
COLLABORATION VS. OBSERVATION: AN EMPIRICAL STUDY IN
MULTIAGENT PLANNING UNDER RESOURCE CONSTRAINT
Emmanuel Benazera
LAAS-CNRS, Universit´e de Toulouse, 7 av. du Colonel Roche, 31077 Cedex 4, Toulouse, France
Keywords:
Multiagent planning, Decentralized Markov Decision Processes, Resource constraints, Empirical study.
Abstract:
A team of robots and an exploratory mission are modeled as a multiagent planning problem in a decentralized
decision theoretical framework. In this application domain, agents are constrained by resources such as their
remaining battery power. In this context, there is an intrinsic relation between collaboration, computation
and the need for the agents to observe their resource level. This paper reports on an empirical study of this
relationship.
1 INTRODUCTION
Among formal models for the control of collabora-
tive multiagent systems, decision-theoretic planning
has focused on Markov Decision Problems (MDPs)
(Boutilier et al., 1999). There exist several multi-
agent extensions to the MDP framework. The de-
centralized MDP framework (DEC-MDP) represents
agents whose knowledge is partial and that act rel-
atively to their local models of the world. An even
more general framework is the decentralized partially
observable MDPs (DEC-POMDPs) where individual
agents do not fully observe their portions of the world
(Bernstein et al., 2002). The multiagent control prob-
lem where agents have both stochastic actions and in-
ternal continuous state-spaces can be represented as
decentralized hybrid MDP (DEC-HMDP). By hybrid
it is meant that it involves both continuous and dis-
crete variables. DEC-HMDPs are related to DEC-
POMDPs with the difference that the former decide
in the observation space whereas the later decide in
the belief space.
Many real-world planning applications that in-
volve teams of agents can be modeled as DEC-
HMDPs. Our application domain is that of teams of
exploratory robots. The interest in building and con-
trolling teams of agents is motivated by an expected
increase in both the overall capabilities and the ro-
bustness of the system. In our application domain,
the continuous state-space of an agent represents its
available level of resource, such as battery power and
remaining time for the mission. A consequence of the
resource constrained nature of the agents is that each
of them is rarely able to achieve all the tasks in a mis-
sion. It follows that agents have to pay close attention
to their resource levels before taking decisions such
as achieving one task or the other. In this context,
what the designers of multiagent robotic missions and
systems may not foreknow is that there is an intrin-
sic relation between collaboration, computation and
the need for the agents to observe their local world.
In other words, the amount by which the agents con-
strain each others, that is the level of collaboration
allowed, affects the need for observation of the agent
local worlds, as well as the difficulty of computing
an optimal controller for the team. This has poten-
tial consequences on the design of both missions and
robots themselves.
Modern algorithms allow solving DEC-HMDPs
with a small number of agents (Becker et al., 2004;
Petrik and Zilberstein, 2007). This paper’s focus
is not on the computational techniques for DEC-
HMDPs but rather on the form of their solutions and
the light they shed on the relation between collabo-
ration, computation and the need for agents to ob-
serve their local world. Through simulations and
tests, empirical evidences are given of the structured
relationship between collaboration, computation and
the need for observation. The first half of the paper
lay the required background for understanding the re-
source constrained DEC-HMDP framework. The sec-
ond half reports on a series of experiments and em-
pirically establishes a few useful facts that connect
collaboration, computation and the need for observa-
tion.
294
Benazera E. (2008).
COLLABORATION VS. OBSERVATION: AN EMPIRICAL STUDY IN MULTIAGENT PLANNING UNDER RESOURCE CONSTRAINT.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics, pages 294-300
DOI: 10.5220/0001508702940300
Copyright
c
SciTePress

2 BACKGROUND
We give with a brief overview of decentralized hy-
brid Markov decision processes, and its resource con-
strained variant. The reader interested in more de-
tailed description is referred to (Becker et al., 2004).
2.1 Decentralized Hybrid Markov
Decision Process and Resource
Constraints
A team of m agents is modeled as a DEC-HMDP. It
is defined by a tuple (N, X, A, φ, R, N
0
). N is a set
of m discrete variables N
i
,i = 1, ··· , m, that refer to
each agent i discrete component, and n
i
denotes a dis-
crete state in N
i
. X =
N
m
i=1
X
i
is the continuous state
space, and x
i
denotes a continuous state in state-space
X
i
. A = A
1
× · · · × A
m
is a finite set of joint actions.
