Nevertheless, there are several approaches to
SOA, namely, if we consider only the four most
relevant platforms: Jini (Jini 2006), UPnP (UPnP,
2007), DPWS (Chan, 2006) and DSSP (Nielsen,
2007).
Jini is an architecture proposed by Sun
Microsystems based on Java. This fact makes it
platform independent but language dependent. It
also carries a large memory footprint, due to the
presence of a virtual machine and extensive
libraries, making it less appropriate for very small
devices.
UPnP and DPWS rely extensively on standard
network protocols such as TCP/IP, UDP, HTTP,
SOAP, XML, and the web technology. This makes
them platform and language independent, which is a
major advantage for their adoption. XML formats
are broadly used and accepted and provide modern
data interchange mechanisms and communications.
Their style is close to the one defined in the
enterprise world with the pair WSDL/SOAP.
Although similar in many aspects, the UPnP and
DPWS architectures use different languages for
device description and different protocols for
discovery and event notifications. There is an
enormous dynamics around DPWS. Nevertheless,
the new Microsoft operating system, Microsoft
Vista, supports both technologies under the name
plug-and-play extensions for Windows (PnP-X,
2006)
DSSP is a simple SOAP-based protocol that
defines a lightweight, REST-style service model
(Nielsen, 2007) that also relies extensively on web
technology. Paired with concurrency and
coordination runtime (CCR) it constitutes the major
parts of the Microsoft Robotics Studio (MSRS)
platform.
DSSP architecture style is radically different
from the WSDL/SOAP model. UPnP and DPWS are
very similar technologies which mean that concepts
and design styles can be easily ported between each
other.
In this work UPnP was selected due to
representativeness of the platform, the quantity and
quality of the tools available, and our experience
with the UPnP based services.
3 SCXML
StateChart XML (SCXML) can be described as an
attempt to render Harel StateCharts in XML. The
aim of this standard is to provide a basis for future
standards in the area of multimodal dialogue
systems. Even though this effort is being carried by
the W3C group for voice technologies, SCXML
provides a generic state-machine based execution
environment and a modern (XML) state machine
notation for control abstraction. In fact, SCXML is a
candidate for control language within multiple
markup languages coming out of the W3C.
Harel StateCharts are an extension to finite-state
automata. These extensions are needed in order to
make finite-state automata useful, and they include:
Hierarchy
– StateCharts may be hierarchical, i.e.,
a state may contain another statechart down to an
arbitrary depth.
Concurrency
– Two or more statecharts may be
run in parallel, which means that their parent state is
in two states at the same time.
History
– A state holds information that allow a
“pause and resume” behavior.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
272
Consider for example the microwave oven model
presented in Figure 1.
Figure 1: Microwave oven (Adapted from Barnett et al
2007).
The equivalent SCXML specification is:
<?xml version="1.0"?>
<scxml xmlns=
"http://www.w3.org/2005/07/scxml"
version="1.0"
initialstate="off">
<state id="off">
<!-- off state -->
<transition event="turn_on">
<target next="on"/>
</transition>
</state>
<state id="on">
<initial>
<transition>
<target next="idle"/>
</transition>
</initial>
<onentry>
…
</onentry>
<transition event="turn_off">
<target next="off"/>
</transition>
<transition cond="${timer ge
cook_time}">
<target next="off"/>
</transition>
<state id="idle">
<transition
cond="${door_closed}">
<target next="cooking"/>
</transition>
<transition event="door_close">
<assign name="door_closed"
expr="${true}"/>
<target next="cooking"/>
</transition>
</state>
<state id="cooking">
…
</state>
</state>
</scxml>
Has it can be seen in this example, an SCXML
statechart can be divided in two major parts: the first
composed by the machine states and correspondent
transitions, and the other composed by the
executable content.
The SCXML executable content consists of
actions that are performed as part of taking
transitions and entering and leaving states. The
executable content is responsible for the
modification of the data model, for raising events
and invoking functionality on the underlying
platform. It’s worth noting that executable content
cannot cause a state change, or fire a transition,
except indirectly, by raising events that are then
caught by transitions. This separation in the
specification leaves room for platforms to add
additional executable content corresponding to
special features.
