
CONCEPTS FOR AUTONOMOUS COMMAND AND CONTROL
Fernando Escobar and John McDonnell
Innovation center, Spawar sys ctr – San Diego, San Diego, CA 92152, U.S.A.
Keyword: Autonomous, Unmanned Systems, Self Organizing, MANET, Operational Orders, Multi-objective
Optimization.
Abstract: The new Department of Defense (DOD) transformational doctrines for future battlefield operations
emphasizes the need to more aggressively pursue program developments with unmanned systems
technologies. Currently, there are ongoing Battle Experiments testing and assessing the operational
performance of these technologies. These experiments in turn are uncovering current and future capability
gaps that need to be fulfilled with aggressive research, engineering, test and evaluation. The Innovation
Center at SPAWAR Systems Center, San Diego, has established a research and development process to
better address Future Naval Capability gaps in the areas of both, Intelligent Autonomy and Autonomous
Command and Control for Unmanned Systems. In this paper we report our research on two important
components concepts for AC2: 1) Autonomous Resource Allocation, 2) Autonomy and Commanders Intent,
and 3) A discussion on Self organizing C2.
1 INTRODUCTION
Sea Power 21 is a Naval vision that seeks to
transform defense processes and modernize
technologies for the battlefields of the future. The
greatest challenges to transforming Naval doctrines
from the industrial age to the information age has
been the development of a clear notion of the value
that distributed command architectures bring to
modern combat Fig1. Distributed command
architectures bring increased update speed of
situational awareness. Each modernization step in
C4ISR technology that enables faster horizontal
integration is one step closer to a fully distributed
command structure allowing for near real-time
transmission of intent from the Commander on
downwards resulting in better Situational Awareness
of the Battlefield. Intention awareness is therefore an
integral part of distributed command architecture
and must be properly established in the information
environment where faster and optimum execution of
mission objectives is needed.
The fundamental infrastructure e
nabling
command and control (C2) is undergoing a
revolutionary change. The assumptions embedded in
traditional C2 such as a centralized decision
authority and well-defined hierarchy are being
reassessed, especially in light of mission areas that
involve coalition operations and the emergence (and
dependence) on a ubiquitous IT capability (Alberts,
2007). While moving away from traditional C2 to a
net-centric environment represents unique
challenges, the prevalence of unmanned systems
must also be considered within the context of
emerging architectures and concepts. If properly
architected, unmanned C2 systems should meld
seamlessly into the operational environment
augmenting and working in concert with C2 for
manned units. Most investment in autonomy is being
made at the platform level. This work focuses on the
next level of autonomy- that is, the autonomous
interaction of autonomous platforms to achieve pre-
specified objectives.
The DoD Definition for C2 i
s given (Joint
Publication, 2002) as the exercise of authority and
direction by a properly designated commander over
assigned and attached forces in the accomplishment
of the mission.
Autonomous i
s defined as not controlled by others or
by outside forces; independent and independent in
mind
or judgment; self-directed.
Considering these definitions, Autonomous
C
ommand and Control (AC2) can be defined as the
independent, self-governed exercise of authority and
direction over the assigned forces in the
accomplishment of the mission.
322
Escobar F. and McDonnell J. (2008).
CONCEPTS FOR AUTONOMOUS COMMAND AND CONTROL.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics, pages 322-329
DOI: 10.5220/0001507403220329
Copyright
c
SciTePress

Figure 1: Unmanned Systems in DODs Transformational Information Architecture. (http://www.army.mil/fcs/).
Figure 2: Autonomous Command & Control (AC2) for Self Organizing Unmanned Systems.
The prevalence of unmanned systems has increased
dramatically across the DoD services in recent
engagements. In addition, user acceptance has
become well established over this time ensuring that
unmanned platforms will remain pervasive in future
conflicts. Recently released Master Plans for both
USVs (UUV, 2007) and UUVs (UUV, 2004) allude
to the need for autonomous group/cooperative
behavior to achieve the desired mission objectives
for these types of systems. Fig. 2 illustrates the self
organizing concepts of a disparate set of unmanned
platforms.
