
Using Predictive Digital Map Data to Enhance Vehicle
Safety and Comfort
Julián Requejo, Christian Ress, Aria Etemad and Detlef Kuck
Ford Research & Advanced Engineering Europe
Süsterfeldstr. 200, 52072 Aachen, Germany
Abstract. Navigation systems based on GPS and digital maps have become ex-
tremely popular in passenger and commercial vehicles during the last years.
The accuracy and amount of information contained in digital maps is constantly
evolving, offering a tremendous amount of knowledge about the road network.
In addition to providing driving directions, this information may be used on a
wide range of technologies. One of these is the so-called Electronic Horizon, an
application based on digital maps that helps to overcome the physical limits of
many vehicle sensors, such as radar and vision systems. This is accomplished
by predicting where the driver is heading, and subsequently extracting from the
digital maps information about the predicted path. This paper provides an in-
troduction to the Electronic Horizon, the Most-likely Path concept, and gives
some examples of how digital map data can be used for the enhancement of
comfort and safety functions.
1 Background
In recent years, navigation and telematics systems based on GPS and digital map
databases have become increasingly popular in passenger and commercial vehicles.
The accuracy of GPS receivers has improved with the introduction of new chipsets
and technologies like the SiRF III and DGPS. At the same time, the road coverage of
digital maps has been extended, its accuracy has been improved, and map vendors
have committed to offer even further improvements in upcoming generations. In
addition to road network topography, digital maps are able to carry large amounts of
information describing the characteristics of the road. These include information like
speed limit, number of lanes, curvature, slope, tunnels, lane dividers, traffic signs, and
many other important attributes.
These digital map attributes can be very useful to many in-vehicle applications be-
yond the traditional point-to-point driving directions. This paper is divided in two
main sections. The first part will introduce the reader to the Electronic Horizon con-
cept. This technology is used for efficiently extracting the most relevant data from
digital maps, and presenting it to other applications via a common interface layer. The
second part will give an overview of some of these applications and functional en-
hancements, some which would not be as efficient or even not realizable without the
use of digital map data.
Requejo J., Ress C., Etemad A. and Kuck D. (2008).
Using Predictive Digital Map Data to Enhance Vehicle Safety and Comfort.
In Proceedings of the 2nd International Workshop on Intelligent Vehicle Control Systems, pages 50-59
Copyright
c
SciTePress
2 Electronic Horizon
As modern vehicles are constantly being equipped with additional functionalities, the
amount of in-vehicle electronics is equally growing. This not only increases the over-
all complexity, but it also introduces additional production costs. New technologies
like adaptive cruise control require a radar sensor, while other functions like over
speed warning rely on camera sensors for the recognition of traffic signs.
Although physical sensors have experienced substantial improvements and cost
reduction within the past years, their range is still limited by physical constrains.
Despite the accuracy of the traffic-sign pattern recognition, no vision sensor is able to
anticipate the speed limit behind the next curve. Other road attributes like the pres-
ence of upcoming traffic lights, pedestrian crossings, or the estimating the radius of
an upcoming curve can simply not be deduced by using conventional sensors.
Digital maps on the other hand, can be bundled with large amounts of data about
the road network. By extracting information from the digital maps, a speed warning
system would be able to make decisions based on speed limits several hundred meters
ahead. This range goes substantially further than in conventional vision systems,
allowing for new or enhanced functionality.
