
ROTATION INVARIANT FEATURE EXTRACTION FOR
WATERMARKING
M. Scagliola and P. Guccione
Dipartimento di Elettrotecnica ed Elettronica, Politecnico di Bari, Via E. Orabona 4, 70125 Bari, Italy
Keywords:
Watermarking, Radon Transform, Rotation Invariant.
Abstract:
Many watermarks for still images are robust against common signal processing techniques, mainly JPEG
compression, noise adding and low-pass filtering, while they are sensitive to geometrical manipulations, that
yield desynchronization errors.
In this paper robustness against some geometric transformations is achieved using a feature extraction method
based on the Radon transform and whose aim is to identify an unique (and robust) feature from the image
spectrum. The embedding, which exploits the extracted feature, is based on a multiplicative rule technique
and is applied on a suitable subset of the image Fourier transform. The properties of the extracted feature
allows to resynchronize the detector and the embedded watermark even if the image undergoes geometric
manipulations (in particular rotations) as well as other processings, so that the correct watermark retrieving is
guaranteed.
Experimental results, lead on many standard images, confirm the effectiveness of the feature extraction method
and the robustness of the watermark against both processing and geometric transformations.
1 INTRODUCTION
Digital watermarking is a technique to hide an infor-
mation, called the watermark, into a cover media. Wa-
termark techniques play an important role in the copy-
right protection of multimedia such as images, sounds
and video. In a blind watermarking context, the detec-
tor must be able to detect the mark on a received im-
age that has undergone a certain number of unknown
manipulations of an unknown entity, without owning
any information about the original image.
While many watermarking methods perform well
against the common signal processing techniques
(mainly filtering, noise adding and compression), they
lack robustness against geometric distortions, such as
rotation, scaling, translation, cropping/shearing, pro-
jective transformation, (Licks and Jordan, 2005). This
is justified by the different impact that these classes
of distortions have on the embedded watermark; in
fact, while the common signal processing techniques
reduce the watermark energy, geometric distortions
induce synchronization errors between the embedder
and the detector.
Geometric attacks can be both unintentional and
intentional; for example, an unintentional geometric
attack occurs when a marked image is printed and
scanned, as in the scanning process the image can be
slightly rotated with respect to the sampling grid. On
the other hand a geometric attacks can be performed
intentionally by an attacker with the aim of impair the
watermark detection, exploiting the weakness of the
watermarking system.
Therefore achieving robustness against geometric
transformations has become a widely studied topic in
digital image watermarking.
Several strategies have been proposed for water-
mark detection after geometric distortions. A rough
classification divides these schemes into template in-
sertion, invariant domain based schemes and feature-
based algorithms (Licks and Jordan, 2005). Tem-
plates are registration patterns which are inserted into
the image in addition to the watermark, allowing the
synchronization of the embedder and detector. This
solution may reduce the image fidelity and the wa-
termark capacity; moreover templates are susceptible
to removal or estimation attacks (Licks and Jordan,
2005). The Fourier-Mellin domain is often used in
watermarking since it is proved to be theoretically
invariant to rotation, scaling and translations (RST)
transformations. Thus, if the watermark is embed-
229
Scagliola M. and Guccione P. (2008).
ROTATION INVARIANT FEATURE EXTRACTION FOR WATERMARKING.
In Proceedings of the International Conference on Signal Processing and Multimedia Applications, pages 229-235
DOI: 10.5220/0001931502290235
Copyright
c
SciTePress

ded into the Fourier-Mellin transform of an image,
the robustness with respect to these geometrical trans-
formations is provided (
´
ORuanaidh and Pun, 1998),
(Lin et al., 2001). Actually, as stated in (Lin et al.,
2001), the Fourier-Mellin transform is considered an
expensive solution to cope with RST attacks and the
problem of inverting this map is a quite difficult task.
Feature-based algorithms are founded on the capabil-
ity to identify certain image features (edges, corners
and so on) before and after an attack. A huge vari-
ety of features have been used in several methods to
provide geometric robustness: for example Bas et al.
use a corner detector to construct a triangular tessel-
lation where the mark is embedded (Bas et al., 2000);
in (Simitopoulos et al., 2002) two one-dimensional
generalized Radon transforms are used; in (Xin et al.,
2004) an expansion of the image based on the Pseudo-
Zernike basis has been proposed with the properties
of RST invariance.