The capabilities required to achieve AC2 include:
• Self-Organizing C2
• Translate Commander Intent to Executable
Missions
• Autonomous Allocation and Management
of Resources
• Machine Learning from
Training/Experience
• Near Real-Time Analysis for predicting
future C2 actions
• Seamless Interoperability of C4ISR
Systems
CONCEPTS FOR AUTONOMOUS COMMAND AND CONTROL
323
• Sufficient BW and communications
• Autonomous Platforms and Sensing
• Level 3, 4 Fusion
The first three bullets are elaborated on in the
following sections. While critical to achieving AC2,
the remaining topics are advancing under a myriad
of other efforts. For example, the seamless
interoperability of C4ISR systems is being addressed
under next-generation C2 efforts which are focused
on providing a Service Oriented Architecture (SOA)
to the warfighter. In addition to architecture, mobile
add-hoc networks (MANET) are being studied to
determine the best methodologies to achieve self-
forming/self-healing networks and provide desired
QoS levels. Bandwidth utilization will continue to
improve with spectrum management, compressed
sensing, along with novel routing and radio
capabilities. Higher levels of sensor fusion are being
rigorously investigated in order to ascertain enemy
course-of-action analysis, turn data into
understanding and wisdom, and autonomously
improve sensor fusion capability. Autonomous
sensing is also in the critical path as that dovetails
with the allocation and management algorithms that
are incumbent in AC2. Finally, significant
investment continues in imbuing individual
platforms with autonomy and analyzing the benefits
of shared information/awareness.
2 SELF ORGANIZING C2
The key attributes of next-generation C2 include
agility, focus, and convergence (Alberts, 2007).
Agility is the ability of distributed platforms to self-
synchronize and organize into an appropriate C2
topology in a dynamic manner. Self-synchronization
will determine the decision rights across the
platforms, and, in effect, serve as part of the cost
function in the formation of the C2 topology. It is
imperative that any self-organizing C2 topology
yield deterministic behavior(s)
. The salient features
that should be used to automatically determine an
appropriate C2 topology remain to be discovered.
Intuitively, the decision space could include the
number of assets, the information capacity of the
assets, the connectivity bandwidth between assets,
and mission and environmental complexities. For
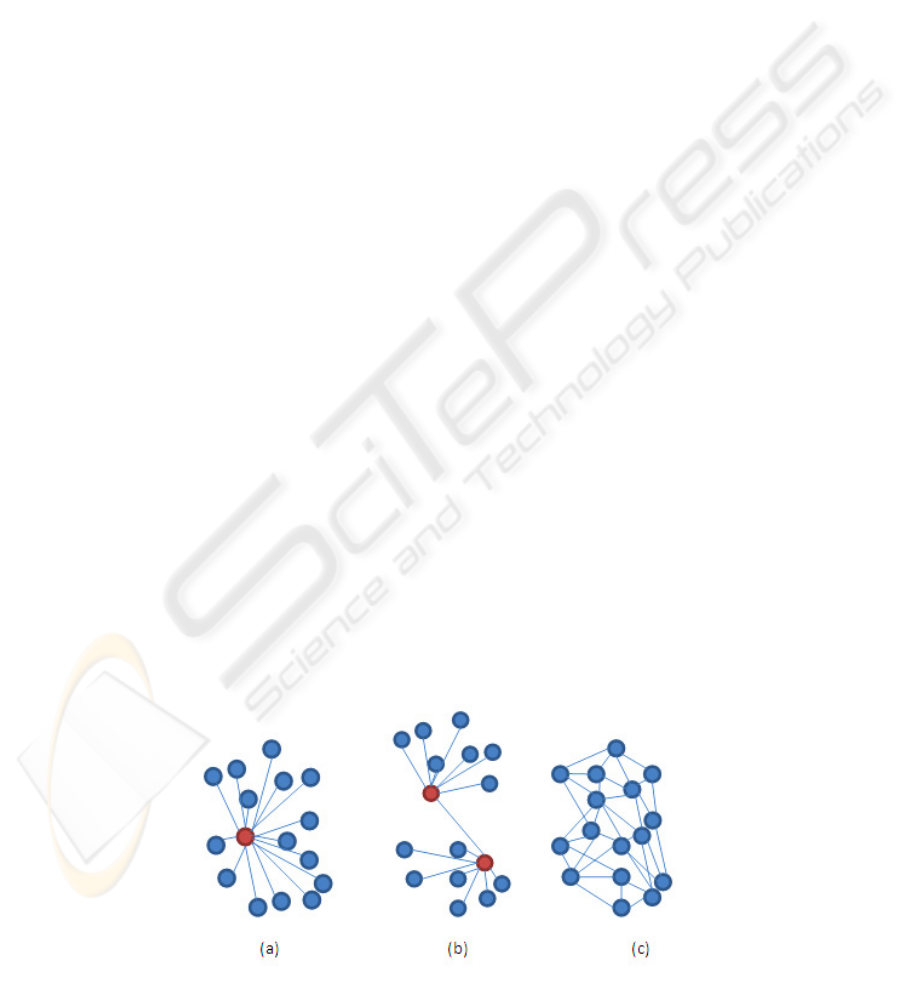
purposes of discussion, C2 topologies are
characterized in (Figure 3) as centralized, localized,
and distributed. If, for example, a key component for
determining C2 topology is the number of assets in
the area of interest, then thresholds could be
configured to trigger the formation a different
topologies as exemplified in Figure 4. In addition to
determining the salient factors, there is significant
challenge is in determining the threshold functions.
