
INFORMATION SYSTEM PROCESS INNOVATION
EVOLUTION PATHS
Erja Mustonen-Ollila
Lappeenranta University of Technology, Department of Information Technology, P.O. Box 20
FI-53851 LAPPEENRANTA, Finland
Jukka Heikkonen
Helsinki University of Technology, Department of Biomedical Engineering and Computational Science (BECS)
P.O. Box 9203, FI-02015 TKK, Finland
Keywords: Empirical research, Longitudinal study, Case Study, IS process innovations, Evolution paths.
Abstract: This study identifies Information System process innovations’ (ISPIs) evolution paths in three organisations
using a sample of 213 ISPI development decisions over a period that spanned four decades: early
computing (1954-1965); main frame era (1965-1983); office computing era (1983-1991), and distributed
applications era (1991-1997). These follow roughly Friedman’s and Cornford’s categorisation of IS
development eras. Four categories of ISPI’s are distinguished: base line technologies, development tools,
description methods, and managerial process innovations. Inside the ISPI categories ISPI evolution paths
are based on the predecessor and successor relationships of the ISPIs over time. We analyse for each era the
changes and the dependencies between the evolution paths over time. The discovered dependencies were
important in understanding that the changes on ISPIs are developed through many stages of evolution over
time. It was discovered that the dependencies between the evolution paths varied significantly according to
the three organisations, the four ISPI categories, and the four IS development eras.
1 INTRODUCTION
We shall define IS process innovation (ISPI) as any
new way of developing, implementing, and
maintaining information systems in an
organisational context (Swanson, 1994). In
Swanson’s (1994) terminology, ISPIs cover both
technological (Type Ia, tool innovations (TO) and
core technology innovations (T)) as well as
administrative innovations (Type Ib, management
innovations (M) and description innovations (D). In
addition to above concepts an important concept
defined is development units. Development units are
generally: “regions involved as part of the setting of
interaction, having definite boundaries, which help
to concentrate interaction in one way or another”
(Giddens, 1984, p. 375). We denote development
units as locales.
One aspect in ISPI evolution is the dynamics in
the development practices, i.e. how the set of ISPIs
used changes over time in locales (Friedman and
Cornford, 1989). Based on Friedman and Cornford
(1989) we classify ISPIs into several eras. We will
recognise accordingly four ISPI generations. The
first generation (from the late 1940s until the mid
1960s) is largely hampered by “hardware
constraints”, i.e. hardware costs and limitations in its
capacity and reliability. The second generation
(from the mid 1960s until the early 1980s), in turn,
is characterised by “software constraints”, i.e. poor
productivity of systems developers and difficulties
of delivering reliable systems on time and within
budget. The third generation (early 1980s to the
beginning of 1990s), was instead driven by the
challenge to overcome “user relationships
constraints”, i.e. system quality problems arising
from inadequate perception of user demand and
resulting inadequate service. Finally, the fourth
generation (from the beginning of 1990s) was
affected by “organisational constraints”. In the latter
case the constraints arise from complex interactions
171
Mustonen-Ollila E. and Heikkonen J. (2008).
INFORMATION SYSTEM PROCESS INNOVATION EVOLUTION PATHS.
In Proceedings of the Tenth International Conference on Enterprise Information Systems - ISAS, pages 171-178
DOI: 10.5220/0001667401710178
Copyright
c
SciTePress

between computing systems and specific
organisational agents including customers and
clients, suppliers, competitors, co-operators,
representatives and public bodies (Friedman and
Cornford, 1989). In this study time generation one is
1954-1965; generation two is 1965-1983; generation
three is 1983-1991; and generation four is 1991-
1997.
After Tolvanen (1998) ISPI evolution is defined
as how the general requirements are adapted into the
ISD situation in hand. ISPI subcategories inside the
four ISPI categories are denoted as ISPI evolution
paths, and they are based on the predecessor and
successor relationships of the ISPIs over time
(Smolander et al., 1989). The relationship means
that an ISPI is based more or less on the previously
existing and used ISPI. The successor of an ISPI
follows after the ISPI predecessor on time.