φ = φ
1
× · · · × φ
m
are joint transition functions. φ is
decomposed into the discrete marginals P(n
′
| n, x, a)
and the continuous conditionals P(x
′
| n, x, a, n
′
). For
all (n, x, a, x
′
) it holds
∑
n
′
∈N
P(n
′
| n, x, a) = 1 and
R
x∈X
P(x
′
| n, x, a, n
′
)dx = 1.
R
n
(x) denotes the reward obtained in joint state
(n;x) where n ∈ N, x ∈ X. N
0
is the initial discrete
state, with initial distributions P
0
(x
i
) for each agent
i = 1, ··· , m and P
0
(x) =
N
m
i=1
P
0
(x
i
).
In our application domain, continuous variables
model non-replenishable resources. This translates
into the assumption that the value of the continuous
variables is non increasing. Each resource is internal
to an agent and is thus independent of other agent re-
sources. It is thus assumed that an agent action has no
effect on other agent resource states. In this work we
rely on the stronger assumption that the DEC-HMDP
is transition independent, that is an agent action has
no effects on other agent discrete state as well (Becker
et al., 2004). This assumption greatly simplifies the
computation and adds useful properties to the frame-
work.
An m-agents transition independent DEC-HMDP
(TI-DEC-HMDP) is a DEC-HMDP such that for a ∈
A, n ∈ N, x ∈ X, φ is such that
∀i= 1, ··· , m,
(
P(n
′
i
| n, x, a) = P(n
′
i
| n
i
, x
i
, a)
P(x
′
i
| n, x, a, n
′
) = P(x
′
i
| n
i
, x
i
, a, n
′
i
).
In the rest of the paper, we consider an m-agents
resource constrained TI-DEC-HMDP (RC-TI-DEC-
HMDP).
2.2 Goals, Policy and Reward
Agents operate in a decentralized manner, and choose
their actions according to their local view of the
world. They do not communicate but are cooper-
ative, i.e. there is a single value function for all
agents. We assume a set of identified global goals
{g
1
, ··· , g
k
}, each of which is known and corresponds
to an achiement by one or more agents. Each g
j
∈ N
is such that g
j
= {g
ij
}
i=α
1
j
,···,α
q
j
j
where g
ij
∈ N
i
and
α
q
j
∈ {1, · · · , m}. For simplifying notations, we note
i ∈ g
j
the fact that g
ij
∈ g
j
, i.e. agent i is involved in
goal state g
j
. The reward function for a RC-TI-DEC-
HMDP is decomposed into two components for each
goal j: a set of individual local reward functions for
each agent, the R
g
ij
(x
i
); a joint reward c
j
(x) the team
receives and that depends on the actions of more than
one agent.
The joint reward articulates the interaction among
agents. In general agents seek to maximized the local
and joint reward functions. In this case negative c
j
such as in our case study (see 2.3) can be seen as a
penalty put on some agent interactions. Positive c
j
naturally favor certain other interactions.
Given a RC-TI-DEC-HMDP, we define a policy
π = {π
1
, ··· , π
m
} : (N,X) → A to be a mapping from
the spate space to the action space. A global value
function GV : (N,X) → ℜ gives the expected total re-
ward of the system starting from an initial state and
acting according to the policy π until termination.
Termination occurs whenever all goals are achieved
or all agents have run out of resources. Similarly,
the local value function V
i
: (N
i
, X
i
) → ℜ gives the
expected total reward for agent i, and the joint value
function JV : (N, X) → ℜ gives the joint expected to-
tal reward of the system. The joint value function is
given by
JV(x | π
1
, ··· , π
m
) =
k
∑
j=1
c
j
(x)
∏
i∈g
j
P
g
ij
(x
i
| π
i
) (1)
where the c
j
are the joint rewards, and P
g
ij
(x
i
| π
i
) is
the probability agent i has to achieve goal j according
to the policy π
i
. Often the joint rewards are in fact
penalties. The global value function is given by
GV(x | π
1
, ··· , π
m
) =
m
∑
i=1
V
i
0
(x
i
) + JV(x | π
1
, ··· , π
m
)
(2)
where V
i
0
(x
i
) is the local value function for the initial
state of agent i. The optimal joint policy is noted π
∗
=
{π
∗
1
, ··· , π
∗
m
}, given by
π
∗
= argmax
π
1
,···,π
m
E
X
[GV(x | π
1
, ··· , π
m
)] (3)
where E
X
denotes the expectation over state space X.