A more effective approach may consider
decomposing the problem such that these lower-
level categories are mapped into the higher levels
characterizations of information distribution,
interaction patterns, and allocation of decision rights
such as discussed by Alberts (Alberts, 2007). This
hierarchical decomposition may serve to simplify
the complexities involved in determining effecting
AC2 topologies.
3 COMMANDER’S INTENT
The understanding of Commanders Intent (CI)
clearly demonstrates that although the concept of
intent has been in our doctrine for quite a while,
confusion still exists and there is little empirical
investigation into the process of communicating
intent.
Figure 3: C2 Topologies: (a) Centralized, (b) Localized, and (c) Distributed.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
324

Figure 4: A notional mapping between the number of assets in the region of interest and the most effect C2 Topology.
CI has long been used to guide the actions of
subordinates, but has only recently been formally
included in doctrine. CI first appeared in US Army
Field Manual in 1982 (GPO, 1982). During the
1970s, when the military tended to centralize
decision making; however, failed hostage missions
and similar events signaled the need to empower
subordinate players on the scene. A model of today
concept of CI can be traced to Army doctrine writers
that used the German army’s Aftragstaktik (Silva,
1989) first introduced in the early 19
th
century. The
word means “mission-oriented” reflecting the
developments in response to the French Revolution.
This mission oriented methodology was the
realization that battle is marked by confusion and
ambiguity and that trust between superior and
subordinate is the cornerstone of mission-oriented
combat. Today, CI consists of a brief directive,
usually in written format with a purpose, a method,
and an endstate for any given operation. It is also the
single unifying focus for all subordinates elements
or groups of a command structure which are
dedicated to different activities (communication,
Intelligence, surveillance…) but which
cooperate/collaborate to achieve mission
effectiveness and success.
3.1 Concepts for Automating
Commanders Intent (CI)
Automating Commanders Intent (CI) and military
courses of action are very complex and difficult
activities. These activities should take into
consideration environmental information,
predictions, the end state targeted and resource
constraints. Automating Commanders Intent
involves solving simultaneously planning and
scheduling problems. In this section we provide 1)
an approach to transforming CI objectives into an
algebraic form, 2) a discussion on task scheduling,
optimization, and resource allocation.
3.1.1 Algebraic Representations of CI
An approach to transforming CI into an algebraic
form can best be described by the flow diagram
Figure 5. As mentioned above, a CI consists of a
brief directive containing objective statements. The
first transformation (formalization) of these
statements is done by utilizing a formal specification
language such as the one provided by Berzin & Luqi
(Berzins and Luqi, 1991). Formal statements of
objectives and constraints are then stored
permanently on a database. A Natural Language
Processing (parsing) function aided by a Naval
Lexicon provides formal unambiguous objective
statements for encoding; the encoder creates an
algebraic representation of these objectives creating
what we call elementary actions. The elementary
actions together with proper task scheduling
algorithms, multi-objective optimization functions,
and resource allocation methods provide a
framework for automating Commanders Intent.
3.1.2 Task Scheduling & Optimization
We suggest a task (course of action) approach to
automating Commanders Intent based on
evolutionary algorithms that use multi-objective
optimization methods and support resource
constrained CI development with both cardinal and
ordinal objectives.
During the development step, the commander
analyses the relative combat power of friendly and
enemy forces, and generates the CI.
CONCEPTS FOR AUTONOMOUS COMMAND AND CONTROL
325

Figure 5: An approach for transforming CI into a formal algebraic representation.
