
2D HAND GESTURE RECOGNITION METHODS FOR
INTERACTIVE BOARD GAME APPLICATIONS
A. C. Kalpakas, K. N. Stampoulis, N. A. Zikos and S. K. Zaharos
Department of Electrical and Computer Engineering, Aristotle University of Thessaloniki
54 124 Thessaloniki, Greece
Keywords: Human-computer Interaction, Board Games, Hand gestures, Gestures Recognition, Image processing,
Usability, Entertainment and games.
Abstract: The purpose of the current project is to demonstrate a complete interactive application capable of
recognizing 2D hand gestures in order to interact with computer-based board games without the use of a
special input devices, such as pointer, mouse or keyboard. A web camera is placed at the top of the platform
and captures in real-time player’s hand gestures and then recognizes the position of his fingertip on the
board. The user is able to choose a piece, select a destination spot and move a piece just by simply placing
and moving his/her index finger onto the board. Therefore an interactive, compact platform was developed,
containing a light-wood construction, a printed chess board and a conventional webcam in order to test the
effectiveness of the system. The suggested interactive system is fully compatible with the latest software
technologies, uses a custom GUI, real-time 2D hand gesture recognizer and earcons.
1 INTRODUCTION
Interactive application is the application or the
interface that allows people to communicate with
machines (Human-Machine Interaction). It is
generally acceptable that these kinds of applications
must be designed in such way so that they are user
friendly and support multiple accessibility options
for the disabled. This is the main condition that these
systems must fulfil in order to successfully
incorporate in productive processes or processes of
recreation so as to be widely accepted by the users
(Tzovaras 2001).
At this point we have to point out that we do not
refer to the widely known assumption "friendly to
the user of systems" but to an application of theory
and rules that implicates the interaction of human-
computer with the use of laborious processes for
analysis and planning of interactive systems. This
difficulty arises by the fact that a lot of cognitive
sciences are involved in the study of Human –
Machine Interaction, such as information
technology, psychology and cognitive psychology
,social psychology, ergonomy, linguistics,
philosophy, anthropology, industrial planning etc.
State-of-the-art systems include virtual hand gesture
interfaces using special devices (i.e. gloves,
stereoscopic glasses) (Technisches Museum Wien
2004, Zhang 2001) and speech recognition tools
which emulate keystrokes (FORTH-ICS 2004).
Several techniques and models were combined
to create a fully functional application, such as:
• Image recognition of the board and hand gesture
recognition without using special equipment such
as gloves, colored nails etc.
• Use of earcons in every critical action so as to
inform the user
• A construction which is usable, fits in any place,
is fully adjustable and compatible to different
hardware setup
The primary goal of the project is to develop an
interactive system which in conjunction with a
software interface can boost the HCI board-based
applications in a more natural interaction, enhance
the usability of computer-based board games,
suggest new interactive experiences and approaches
aiming primary at people with handicap (i.e. low
vision, hand-motor impaired) and secondary to
public kiosks and exhibitions (i.e. museums,
technology parks, schools).
325
C. Kalpakas A., N. Stampoulis K., A. Zikos N. and K. Zaharos S. (2008).
2D HAND GESTURE RECOGNITION METHODS FOR INTERACTIVE BOARD GAME APPLICATIONS.
In Proceedings of the International Conference on Signal Processing and Multimedia Applications, pages 325-331
DOI: 10.5220/0001939103250331
Copyright
c
SciTePress

2 MATERIALS AND METHODS
2.1 Board Recognition
The first step in designing the software, is to develop
an algorithm which will be able to recognize the
board. The recognition will be visual. One of the
most popular techniques for edge detection is based
on the Laplacian operator which is defined with the
second class partial derivative of the function f(x,y)
depending to x and y as it is shown below (R.
Gonzalez & R. Woods, 2002).
22
2
22
(, )
f
f
fxy
x
y
∂∂
∇=+
∂
∂
(1)
The first class derivative of the above function
gives local maximums and minimums at the edges
of the image (a grayscale copy of the captured image
is used) due to the big changes in brightness.