The optimal value function is GV
∗
(x | π
∗
1
, ··· , π
∗
m
) =
max
π
1
,···,π
m
GV(x | π
1
, ··· , π
m
). Note that action Abort
i
ends the policy of agent i.
COLLABORATION VS. OBSERVATION: AN EMPIRICAL STUDY IN MULTIAGENT PLANNING UNDER
RESOURCE CONSTRAINT
295

2
1
3
n
0
n
1
n
2
n
3
µ
1
= 10 σ
1
= 10
µ
2
= 20 σ
2
= 10
µ
3
= 10 σ
3
= 20
µ
1
= 10 σ
1
= 10
µ
2
= 10 σ
2
= 10
µ
3
= 10 σ
3
= 20
µ
1
= 10 σ
1
= 10
µ
2
= 20 σ
2
= 10
µ
3
= 10 σ
3
= 20
µ
1
= 10 σ
1
= 10
µ
2
= 30 σ
2
= 10
µ
3
= 10 σ
3
= 30
g
1
:
R
11
= 10
R
21
= 10
R
31
= 7
g
2
:
R
12
= 13
R
22
= 8
R
32
= 15
g
3
:
R
13
= 8
R
23
= 20
R
33
= 12
Figure 1: Case-study: a 3 agents / 3 goals problem.
2.3 Case-study
Consider the problem on figure 1. Three rovers
share three rocks over four locations. The (µ
i
, σ
i
)
are the standard mean and variance of the Gaussian
distribution that models resource consumption P(x
′
i
|
x
i
, n, n
′
, a) of rover i on each path (n, n
′
). R
g
ij
is the re-
ward function for achieving goal j and agent i. Each
rover starts from a different initial location.
We study a joint value of the form
JV(x | π
1
, ··· , π
m
)
= −β max
i∈{0,···,m}
k
∑
j=1
R
g
ij
(x)
∏
i∈g
j
P
g
j
(x
i
| π
i
) (4)
where β ∈ [0, 1]. In other words, the joint reward sig-
nal c
j
(x) for goal j is a negative factor, or penalty, of
value the maximum reward possibly obtained by an
agent for that goal. The rational behind this model is
that it allows to parametrize the collaboration among
agents. Thus for β = 1 no collaboration is beneficial,
and each agent has a high incentive of avoiding goals
already achieved by other agents. When β < 1, there
is incentive for all agents to consider all goals, with
the amount collaboration inversely proportional to β.
For this reason, in the following, we refer as the col-
laboration factor of a team of agents as a function that
is inversely proportional to β.
2.4 Oversubscription, Conditional
Policies, Branches and Observations
2.4.1 Oversubscription in Goals
In a RC-TI-DEC-HMDP, the resource constrained na-
ture of each agent gives rise to over-subscribed plan-
ning problems. These are problems in which not all
branches
a
0
a
0
a
i
a
j
a
i
1
a
i
2
a
i
3
o
i
o
i
o
j
o
j
n
0
n
0
n
i
n
i
n
j
x
0
x
i
≤ x
∗
i
1
x
∗
i
1
< x
i
< x
∗
i
2
x
i
≥ x
∗
i
2
k
i
Figure 2: MDP policy (left) and HMDP policy (right).
the goals are feasible by each agent under its internal
resource constraints and the initial distribution over
its resources. Their solutions are characterized by the
existence of different achievable goal sets for differ-
ent resource levels. In our application domain, it is
assumed that each goal can be achieved only once (no
additional utility is achieved by repeating the task).
2.4.2 Conditional Policies
As defined earlier, the policy solution to a RC-TI-
DEC-HMDP is a set of individual policies, one per
agent. In fact, an agent policy is solution to an under-
lying HMDP (Becker et al., 2004). There is no need
to define this HMDP here. What we are interested in
is the form taken by an HMDP policy, in general.
