
FORECASTING WITH ARTMAP-IC NEURAL NETWORKS
An Application Using Corporate Bankruptcy Data
Anatoli Nachev
Information Systems, Dept. of Accountancy & Finance, National University of Ireland
Galway, Ireland
Keywords: Financial diagnosis, data mining, neural networks, ARTMAP-IC.
Abstract: Financial diagnosis and prediction of corporate bankruptcy can be viewed as a pattern recognition problem.
This paper proposes a novel approach to solution based on ARTMAP-IC - a general-purpose neural network
system for supervised learning and recognition. For a popular dataset, with proper preprocessing steps, the
model outperforms similar techniques and provides prediction accuracy equal to the best one obtained by a
backpropagation MLPs. An advantage of the proposed model over the MLPs is the short online learning,
fast adaptation to novel patterns and scalability.
1 INTRODUCTION
For a financial institution it important to evaluate
correctly the risk profile of a debtor. Wrong credit
decisions can have important consequences: the
refusal of a good credit can cause the loss of future
profit margins and the approval of a bad credit can
cause the loss of the interests and the principal
money. To estimate credit risk, banks usually apply
scoring systems, which takes into account factors,
such as leverage, earnings, reputation, etc. Due to
lack of metrics and subjectiveness in estimates,
sometimes decisions are unrealistic and not
consistent. Financial research has lead to numerous
studies and a variety of formal techniques for
classification of potential debtors into different
groups in terms of solvency.
1.1 Previous Research
Kumar and Ravi (2007) outline techniques for
financial diagnosis and bankruptcy prediction,
grouped into two broad categories - statistical and
intelligent. The statistical techniques include: linear
discriminant analysis; multivariate discriminate
analysis; quadratic discriminant analysis; logistic
regression (logit); and factor analysis. The group of
intelligent techniques include different types of
neural networks, most popular of which is the multi-
layer perception (MLP); probabilistic neural
networks; auto-associative neural network; self-
organizing map; learning vector quantization;
cascade correlation neural network; decision trees;
case-based reasoning; evolutionary approaches;
rough sets; soft computing (hybrid intelligent
systems); operational research techniques including
linear programming; data envelopment analysis;
quadratic programming; support vector machine;
fuzzy logic techniques, etc.
In their study, (Balcaen and Ooghe, 2004) found
many difficulties in performance of the statistical
techniques due to data anomalies, inappropriate
sample selection, matters related to non-stationarity
and instability of the data, unreasoned faith and trust
on the truth reflected within the financial statements
of the firms under consideration, inappropriate
selection of independent variables and wrong
consideration of the influence of time in the
modelling.
(Zhang et al., 1999) use neural networks to
model bankruptcy prediction and they illustrate links
to traditional Bayesian classification theory. The
study considers initially the five financial ratios
proposed by Altman (1968), joining later on
additional ones. The study also compares the
accuracy of neural networks against that of logistic
regression. The authors suggest that the neural
networks outperform the logistic regression. Atiya
(2001) concluded in his research that, in general, the
neural networks outperform statistical techniques
and suggested to try to improve the predictive ability
of the networks.
This paper proposed a novel approach to bankruptcy
prediction based on the ARTMAP-IC neural
167
Nachev A. (2008).
FORECASTING WITH ARTMAP-IC NEURAL NETWORKS - An Application Using Corporate Bankruptcy Data.
In Proceedings of the Tenth International Conference on Enterprise Information Systems - AIDSS, pages 167-172
DOI: 10.5220/0001680201670172
Copyright
c
SciTePress

networks, a member of the family of neural
networks based on the adaptive resonance theory
(ART). The paper is organized as follows:
Section 1 introduces the bankruptcy prediction
problem and outlines previous research in that area.
Section 2 presents the ART neural networks and
discusses the ARTMAP-IC algorithm and features.
Section 3 describes the experimental data and the
preprocessing steps needed to transform data into a
form proper for submission to the neural network.
Section 4 discusses the experimental results and
outlines advantages of the proposed model.