Consequently, equation (1) is equal to zero at the
edges of the processing image.
Figure 1: A chess board setup.
The above method is used in normal image
processing. Taking advantage of the fact that the
board has discrete edges and these edges are located
at places where color changes rapidly from white to
black and vice-versa, a much more flexible special-
points recognition method is used, not dealing with
second partial derivatives of the image edge
functions; thus reducing the calculations and
minimizing the execution time. The discrete
approach of the Laplacian operator is shown in
equation (2):
()()()()
2
1
( , ) ( , ) , 1 , 1 1, 1,
4
f
xy fxy fxy fxy fx y fx y∇−++−+++−⎡⎤
⎣⎦
(2)
A typical chess board was put to the test so as to
verify the precision of the algorithm (Figure 1). Let
us have the pixel A with coordinates (x,y), and f(x,y)
as the color content of the specific pixel as shown in
Figure 2. We also consider the neighbor pixels of
pixel A. The aggregated P is calculated as follows:
(
)
(
)
(
)
(
)
,1 ,1 1, 1,
P
fxy fxy fx y fx y=+−−++−−
⎡
⎤⎡ ⎤
⎣
⎦⎣ ⎦
(3)
Figure 2: Pixels used for calculating P.
If the pixel is inside a random square of the chess
board then, as it can be easily deduced, P equals to
zero. This happens because all the neighbor pixels
have the same value and the two parts of the
aggregation are equal to zero. If the chosen pixel
happens to be placed onto an edge then one of the
two parts of the aggregation differs from zero. The
result of applying the function on the image is
illustrated in Figure 3.
Figure 3: Recognizing the edges of the chess board.
Further more, it is easier to calculate the
intersection of the edges (crosses) that will define
the chess squares, as fewer calculations are needed.
The focus is on the white lines in order to locate the
desired pixels (crosses).
As shown in Figure 4, we are currently seeking
the A1 type pixels (center of the cross). The
distinctive difference between pixels A1 and A2 is
the surrounding color (black or white).
(1,)
f
xy+
(1,)
f
xy−
(1,)
f
xy
−
(, 1)
f
xy+
(, )
f
xy
SIGMAP 2008 - International Conference on Signal Processing and Multimedia Applications
326

A1
A2
Figure 4: Board marks detection.
In order to achieve the aforementioned, a 5x5
mask is applied to the recognized edges (board
marks). The parameters α and β of the mask may
vary and depend on the type of the board (squares,
circles, polygons etc.) :
101
0
00000
0
10 1
M
αα
α
ββα
α
ββα
αα
−
−
−
=
−−
−−
(4)
For example, for the chess board case the applied
mask has α=β=0,1. As M(x,y) we define the matrix
element (3,3) of matrix M. In order to investigate
whether a random pixel f(x,y) belongs to the cross or
not, we used the neighbor pixels. We define the
matrix below.
()()()()()
( )()()()( )
() () ()( )()
()()()()()
( )()()()( )
2,2 1,2 ,2 1,2 2,2
2,1 1,1 ,1 1,1 2,1
2, 1, , 1, 1 2,
2,1 1,1 ,1 1,1 2,1
2,2 1,2 ,2 1,2 2,2
fx y fx y fxy fx y fx y
fxyfxyfxyfxyfxy
f
fx y fx y fxy fx y fx y
fx y fx y fxy fx y fx y
fx y fx y fxy fx y fx y
−−−− −+−+−
−−−− −+−+−
=− − ++ +
−+−+ +++++
−+−+ +++++
(5)
From functions (4) and (5) we calculate the sum
which is described in function (6).
2
2
22
(, )* (, )
y
x
xy
p
Mxy fxy
=
=
=− =−
=
∑∑
(6)
Applying (6) to all image edges, all A1 pixels
(Figure 4) will return either a very large or a very
small integer. These results are shown in Figure 5.
Figure 5: Identifying the board marks after mask results.