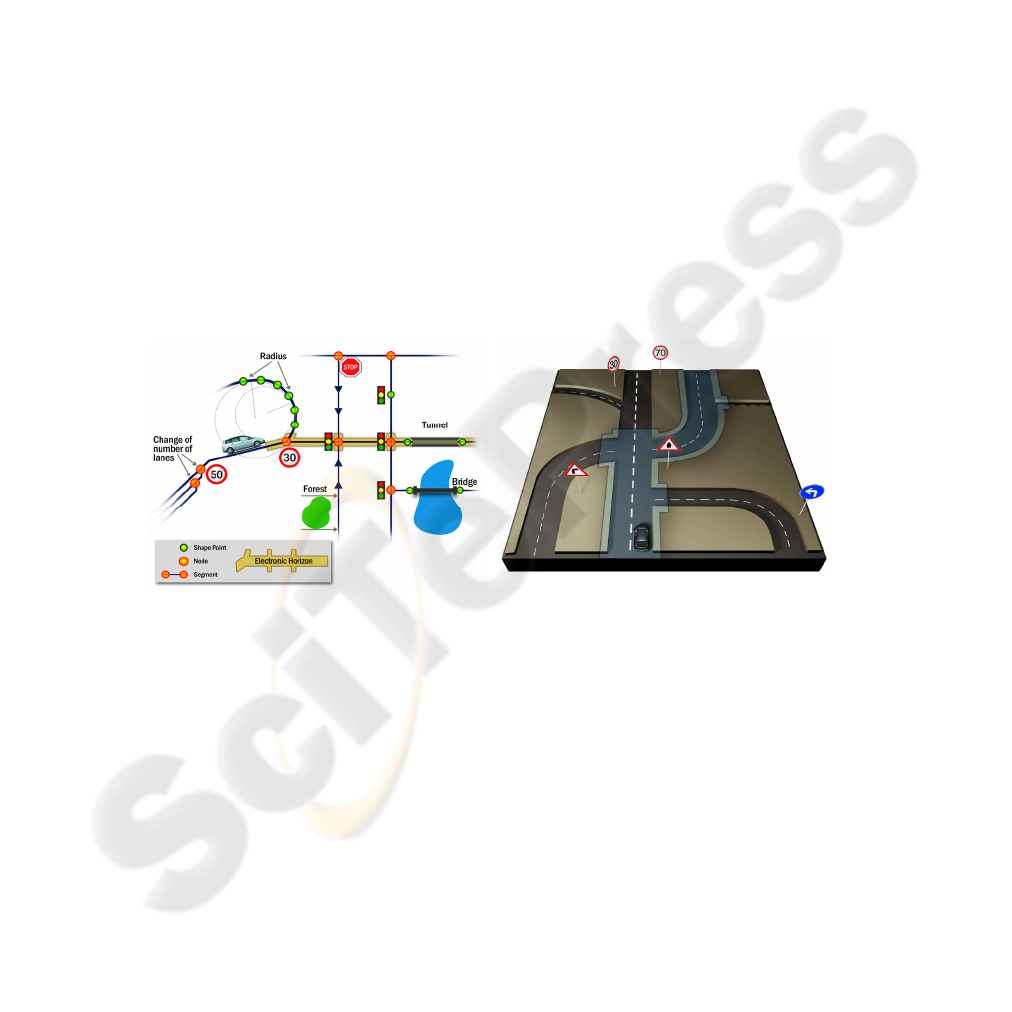
Extracting digital-map information about the road being driven and presenting to
other applications constitutes the so-called Electronic Horizon (EH) concept. Figure 1
(left) illustrates how EH interprets digital-map data at the current vehicle position and
uses this information for creating a virtual view of the road ahead.
Fig. 1. Electronic Horizon and the Most-likely Path concept.
The task of extracting digital information from the roads with the virtual horizon
becomes exponentially complex as network density increases. In highly dense areas
with multiple intersections, such as large cities, the amount of possible paths grows
rapidly. Extracting map information about every possible path would be unfeasible
and constitute a waste of system resources. As a matter of fact, most applications that
would benefit from EH are not interested in all possible scenarios, but rather on the
most-likely one.
Figure 1 (right) illustrates the most-likely path concept (MLP) in a scenario with
multiple intersections. Several methods exist for estimating the most-likely path.
These vary in accuracy, complexity, and required system resources. If the driver is
using the navigation system for driving directions, the destination address and the
51

corresponding planned route are readily known. Other methods include static predic-
tions based on road classes, or more complex dynamic calculations. Nevertheless,
regardless the computational method, MLP is effectively able to reduce a 360 degree
electronic horizon such as that shown in Figure 2, down to a single virtual linear road.