2 FIELD STUDY ON ISPI
EVOLUTION PATHS
In our longitudinal study three Finnish organisations
were used as case examples over a 43-year time
period. Our investigation is crucial for ascertaining
how the ISPI evolution paths were changed and
were dependent from each other involving a
longitudinal perspective with several organisational
environments. For studying how the dependencies
of the ISPI evolution paths inside the four ISPI
categories changed over time Table 1 was created
from the data.
We chose a qualitative case study (Laudon,
1989; Johnson, 1975; Curtis et al., 1988) with a
multi-site study approach, where we investigated
three organisational environments, known here as
companies A, B, and C. Our study forms a
descriptive case study (Yin, 1993): it embodies time,
history and context, and it can be accordingly
described as a longitudinal case study, which
involves multiple time points (Pettigrew, 1985,
1989, 1990). Research approach followed
Friedman’s and Cornford’s (1989) study, which
involved several generations and time points.
Because the bulk of the gathered data was
qualitative, consisting of interviews and archival
material, we adopted largely historical research
methods (Copeland and McKenney, 1988; Mason et
al., 1997a, 1997b). Our definitions of ISPI evolution
paths for ISPI development decisions formed the
basis for interviews and collection of archival
material. Empirical data contained tape-recorded
semi-structured interviews dealing with the
experiences from developing and using ISPIs, and
archival files and collected system handbooks,
system documentation and minutes of meetings
(Järvenpää, 1991). We thus used triangulation to
verify veracity of data by using multiple data
sources, and arranged the obtained data is a
manuscript.
Using the validated information retrieved from
the manuscript, a table was organized for each
incidence of an ISPI: a description of the company,
the year when the development decision was made;
Table 1: ISPI evolution paths.
ISPI categories (D, M, TO, T) ISPI subcategories inside the ISPI categories: evolution paths EVO1 to EVO4
Description methods (D) EVO1: Wall technique/wall picture and entity analysis
EVO2: Methods for strategic development (function processes, re-engineering)
denoted as process modelling approaches
EVO3: Design methods and techniques, such as Object Modelling Technique
(OMT), Object Orientation (OO) etc.
Project management and control
procedures (M)
EVO1: Phase models
EVO2: Project instructions and management
EVO3: Standards and instructions
Development tools (TO) EVO1: CARELIA, Visual Basic (VB), CAREL etc.
EVO2: Application Development Workbench (ADW) , S-Designer, Power-Designer
EVO3: Data communication tools
EVO4: Database handling tools and databases
Technology innovations (T) EVO1: Programming languages
EVO2: Query languages
EVO3: Modular computing: programming procedures, and techniques
EVO4: Operating environment tools (different tools for different environments)
ICEIS 2008 - International Conference on Enterprise Information Systems
172

the IS project; the locale; an incidence of the
evolution path in each of the development was
made; the IS project; the locale; an incidence of the
evolution path in each of the development decisions.
Thus, we found 213 development decisions where
they were present. Then the data set was converted
into a data matrix based on the presence of a specific
feature. For a single development decision, called s
sample the maximum number of ISPI evolution
paths was four. The data consisted of 26 binary
variables: 14 variables for ISPI evolution paths
(“wall technique/wall picture and entity analysis” to
“operating environment tools (different tools for
different environments”), three variables for three
locales, three variables for four time generations,
four variables for the four ISPI categories, and one
variable for internally or externally developed
ISPIS. The presence of feature was denoted by 1 and
absence by 0 (like c.f. Ein-Dor and Segev, 1993).
(ISPI time generation one was left out due to lack of
data).