In this paper we present a watermarking technique
robust against rotation distortion and other common
signal processing, which is based on the capability
to extract a single invariant direction from the im-
age spectrum, used just to synchronize the detector
and the watermark. We start from the properties of
the Fourier-Mellin domain and from the well known
property of the 2D Fourier spectra, which states that
the Fourier transform (FT) of a rotated image is the
rotated version of the FT applied on the not-rotated
image. The idea is to properly define an insertion re-
gion in the Cartesian double transformed Fourier do-
main able to achieve rotation invariance avoiding the
need of a log-polar mapping, unlike in (
´
ORuanaidh
and Pun, 1998) and (Lin et al., 2001). Our approach
differs from other methods that embed the mark into
the Fourier domain since a single robust feature, ex-
tracted in this domain, is used to set up the rotation
invariant insertion region. Therefore, starting from
the detected invariant direction, the watermark is em-
bedded in a ring region covering the middle frequen-
cies in the Fourier domain using the rule described in
(Barni et al., 1998).
In the following we present a detailed description
of this method and experimental results that evidence
the effectiveness of the direction extraction and the
watermark retrieval under several distortions.
2 INVARIANT DIRECTION
The key idea is to characterize the invariant direction
as the straight line, passing for ( f
x
= 0, f
y
= 0), along
which the function |I( f
x
, f
y
)| has its maximum cumu-
lated value, where I( f
x
, f
y
) is the Fourier transform of
an image i(x,y). (Heretoafter it is intended that the
”zero” frequency location is ( f
x
= 0, f
y
= 0)). Hence
the invariant direction is uniquely identified by the an-
gle θ
inv
formed by the extracted line with a reference
direction. From the previous definition it can be in-
ferred that the Radon transform (Toft, 1996) is the
fundamental tool for the extraction of the invariant
feature.
The placement of the invariant direction in the
Fourier domain is motivated by two reasons. Since
the embedding is performed in the Fourier domain,
it is a rationale to extract a synchronization feature
in the same domain. Moreover, a watermarked im-
age can undergo attacks modifying either the whole
image or circumscribed part of it, hence the Fourier
domain has the advantage that local modifications in
the spatial domain are always spreaded.
The invariant direction is used as resynchroniza-
tion feature, which enables the watermarking system
to identify the same direction from every distorted
I
′
( f
x
, f
y
); in this way, whether the image has been ro-
tated by an angle α, the invariant direction (θ
inv
+ α)
is extracted, so that the detector and the message will
always be synchronized.
Actually the problem is that the extraction of the
invariant direction is performed both at the embed-
ding and detection sides; between the two operations
the cover image could have been modified by channel
distortions (which includes intentional distortions). In
order to make the extraction method as robust as pos-
sible, a pre-processing step is then applied to the im-
age to get a spectrum (and so, at least partially, an im-
age) which is as less dependent as possible on these
modifications.
2.1 Image Pre-processing
The pre-processing is performed to get a spectrum
which is less dependent on the modifications that the
image can undergo; its effect is then to provide ro-
bustness to the direction extraction method.
To get an image representation invariant to chan-
nel modifications, the edge feature is pointed out,
since edges generally survive (even if distorted) to
several distortions and processings. In Fig. 1 the pre-
processing chain scheme is fully depicted.