During the mission analysis, the objectives are
identified, assigned, and tasks (courses of action) are
implemented to perform the mission. These tasks
can be decomposed into sub-tasks. Tasks and sub-
tasks can be represented by means of a hierarchical
structure –a Graph. Synchronization analyses leads
to identifying temporal and spatial relationships
between elementary tasks. The automating algorithm
must consider all available resources and capabilities
and assign them to tasks. Synchronizing tasks then
requires scheduling of all tasks according to resource
availability, deployment constraints, and task
relationships. We provide a task (courses of action)
planning model as a multiple mode resource-
constrained scheduling problem (MRCPS) since,
from a methodological point of view planning and
scheduling are not much different. Our model
consists of representing generic activities (tasks with
specific combinations of resources) into elementary
(or primitive) actions interrelated to accomplish the
mission objectives. This process implies the
identification of the tasks (when and where),
precedence relationships, the pool of available
resources with their localization, and the objectives
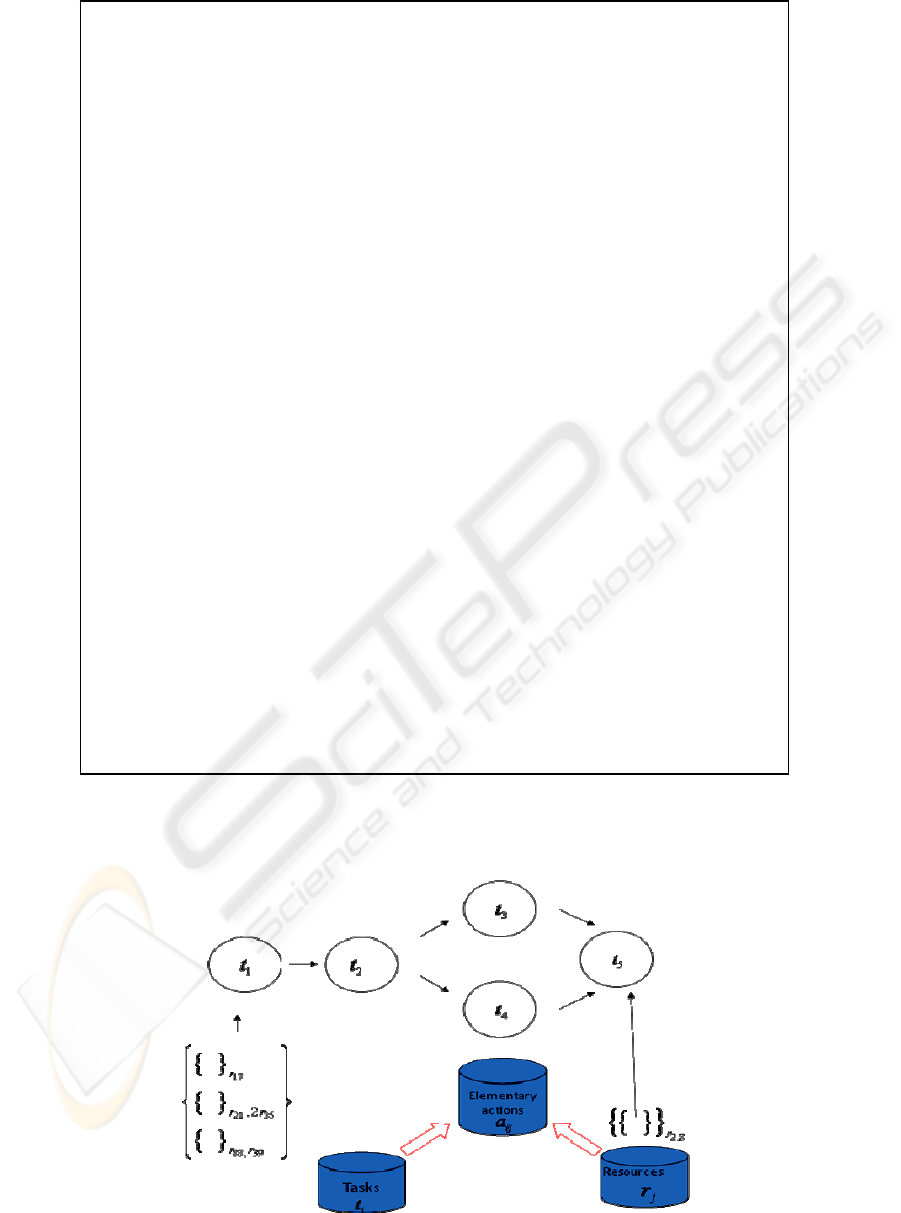
of the mission. An objective is then represented as
an oriented time-space graph of tasks. Figure 6.
Figure 6: An Objective represented as a task.