From these 26 variables 14 were selected as
independent variables which were used to explain
the rest of the 12 dependent variables. The
independent variables were (1) Description methods
EVO1: wall technique/wall picture and entity
analysis, (2) Description methods EVO2: methods
for strategic development, denoted as process
modelling approaches, (3) Description methods
EVO3: design methods and techniques, such as
OMT, OO etc., (4) Project management and control
procedures EVO1: phase models, (5) Project
management and control procedures EVO2: project
instructions and management, (6) Project
management and control procedures EVO3:
standards and instructions, (7) Development tools
EVO1: Carelia, Visual Basic, Carel etc, (8)
Development tools EVO2: ADW, S-designer,
power-designer, (9) Development tools EVO3: data
communications tools, (10) Development tools
EVO4: database handling tools and databases, (11)
Technology innovations EVO1: programming
languages, (12) Technology innovations EVO2:
query languages, (13) Technology innovations
EVO3: modular computing (programming
procedures and techniques), and (14) ISPI
Technology innovations EVO4: operating
environment tools. The reason for this selection of
the independent and dependent variables was based
on our research question.
The variation in the dependencies in the ISPI
evolution paths was modelled with the component
plane and the U-matrix (unified distance matrix)
representations of the Self-Organizing Map (SOM)
(Kohonen, 1989, 1995; Ultsch and Siemon, 1990).
The SOM is a vector quantisation method to map
patterns from an input space V
I
onto typically lower
dimensional space V
M
of the map such that the
topological relationships between the inputs are
preserved. This means that the inputs, which are
close to each other in input space, tend to be
represented by units (codebooks) close to each other
on the map space which typically is a one or two
dimensional discrete lattice of the codebooks. The
codebooks consist of the weight vectors with the
same dimensionality as the input vectors. The
training of the SOM is based on unsupervised
learning, meaning that the learning set does not
contain any information about the desired output for
the given input, instead the learning scheme try to
capture emergent collective properties and
regularities in the learning set. This makes the SOM
especially suitable for our type of data where the
main characteristics emerging from the data are of
interest, and the topology-preserving tendency of the
map allows easy visualisation and analysis of the
data.
Training of the SOM can be either iterative or
batch based. In the iterative approach a sample,
input vector x(n) at step n, from the input space V
I
, is
picked and compared against the weight vector w
i
of
codebook with index i in the map V
M
. The best
matching unit b (bmu) for the input pattern x(n) is
selected using some metric based criterion, such as
⎪⎪x(n)-w
b
⎪⎪ = min
i
⎪⎪ x(n)-w
i
⎪⎪, where the parallel
vertical bars denote the Euclidean vector norm. The
weights of the best matching and the units in its
topologic neighbourhood are then updated towards
x(n) with rule w
i
(n+1) = w
i
(n) +
α
(n) h
i,b
(n) (x(n)
– w
i
(n)), where i
∈
V
M
and 0
≤α
(n)
≤
1 is a scalar
valued adaptation gain. The neighbourhood function
h
i,b
(n) gives the excitation of unit i when the best
matching unit is b. A typical choice for h
i,b
(n) is a
Gaussian function. In batch training the gradient is
computed for the entire input set and the map is
updated toward the estimated optimum for the set.
Unlike with the iterative training scheme the map
can reach an equilibrium state where all units are
exactly at the centroids of their regions of activity
(Kohonen, 1995). In practice batch training can be
realised with a two step iteration process. First, each
input sample is assigned best matching unit. Second,
the weights are updated with
w
i
=
∑
x
h
i,b(x)
x /
∑
x
h
i,b(x)
. When using batch training
usually little iteration over the training set are
sufficient for convergence. In our experiences we
INFORMATION SYSTEM PROCESS INNOVATION EVOLUTION PATHS
173

used batch learning scheme.
According to the experiences it is desirable to
divide the training into two phases: 1) initial
formation of a coarsely correct map, and 2) final
convergence of the map. During the first phase the
width of the function h
i,b(x)
should be large as well as
the value of
α
should be high. The purpose of the
first stage is to ensure that a map with no
``topological defects'' is formed. During learning
these two parameters should gradually decrease
allowing finer details to be expressed in the map.
However, in most cases these choices are not so
crucial, because the method tends to perform well
for a wide range of parameter settings.
The mathematical properties of the SOM
algorithm have been considered by several authors
(e.g. Kohonen, 1989, 1995; Luttrell, 1989; Cottrel,
1998). Briefly, it has been shown that after learning
the weight vectors in the map with no “topological
defects” specify the centers of the clusters covering
the input space and the point density function of
these centers tends to approximate closely the
probability density function of the input space. Such
mapping, of course, is not necessarily unique.