4 EXPERIMENTS
4.1 Experimental Setup
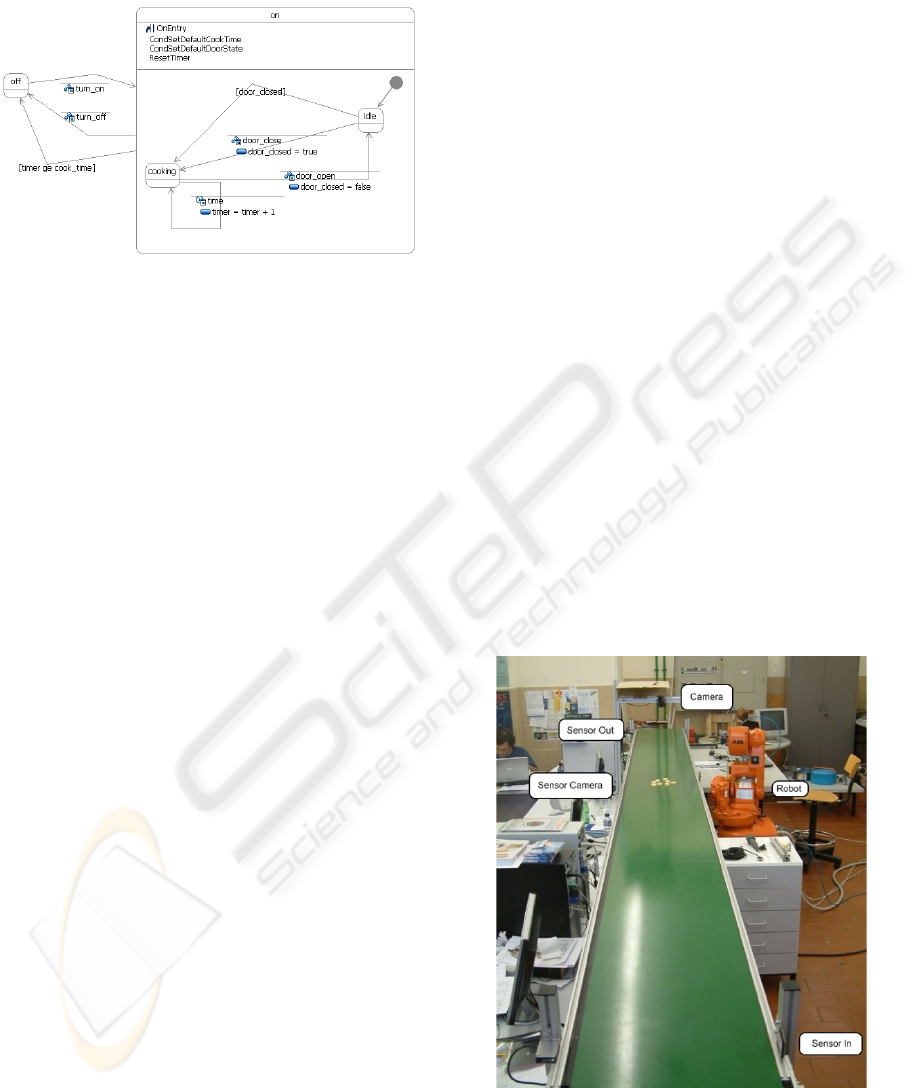
The robotic cell used in this demonstration is
composed of an industrial robot (ABB IRB 140),
equipped with the modern IRC5 controller, a
conveyor controlled by a PLC (Siemens S7-200) and
a USB web camera (Figure 2).
Figure 2: Equipment for experimental setup.
Basically, the conveyor transports sample pieces
over the machine vision system which calculates the
PLUG-AND-PRODUCE TECHNOLOGIES - On the Use of Statecharts for the Orchestration of Service Oriented Industrial
Robotic Cells
273

number and position of the pieces. The results are
sent to the robot controller to command the robot to
pick them from the conveyor and place them into a
box.
Two different applications were developed to
operate the cell: a speech interface and a PDA
interface.
4.2 Previous Work
In previous work (Veiga et al, 2007) this Industrial
Robotic cell test-bed was used in order to validate
SOA in a plug-n-produce environment. The cell
components were represented in the network by
UPnP devices that provided services as way to
expose their functionality (Figure 3).
Figure 3: UPnP Network of the industrial test-bed.
Five UPnP devices representing five workcell
components were developed. In some of these
devices an extra layer was needed because native
UPnP support could not be implemented. Detailed
description can be found in (Veiga et al, 2007).