Depending on the combination of resources
allocated and the actions in the scheduler, different
courses of action networks could be obtained, such
as the one above. They constitute variants (or
alternatives) of a mission with different evaluations
on objectives. Solving CI and courses of action
planning problems is NP-Hard. But a feasible
process for automating CI with respect to multiple
objectives for resource allocation may include
evolutionary algorithms (EA) with meta-heuristic
approaches or a method that addresses the multi-
objective aspect of resource-constrained scheduling
problems in which all objectives are combined into
one single scalar value by using weighted
aggregating functions. The search is then performed
several times to find a compromise solution that
reflects these preferences. Another approach is to
generate the set of compromise solutions in a single
execution of the optimization such as done by
multiple-objective Evolutionary Algorithms. In this
section, we provide a construct for the tasking and
resource allocation associated with a CI that can be
implemented using multiple-objective EAs.
Evolutionary Algorithms are able to deal
simultaneously with multiple solutions for solving
multi-objective optimization problems allowing a set
of potential Pareto optimal solutions to be found in
the same iteration.
Here is our construct: Multi-objective CI can be
characterized by a set of tasks, a set of resources,
precedence relationships, resources, constraints and
global performance functions F
z
shown in Figure 7.
Once a CI has been decomposed into its requisite
tasks, the question of which autonomous unmanned
system should be responsible for executing each
particular task still remains. Many techniques for
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
326
Optimize:
, 1,...,
z
Fz Z=
s.t.
tD∈
s.t.
RD∈
Usevectoroftasks
{
}
12,...,
,
n
tt
havingthefollowingattributesforeachtask :
tt=
i
t
Definestartingandendingtime[
()
b
i
τ
,
()
f
i
τ
]
Defineearliestandlateststartingandendingtime[
()
s
i
τ
, ()
e
i
τ
]
Definetypeandqualityofresourcesrequired,representedbyaset
R
composedofrenewable
andnonrenewableresourcesavailableinlimitedquantities,i.e:
{
}
12
( ) , ,...,
ki i i mi
R
trrr=
isthe
k
setofresourcesrequiredtoaccomplishthetask t .
th
i
Considersetofpredecessors{PR}characterizedbythetasksthattemporallyand/orspatiallyprecedes
i
t
Useresources
R
havingthefollowingattributes:
Definestartingandendingtimeofavailability
[
]
(), ()
rs re
tktk
Definelocalizationofresources(x,y,z)
Definetypesofresources.
Defineotherspecificcharacteristicssuchas“meanspeedof(formobileresources)”,reliability,etc.
Figure 7: A construct for multi-objective task optimization for low size problem (~10actions).
Figure 8: Summary of the main concepts needed for Commanders Intent Automation.
CONCEPTS FOR AUTONOMOUS COMMAND AND CONTROL
327

multi-robot task allocation are included in the works
of Parker (Parker, 1998), LePape (Le Pape, 1990),
and others (Botelho and Alami, 1999). Mataric
(Gerkey and Mararic) provides a thorough review of
several Multi-Robots Task Allocation Frameworks.
4 AUTONOMOUS RESOURCE
ALLOCATION
Another key attribute of next-generation C2 is
convergence (Alberts, 2007). Convergence is the
ability for independent actors to achieve operational
coherence in a deterministic manner. The emergence
of platforms with multiple modalities (eg. sensing,
SAR, strike, etc….) in the manned and unmanned
arenas allows for additional flexibility in the
allocation of resources at the added cost of an
increasing complexity in the search space. The
resource allocation problem for AC2 must be able to
consider any platform for any task based upon the
platform’s capabilities. Optimizing across any
modality (COMMS, strike, sensing, etc…) is an NP-
hard problem. The AC2 resource allocation must
consider all modalities simultaneously in assigning
assets to objectives.
As stated above, the AC2 resource allocation
problem is a combinatorial optimization problem
that must consider the dynamic environment; a
nonlinear, multi-modal objective function; nonlinear
constraints; and binary decision variables.
Algorithms which address resource allocation
problems of this nature tend to be based on heuristic
methods. The extreme team methods (Scerri et al.,
2005) are effective in the presence of
communications limitations where global decision
support is not a viable option. Extreme teams have
the following characteristic:
• Near real-time assignments
• Platforms may perform more than one task
• Inter-task constraints may be present
Extreme teams are largely based on distributed
constraint optimization problems (DCOP) methods.
These types of algorithms can be applied to either
end of the C2 topology spectrum or can be used in a
complementary fashion for a localized topology
shown in Table 1.
Table 1: Recommended Resource Allocation Algorithms
for C2 Topologies.