The basic SOM based data analysis procedure
typically involves training a 2-D SOM with the
given data, and after training, various graphs are
plotted and qualitatively or even quantitatively
analysed by experts. The results naturally depend on
the data, but in the cases, where there are clear
similarities and regularities in the data, these can be
observed by the formed pronounced clusters on the
map. These observable clusters can provide clues to
the experts on the dependencies and characteristics
of the data, and some data clusters of particular
interest can be picked for further more detailed
analysis. To help this type of exploratory analysis, a
typical visualisation step is so called component
plane plotting (Kohonen, 1995), where the
components of codebook vectors are drawn in the
shape of the map lattice. By looking component
planes of two or more codebook variables it is
possible to observe the dependencies between the
variables. The above type of component plane
analysis was performed on the data analysed here.
The U-matrix (unified distance matrix)
representation of the SOM (Ultsch and Siemon,
1990) visualises the distances between the neurons,
i.e. codebooks. The distance between the adjacent
neurons is calculated and presented with different
colours. If a black to white colouring schema is used
typically a dark colour between the neurons
corresponds to a large distance and thus a gap
between the codebooks in the input space. A dark
colouring between the neurons signifies that the
codebook vectors are close to each other in the input
space. Dark areas can be thought of as clusters and
light areas as cluster separators. In our case we used
blue to red colouring schema for better visualization
properties; blue colour corresponds to a shorter
distance and red to a larger one whereas yellow
colour between those as shown by colour bar in each
U-matrix figure. This U-matrix representation can
be a helpful when one tries to find clusters in the
input data without having any prior information
about the clusters. Of course, U-matrix does not
provide definite answers about the clusters, but it
gives clues regarding what similarities (clusters)
there may be in the data by revealing possible
cluster boundaries on the map. Teaching SOM and
representing it with the U-matrix offers a fast way to
get insight on the data distribution. A simple
algorithm for a U-matrix is as follows. For each
node in the map, compute the average of the
distances between its weight vector and those of its
immediate neighbours. The average distance is a
measure of a node's similarity between it and its
neighbours.
The SOM map was trained with the data
consisting of 213 samples were each sample
consisted of 14 independent variables (i.e. input
space dimensionality is 14). After training, the dark
units (the low values of the U-matrix) of the SOM
represent the clusters, and light units (the high
values of the U-matrix) represent the cluster borders.
3 RESEARCH FINDINGS AND
ANALYSIS
Our main research problem was to investigate “How
have the dependencies in the evolution paths inside
the ISPI categories changed over time?” The U-
matrix visualises the distances between
neighbouring map units, and helps to see the cluster
structure of the map. The high values of the U-
matrix (light units) indicate a cluster border. The
elements of the same clusters are indicated by
uniform areas of low values (dark units) and thus
similar data is grouped together. The colour bar
indicates the colour and its meaning.
Figures 1-4 present the component planes and
the U-matrices of the SOMs of 4x6 units for the
ISPI categories M (project management and control
procedures), T (technology innovations), TO
(development tools), and D (description methods)
ICEIS 2008 - International Conference on Enterprise Information Systems
174

Figure 1: The component planes and the U-matrix in a SOM of 4x6 units in the ISPI category M.
respectively. ComA, ComB, and ComC are denoted
as Company A, B, and C respectively. Time
generation two, three, and four are denoted as Gen2,
Gen3, and Gen4 respectively. The variable IntExt
seen on the component plane figures shows if the
value of the variable is 1 (Int) or 0 (Ext), and thus
Int and Ext variables are complements to each other
The light green colour in a component plane
variable, such as in “EVO4 and ComC”, is constant
being 1 or 0, and it has no variation on the data. The
blue units (the low values of the U-matrix) of the
SOM represent the clusters, and the red units (the
high values of the U-matrix) represent the cluster
borders in the colour bar. Therefore the colour bars
show the values of the variables.