If the mask is applied to a pixel of A2 type
(Figure 4) the result is close to zero due to the effect
of mask M. This method returns more pixels than
expected, since the mask outputs higher values for a
group of neighboring pixels due to noise effects of
the captured image (although 81 board markers were
expected initially the actual result was more than
500 board markers). In order to solve this, a
clustering process is performed using small
clustering radius (8-15 pixels) and then the centers
of the clusters are extracted (Figure 6). The
clustering radius depends mainly on the resolution
and noise effects of the imaging device (webcam).
Figure 6: Board marks recognition and numbering.
The aforementioned approach poses the
limitation that the angle between the horizontal and
the chess board has to be less than 45 degrees
(which is almost always the case due to the
construction of the base and the physical user
access). If for some reason the board has to be
rotated at 45 degrees in relation to the camera axis,
then mask M (4) has to be rotated accordingly. In
either case, the algorithm returns the correct
mapping of the board marks including the desired 81
pixels.
2D HAND GESTURE RECOGNITION METHODS FOR INTERACTIVE BOARD GAME APPLICATIONS
327
2.2 Gesture Recognition
After recognizing and mapping the board the next
step is to recognize the fingertip that defines the
moves. There are several approaches regarding this
task: image processing, use of an artificial
supplement such us a glove or a colored finger
shield. The approach used in this project for gesture
recognition is based on image processing techniques
in order to reduce the complexity of the system,
increase usability, avoid the use of extra equipment
and reduce the overall cost (Imagawa 1998).
When the hand enters the board it changes the
color context of the captured image. One important
aspect of the algorithm is that the form of the hand
should be as close as possible (but not necessarily
exactly the same) to the one shown at Figure 7. This
means closed grasp and extended index finger which
is very close to the natural, human hand-driven
selection pattern.
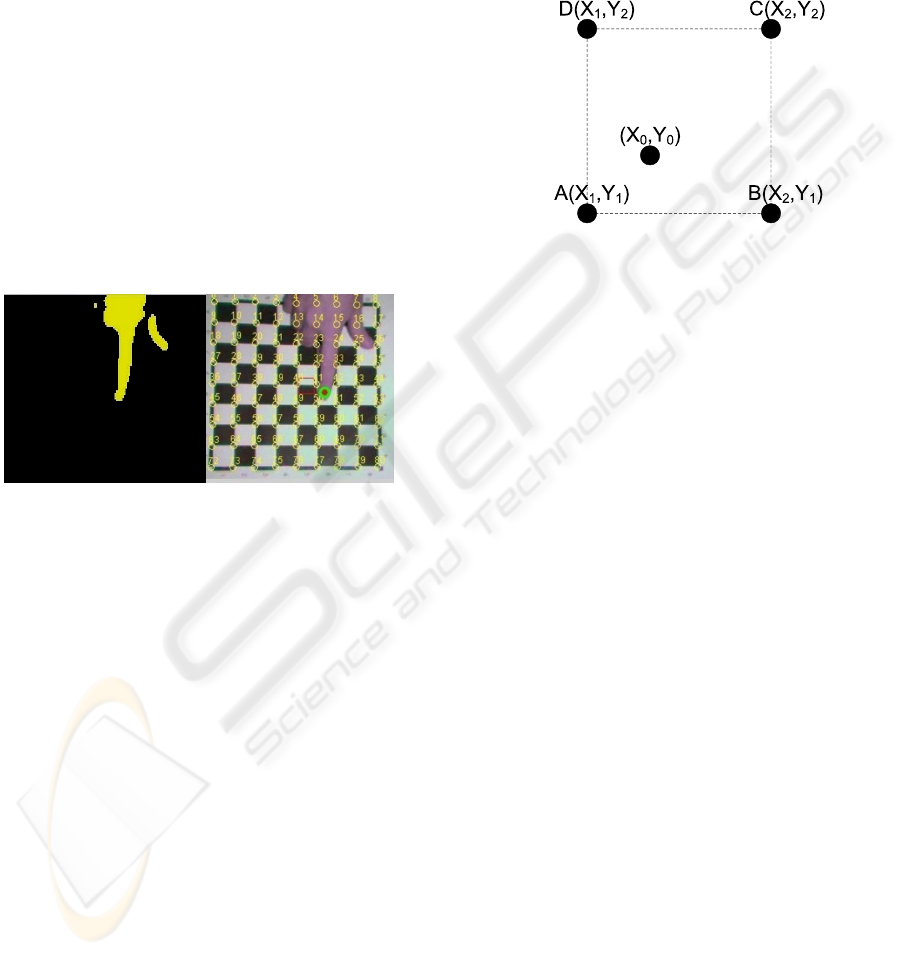
Figure 7: Successful gesture recognition.