2 ARTMAP-IC NEURAL
NETWORK CLASSIFIER
In an ART-based network, information reverberates
between the network’s layers. Learning is possible
in the network, when resonance of the neuronal
activity occurs. ART1 was developed to perform
clustering on binary-valued patterns. By
interconnecting two ART1 modules, ARTMAP was
the first ART-based architecture suited for
classification tasks. ARTMAP- IC adds to the basic
ARTMAP system new capabilities designed to solve
the problem with inconsistent cases, which arises in
prediction, where similar input vectors correspond to
cases with different outcomes, (Carpenter,
Grossberg, and Reynolds, 1991), (Carpenter and
Markuzon, 1998). It modifies the ARTMAP search
algorithm to allow the network to encode
inconsistent cases (IC).
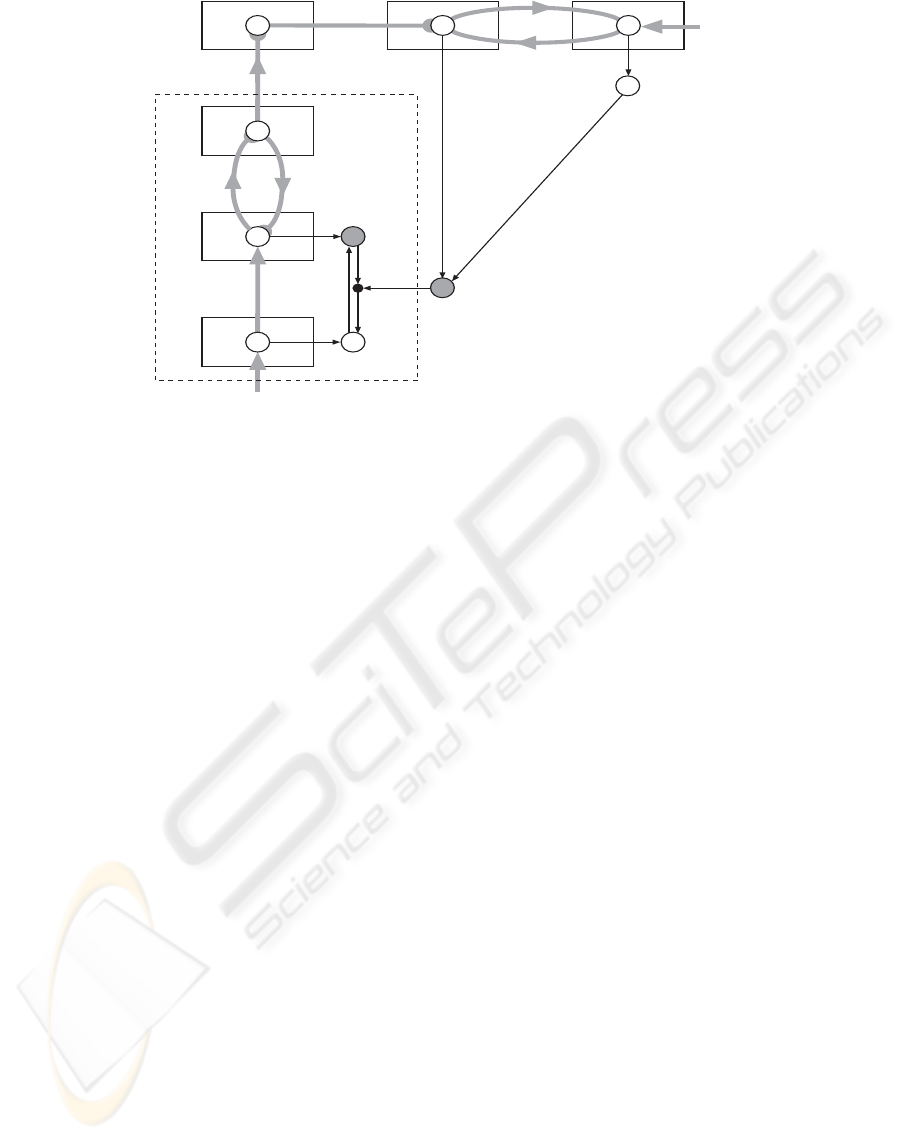
Figure 1, adapted from (Carpenter and
Markuzon, 1998), shows the architecture of an
ARTMAP-IC network. It consist of fully connected
layers of nodes: an M-node input layer F1, an N-
node competitive layer F2, an N-node instance
counting layer F3, an L-node output layer F
0
b
, and
an L-node map field F
ab
that links F3 and F
0
b
. In
ARTMAP-IC an input a=(a
1
, a
2
, … , a
M
) learns to
predict an outcome b=(b
1
, b
2
, …, b
L
), , where only
one component b
K
=1, placing the input a in class K.