Most traditional planners assume a discrete state-
space and a small number of action outcomes. When
the model is formalized as an MDP, the planner
can decide on discrete action outcomes. The policy
branches on discrete action outcomes. A policy thus
reads from state n
0
and action a
0
, when action out-
come is o
i
, do action a
i
; else when action outcome is
o
j
, do action a
j
; .... A MDP solution policy is pic-
tured on the left-hand side of figure 2.
When the model includes continuous resources
and is modeled as an HMDP, a consequence of over-
subscription is that a HMDP policy is conditional
upon resources. Thus the planner must branch not
only on the discrete action outcomes, but on the avail-
ability of continuous resources. In this case, a policy
reads from discrete state n
0
, continuous resource x
0
and action a
0
, when action outcome is o
i
, then if con-
tinuous resource is x
i
≤ x
∗
i
1
, do action a
i
1
, else if con-
tinuous resource is x
∗
i
1
< x
i
< x
∗
i
2
, do action a
i
2
, etc...;
else when action outcome is o
j
.... The right-hand side
of figure 2 pictures a portion of an HMDP policy.
2.4.3 Observation, Collaboration and
Computation
Now, the important point is that each branch of an
HMDP policy calls for an observation of the agent re-
source state. Each observation is to be carried out at
execution time. Because of the oversubscribed nature
of the planning problem, each agent has to make a
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
296

Table 1: Empirical measures and related information on the underlying planning problem.
Empirical measure Information
OCS Dependency of one agent on the other agents’ policies
Local plans studied Dependency of agent on the other agents’ policies.
Complexity of the local decision problem.
Joint policies studied Computational difficulty of finding of the joint controller.
Dependencies among all agents.
Branches in the optimal joint policy Observations of their local resource states by the agents.
Size of the optimal joint policy Repartition of goals (rocks) among agents.
Discretization (number of pieces) Complexity of the decision problem (local or global).
certain number of observations before deciding which
goals to achieve. In the multiagent framework, the
collaboration among agents and its possible penal-
ties affects the repartition of goals, and thus the need
for observation of its resource state by each agent.
As a consequence, this also affects the computational
weight of finding an optimal policy for a team of
agents. The rest of this paper reports on the results
of a series of simulations and tests that yield empir-
ical evidences of the relation between collaboration,
observation and computation.
3 COMPUTATION AND
COMPLEXITY
3.1 Solving RC-TI-DEC-HMDPs
Here we give a little background on the solving of an
m-agents RC-TI-DEC-HMDPs. The Cover Set Algo-
rithm (CSA) is an efficient algorithm that finds opti-
mal policies (Becker et al., 2004; Petrik and Zilber-
stein, 2007). It is a two steps algorithm. The first
step consists in finding a set of policies for each of
(m − 1) agents, called the optimal cover set (OCS).
Each agent’s OCS is such that for any of the other
agent’s policies it contains at least a policy that is op-
timal. In other words, the OCS of an agent is guaran-
teed to contain the optimal policy for this agent that
belongs to the optimal policy for the team. In com-
puting the OCS for an agent, the CSA has to study
a number of competing local policies for this agent.
This number yields an information on the dependency
of the agent w.r.t. the other agent policies. The second
step iterates all combinations of policies in the (m−1)
OCS, computes an optimal policy for the m-th agent,
and returns the combination of m policies that yields
the maximal expected global value (2). Table 1 sums
up the empirical measures and their information on
the underlying planning problem.
Computationally, the challenging aspect of solv-
ing an HMDP is the handling of continuous variables,
and particularly the computation of the so-called Bell-
man optimality equation. At least two approaches,
(Feng et al., 2004) and (Li and Littman, 2005) ex-
ploit the structure in the continuous value functions
of HMDPs. Typically these functions appear as a col-
lection of humps and plateaus, where the later corre-
spond to a region in the continuous state space where
similar goals are pursued by the policy. The steepness
of the slope between plateaus reflects the uncertainty
in achieving the underlying goals. The algorithms
used for producing the results analyzed in this paper
exploit a problem structure where the continuous state
can be partitioned into a finite set of regions. Tak-
ing advantage of the structure relies on grouping those
states that belong to the same plateau, while dynam-
ically scaling the discretization for the regions of the
state space where it is most useful such as in between
plateaus. It follows that the dynamic discretization of
the continuous state-space reflects the complexity of
the decision problem: the less discretized pieces, the
easiest the decision, see Table 1.