The tool used for the edge extraction is the cas-
cade of a Gaussian low-pass filtering and a morpho-
logical gradient, i.e. a morphological operator reveal-
ing sharp luminance transitions. This cascade is quite
similar to a Laplacian of a Gaussian filtering, usually
adopted for edge extraction, being the Laplacian op-
erator here substituted by the morphological gradient
operator (Lee et al., 1987). However differences be-
SIGMAP 2008 - International Conference on Signal Processing and Multimedia Applications
230
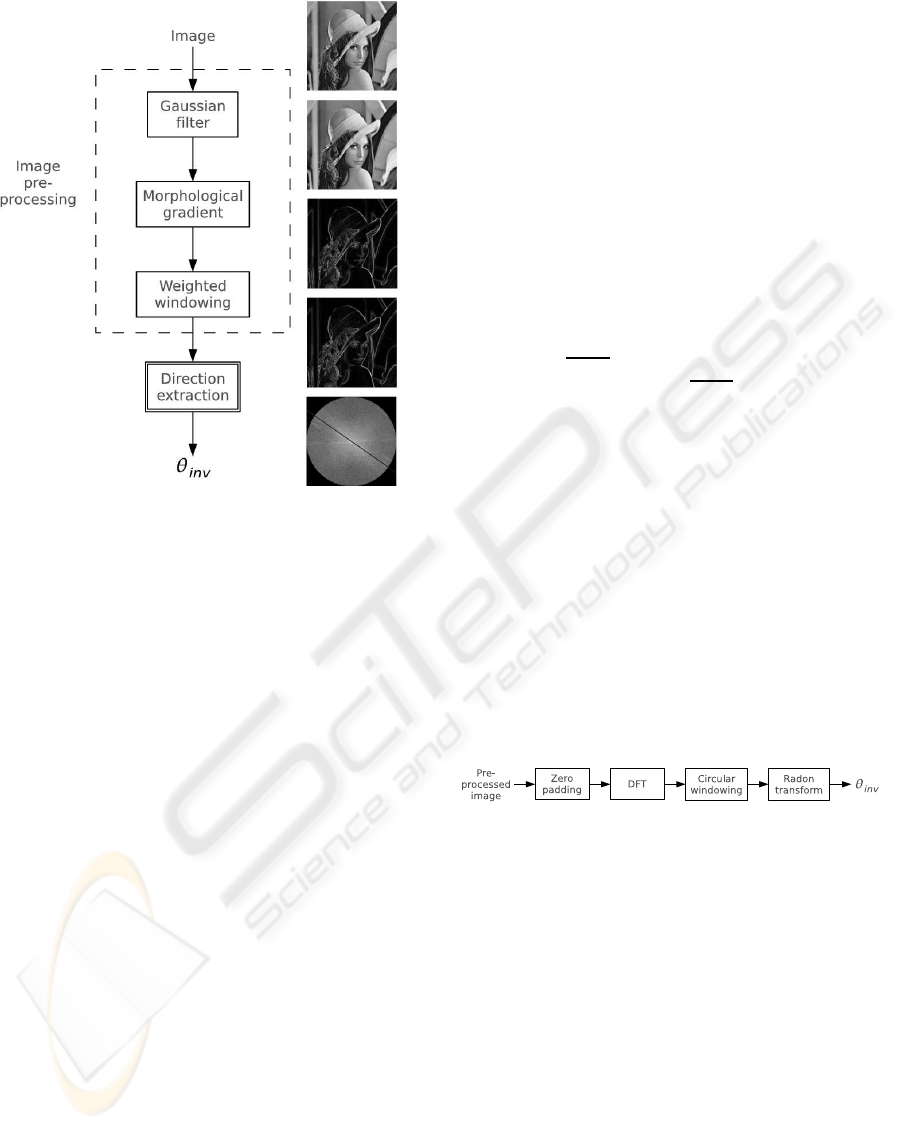
Figure 1: Block diagram of the pre-processing.
tween the twos exist. Laplacian operator associates
zero-crossing of second derivatives to an edge, whose
location is as close as possible to the real edge (Gon-
zalez and Woods, 2002), and it is typically followed
by a thresholding to convert a gray-scale image into a
binary edge image. By the way in this application we
are not interested in an accurate location of edges with
a binary image but rather in an invariant (and possibly
robust against noise) feature extraction through edge
enhancement; moreover we are interested to produce
edges with thickness as invariant as possible to modi-
fications on image. For this purpose a Gaussian low-
pass filtering together with a suitable morphological
gradient operator, able to enhance and to widen the
edges, can fit as well.