Armed with a unique path, EH can now discard all not-so-likely alternatives, and
extract as much digital information as possible about the most-likely path. All rele-
vant information is then filtered, sorted, and presented using a standard interface to
other applications [1]. It should be obvious that the feasibility of EH and the use of
digital map data is highly dependent on the accuracy of the MLP predictor. If the
vehicle energy management module bases its charging cycle decision on a wrong
prediction, the benefit of EH would not be as significant. Ford Research Centre
Aachen has developed an MLP algorithm based on past experience. This method is
able to learn the driving patters of the vehicle owner, creating a driving history that
may be used in subsequent drives. After a few days of learning, this technique has
been able to achieve accuracy levels of up to 99% under typical driving behavior [2].
3 ADAS Application Support
The high level of accuracy achieved by MLP in combination with past experience has
permitted the development of a very robust EH. The information extracted from EH
has been used by different applications, some for enhancing performance, while in
other situations for providing new functionality. Some applications currently being
researched by the automotive industry will be presented in the following sections.
3.1 Curve Speed Warning
Accidents due to high speeds in curves have always been a concern to drivers. Slip-
pery surfaces, hidden curves, and sharp turns are some examples of the many danger-
ous situations that could arise when driving curves. In other scenarios, driving in
curves at high speed might not be necessarily dangerous, but it could provide discom-
fort to the driver or its passengers.
Curve-speed warning technology (CSW) has been developed with the goal of
identifying these uncomfortable or potentially dangerous situations, and being able to
warn the driver with enough time to react. CSW is a non intrusive technology, based
on standard digital maps that are commonly present in GPS-based navigation sys-
tems. Since the application does not require additional physical sensors, its additional
functionality is provided at a minimum cost. The process of identifying hazardous
situations is divided into different phases. First, the system needs to predict the road
that is most likely to be taken by the driver. Once the route is identified, the system
accesses the digital maps and retrieves information about the shape and characteris-
tics of the upcoming curve. The combination of path prediction and extraction of
information from the digital maps is provided by the electronic horizon module (EH).
Figure 2 illustrates the CSW principle based on gathering the shape points that de-
scribe an upcoming curve, and using this information to estimate the road curvature.
52

Fig. 2. Curve Speed Warning curvature estimation.
Future generations of digital maps will incorporate curvature information as native
road attributes, simplifying the real-time computational requirements during driving.
In addition to road curvature, CSW considers other factors such as weather conditions
and estimates of road friction. With this information in hand, the maximum recom-
mended speed for the curve is estimated. If the vehicle is approaching the curve at a
speed higher than the recommended value, the system could either warn the driver of
the potential hazard, or actively inhibit further acceleration of the vehicle. In order to
avoid annoying the driver with unnecessary warnings, the alert threshold is dynami-
cally adjusted based on the driving style. This allows the system to recognize whether
the driver prefers a sportive or a more comfort-oriented driving style, adjusting itself
without user intervention.
In this way, curve-speed warning is effectively able to increase the driver awareness
in dangerous scenarios, therefore reducing the likelihood of accidents.
3.2 Lane Keeping Support
Automotive OEM and suppliers have been actively looking for ways to improve the
overall vehicle safety using cameras and visual sensors. Lane Keeping Support (LKS)
is a camera-based technology which uses road pictures and image processing algo-
rithms for determining whether the vehicle is driving within lane boundaries.
This technology is of significant importance not only for passenger vehicles, but also
for commercial vehicles, where drivers are subject to long periods of driving. LKS is
able to assist the driver in several dangerous scenarios, such as sleepiness, tiredness,
or simple distractions.
These algorithms typically work by recognizing the lane markings painted on the
road and computing the intended direction of travel. In parallel, the algorithm analy-
ses the steering wheel angle, vehicle speed, and other parameters, and determines the
actual direction of travel. If the intended direction of travel differs from the actual
direction of travel, the system is able to spot a lane departure scenario.