The data for time generation two was separated
from that of time generations three and four due to
our research question. Time generation one was left
out due to the lack of data.
From the U-matrix in Figure 1 one can clearly
see three clusters. The first cluster is situated in the
upper left corner of the U-matrix. The second cluster
is situated in the upper right corner of the U-matrix,
and the third cluster is situated in the lower right
corner of the U-matrix (blue color) for the ISPI
category M.
By looking at the variable values in these three
clusters, we observe the following dependencies
between the variables. In the first cluster, high
values exists in the variables EVO3 (standards and
instructions), ComA, and Gen2. In the second
cluster, high values exists in the variables EVO3
(standards and instructions), ComA and Gen2. In the
third cluster, high values exists in the variables
EVO2 (project instructions and management),
ComA, and Gen2. Thus, EVO3 (standards and
instructions) and EVO2 (project instructions and
management) were dependent on company A, and
time generation two in ISPI category M.
After investigating the U-matrix in the Figure 2
we discovered two clusters. The first cluster is in the
upper part of the U-matrix, and the second cluster is
in the lower part of the U-matrix (blue color).
Between these two clusters there is the cluster
border (red and yellow color).
By looking at the variable values in these two
clusters, we observe the following dependencies
between the variables. In the first cluster, high
values existed in the variables EVO4 (operating
environment tools), ComB, ComC, Gen3, and Gen4.
In the second cluster, high values existed in the
variables EVO1 (programming languages), EVO2
(query languages), EVO3 (modular computing),
ComA and Gen2.
Therefore, EVO1, EVO2, and EVO3 were
dependent on company A in the second time
generation in ISPI category T. EVO4 was dependent
both on company B in the time generation three, and
company C in the time generation four in ISPI
category T.
INFORMATION SYSTEM PROCESS INNOVATION EVOLUTION PATHS
175
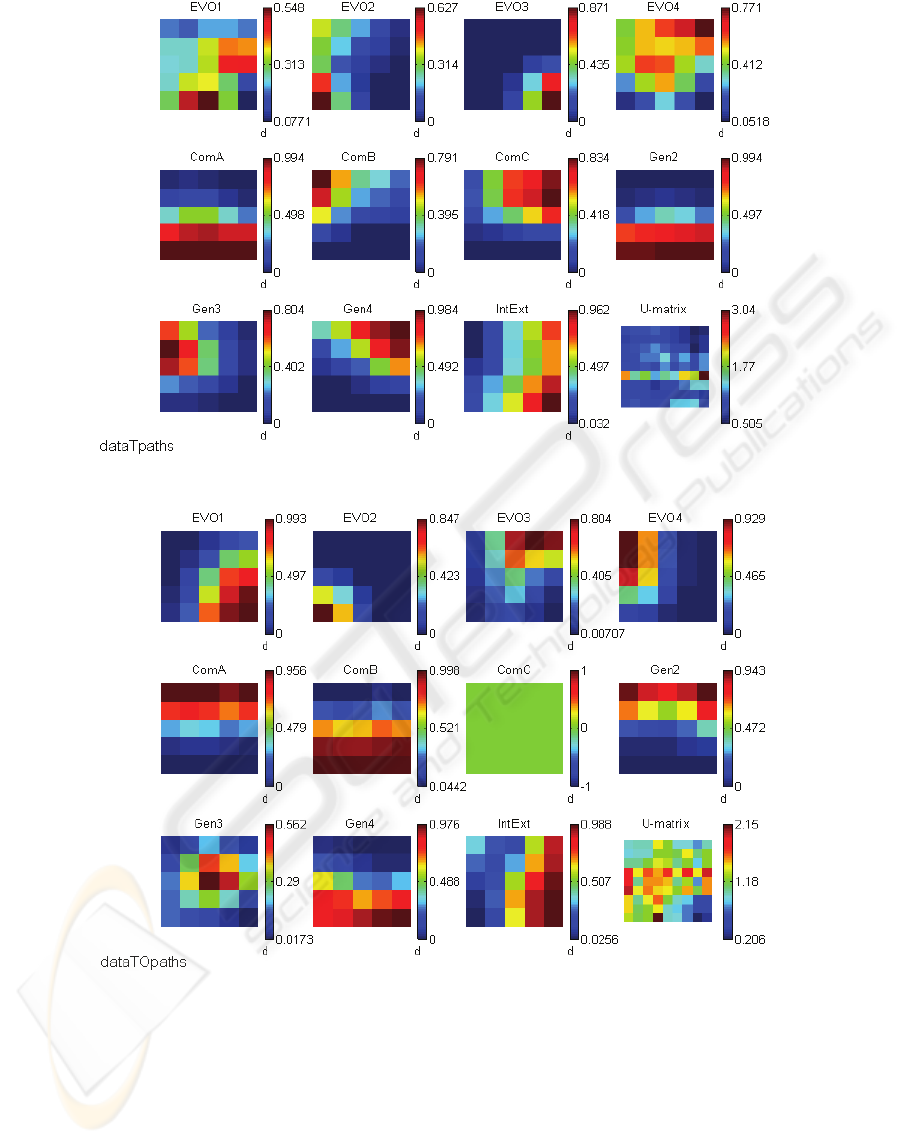
Figure 2: The component planes and the U-matrix in a SOM of 4x6 units in the ISPI category T.
Figure 3: The component planes and the U-matrix in a SOM of 4x6 units in the ISPI category TO.
After studying the U-matrix in the Figure 3 we
noticed only one cluster in the lower part of the U-
matrix (blue color). By looking at the variable value
in this single cluster, we observe that the following
dependencies between the variables existed: high