With fast learning,
β
=1, ARTMAP-IC represents
category K as hyper-rectangle
ℜ
K
that just encloses
all the training set patterns a to which it has been
assigned. A set of real weights W={w
ji
: j=1,…,N;
i=1,…,M} is associated with the F1 - F2 layer
connections. Each F2 node j represents a category in
the input space, and stores a prototype vector
w
j
=(w
j1
, w
j2
, …,w
jM
). The F2 layer is connected,
through associative links to F3, which in turn is
connected to the map field F
ab
by associative links
with binary weights W
ab
=(w
jk
ab
:j=1,…,N; k=1,…,L}.
The vector w
j
ab
=(w
j1
ab
, w
j2
ab
, …,w
jL
ab
) relates F2
node j to one of the L output classes. Instance
counting biases distributed predictions according to
the number of training set inputs classified by each
F2 node. During testing the F2->F3 input y
j
is
multiplied by the counting weight c
j
to produce
normalized F3 activity, which projects to the map
field F
ab
for prediction.
2.1 ARTMAP-IC Algorithm
The following algorithm describes the operation of
an ARTMAP-IC classifier in learning mode:
1. Initialisation: Initially, all the neurons of F2
are uncommitted, all weight values w
ji
are initialised
to 1, and all weight values w
jk
of F
ab
are set to 0.
2. Input pattern coding: When a training pair
(a,b) is presented to the network, a undergoes pre-
processing, and yields pattern A=(A
1
,A
2
,…,A
2M
). The
vigilance parameter ρ is reset to its baseline value.
3. Prototype selection: Pattern A activates layer
F1 and is propagated through weighted connections
W to layer F2. Activation of each node j in the F2
layer is determined by the choice function
T
j
(A)=|A
∧
w
j
|/(
α
+|w
j
|). The F2 layer produces a
winner-take-all pattern of activity y=(y
1
,y
2
,…,y
N
)
such that only node j=J with the greatest activation
value remains active (y
J
=1). Node J propagates its
prototype vector w
J
back onto F1 and the vigilance
test |A
∧
w
j
|
≥ρ
M is performed. This test compares the
degree of match between w
J
and A to the vigilance
parameter
ρ∈
[0,1]. If this test is satisfied, node J
remains active and resonance is said to occur.
Otherwise, the network inhibits the active F2 node
and searches for another node J that passes the
vigilance test. If such a node does not exist, an
uncommitted F2 node becomes active and
undergoes learning (step 5).
4. Class prediction: Pattern b is fed directly to
the map field F
ab
, while the F2 activity pattern y is
propagated to the map field via associative
connections W
ab
. The latter input activates F
ab
nodes
according to the prediction function
∑
=
=
N
j
ab
jkj
ab
k
wyyS
1
)(
and the most active F
ab
node K yields the class
prediction (K=k(J)). If node K constitutes an
incorrect class prediction, a match tracking signal
raises vigilance just enough to induce another search
among F2 nodes (step 3). This search continues until
either an uncommitted F2 node becomes active
(learning ensues at step 5), or a node J that has
ICEIS 2008 - International Conference on Enterprise Information Systems
168
category
choice
category
choice
match
input
instance
counting
ART
a
reset
match
tracking
predictive
error
map field
output
b
a
F0
F1
F2
F3
F
ab
F
b
0
kk
J
i
J
i
r
r
ab
A
i
w
Ji
w
ij
x
i
y
J
y
J
c
J
w
Jk
b
k
Figure 1: Simplified ARTMAP-IC architecture.
previously learned the correct class prediction K
becomes active.