The only requirement is that a definite pointing
outline must be present. The hand gesture must not
form an irregular shape, like multiple fingers
pointing at the same time etc. The algorithm scans
the captured image taken from the web-camera and
distinguishes the pixels that have a special color
information that range between a lower and an upper
color bound (thresholds). These two thresholds are
pre-stored through an actual hand color sampling
(two independent frame grabs by the web-camera
during the initialization of the application and they
represent the variations of skin color). A low pass
filter is applied in order to remove the noise. The
points retrieved by the algorithm do not represent
the whole hand but they are enough for the
recognition of the tip of the finger.
In Figure 7 we notice that the algorithm
successfully identifies a chess board along with the
fingertip that enters the camera’s view field. We can
also see both the board marks (numbered circles)
and the fingertip (colored circle) recognized by the
algorithm.
2.3 Hot Spots Recognition
After we have recognized the position of the
fingertip each one of the recognized board marks is
given a specific numbering. The numbering is
associated with a set of coordinates (x,y) for each
board mark.
Figure 8: Example of a chess hot spot.
Generally, the hot spots identification is based on
the shape of the board pattern (i.e. diamonds, oval,
circle, polygons). Assuming the ABCD square in our
chess board example (Figure 8) and a fingertip at
point (X
0
,Y
0
), the following conditions must apply at
the same time:
• Χ
2
>Χ
0
>Χ
1
• Υ
2
>Υ
0
>Υ
1
The algorithm compares the coordinates (X
0
,Y
0
)
to the coordinates of every square of the board. As
the aforementioned conditions are satisfied, the
active square (that is the one in which the fingertip
rests for 2 seconds) is selected.
3 IMPLEMENTATION
A complete, versatile and fully functional board
game system with embedded optical recognition
capabilities was implemented aiming at the testing
of the precision and overall efficiency of the
methods analyzed above. A typical chess board was
selected for the trials. The implementation plan
includes both software and hardware development.
3.1 Software Implementation
The applications built to support the board
recognition, hand gesture recognition and graphical
SIGMAP 2008 - International Conference on Signal Processing and Multimedia Applications
328

user interfaces were based on object oriented
programming using Java so as to achieve full
compatibility with all hardware and software
platforms.
The chess game engine was based on a
customized version of “JChessBoard”, a java based
chess game under the GNU General Public License
(GPL) armoured with the necessary additions and
improvements, so as to fully co-operate with the
image processing algorithms and special application
needs (such as audio and visual notification
messages).
The development plan used the spiral model of
software evolution. Thus, a prototype of the platform
was developed, trials were carried out and usability
assessments in a numerous aspects were completed.
Based on users remarks the software as well as the
rest of the construction were upgraded, so as to
become more user friendly and more efficient short
after several development cycles.
3.2 Hardware Implementation
In order to achieve the aforementioned goals, a light
construction was made as the base which hosted the
chess board. A satisfactory solution was to put a
camera on the top of the chess board. The specified
image resolution has been chosen so that the
algorithm would perform the lowest possible
number of calculations; thus boosting the execution
speed. A low-end, off-the-shelf web camera was
used for this purpose. The base of the application
was made of plain chipboard and included
illumination placeholders and a laptop opening
(accepts almost every type of laptop up to 17 inch
monitor). The drawing layout of the hardware
platform is shown in Figure 9.
In more detail, a web camera (horizontally and
vertically adjustable) was installed in order to
capture the user’s fingertip as it moves on the chess
board. The image is captured in a resolution of
Figure 9: Drawing of the base (final prototype).