values existed in the variables EVO1 (Carelia,
Visual Basic, Carel etc.), ComB, and Gen4.
Thus, EVO1 was dependent on company B in
the fourth time generation in ISPI category TO.
In the Figure 4, the component planes (the
variables EVO1 to IntExt), and the U-matrix were
investigated and the three clusters are discovered.
The first cluster is in the upper left part of the U-
matrix, the second cluster is in the upper right part
of the U-matrix (blue color), and the third cluster is
in the lower right part of the U-matrix. Between
these three clusters there is the cluster border (red
and yellow color).
ICEIS 2008 - International Conference on Enterprise Information Systems
176

Figure 4: The component planes and the U-matrix in a SOM of 4x6 units in the ISPI category D.
By looking at the variable values in these three
clusters, we observe the following dependencies
between the variables. In the first cluster, high
values existed in the variables EVO1 (wall
technique/wall picture and entity analysis), ComA,
and Gen2. In the second cluster, high values existed
in the variables EVO2 (methods for strategic
development), ComA, and Gen2. In the third cluster,
high values existed in the variables EVO1, ComB,
and Gen4. Thus, EVO1, and EVO2 were dependent
on company A in the second time generation. EVO1
was dependent on company B in the fourth time
generation in ISPI category D.
4 DISCUSSION AND
CONCLUSIONS
Based on found clusters in the Figures 1, 2, 3, and 4
we discovered that the dependencies between the
evolution paths varied significantly according to the
companies A, B, and C, the four ISPI categories (M,
T, TO, and D), and the four time generations. Even
if we did not measure a correlation or a linear
relationship between the evolution paths, the
dependencies were discovered.
Our field study over time indicated that
evolution paths varied according to the time
generations and locales. Before the outsourcing in
1984 evolution paths were discovered from the
management and control procedures category,
technology innovation category, and description
methods category ISPIs. After outsourcing no
evolution paths were found in management control
procedures ISPIs, and companies B and C began to
concentrate on development tools, and technology
innovations. Therefore when comparing the
evolution paths in company A and B and C it was
discovered, that no evolution paths existed in
managerial control procedures and description
methods ISPI categories after the outsourcing. The
findings indicated that company B and C shifted
their interest to technology innovations and
development tools.