5. Learning: Learning input a involves updating
prototype vector w
J
, and if J corresponds to a newly-
committed node, creating a permanent associative
link to F
ab
. A new association between F2 node J
and F
ab
node K (K=k(J)) is learned by setting
w
Jk
ab
=1 for k=K, where K is the target class label for
a. Once the weights (W and W
ab
) have converged for
the training set patterns, ARTMAP can predict a
class label for an input pattern by performing steps
2, 3 and 4 without any testing. A pattern a that
activates node J is predicted to belong to the class
K=k(J)
3 DATA AND PREPROCESSING
For experiments we used data taken from the
Moody's Industrial Manual. The dataset contains
financial information for a number of years for a
total of 129 firms, of which 65 are bankrupt and the
rest are solvent. The data entries have been
randomly divided into two subsets: one for training,
made up of 74 firms, of which 38 bankrupt and 36
non-bankrupt; another set for testing, made up of 55
firms, of which 27 bankrupt and 28 non-bankrupt.
The dataset was used in other studies, e.g.
(Odom and Sharda 1993), (Rahimian et al. 1993),
(Serrano-Cinca 1996), (Wilson and Sharda 1994),
which allows comparing our results with those from
other techniques.
As the raw data contains many features that
describe financial health of firms, it is important to
reduce their number by using few financial ratios, or
variables, instead. Using few variables allows a
prediction technique to reduce the effect of
overfitting and to improve its ability to generalize
and predict. The variables have to be some linear or
nonlinear combinations of features. For our
experiments we adopted the proposed by Altman
(1968) set of five variables, namely:
1) Working Capital / Total Assets (WC/TA). In
general, a firm’s liabilities consist of current
liabilities and long term debt. The current liabilities
include short term loans (less than one year due),
accounts payable, taxes due, etc. The working
capital is current assets minus the current liabilities.
The current assets can or will typically be turned
into money fairly fast. The working capital is an
indication of the ability of the firm to pay its short
term obligations. A firm’s total assets are sum of the
firm’s total liabilities and shareholder equity (capital
raised in share offerings and the retained earnings).
It can be viewed as an indicator of its size and
therefore can be used as a normalizing factor.
2) Retained Earnings / Total Assets (RE/TA).
The retained earnings is the surplus of income
compared to expenses, or total of accumulated
profits since the firm commencement.
3) Earnings Before Interest and Taxes / Total
Assets (EBIT/TA). The firm’s earnings before
interests and taxes is also an important indicator.
Low or negative earnings indicate that the firm is
losing its competitiveness, and that endanger its
survival.
FORECASTING WITH ARTMAP-IC NEURAL NETWORKS - An Application Using Corporate Bankruptcy Data
169

4) Market Capitalization / Total Debt (MC/TD).
Market capitalization relative to the total debt
indicates that a firm is able to issue and sell new
shares in order to meet its liabilities. A large market
capitalization indicates a high capacity to perform
that.
5) Sales / Total Assets (S/TA). Total sales of a
firm, relative to the total assets, is an indicator of the
health of its business, but without certainty as it can
vary a lot from industry to industry.
3.1 Data Preprocessing
A problem with the dataset is that there are
significant differences between the typical variable
values. They differ by several orders of magnitude
due to the different units in which each of these is
expressed. Such an inconsistency would worsen the
prediction accuracy as the variables with large
values would dominate over those with small values.
In our case, the variables MC/TD and S/TA have
larger typical values than WC/TA, RE/TA, and
EBIT/TA. To reduce the effect of the inconsistency
we applied z-score transformation that returns a
centered and scaled version of the datasets. In fact,
the z-scoring returns the deviation of each variable
from its mean, normalized by its standard deviation.
The transformation considers each variable as
independent and uses the formula:
i
i
n
i
n
i
xx
x
σ
−
=
~
,
where
n
i
x
~
is the new value,
n
i
x is the original one,
∑
=
=
N
n
n
ii
x
N
x
1
1
∑
=
−
−
=
N
n
i
n
ii
xx
N
1
22
)(
1
1
σ
Another problem with the original dataset or its z-
scored version is that both cannot be used directly as
an ARTMAP-IC input as the input patterns have to
be M-dimensional vectors of floating point numbers
in the interval [0, 1]. The second preprocessing step,
called normalization maps the dataset values into [0,
1] using the formula:
)
~~
(
)
~
~
(
ˆ
minmax
min
ii
i
n
i
n
i
xx
xx
x
−
−
=
where
max
i
x
and
min
i
x
are the max, and min values
of the variable
i
x
, respectively. The normalization
additionally reduces the differences between values
preserving the dataset information.