Referring to Fig. 1, the image is firstly low-pass
filtered by a Gaussian filter, in order to reduce the
higher frequencies energy, which in detection could
be due to noise added by the channel; then the mor-
phological gradient of the image is computed. The
chosen morphological structuring element has size 5
and has a symmetry as close as possible to a circular
one.
The effects on the image spectrum of the mor-
phological operations are not straightforward because
of their non-linear nature. An intuitive explanation
is that edge sharpening yields an increase of both
low frequencies and frequency terms related to edges,
hence the global effect is comparable to a contrast en-
hancement on image spectrum, which is a modifica-
tion useful for the direction extraction method.
The circular symmetric windowing is performed
on the enhanced edge image to reduce aliasing effects
in the discrete Fourier domain. In fact the FT and
the rotation are operations that do not exactly com-
mute in a discrete domain (Stone, H.S. and Tao, B.
and McGuire, M., 1998), so we do not expect a per-
fect identity between the rotated version of the DFT of
the image and the DFT computed from the the rotated
image. These differences are due to the skew between
the directions along which aliasing takes place and
the directions of FT axes. The aliasing effects can be
just reduced smoothing the boundaries with a circular
and symmetric window (Stone, H.S. and Tao, B. and
McGuire, M., 1998). The adopted windowing func-
tion has unit value within the circumference of radius
r
1
= (k
1
/2)
√
N ·M and is zero outside the circumfer-
ence of radius r
0
= (k
0
/2)
√
N ·M, with a raised co-
sine connection in the middle region; N and M are the
image dimensions.
In our application, we have chosen empirically the
parameters values k
0
= (4/5) and k
1
= (1/5) process-
ing a standard image database.
2.2 Invariant Direction Extraction
Method
In the diagram depicted in Fig. 2 the processing chain
constituting the invariant direction extraction method
is shown. These operations are performed on the
pre-processed image as obtained from the processing
chain presented in subsection 2.1.
Figure 2: Block diagram of the direction extraction method.
The image is firstly checked to have the same di-
mensions; if N 6= M, the shortest dimension is padded
with zeroes to obtain a square matrix before the com-
puting of the DFT.
Invariant direction extraction is performed using
the Radon transform on the transformed image. The
Radon transform is thus computed over directions
passing through the zero frequency:
R(0,ϕ)[ f(x,y)] =
=
Z
∞
−∞
Z
∞
−∞
f(x,y)δ(y−x tan(ϕ)) dxdy (1)
Actually a Discrete Radon transform is computed
on the image DFT, using a simple sum approxima-
tion. The Radon transform on a finite rectangular do-
main does not consider that, on different lines, dif-
ROTATION INVARIANT FEATURE EXTRACTION FOR WATERMARKING
231

ferent amounts of pixels lie and consequently diag-
onals are privileged directions, causing mistaken es-
timation. The circular windowing before the Dis-
crete Radon Transform can prevent this effect since
along every line a fixed amount of non-zero terms lies
(Jafari-Khouzani and Soltanian-Zadeh, 2005).
Computing of Radon transform in a discrete con-
text implies that a finite set of direction equally spaced
between [0,π[ must be chosen: ϕ
i
= i · ∆ϕ, i =
0,1,··· ,(⌊π/∆ϕ⌋−1).
Eq. (1) can be rearranged
R(0,i)[|I( f
x
, f
y
)|] =
= ∆f
x
N−1
∑
k=0
|I(k∆ f
x
,tan(ϕ
i
)k∆f
x
)| (2)
where ∆f
x
and ∆ϕ set the sampled lines along which
the cumulated value of Radon transform are com-
puted. Since the Cartesian grid of ( f
x
, f
y
), for which
the DFT values are available, will generally not coin-
cide with the grid (k∆f
x
,tan(ϕ
i
)k∆f
x
), a linear 2D in-
terpolation is used to compute the values of |I( f
x
, f
y
)|
in the needed positions.
After the computing of the discrete Radon trans-
form, the invariant direction angle θ
inv
will be equal
to the ϕ
i
for which
θ
inv
= max
ϕ
i
∈[0,π[
{R(0,i)[|I( f
x
, f
y
)|]} (3)
occurs.