Each LKS implementation may react in response to lane departures in different
ways. This could be either by means of an acoustic alarm, an active intervention on
the steering wheel, or a combination of both. Active intervention systems are usually
53

very subtle, providing only a steering guidance that is overridden as soon as the
driver resumes control of the situation.
Despite its potential, there are several scenarios that could easily confuse the lane
detection algorithm. Figure 3 (left) shows a typical lighting problem due to the low
dynamic range of typical camera sensors. In this example, exiting from a tunnel in a
sunny day exposes the camera to a simultaneous dark and bright situation that is not
able to handle properly. As a result, LKS is not able correctly determine the lane
markings beyond the tunnel, forcing to temporarily disable the safety feature.
Fig. 3. Lane detection problems due to lighting conditions and lane expansion.
The right side of figure 3 shows another problematic scenario due to changes in
the lane configuration. In this example, a new lane opens in the highway, confusing
the algorithm for detecting lane markings. Such a situation would trigger a false lane
departure alarm or even worse, an incorrect active intervention. Lanes that merge or
split, highway entrances and exits, bicycle lanes, and pull-in lanes are just some ex-
amples of the many situations that could confuse the lane recognition algorithm. One
way to improve accuracy of the system under these scenarios is with the support of
digital map data and EH. Next generations of digital maps, as well as some prototypes
used within research, already incorporate attributes with the number of lanes, type of
markings dividers, exits and entrances in highways, and tunnels. By combining vision
sensor information with digital map data, it is possible to predict an upcoming situa-
tion that could confuse the lane detection algorithm. In these examples, the lane de-
parture system would know from the digital map data that the vehicle is in a situation
that would likely confuse the vision algorithm. As a countermeasure, the system
could either use an alternative strategy or temporarily inhibit the false alarm.
By incorporating knowledge about the road ahead, LKS can reduce the amount of
false positives, therefore reducing the driver annoyance, increasing the acceptance of
the technology, and improving the overall vehicle safety.
3.3 Adaptive Cruise Control
Automatic cruise control has been present in series vehicles for many years, as a way
to increase driving comfort in those situations where a constant speed is desired, such
as driving in highways. With the introduction of radar and laser sensors in vehicles,
54

next generation cruise control systems have been developed. In addition to maintain-
ing a constant speed, adaptive cruise control (ACC) uses radar or laser sensors to
monitor the speed of the vehicle ahead, as well as the distance separating them. If the
difference in speed and distance is considered to be unsafe, ACC could warn the
driver, reduce the target speed, or even actively brake the vehicle.
Despite being a leap forward in comparison to standard cruise controls, ACC can
easily get confused under various driving scenarios. Figure 4 shows one these poten-
tially dangerous situation. In this example, the driver had programmed his cruise
control to drive at a certain speed. After a while, the vehicle encountered a slower
vehicle ahead. In order to maintain a safety distance, ACC reacted by reducing the
vehicle speed. After some time, now the driver desires to leave the highway, pulling
into the exit lane. At this point, ACC will see the slower vehicle disappear and as a
result, it would accelerate back to the target speed. This behavior is probably the
opposite of what the driver expects when exiting from a highway and it could repre-
sent a very dangerous situation.
Fig. 4. Adaptive Cruise Control problem when exiting from a highway.
One way to support ACC in these confusing situations is with digital map information
provided by EH. If the system had known that the driver was likely to exit the high-
way, it would have not accelerated. Even in the event of an incorrect prediction, by
simply knowing about a highway exit at the current location, ACC would have waited
until past the exit, in order to make sure that the driver is still in the highway.
By providing additional information about the road, EH is effectively able to as-
sist ACC, improving its overall effectiveness and user experience.
3.4 Adaptive Front Lighting
Headlamps have always been an important item during vehicle design. Automotive
OEMs have provided customers with headlights whose height may be easily adjusted
with the push of a button, cooler and brighter lamp colors, and extra lights for aiding
in parking maneuvers. Despite its usefulness, these solutions offer limited functional-
ity and often require some manual intervention by the driver.