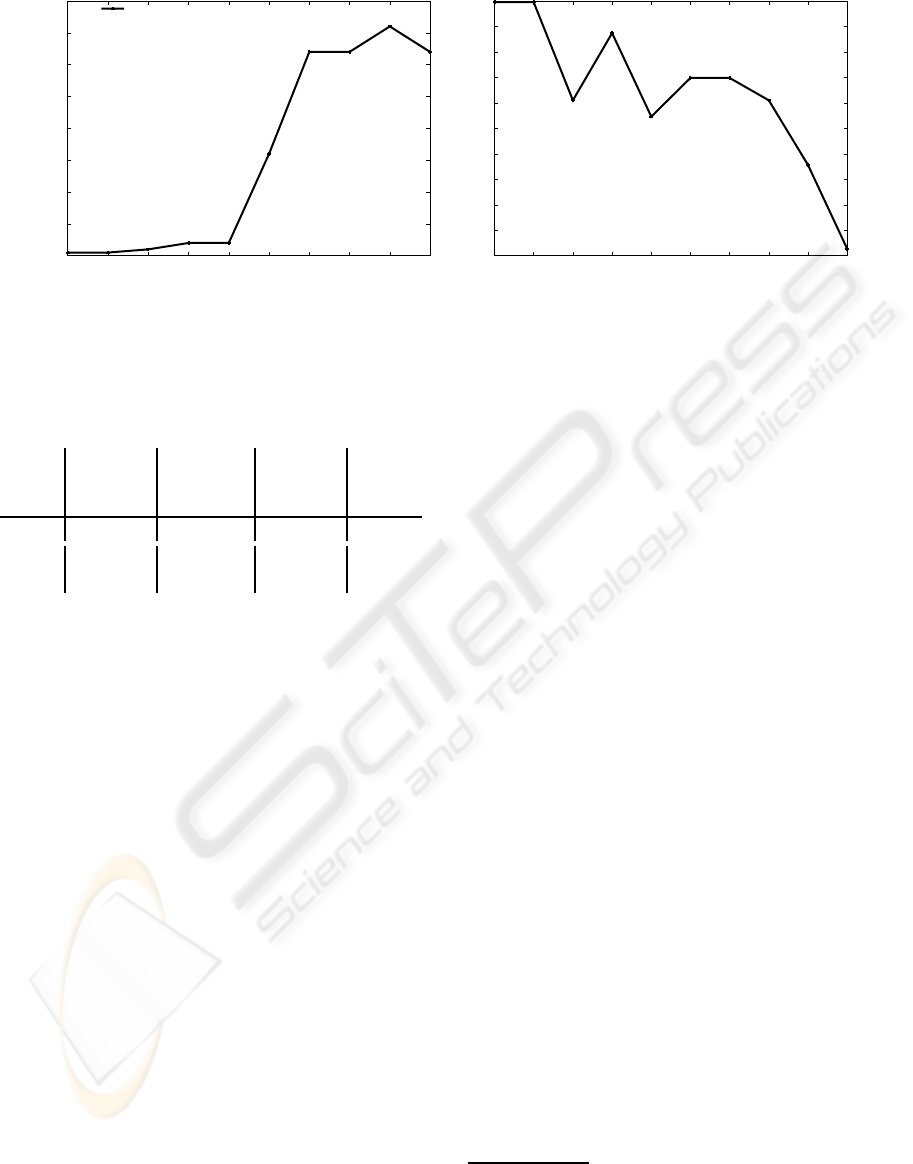
3.2 Empirical Evidences
This section reports on planning for our case-study.
It helps understanding the relation between collabo-
ration and computation. Figure 3 reports on the com-
putation of the optimal joint policy. Figure 3(a) shows
the number of joint policies studied for selecting the
optimal joint policy. This number jumps with the re-
duction of the collaboration factor among agents that
is implicitely carried by the joint reward structure.