3 EMBEDDING AND DETECTION
The embedding of the message is performed in the
Fourier domain using the embedding method de-
scribed in (Barni et al., 1998). The message is in-
serted into a sorted subset of the coefficients of the
doubly transformed domain, obtained as the intersec-
tion of a circular crown region with a finite subset of
straight lines belonging to a sheaf:
( f
x
, f
y
)t.c.
R
min
≤ ( f
x
2
+ f
y
2
) ≤ R
max
f
y
= tan(θ
inv
+ i·∆θ) · f
x
i = 0, ··· ,(⌊π/∆θ⌋−1)
(4)
where θ
inv
is the invariant direction extracted in (3).
Thus the detector and the embedder are synchronized,
since they consider the straight lines belonging to the
sheaf in an ordered sequence starting with the same
one, indexed by θ
inv
. From the previously defined
insertion region, an ordered sample sequence is ex-
tracted and the mark is inserted into this, according to
the chosen rule and according to the symmetry prop-
erties of the Fourier transform. For the embedding
too, a linear 2D interpolation is needed to get the val-
ues of the image in the locations belonging to the
above-defined sheaf.
According to (Barni et al., 1998), the message
W = {w
1
,··· ,w
L
} consists of a pseudo-random se-
quence, each value w
i
being a random real number
with normal distribution, zero mean and unitary vari-
ance. The multiplicative embedding rule is
t
′
i
= t
i
+ g w
i
|t
i
| (5)
where g is a gain factor modulating the embedding
strength.
Since the DFT of a real signal is complex val-
ued, the embedding of the same message will be per-
formed twice, both in real and imaginary parts of the
DFT samples, taking care to preserve the complex
conjugate symmetry of the spectrum.
The detector is built so that, given an image in in-
put, once the invariant direction has been extracted,
it can retrieve the marked sample sequence. Then the
detector verifies what message has been inserted com-
puting a correlation coefficient between the marked,
and possibly corrupted, sample sequence extracted
from the image and every codeword belonging to a
shared watermark codebook, known both at embed-
der and at detector sides. The correlation coefficient
will be used as measure of the mark presence at the
detector.
4 RESULTS
Herein some experimental results are shown, obtained
processing standard images, whose size is typically
512x512 pixels.
The effectiveness of the direction extraction
method is a needed condition for the decoder and
the mark to be synchronized. The following results
were obtained computing the Radon transform of the
windowed DFT of a pre-processed image along a fi-
nite set of directions equally spaced with a step ∆ϕ =
0.5 deg and choosing the direction with the maximum
cumulated value, as described in section 2.
In Figs. 3(a)–(d) the right working of the proposed
direction extraction method is exhibited. In Fig. 3(a)
the pre-processed Lena image is depicted while in
Fig. 3(b) its windowed spectrum is shown and the
extracted invariant direction is highlighted. Rotating
by an angle of 30 deg the Lena image, we had the
pre-processed image and the windowed spectrum de-
picted respectively in Figs. 3(c) and 3(d). Comparing
the highlighted directions in Figs. 3(b) and 3(d), the
SIGMAP 2008 - International Conference on Signal Processing and Multimedia Applications
232

rotation of the invariant direction according to the ro-
tation of the original image is noticeable.
(a) Pre-processed image (b) Invariant direction
(c) Pre-processed rotated
image
(d) Invariant direction
Figure 3: Example of pre-processing on Lena image with
extraction of invariant direction for both original and rotated
cases.
In order to measure the effectiveness of the direc-
tion extraction method, we compared the extracted in-
variant directions before and after the embedding and
attacks. We tested the algorithm against both com-
mon signal processing techniques (Additive White
Gaussian Noise, JPEG compression and smoothing)
and geometric distortions (rotation, scaling and crop-
ping). Cropping attack was performed cutting away
both symmetrically and asymmetrically the framing
part of the marked image, but preserving the image
center (where the most relevant information is sup-
posed to be located).
The experimental results are listed in Table 1,
where ∆θ
inv
= θ
′
inv
−(θ
inv
+ α)mod π is the difference
of extracted directions at the detection and embedding
sides. The angle values are expressed in deg, while
the results for cropping attacks are indexed by the per-
centage of pixels constituting the cropped image with
respect to the original one.