4 EXPERIMENS
The experiments explored how an ARTMAP-IC
performs as a predictor of bankruptcy. The first goal
was to see if a further reduction of the dimensions
would improve the ability to predict and how. The
second goal was to identify the role of the network
parameters. Another goal was to measure the
training and testing times on order to estimate its
efficiency.
A further reduction of the dataset dimensions has
a potential to improve the predictions, as the
Altman’s set of five financial ratios does not
guarantee the best discrimination between the output
classes (solvent / insolvent). This is due to the fact
that a set of variables can overfit or overtrain the
network reducing or destroying its ability to
generalize. There are various techniques to estimate
discriminatory power of variables. Using univariate
F-ratio analysis, Serrano (1996) ranked the Altman’s
ratios and suggested that the second and third
variables have a greater discriminatory power in
contrast to the fifth one. The analysis, however, does
not provide information about the discriminatory
power of combinations of variables and possible
dependencies.
It is also the case that the optimal variable
selection is specific for each particular prediction
technique. There is no guarantee that the optimal set
for one technique would perform well with another.
Ideally, the optimal subset for a model can be found
by the exhaustive search approach that explores each
possible subset. If there are d possible variables,
then since each can be present or absent, we have a
total of 2
d
possible subsets. The five Altman’s
variables yield thirty one subsets, (all zeroes is
ignored), which is not too much in terms of
possibility to be explored. Taking into account the
above, we decided to adopt the exhaustive search to
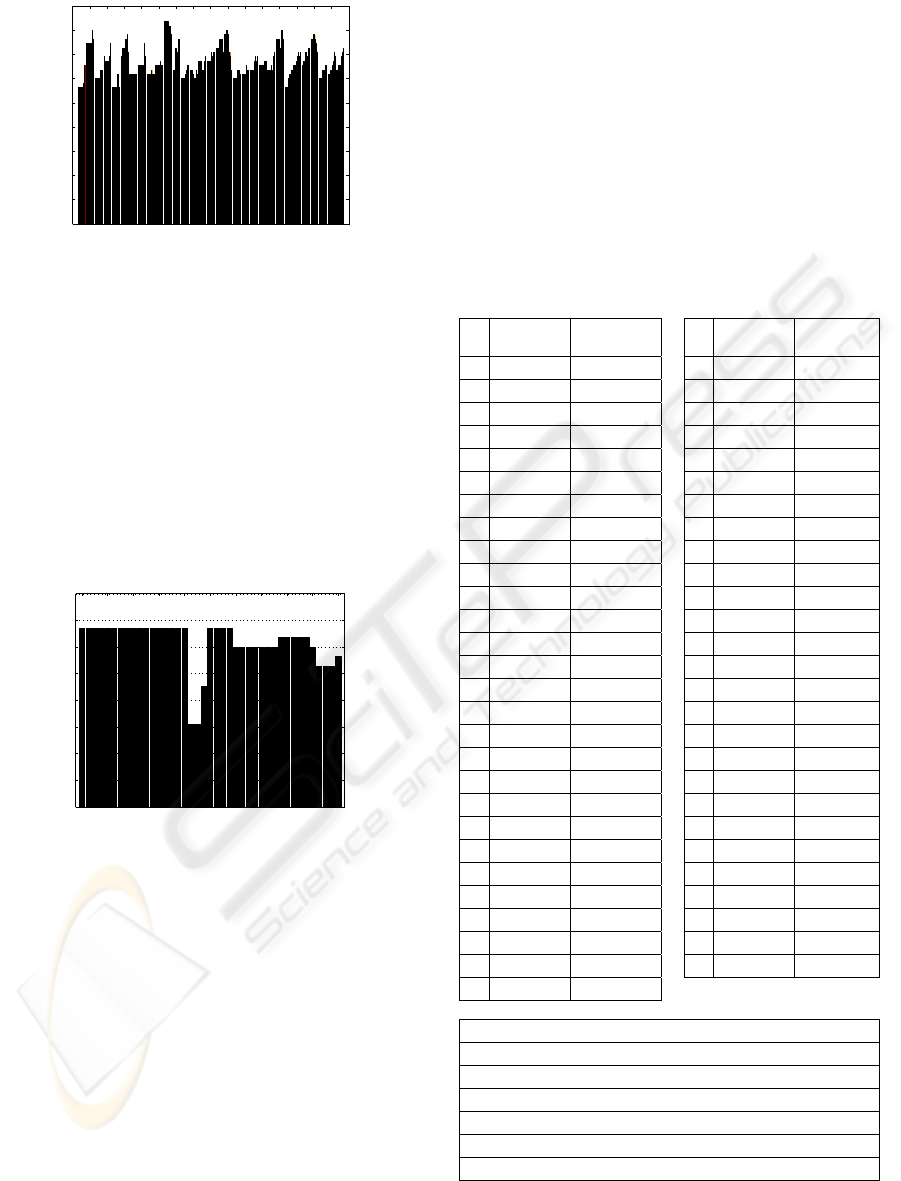
analyze the variable subsets and figure 2 shows the
results. Each bar presents a subset. The x axis shows
the subset indexes: 1 to 5 correspond to subsets of
individual variables; 6 to 15 – for pairs of variables;
16 to 25 – for triples; 26 to 30 – quartets; and 31 is
the whole set. Individual sub-bars within a bar
present the prediction accuracies with different
vigilance parameter values from 0 to 1 with an
increment of 0.025. The figure shows that the subset
with highest prediction accuracy is the 11-th one,
which consists of the variables {RE/TA, MC/TD}.
The figure also shows that these two variables are
best individual performers for the ARTMAP-IC (see