The present study has implications to the
practitioners, research, and methodology. An
important implication to methodology is the use of
multi method research approach. Even if our case
study has weaknesses, we produced a logical chain
of evidence with multiple data points. Using U-
matrix representation as the analysing tools was
proved to be suitable to the data analysis, even if
there is no study were such a method is previously
applied. Empirical research on how ISPI evolution
paths are changed and are dependent from each
other involving a longitudinal perspective with
several organisational environments and time
generations is lacking. ISPI evolution literature is
very rare. This longitudinal data is important,
INFORMATION SYSTEM PROCESS INNOVATION EVOLUTION PATHS
177

because a horizontal survey research would not have
given answers to our research question how ISPI
evolution paths were changed over time.
REFERENCES
Copeland, D.G., McKenney, J.L., 1988. Airline
Reservations Systems: Lessons from History, MISQ,
pp. 353-370.
Curtis, B., Krasner, H., Iscoe, N., 1988. A Field Study of
the software design process for large systems,
Communications of the ACM, Vol. 31, No. 11, pp.
1268-1287.
Ein-Dor, P., Segev, E., 1993. A Classification of
Information Systems: Analysis and Interpretation,
Information Systems Research, Vol. 4, No. 2, pp. 166-
204.
Friedman, A., Cornford D., 1989. Computer Systems
Development: History, Organization and
Implementation, John Wiley & sons.
Giddens, A., 1984. The Constitution of Society, Polity
Press.
Johnson, J. M., 1975. Doing field research, The Free
Press.
Järvenpää, S., 1991. Panning for Gold in Information
Systems Research: ‘Second-hand’ data”, Proceedings
of the IFIP TC/WG 8.2, Copenhagen, Denmark, 14-16
December, pp. 63-80.
Kohonen, T., 1989. Self-Organization and Associative
Memory, Springer-Verlag, Berlin, Heidelberg.
Kohonen, T., 1995. Self-Organized Maps. Berlin:
Springer-Verlag.
Laudon, K. C., 1989. Design Guidelines for Choices
Involving Time in Qualitative Research, Harward
Business School Research Colloquium, The
Information Systems Research Challenger: Qualitative
Research Methods, Vol. 1, pp. 1-12.
Luttrell, S. P., 1989. Self-Organization: A derivation from
first principles of a class of learning algorithms.
Proceedings of the IJCNN’89 International Joint
Conference On Neural Networks, Vol. 2, pp. 495–498.
Mason, R.O., McKinney, J.L., Copeland, D.C., 1997a.
Developing an Historical Tradition in MIS Research,
MISQ, Vol. 21, No. 3, pp. 257-278.
Mason, R.O., McKenney, J.L., Copeland, D.G., 1997b. A
Historical Method for MIS Research: Steps and
Assumptions, MISQ, Vol. 21, No. 3, pp. 307-320.
Pettigrew, A., 1985. The Wakening Giant, Continuity and
Change in ICI.
Pettigrew, A., 1989. Issues of Time and Site Selection in
Longitudinal Research on Change, Harward Business
School Research Colloquium, The Information
Systems Research Challenger: Qualitative Research
Methods, Vol. 1, pp. 13-19.
Pettigrew A.M., 1990. Longitudinal field research on
change: theory and practice, Organization Science,
Volume 1, No. 3, pp. 267-292.
Smolander, K., Lyytinen, K., Tahvanainen, V-P., 1989.
Family tree of methods (in Finnish), Syti-project,
(internal paper), University of Jyväskylä, Finland.
Swanson, E. B., 1994. Information Systems Innovation
Among Organizations, Management Science, Vol. 40,
No. 9, pp. 1069-1088.
Tolvanen, J-P., 1998. Incremental Method Engineering
with Modeling Tools: Theoretical Principles and
Empirical Evidence, Dissertation thesis, University of
Jyväskylä.
Ultsch, A., Siemon, H.P., 1990. Kohonen's self organizing
feature maps for exploratory data analysis. In
Proceeding of INNC'90, International Neural Network
Conference, pp. 305-308, Dordrecht, Netherlands,
Kluwer.
Yin, R.Y., 1993. Applications of Case Study Research,
Applied Social Research Methods series, Vol. 34,
SAGE publications.
ICEIS 2008 - International Conference on Enterprise Information Systems
178