The Cell Programmer Interface (Figure 4) is a
software application developed to control the flow of
high level tasks in a manufacturing cell. Basically,
it’s an UPnP control point, with some tools suitable
to build a generic stack. This stack represents the
control flow of process related tasks. In the left side
of this interface a tree shows all UPnP devices
founded on the network.
Clicking over them it is possible to get additional
information (access the presentation page, for
example). Using the “arrow” button, actions or
events are added to the stack. Furthermore, when
running the resulting program and the program
counter is pointing to an event, it means that the
program is “waiting” for that event to occur.
Inversely, if the program counter is pointing to an
action, it means that it is calling that action and
waiting for the return. There is also the possibility of
defining auxiliary variables to store values that can
be used as arguments in later stack steps.
4.3 Analysis
The simple stack approach revealed to be very
limited to handle more complex systems. These
systems often have concurrent tasks, multiple
transition events and many other orchestration
requirements which are impossible to model with a
simple stack system.
Figure 4: Simple orchestration system (Veiga et al, 2007).
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
274

To address this problem, this paper proposes a
more powerful orchestration model that relies on
standard technologies (SCXML) and solves many of
the described problems.
Another issue with the previous approach was
related with the use of the auxiliary variables and the
need to check the presence of remote functionality
on distributed systems. A robot cell program is only
valid if all the services needed are available, but also
if the used variables have the desired value. If this
value is obtained by previous steps it’s not possible
to check if that value is still valid (corresponding to
a live device, for example). To address this issue the
solution proposed only relies on UPnP state
variables to manage data, discarding the use of
auxiliary variables
4.4 Implementation
The software developed can be divided in two
distinct parts: the implementation of the statechart
engine; and the user interface itself.
4.4.1 StateChart Engine
Actually there are too few SCXML implementations
available, and the most notable effort is
CommonsSCXML (CommonsSCXML 2007). Since
CommonsSCXML is still in a 0.x version, and there
was the need to extend the standard functionality, it
was decided here to develop an SCXML engine
from scratch.
The application presented in this paper was
developed in C# following the guidelines of (Samek,
M. 2002) including the basic part of the SCXML
language. Considering the W3C standard (Barnett et
al. 2007), our implementation doesn’t include the
Extensions to the basic State Machine Model and the
Executable Content.
This approach was taken not only for simplicity
but also with the objective of keeping the cell
program as simple as possible. This objective of
simple orchestration programs is sustained by the
holonic cell structure referenced earlier, where
devices expose high-level functionality services and
the cell orchestration programs are reduced in terms
of flow control, managing data etc. As such, all
executable content within the cell orchestration
program is always related with processing UPnP
events or UPnP actions.
4.4.2 User interface
The UPnPSCXMLCellProgrammer is a graphical
user interface that allows the composition of
workcell orchestration programs relying on UPnP
devices and the SCXML derived model (Figure 5).
To behave like this the StateChart engine has the
added capability to recognise whether an event or
executable content are UPnP or not.
When the engine gets an UPnP event it converts
it into an SCXML event. When the statechart engine
finds an UPnP action inside an executable content
block it just calls that action with the parameters
(UPnP arguments) enclosed.
Figure 5: UPnPSCXMLCellProgrammer Interface.
PLUG-AND-PRODUCE TECHNOLOGIES - On the Use of Statecharts for the Orchestration of Service Oriented Industrial
Robotic Cells
275

In this application the user can drag and drop
UPnP actions and UPnP events from the UPnP
network and place them into the SCXML program.
It’s worth noting that the events in this program are
always network events, and that only UPnP actions
can be assigned to the OnEntry and OnExit handlers
and to the executable content of the transitions,
which are executed between the OnExit handler of
the source state and the OnEntry handler of the
current state.
UPnP events and UPnP actions are defined by
their complete Unified Resource Name (URN) that
includes the name of the action or service, plus the
URN of the owning service, plus the URN of the
device.
5 EXPERIMENTS AND RESULTS
The test bed used to experiment this new approach
that merges UPnP with SCXML is the same used
previously (Figure 2). The program logic is a little
bit more complex with the objective to show some
of the new possibilities (Figure 6).
Figure 6: Program statechart.
In fact, the new program logic allows the user
to give alternatively speech commands or PDA
commands, and re-picking leftovers before asking
the conveyor to run again.