Besides, the direction extraction method performs
well against random line removal attack too (experi-
mental results here are not shown).
Afterwards some experiments were performed
to evaluate the effectiveness of the whole embed-
ding/detection scheme. We embedded a mark se-
Table 1: Invariant directions extracted from attacked im-
ages.
Image Lena Peppers Boat
Invariant direction 145 173.5 113.5
Attack ∆θ
inv
∆θ
inv
∆θ
inv
AWGN
σ = 10 -0.5 0 0
σ = 15 -0.5 0 0
σ = 20 0 0 0
JPEG
quality= 50 -0.5 0 0
quality= 30 0 0 0
quality= 20 0 0 0
quality= 10 0 0 0
Smoothing
Average 0 0 0
Gaussian 0 0 0
Median 0 0 0
Rotation
α = 1 0 0 0
α = 5 -0.5 -0.5 0
α = 45 -0.5 -1 -0.5
α = 60 -0.5 -0.5 -0.5
α = 90 -0.5 0 0.5
α = 120 -0.5 -0.5 0
α = 160 0 -0.5 -0.5
α = −1 0 0 0
α = −5 -0.5 -0.5 0
α = −45 -0.5 -1 -0.5
α = −60 -0.5 -0.5 0
α = −90 -0.5 0 0.5
α = −120 -0.5 -0.5 -0.5
α = −160 0 1 0
Scaling
scale= 0.5 1.5 0.5 0
scale= .75 1.5 0 0
scale= 1.5 0 0 0.5
scale= 2 0 0.5 0
Cropping
rem% = 85 1.5 0 0
rem% = 78 1.5 0 0
rem% = 65 -2.5 0 0
rem% = 53 -2.5 0 0
quence of length 9800 samples along 70 directions
into the DFT domain and the gain factor in the em-
bedding rule was fixed at the value g = 1.
In order to evaluate the imperceptibility of the wa-
termarking method, the adopted distortion metric is
the often used peak to signal noise ratio (PSNR). The
PSNR has been computed for the images in database
embedding 1000 different watermarks. For the pro-
cessed images we computed the average PSNR, that
resulted to be always greater than 40 dB and its stan-
dard deviation which was in the range .1 to .2 dB.
To check the robustness of the whole system,
some gray scale standard images were watermarked
and both signal processing and geometric attacks
were applied to these images. The detector output
reveals the estimated embedded message as the one
having the greatest correlation coefficient with the
sample sequence extracted from the marked and pos-
sibly corrupted image. Thus, from the detector re-
ROTATION INVARIANT FEATURE EXTRACTION FOR WATERMARKING
233

sponse to all the codewords belonging to the code-
book, we measured the first-to-second peak ratios
(P
1
/P
2
) in decibel.
In the experimental results, listed in Table 2, the
index ˜n represents the codeword retrieved from the
attacked image by comparison of the correlation co-
efficients. These results were obtained processing the
standard image Boat, but similar results have been ob-
tained with other standard images. Here the results for
the cropping attack are related only to symmetrical
cuts of the framing part of the marked image, since
for asymmetrical cropping the watermark retrieving
have shown to fail.
Table 2: Detection results on the attacked image Boat.
Embedded codeword index n = 259
Correlation detector
Attack ˜n P
1
/P
2
(dB)
AWGN
σ = 10 259 3.99
σ = 15 259 4.61
σ = 20 259 4.38
JPEG
QF= 50 259 3.64
QF= 30 259 3.38
QF= 20 259 2.61
Smoothing
Average 259 3.35
Gaussian 259 3.55
Median 259 3.15
Rotation
α = 1 259 3.73
α = 5 259 3.82
α = 45 259 3.69
α = 60 259 2.22
α = 90 259 3.69
α = 120 259 3.75
α = 160 259 1.98
α = −1 259 3.83
α = −5 259 3.56
α = −45 259 4.05
α = −60 259 4.66
α = −90 259 3.69
α = −120 259 4.18
α = −160 259 4.26
Scaling
scale= 0.5 Fail -
scale= .75 Fail -
scale= 1.5 Fail -
scale= 2 Fail -
Cropping
rem% = 85 259 4.50
rem% = 78 259 4.08
rem% = 65 259 3.35
rem% = 53 259 2.95
By inspection of the results listed in Table 2 it
is verified the robustness of the proposed scheme
against almost all the tested attacks. In particular the
correct mark retrieving is guaranteed even if a slight
error in extracted direction occurs. However the wa-
termark recovering fails if the marked image is scaled
up or down, though the invariant direction is correctly
retrieved (see Table 1). This is due to the inability
of the embedding/detection method to cope with the
transformed domain enlargement resulted from the
image scaling.