320x240 pixels capable of accurately recognizing
details but not high enough so as to avoid excessive
processing load. The typical chess board was printed
in black and white on a A3 paper (29,7x42 cm)
firmly placed on top of the construction base. The
chess board is slightly modified with the addition of
peripheral edges. This ensures the efficient
recognition of the peripheral squares. The typical
chess board setup used is shown in Figure 1.
For better performance, the boards can be
painted on the chipboard so that displacement
problems are vanished. At the lower part of the
construction one can see the opening (pocket) were
the laptop is placed. On the upper part of the
construction, an adjustable (lengthwise and in
height) telescopic arm has been placed, in order to
host the web camera and adjust it to the proper
position. Another issue was the illumination of the
chess board. Two energy-efficient fluorescent lights
were placed at opposite sides (as shown in Figure
10) in order to have proper lighting in less
illuminated environments as well as to eliminate
shadowing effects caused by the moving hand.
Figure 10: A view of the actual implemented system.
3.3 Commands and Actions
After having finished with the software and
hardware implementation, an interaction scheme is
designed considering the specific requirements and
specifications posed by the type of the board game
including a complete command list, interrupts and
external actions. For example, in our implemented
system one is ready to play chess using the
interactive chess board (Figure 10) using only his
hand and no other input device such as mouse or
keyboard. The hand gesture commands that apply
during this game are as follows:
1. The player positions his/ her index
fingertip to the desired square where the chosen-to-
move chess piece resides.
2D HAND GESTURE RECOGNITION METHODS FOR INTERACTIVE BOARD GAME APPLICATIONS
329

2. Leaving the fingertip at this position for 2
seconds is the sign for the system to recognize the
chosen piece (followed by an earcon / text message
confirmation).
3. Afterwards the player’s fingertip has to
move to the desired destination square.
4. Resting the fingertip at this destination
square for another 2 seconds is enough for the
system to recognize the destination square. If the
movement is allowed, an earcon confirmation is
reproduced and the game continues. Otherwise, the
chosen chess piece returns to the originating square
and the system returns to step 1 for the same player,
again followed by a failure-like earcon.
4 USABILITY ISSUES
Assessing usability is a complex and
multidimensional procedure due to the fact that
different type of assessments have to carried out at
several implementation stages. Different types of
assessment include: usage of mathematical models
without human participation, experimental methods
using human participation as well as inquiring
methods in conjunction with interviews and
questionnaires.
The suggested HCI system had to prove its
efficiency so an actual usability evaluation was
performed on the implemented chess application.
Experimental methods with human participation
were the chosen including: observing the players and
recording their moves, execution times, number of
errors, facial expressions etc. and giving merit
ratings, questionnaires, interviews. There were
several usability indicators examined: required time
for a successful interaction with the system,
minimum time for the execution of a command or
action, successful actions to failures ratio etc. The
goal is to investigate the user degree of satisfaction,
the ease of use, common bugs etc. A series of
custom-made questionnaires have been developed
and they were given to 16 volunteers (two of them
had a hand/grip handicap) of various ages (between
20 to 40 years old) and various educational levels
(high school graduates, university graduates, Phd
holders) with low, medium and high computer
and/or gaming skills (Lewis, 1995).
Figure 11: Users interact with the system and developers
record their responses to certain tasks during the
evaluation procedure.
After a cycle of evaluation and additions –
changes to the original plan, the first prototype was
redesigned and a final prototype was developed. The
evaluation of the prototype by the representative
sample of targeted users (Figure 11) lasted about
two weeks, during which quantitative data (timings,
error measuring etc) as well as qualitative data
(general mood and satisfaction, facial expressions,
body language, emotions etc) had been recorded and
analyzed. An illustrative part of the analysis of the
qualitative data is shown in Figure 12. The
evaluators rewarded the system with a total average
of 3,91 out of 5 in terms of user-friendly
environment, general feeling, ease of use, well-
organized information on screen, recovery time upon
failure, quality of multimedia, help on demand and
variety of features.