bars 2 and 4), so that when joined in a pair, the
resulting subset provides a greater discriminatory
power.
ICEIS 2008 - International Conference on Enterprise Information Systems
170
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 3
2
0
10
20
30
40
50
60
70
80
90
subset index
prediction accuracy %
Figure 2: Prediction accuracy of each of the variable
subsets using 41 values of the vigilance parameter.
An additional explanation of this fact can be found
from the correlation matrix of the dataset. If a
correlation value for two variables is close to 0, they
are uncorrelated, or independent, and combined
together provide a greater ability for discrimination
between the classes. The calculations show that the
two variables have correlation 0.11, which is one of
the lowest.
The experiments show that the prediction
accuracy of the 11
th
subset with certain values of the
vigilance parameter ρ is 83.6% (see figure 3).
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
50
55
60
65
70
75
80
85
90
vigilance parameter value
prediction accuracy %
Figure 3: Prediction accuracy of subset {RE/TA, MC/TD}
varying the vigilance parameter from 0 to 1 with
inclement 0.025.
This accuracy is equal to the best one obtained by an
MLP neural network in (Serrano 1996). Both
techniques used the same dataset. A comparison
between the ATRMAP-IC model and other
prediction techniques that have used the same
dataset can be seen in table 1. The ARTMAP-IC and
Serrano’s MLP misclassify 9 firms, all other
techniques – 10, except the Odom & Sharda’s Liear
Discriminant Analysis, which misclassifies 14.
Another group of experiments aimed to
determine the optimal network parameters. The
results show that regardless of the subset, the
optimal parameter values are: baseline vigilance
parameter ρ
test
=0; signal rule parameter α=0.01; and
learning fraction parameter β=1.0. The vigilance
parameter ρ (Rhobar), which determines the level of
details and granularity of the classes encoded into
the system, has different optimal value for different
subsets. The winning subset obtains best accuracy
with 0≤ρ≤0.4 and 0.5≤ρ≤0.575.
The experiments also showed that the network
training and testing time do not exceed 0.02 sec for
any variable subset and parameters’ values, which is
an indication that the model is efficient and responds
in a real time.
Table 1: Misclassified patterns by the ARTMAP-IC model
(€) and those from other models, all applied to the test
dataset.