In contrast to fix lighting, adaptive front lighting (AFL) is able to adapt the shape,
height, intensity, area covered, and other aspects of the light beam to fit each particu-
lar driving scenario. This permits AFL to customize the lighting to each particular
driving situation, improve overall visibility and vehicle safety.
Despite its potential, determining the correct driving scenario and predicting the
shape of the road headed by the vehicle constitute major obstacles for an effective
55

AFL. This information can be extracted by the Electronic Horizon, enabling the use
of interesting configurations not possible otherwise.
Figure 5 shows different situations in which AFL in combination with EH is able to
provide some assistance. While waiting on a traffic light, AFL can adjust its lighting
pattern to match the intended behavior. If EH predicts a left turn, AFL would focus
its beam on that direction, with the possibility of an additional side LED-light for
spotting crossing pedestrians. This provides not only a clearer view of the road, but it
also shows the driver's intention to other vehicles, and it provides additional pedes-
trian protection.
Fig. 5. Various scenarios suitable for Adaptive Front Lighting.
If driving straight, AFL would extend the range slightly further, offering a more com-
fortable view in the direction of travel.
Using this technology in curves or winding roads provides a better view of the
road, while inducing the driver to look in the direction headed by the vehicle. In addi-
tion, it reduces the blinding effect experienced by forthcoming vehicles, offering an
increase in comfort, as well as in overall safety. Highways can be easily identified by
EH and, depending on external factors like the presence of other vehicles, it may
switch to a long range mode for optimal lane view, or a more conservative low-beam
configuration.
3.5 Hybrid Vehicle Support
With the introduction of hybrid vehicles into the market, considerable effort has been
devoted to maximizing their efficiency. The main concept behind hybrids is to com-
bine an electrical motor with a traditional gasoline engine, profiting from the advan-
tage offered by each device. On one hand, regenerative braking is used for recovering
energy that would otherwise be lost as heat. This energy is stored in a high-capacity
battery and later is reused by the electric motor. This could be used for briefly driving
the vehicle at low speeds, where the gasoline engine would not be as efficient. Alter-
natively, the electric motor may provide a complementing torque to the power-train,
reducing the work of the gasoline engine. Despite its advantages, accomplishing an
optimal energy management strategy is a difficult task. For instance, driving downhill
or braking with a fully charged battery would constitute a waste of valuable energy.
Likewise, starting a charging cycle before a hill would probably overload the engine
56

and require an interruption of the charging phase. Using stored energy as a comple-
mentary torque close to a pedestrian crossing might not represent the best choice, as
this energy could possibly be better used for accelerating the vehicle after the cross-
ing. Many possible scenarios and strategies are conceivable for hybrid vehicles, and
determining an optimal decision is dependent on multiple factors. Nevertheless, using
digital map data can be of great value to the energy management strategy. Informa-
tion coming from EH such as traffic lights, pedestrian crossings, and road inclination
can be used for optimizing the assessment. Figure 6 illustrates EH in action. After
predicting the most-likely path, EH gathers information about slope (shown in the
figure with color bars), traffic lights, and crossings up to 1km ahead.
Armed with a profile of the road ahead, the vehicle is able to compute more effi-
cient engine and charging strategies, ultimately leading to lower fuel consumption.
Fig. 6. Electronic horizon supporting hybrid vehicles.
3.6 Driver Awareness
One important safety application of electronic horizon is the inducing of higher driver
awareness, with the immediate consequence of an improved overall safety. In contrast
to other safety technologies like CSW, driver awareness intends to identify poten-
tially dangerous scenarios based exclusively on digital map data and current vehicle
location. These scenarios could be specific locations that the driver should be aware
of, such as kindergartens, schools, pedestrian crossings, or dangerous intersections.
Another important example of driver awareness is the identification of the so-
called hot-spots. These are locations statistically known to be problematic or have
previously incurred in a large number of accidents. These could be specific highway
entrances, lanes that enter an avenue without a merge area, difficult left turns on two-
way roads, narrow bridges, roads susceptible to icing, etc. However, in order to pro-
vide valuable information ahead of time, it is essential to implement a highly reliable
electronic horizon using precise digital map data, and an accurate most-like path
prediction.