One hypothesis is that the problem becomes globally
more computational when the amount of collabora-
tion among agents is reduced. In fact, this hypothesis
is confirmed by the results on figure 3(b). The number
of discretized regions in the optimal four-dimensional
global value function reflects the discretization of the
optimal value functions of individuals. The finer the
discretization, the more complex and thus the more
COLLABORATION VS. OBSERVATION: AN EMPIRICAL STUDY IN MULTIAGENT PLANNING UNDER
RESOURCE CONSTRAINT
297
0
10
20
30
40
50
60
70
80
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
joint policies
β
total
(a) Number of studied joint policies.
100
200
300
400
500
600
700
800
900
1000
1100
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
tiles in the 4D global value function
β
(b) Dynamic discretization of the optimal global value
function.
Figure 3: Case-study: joint policy computation.
Table 2: Case-study: Optimal joint policy.
β local
policies
studied
joint pol-
icy size
branches unused
agents
1 113256 17 5 1
0.9 89232 20 5 0
<0.9 68640 > 20 5 0
difficult the decision problems at the level of indi-
vidual agents. The very clear drop in the number of
regions with the reduction of the collaboration fac-
tor among agents corroborates our hypothesis: low
collaboration puts the stress on the global controller
and relieves the individuals. On the opposite, when β
moves toward 0 and collaboration is high, each agent
has an incentive to visit all rocks.
Fact 1. The computational difficulty of finding the
global controller for a team of resource constrained
agents is a decreasing function of their collaboration
factor.
Table 2 characterizes the optimal joint policy for
our case-study. These numbers confirm the trend ob-
served in other figures: agents involved in less collab-
orative problems (i.e. β ≈ 1) are more dependent on
the strategies of others since they are forced to avoid
the goals possibly achieved by others.
Interestingly, for β = 1, agent 1 is useless, that
is its policy is empty. In fact, agent 1 is dominated,
i.e. the two other agents do what it does, and do it
better. This is an indication that in larger problems,
with more agents, heavy computations might lead to
a empty optimal policies for certain agents. The next
section studies the number of branches and the rela-
tion between collaboration and observation.
4 COLLABORATION AND
OBSERVATION
In this section we empirically study the relation be-
tween collaboration and the need for observation at
agent level. To this end, we have considered a five
rocks, two agents problem in the Mars rovers do-
main. We have varied the collaboration factor β for
this problem. Figure 4(a) reports on the number of
branches in the optimal joint policy for β ∈ [0, 1]. The
number of branches is the number of times the policy
asks for an observation of the level of continuous re-
sources before acting. We see a four times increase
of the number of branches, which reflects a growing
need for the individual agents to observe their internal
resource state and cast away uncertainty
1
.
Fact 2. The number of observations required by the
optimal policy of a team of resource constrained
agents is a decreasing function of their collaboration
factor.
Now, consider figure 4(b) that shows the num-
ber of local policies that are studied decreases when
β increases. This number is a function of two vari-
ables: i/the discretization of the continuous space;
ii/the structural dependency on other agent strategies.
Figure 4(c) shows that the size of the coverage set of
agent 1. It shows that the number of policies in the
OCS of agent 1 augments, and does not significantly
decreases when β increases. This means that agent 1
grows more dependent on agent 2 when β increases.
This is because when collaboration becomes more pe-
1
The ratio (branches/number of actions in the optimal
joint policy) remains rather constant, thus reflecting the
structure of the problem: in most cases decision is taken
before navigation to a rock.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
298

0
50
100
150
200
250
0 0.2 0.4 0.6 0.8 1
Branches in the optimal joint policy
β
(a) Number of branches in the optimal joint policy.
2500
3000
3500
4000
4500
5000
5500
6000
0 0.2 0.4 0.6 0.8 1
Local policies studied
β
(b) Number of studied local policies for agent 1.
0
5
10
15
20
25
30
35
0 0.2 0.4 0.6 0.8 1
size of the OCS of agent 1
β
(c) Number of policies in the OCS of agent 1.
9.4
9.6
9.8
10
10.2
10.4
10.6
10.8
11
11.2
11.4
11.6
0 0.5 1 1.5 2
Mean HMDP solving time (sec)
β
(d) Mean time needed to solve agent 1 local policies.