5 CONCLUSIONS
In this paper, a watermarking system has been pro-
posed that is robust against both processing and geo-
metric attacks, with particular reference to rotations.
A feature extraction method based on Radon trans-
form has been explained; this method is able to re-
trieve from image spectra a direction that is invariant
to geometric transformations on the image. This fea-
ture is used to synchronize the detector and the region
in the 2D DFT domain wherein the watermark is in-
serted, guaranteeing the watermark recovering.
Experimental results demonstrate the robustness
of both the invariant direction and the watermark em-
bedding against common processing and many of ge-
ometric attacks.
Achieving robustness against scaling attacks by an
improvement of the embedding method is even possi-
ble. Authors are still working in this direction, to-
gether with the testing of the robustness after com-
bined attacks.
REFERENCES
Barni, M., Bartolini, F., Cappellini, V., and Piva, A. (1998).
A dct-domain system for robust image watermarking.
Signal Process., 66(3):357–372.
Bas, P., Chassery, J.-M., and Macq, B. M. (2000). Robust
watermarking based on the warping of predefined tri-
angular patterns. In Proc. SPIE Vol. 3971, Security
and Watermarking of Multimedia Contents II, pages
99–109.
Gonzalez, R. C. and Woods, R. E. (2002). Digital image
processing. Prentice Hall.
Jafari-Khouzani, K. and Soltanian-Zadeh, H. (June 2005).
Rotation-invariant multiresolution texture analysis us-
ing radon and wavelet transforms. Image Processing,
IEEE Transactions on, 14(6):783–795.
Lee, J., Haralick, R., and L.G., S. (1987). Morphological
edge detector. Robotics and Automation, IEEE Trans-
actions on, 3(2):142–153.
Licks, V. and Jordan, R. (July-Sept. 2005). Geometric at-
tacks on image watermarking systems. Multimedia,
IEEE, 12(3):68–78.
Lin, C.-Y., Wu, M., Bloom, J., Cox, I., Miller, M., and Lui,
Y. (May 2001). Rotation, scale, and translation re-
silient watermarking for images. Image Processing,
IEEE Transactions on, 10(5):767–782.
SIGMAP 2008 - International Conference on Signal Processing and Multimedia Applications
234

´
ORuanaidh, J. J. and Pun, T. (1998). Rotation, scale and
translation invariant spread spectrum digital image
watermarking. Signal Process., 66(3):303–317.
Simitopoulos, D., Koutsonanos, D., and Strintzis, M.
(2002). Image watermarking resistant to geometric at-
tacks using generalized radon transformations. Digital
Signal Processing, 2002. DSP 2002. 2002 14th Inter-
national Conference on, 1:85–88 vol.1.
Stone, H.S. and Tao, B. and McGuire, M. (1998). Analy-
sis of image registration noise due to rotationally de-
pendent aliasing. Technical Report TR 98-018, Nec
Research Institute Tech. Rep.
Toft, P. (1996). The Radon Tranform - Theory and Imple-
mentation. PhD thesis, Department of Mathematical
Modelling, Technical University od Denmark.
Xin, Y., Liao, S., and Pawlak, M. (2-5 May 2004). Ge-
ometrically robust image watermarking via pseudo-
zernike moments. Electrical and Computer Engineer-
ing, 2004. Canadian Conference on, 2:939–942 Vol.2.
ROTATION INVARIANT FEATURE EXTRACTION FOR WATERMARKING
235