The AC2 resource allocation performance must be
considered in light of scalability, satisficing behavior
(GPO, 1982), robustness, and generality. It is
important that the resource algorithm scale for large
numbers of assets and mission objectives. If the
solutions are near-optimal and generated in a
reasonable timeframe, the performance can be
considered to meet the satisficing criteria. In
addition, the algorithm must be stable, converge
rapidly, and insensitive to initial conditions. Finally,
the algorithm must be able to accommodate the
general nature of the objective described above.
The objective function under consideration by the
optimization engine should consider the following
components;
• Mission Effectiveness
• Mission Risk
• Mission Persistence
• Information Utility
The Mission Effectiveness considers all aspects
sensing communications and weapons required to
meet mission goals. The risk component considers
items such as METOC enemy defenses,
deconfliction and energy consumption. The
Persistence parameter may be required to minimize
global change in the solution set. For example, if a
global optimizer is used, then the results could be
dramatically varied at every solution step.
Persistence will reduce this variability. Finally, the
Information component is must be incorporated as a
metric to ensure that the right data gets to the right
place and platforms. For Autonomous C2 the
ramifications of automated subtask generation
should also be considered. Mission planners
generate many subtasks to satisfy the overall mission
objectives to achieve the desired effect(s). AC2 must
also be able generate sub-goals in a parsimonious
manner so that objectives can be accomplished and
new constraints generated by these sub-goals are
readily satisfied. The process of introducing sub-
goals and their associated constraints introduces a
complexity versus performance issue that should be
bounded within the AC2 construct. This notion is
analogous to Akaike’s Information Criterion (AIC)
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
328

Figure 9: Notional depiction of an AC2 Turing test in a mixed manned/unmanned systems environment.
where the number of parameters and the log-
likelihood of the error in the function being fitted are
balanced.
5 CONCLUSIONS
Command and control in the ether represents a shift
away from traditional C2 constructs. AC2 represents
the ubiquitous nature of C2 in the distributed realm
where emergent behaviors are manifested by large
groups of platforms that are more complex than
those emulating ants and birds in colony and
flocking models, respectively. The potential
collaborative behaviors that would emerge under
different information management strategies should
be addressed as part of an integrated investigation
incorporating the C2 topology and resource
allocation ideas described here.
While C2 of UxVs will be a driver in developing
AC2, the evolutionary step of mixed manned and
unmanned missions can be considered as an AC2
Turing Test. This notion is exemplified in Figure. 8
where the manned platforms under direction of the
AC2 system do not know whether they are under
direction of manned or unmanned systems.
REFERENCES
Alberts, D. S.: Agility, Focus, and Convergence: The
Future of Command and Control. The International C2
Journal: Special Issue on The Future of C2, Vol. 1, No
1, (2007) 1-30.
Joint Publication 1-02: Department of Defense Dictionary
of Military and Associated Terms,
(Sep,2002).http://www.dtic.mil/doctrine/jel/doddict.
The Navy Unmanned Surface Vehicle (UUV) Master
Plan. 23 July, 2007.
The Navy Unmanned Undersea Vehicle (UUV) Master
Plan. Nov. 9, 2004.
US Army Field Manual (FM) 100-5, Operations
(Washington, DC: Government Printing Office, (GPO)
1982.
J.L. Silva, “Aufragstaktik”, Infantry, September-October
1989, 6-7.
Valdis Berzins., Lucia Luqi., Software enginnering with
Abstractions, Addison-Wesley, Longman Publishing
Co., Inc., Boston, MA, 1991
P. Scerri, et al. “Coordinating very large groups of wide
area search munitions,” Theory and Algorithms of
Cooperative Systems, 2005.
L. Parker, “ALLIANCE: An Architecture for fault-tolerant
multi-robot cooperation,” IEEE Transactions of
Robotics and Automation, vol. 14, no. 2, pp. 220-240,
1998.
C. Le Pape, “A combination of centralized and distributed
methods for multi-agent planning and scheduling,” in
Proceedigns of ICRA, 1990, pp. 448-493.
S. Botelho and R. Alami, “M+: A Scheme for multi-robot
cooperation through negotiated task allocation and
achievement,” in Proceedings of ICRA, 1999, pp.
1234-1239.
B. Gerkey and M. Mararic, “A formal analysis and
taxonomy of task allocation in multi-robot systems,”
International Journal of Robotics Research, vol.23, no.
9, pp. 939
CONCEPTS FOR AUTONOMOUS COMMAND AND CONTROL
329