3.7 Green Driving Support
The rising prices of oil, in combination with increasing pressure from governments to
reduce vehicle emissions have become a major concern to both drivers and manufac-
tures. The automotive industry is investing considerable effort in reducing fuel con-
sumption levels, such as with the introduction of hybrid vehicles and better engine
management. At the same time, the transportation business is quite aware of the fact
57

that driving style has a large impact in fuel consumption. These concerns have intro-
duced the concept of green driving or green navigation.
One way to support green driving is by computing routes to destination that would
result in the lowest fuel consumption. Drivers are usually aware of the fact that driv-
ing on highways is more efficient than driving through the city. However, other fac-
tors such as hills or mountains, speed limits, traffic lights, and types of intersection
play an important role in finding the green route.
Determining the green route is difficult for the driver, particularly if he is not fa-
miliar with the area. Quite often, the route with the lowest fuel consumption does not
represent the fastest route. And to make things harder, routes with best fuel economy
are not necessarily the routes with lowest fuel consumption. This makes an educated
guess a difficult task. Figure 7 shows two real-world alternatives computed by the
driving-directions portal Map24. The first alternative shown on the left was provided
as the fastest route, with a distance of 13 Km and an estimated travel time of 19 min-
utes. The fuel consumption was predicted to be 0.9 Liters, giving a fuel economy of
6.67 L/100 Km. The second route was provided as the shortest route, with a distance
of 10.4 Km, a travel time of 21 minutes, and a fuel consumption of 0.7 L. This con-
figuration gives a fuel economy of 7.17 L/100 Km. Other examples could show an
opposite scenario, where the lowest fuel consumption is achieved by the fastest route.
Fig. 7. Two route alternatives from A to B (source map24).
In any case, digital map data is essential for estimating the greenest route. This com-
putation is carried by combining slope, road class, and surface type information, as
well as a profile describing the consumption characteristics of the vehicle.
Although the green route is typically computed before departure –by entering the
destination into the navigation system–, EH is also able improve the fuel consumption
during driving. With knowledge about the road ahead, such as slope and road class
information, green route is able to optimize the engine and energy management
strategies. This effectively results in a reduction of the overall fuel consumption, and
consequently lower emissions and a greener driving.
58

4 Conclusions
The introduction of navigation systems in passenger vehicles has opened the door for
a large number of applications. In addition to the highly deployed driving guidance,
digital maps contain a tremendous amount of information that could support existing
applications, as well as enable new technologies not realizable otherwise. This paper
has provided an overview of some map-based applications currently being researched
in the automotive industry. Despite their potential, it should be emphasize that the
effectiveness and acceptance of these technologies is highly dependent on precise
map data and an accurate electronic horizon. Map vendors are working in cooperation
with the automotive industry to provide the necessary road attributes in their next-
generation maps. At the same time, new generation of GPS technologies are offering
better precision, and the accuracy of digital maps is being constantly improved.
As next-generation maps and new technologies become available to consumers,
more map-based applications are expected to be deployed in vehicles. Due to their
low implementation cost, these features are very attractive to OEMs. These will not
only offer additional driving comfort, but also improve the overall vehicle safety.
References
1. Ress, C., Etemad, A., Kuck, D., Boerger, M.: Electronic Horizon - Supporting ADAS
applications with predictive map data. Proceedings of ITS World Congress, London,
United Kingdom (2006)
2. Etemad, A., Ress, C., Boerger, M.: Generating accurate Most Likely Path data. Proceed-
ings of ITS World Congress, London, United Kingdom (2006)
3. Ress, C.: The potential of digital map data to enhance ADAS functions. Telematics Update
Magazine, Issue 40, First Conferences Ltd, London (2007)
4. Ress, C., Etemad, A., Kuck, D., Requejo, J.: ). Electronic Horizon – Providing digital map
data for ADAS applications. The Second International Workshop on Intelligent Vehicle
Control Systems, Madeira, Portugal (2008)
59