Qualitative Analysis
5
4
4
3
4
3
4
5
3
4
4
3,91
0,00 1,00 2,00 3,00 4,00 5,00
Total Average
Easy to use
Feeling comfortable
Explains how to solve a problem
Quickly recovers after failure
Responds instantly
Information Retrieval
Information is well organized
Interaction is pleasant
Has all the features I expected
User manual is helpful
Quality of multimedia
Figure 12: Overall score of the evaluation.
SIGMAP 2008 - International Conference on Signal Processing and Multimedia Applications
330

5 CONCLUSIONS
Human – Machine Interaction is a very sophisticated
as well as demanding field. According to our
opinion, it is the field that will play a dominant role
in the near future. Innovative technical ideas are not
sufficient if they are not accompanied with user
friendliness and user satisfaction in general.
The implemented recognition technique was proven
quite successful with only minor bugs and
restrictions (i.e. the angle of the hand). This was
proven by both experts and non-experts quantitative
and qualitative usability evaluation reports. It was to
our surprise the wide acceptance of the implemented
project ( 3.97 / 5 ) not only by people who had never
played chess before or people who were not open to
computer games in general but also by people with
special handicap in arms and hands. Mean time for a
successful interaction was less than 1 minute.
Successful interactions to failures ratio was
acceptably high (9:1). The use of conventional
materials and off-the-shelf hardware kept the total
cost very low; thus affordable to almost anyone.
The suggested recognition approach, which is the
most user friendly one, is not to use any supplements
but to take advantage of the different color context
of the hand compared to the board. The use of
alternative recognition methods such as gloves and
colored nails have certain disadvantages. Despite the
fact that the recognition algorithm can be less
complex, the user doesn’t have to use any extra
equipment (such as gloves or other special
equipment) in order to play the game. Also, the
production cost of the system is minimized. The
users that evaluated both suggested solutions in early
development stage strongly recommended the
second approach.
Future development of the project, which
actually turns to be a very challenging goal, is to use
actual pieces and play board games in real-time with
the computer as our live opponent. This requires
advanced image processing algorithms for decoding
the position of the pieces as well miniature robotic
arm (with 6 degrees of freedom) utilizing kinematics
models for moving the opponents pieces.
REFERENCES
Avouris N., 2000, Introduction to Human-Computer
Interaction. Athens: Diavlos.
FORTH-ICS 2004, UA Chess. Retrieved March 3, 2008,
from http://www.ics.forth.gr/uachess/
Gonzalez R. & Woods R., 2002, Digital Image
Processing. 3
rd
edition. USA: Prentice Hall.
Imagawa, K., Lu, S., Igi, S.: Color-Based Hand Tracking
System for Sign Language Recognition, IEEE Int.
Conf. on Automatic Face and Gesture Recognition,
Japan. (1998)
JChessBoard, 2002, Retrieved June 21, 2007, from http://
jchessboard.sourceforge.net/
Lewis, J. R., 1995, IBM Computer Usability Satisfaction
Questionnaires: Psychometric Evaluation and
Instructions for Use. International Journal of Human-
Computer Interaction, p.7:1, 57-78. (Online).
Available at: http://www.hcirn.com/ref/refl/lewj95.php
(accessed 12 April 2008).
Papamarkos N., 2005, Digital Image Processing &
Analysis. Athens: V. Giourdas.
Tzovaras, Dimitrios, 2001, University Notes on Human-
Machine Interaction.(ebook).Thessaloniki. Available
at: http://alexander.ee.auth.gr:8083/eMASTER/cms.
downloadCategory.data.do?method=jsplist&PRMID=
4 (accessed 12 April 2008)
Technisches Museum Wien, 2004. “The Virtual Turkish
Chess Player”, Retrieved January 21, 2006, from
http://www.ims.tuwien.ac.at/~flo/ vs/chessplayer.html
Zhang, Z., et al. Visual Panel: Virtual Mouse, Keyboard,
and 3D Controller with an Ordinary Piece of Paper. in
Proc. ACM Perceptual/Perceptive User Interfaces
Workshop (PUI'01),. 2001. Florida, USA.
2D HAND GESTURE RECOGNITION METHODS FOR INTERACTIVE BOARD GAME APPLICATIONS
331