Figure 4: Collaboration vs. Observation: report on a 2 agents, 5 rocks problem from the Mars rovers domain.
nalized, agent 1 has to be increasingly aware of agent
2’s strategy before it takes action, thus mitigating its
potentially negative effect on the global reward.
It follows from i/ and ii/ that this is the discretiza-
tion of the continuous space that becomes less dense
when β increases. Equivalently, this indicates that the
underlying local decision problems are less complex.
Less formally, this means that the world becomes
increasingly sharper for the individual agents, with
value functions that exhibit more plateaus and less
slopes. Metaphorically, the world, as seen by each in-
dividual agent, turns into a black & white decisional
space, where rocks must be clearly partitioned among
agents, and collaboration tends to be avoided. In other
words, there is less room for uncertainty, and risk is
agressively eliminated, as early as possible. This cor-
relates naturally with the higher number of observa-
tions required by the optimal joint policy. Each ob-
servation disambiguates the reachability of each rock
and sharpens the view of an otherwise very stochastic
world.
Fact 3. The complexity of the agent local decision
problems is an increasing function of their collabora-
tion factor.
In parallel, since local decision is sharper, it in-
creasingly needs to be articulated with that of other
agents. A consequence is that with increasing β, the
decisional stress is increasingly shifted to the global
controller. We had already noticed this behavior in
section 3. Here we choose to observe the side-effect
that is a relief of the computational weight that is put
on individual agents. Figure 4(d) shows the mean
time needed to solve an augmented HMDP for dif-
ferent values of β. The sudden decrease indicates the
decisional shift from the local controllers to the global
controller.
Fact 4. A decrease in the collaboration factor for a
team of resource constrained agents implies a shift of
the computational weight from the local controllers to
the global team controller.
To summarize, agents, each with eclectic abilities,
acting in a specialized world in which collaboration is
not well valued, are forced to agressively decide upon
their objectives more often, while the final computa-
tional burden is shifted to the global controller that
governs them.
COLLABORATION VS. OBSERVATION: AN EMPIRICAL STUDY IN MULTIAGENT PLANNING UNDER
RESOURCE CONSTRAINT
299

5 CONCLUSIONS
We have reported on an empirical study of the con-
nections between collaboration, computation and the
need for observation in optimal policies for resource
constrained multiagent problems. These problems
well model number of real-world situations for mod-
ern teams of robots. This includes our application do-
main, that of team of exploratory rovers.
We have defined the collaboration as the positive
value given to interactions among agents in a team.
Interestingly, we could show that the need for obser-
vation is a decreasing function of the collaboration
among agents. We can sum up our empirical find-
ing by considering a world where the division of la-
bor is extreme, and collaboration not much valuable.
In this world, resource constrained individuals with
eclectic abilities (i.e. that are equally able with every
task), are stressed to take sharp decisions, more of-
ten, and based on recurrent observations of their own
resources.
REFERENCES
Becker, R., Zilberstein, S., Lesser, V., and Goldman,
C. (2004). Solving transition independent decen-
tralized markov decision processes. Journal of
Artificial Intelligence Research, 22.
Bernstein, D., Givan, R., Immerman, N., and Zilber-
stein, S. (2002). The complexity of decentralized
control of markov decision processes. Mathe-
matics of Operations Research, 27(4).
Boutilier, C., Dean, T., and Hanks, S. (1999).
Decision-theoretic planning: Structural assump-
tions and computational leverage. Journal of Ar-
tificial Intelligence Research, 11.
Feng, Z., Dearden, R., Meuleau, N., and Washing-
ton, R. (2004). Dynamic programming for struc-
tured continuous Markov decision problems. In
Proceedings of the Twentieth International Con-
ference on Uncertainty In Artificial Intelligence,
pages 154–161.
Li, L. and Littman, M. (2005). Lazy approximation
for solving continuous finite-horizon mdps. In
Proceedings of the Twentieth National Confer-
ence on Artificial Intelligence.
Petrik, M. and Zilberstein, S. (2007). Anytime co-
ordination using separable bilinear programs. In
Proceedings of the Twenty Second National Con-
ference on Artificial Intelligence.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
300