In comparison with the previous situation much
more complex orchestration schemes can be
obtained. Statecharts provide a very nice way to
model systems logic but are very limited when
dealing with data processing. With this combined
approach pairing statecharts with SOA all data
processing is made within SOA, leaving statecharts
for modeling systems states and logic. Considering
the experiments made so far we can point statecharts
as a suitable model to orchestrate holonic
automation workcells, due to their capabilities in
dealing with events and states in opposition of
dealing with data processing.
6 CONCLUSIONS
This paper reports results from an ongoing research
work. Experiments done so far revealed that the
added features enable the cell programmer to define
powerful and more complex orchestrations that can
handle complex systems.
Consequently, merging service oriented
architectures with statecharts proved to be an
interesting approach to model the workcell
orchestration logic. Future work will focus on the
evaluation of this approach with more complex
systems and in providing a more user friendly
graphical interface.
ACKNOWLEDGEMENTS
This work has been mainly funded by the European
Commission’s Sixth Framework Program under
grant no. 011838 as part of the Integrated Project
SMErobot
TM
.
REFERENCES
Abb, 2005 ABB IRC5 Documentation, ABB Flexible
Automation, Merrit, 2005
Ahn S. C., Kim J.H., Lim K., Ko H.,Kwon Y and Kim H.,
2005 UPnP Approach for Robot Middleware P
Proceedings of the 2005 IEEE International
Conference on Robotics and Automation Barcelona,
Spain, April 2005.
Barnett, J. et al, 2007. State Chart XML (SCXML): State
Machine Notation for Control Abstraction.
http://www.w3.org/TR/2007/WD-scxml-20070221/
Chan, S., Conti, D., Kaler, C., Kuehnel, T., Regnier, A,
Roe, B., Sather, D., Schlimmer, J., Sekine, H., Thelin,
J., Walter, D., Weast, J., Whitehead, D., Wright, D.,
and Yarmosh, Y. (2006). "Devices Profile for Web
Services."
http://schemas.xmlsoap.org/ws/2006/02/devprof/
CommonsSCXML, 2007, available from:
http://jakarta.apache.org/commons/scxml
James, F. and H. Smit ,2005 Service Oriented Paradigms
for Industrial Automation. In: IEEE Transactions on
Industrial Informatics, Vol. 1, no. 1 February 2005.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
276

Gou L., P. Luh, and Y. Kyoyax (1998). Holonic
Manufacturing Scheduling: Architecture, Cooperation
Mechanism, and Implementation. '97., IEEE/ASME
International Conference on Advanced Intelligent
Mechatronics Vol 37, 213-231,
Harel D. 1987. StateCharts: A Visual Formalismfor
Complex Systems. Science of Computer Programming
8, North Holland.
Nielsen, H. and G. Chrysanthakopoulos. (2007)
Decentralized Software Services protocol – DSSP/1.0
PnP-X (2006): Plug and Play Extensions for Windows
Specification. Available:
www.microsoft.com/whdc/Rally/pnpx-spec.mspx.
Samek, M. (2002). Pratical StateCharts in C/C++,
CMPBooks
Schlimmer J., S. Chan, C. Kaler., T. Kuehnel, R. Regnier,
B. Roe, D. Sather, H. Sekine, D. Walter, J. Weast, D.
Whitehead, and D. Wright (2004) Devices Profile for
Web Services: A Proposal for UPnP 2.0 Device
Architecture.Available:
http://xml.coverpages.org/ni2004-05-04-a.html.
SIRENA Project (2005), Service Infrastructure for Real-
time Networked applications, Eureka Initiative ITEA.
Available: www.sirena-itea.org.
SOCRADES. (2006). "Service-Oriented
Cross-layer infRAstructure for Distributed smart
Embedded devices." http://www.socrades.eu/
SODA. (2006). "Service Oriented Device and Delivery
Architecture." http://www.soda-itea.org/
UPnP forum (2004).Available: http://www.upnp.org
Veiga G., Pires JN, Nilsson K.. On the use of SOA
platforms for industrial robotic cells: Intelligent
Manufacturing Systems Proceedings IMS2007, Spain,
2007
SMErobot
TM
(2007-2009), The European Robot Initiative
for Strengthening the Competitiveness of SMEs in
Manufacturing, www.smerobot.org
PLUG-AND-PRODUCE TECHNOLOGIES - On the Use of Statecharts for the Orchestration of Service Oriented Industrial
Robotic Cells
277