# ARTMAP-
IC
Other
studies
# ARTMAP-
IC
Other
studies
1
29
2
30
3
31
4
32
5
33
6
34
7
35
* %
8 €
36
* %
9
37
10
38
11
39
*#%&@$
12
# @
40
*#%&@
13 €
41
14
42
15
43
16
44
17 €
*#%&@$
45
18 €
*#%&@$
46
*#%&@$
19
47
*
20 €
48
21 €
#%& $
49
*#%&@$
22
50
*# &@$
23
51
*
24 €
52
25 €
*#%&@$
53
26
54
*
#%&@$
27
55
*
28 €
* Misclassified by Odom and Sharda LDA – 14
# Misclassified by Odom and Sharda MLP – 10
% Misclassified by Rahimian et al MLP – 10
& Misclassified by Perceptron Model – 10
@ Misclassified by Athena Model – 10
$ Misclassified by Serrano MLP – 9
€ Misclassified by our ARTMAP-IC – 9
FORECASTING WITH ARTMAP-IC NEURAL NETWORKS - An Application Using Corporate Bankruptcy Data
171

5 CONCLUSIONS
This paper proposes a novel approach to the
bankruptcy prediction problem based on a
supervised ARTMAP-IC neural network. An
advantage of using that type of neural network over
the most popular MLPs is that it provides fast, one-
pass online learning, and it retains already acquired
knowledge while learning from novel patterns. In
contrast, the backpropagation MLP requires
numerous iterations, or epochs, to learn a new
pattern. This makes the ARTMAP-IC model
efficient and scalable for a continuously changing
input space, such as the bankruptcy prediction
domain.
Another advantage of the proposed model is the
high prediction accuracy. Compared with different
techniques over the same experimental data, the
model achieves the highest accuracy obtained by an
MLP, and outperforms all other techniques.
In conclusion, we find that ARTMAP-IC neural
network is suitable for application areas, such as the
financial diagnosis and bankruptcy prediction.
REFERENCES
Altman, E. (1968). Financial Ratios, Discriminant
Analysis, and the Prediction of Corporate Bankruptcy,
Journal of Finance 23(4), 598-609.
Atiya, A. (2001). Bankruptcy Prediction for Credit Risk
Using Neural Networks: A Survey and New Results.
IEEE Transactions of Neural Networks 12(4): 929-
935.
Balcaen, S., and Ooghe, H. (2004). 35 years of studies on
business failure: An overview of the classical
statistical methodologies and their related problems.
Working paper 248, Ghent University, Belgium.
Carpenter, G. A. and Markuzon, N. (1998). ARTMAP-IC
and Medical Diagnosis: Instance Counting and
Inconsistent Cases. Neural Networks, 11(2), 323-336.
Carpenter, G. A., Grossberg, S. and Reynolds, J. H.
(1991). ARTMAP: Supervised Real-Time Learning
and Classification of Nonstationary Data by a Self-
Organizing Neural Network. Neural Networks, 4.
Kumar, P. and Ravi, V. (2007). Bankruptcy Prediction in
Banks and Firms via Statistical and Intelligent
Techniques, European Journal of Operational
Research 180 (1): 1-28.
Odom, M., and Sharda, R. (1993). A Neural Network
Model for Bankruptcy Prediction, in: R.R. Trippi and
E. Turban, Eds., Neural Networks in Finance and
Investing, Probus Publishing Company, Chicago.
Rahimian E., Singh, S., Thammachacote, T., and Virmani,
R. (1993). Bankruptcy prediction by neural networks,
in Neural Networks in Finance and Investing, R.
Trippi and E. Turban, Eds. Chicago: Probus Publ.
Serrano-Cinca, C., (1996). Self organizing neural
networks for financial diagnosis. Decision Support
Systems 17: 227–238.
Wilson, R., and Sharda, R. (1994). Bankruptcy prediction
using neural networks. Decision Support Systems 11:
31–447.
Zhang, G., Hu, M., Patuwo, B., and Indro, D. (1999).
Artificial Neural Networks in Bankruptcy Prediction:
General Famework and Cross-validation Analysis,
European Journal of Operational Research 116, 16 -
32.
ICEIS 2008 - International Conference on Enterprise Information Systems
172
