
MODIFICATIONS AND IMPROVEMENTS ON IRIS RECOGNITION
Artur Ferreira
1,2
, Andr´e Lourenc¸o
1,2
, B´arbara Pinto
1
and Jorge Tendeiro
1
1
Instituto Superior de Engenharia de Lisboa, Lisboa, Portugal
2
Instituto de Telecomunicac¸˜oes, Lisboa, Portugal
Keywords:
Iris Recognition, Biometrics, Image Processing, Image Segmentation.
Abstract:
Iris recognition is a well-known biometric technique. John Daugman has proposed a method for iris recogni-
tion, which is divided into four steps: segmentation, normalization, feature extraction and matching. In this
paper, we evaluate, modify and extend John Daugman’s method. We study the images of CASIA and UBIRIS
databases to establish some modifications and extensions on Daugman’s algorithm. The major modification is
on the computationally demanding segmentation stage, for which we propose a template matching approach.
The extensions on the algorithm address the important issue of pre-processing, that depends on the image
database, being especially important when we have a non infra-red red camera (e.g. a WebCam). For this
typical scenario, we propose several methods for reflexion removal and pupil enhancement and isolation. The
tests, carried out by our C# application on grayscale CASIA and UBIRIS images, show that our template
matching based segmentation method is accurate and faster than the one proposed by Daugman. Our fast
pre-processing algorithms efficiently remove reflections on images taken by non infra-red cameras.
1 INTRODUCTION
Human authentication is of central importance in
modern days (Maltoni et al., 2005)(Jain et al., 2004).
Instead of passwords, or magnetic cards, biometric
authenticationis based onphysical or behavioralchar-
acteristics of humans. From the set of biological char-
acteristics, such as face, fingerprint, iris, hand geom-
etry, ear, signature, and voice, iris recognition is con-
sidered extremely accurate and fast. From its charac-
teristics the fact that it is considered unique to an in-
dividual, its epigenetic pattern remains stable through
life, and the pattern variability is enormous among
different persons make iris very attractive for use as
biometric for authentication and identification.
The problem of iris recognition attracted a lot
of attention in the literature: John Daugman (Daug-
man, 1993), Boles (Boles, 1997), and Wildes (Wildes,
1997) were the precursors of the area. Several mod-
ifications on work of Daugman have been proposed
in the last decade: (Yao et al., 2006) uses different
filters;(Greco et al., 2004) applies Hidden Markov
Models to choose a set of local frequencies;(Joung
et al., 2005) modifies the normalization stage; (Ar-
vacheh, 2006) changes segmentation and normaliza-
tion; (J.Huang et al., 2004) modifies segmentation.
In this paper we follow John Daugman approach
(Daugman, 1993) introducing several variations on
the segmentation step based on templates and fo-
cusing the tuning of the algorithm for the UBIRIS
database (Proenc¸a and Alexandre, 2005)(Proenc¸a,
2007)
1
. We also propose pre-processing techniques
for reflexion removal,and pupil enhancement and iso-
lation. The proposed algorithms are also evaluated on
the CASIA (Chinese Academy of Sciences Institute
of Automation) database
2
.
The paper is organized as follows. Section 2
presents the steps of an iris recognition algorithm
and details Daugman’s approach. Section 3 describes
the standard test images from CASIA and UBIRIS
databases. Modifications to Daugman’s method and
new approaches for pre-processing are proposed in
Section 4, along with a study of CASIA and UBIRIS
images. Discussion of experimental results and con-
clusions are drawn in Sections 5 and 6, respectively.
2 IRIS RECOGNITION
The process of iris recognition is usually divided into
four steps
1
iris.di.ubi.pt/index.html
2
www.sinobiometrics.com
72
Ferreira A., Lourenço A., Pinto B. and Tendeiro J. (2009).
MODIFICATIONS AND IMPROVEMENTS ON IRIS RECOGNITION.
In Proceedings of the International Conference on Bio-inspired Systems and Signal Processing, pages 72-79
DOI: 10.5220/0001536100720079
Copyright
c
SciTePress

(Vatsa et al., 2004):
• segmentation - localization of iris region in a eye
image, that is the inner and outer boundaries of
the iris (see figure 1); can be preceeded by a pre-
processing stage to enhance image quality;
• normalization - create a dimensionality consistent
representation of the iris region (see figure 2);
• feature extraction - extracting informationthat can
be used to distinguished different subjects, creat-
ing a template that represents the most discrimi-
nant features of the iris; typically it uses texture
information;
• matching - the feature vectors are compared using
a similarity measure.
2.1 Daugman’s Approach
Consider an intensity image I(x,y), where x and y de-
note respectively the rows and columns of an image.
The problem is to automatically find the iris and ex-
tract its characteristics.
The segmentation step of (Daugman, 1993), local-
izes the inner and outer boundaries of the iris with the
integro-differential operator
max
r, x
0
, y
0
G
σ
(r) ∗
∂
∂r
I
r,x
0
,y
0
I(x,y)
2πr
∂s
, (1)
in which r represents the radius, x
0
,y
0
the central
pixel and G
σ
(r) a gaussian filter used to soften the im-
age (with σ standard deviation). The operator formu-
lates the problem as the search for the circle (center:
x
0
,y
0
and radius) where occurs a maximum change in
pixel values between adjacent circles. Fixing differ-
ent centers, first derivatives are computed varying the
radius; its maximum corresponds to a boundary.
Figure 1 shows an eye image with red and yellow
circles representing the iris and pupil boundaries, re-
spectively. On the right is illustrated the segmented
iris; note the presence of the upper eyelids.
Figure 1: Segmentation Step: a) radius of the iris b) radius
of the pupil c) center d) segmented iris.
The normalization step transforms the iris region
into a normalized image, with fixed size, allowing
comparisons of different iris sizes. Iris may have dif-
ferent sizes due to pupil dilation caused by varying
levels of illumination. The rubber sheet model (Daug-
man, 1993), remaps each point (x,y) of the iris image,
into an image I(r,θ) where r ∈ [0, 1] and θ ∈] − π,π],
according to
I(x(r,θ),y(r,θ)) → I(r,θ). (2)
The transformation from cartesian to normalized
polar coordinates, uses the mapping
x(r,θ) = (1− r)x
pupil
(θ) + rx
iris
(θ)
y(r,θ) = (1− r)y
pupil
(θ) + ry
iris
(θ),
(3)
where (r,θ) are the corresponding normalized co-
ordinates, and x
pupil
,y
pupil
and x
iris
,y
iris
the coordi-
nates of the pupil and iris boundary along θ angle.
Figure 2 presents an example of the produced normal-
ized representation; it is possible to observe in the left
image that the center of the pupil can be displaced
with respect with the center of the iris. The right im-
age represents the normalized image: on the x-axis
are represented the angles (θ), and on the y-axis the
radius (r). Observe that the upper eyelids are depicted
on the lower right corner.
Figure 3 shoes the segmentation and normaliza-
tion steps for the 3 considered databases.
To encode the iris pattern, 2D Gabor filters are em-
ployed
G(r,θ) = e
−iω
0
(θ
0
−θ)
e
−
(r
0
−r)
α
2
· e
−
(θ
0
−θ)
2
β
2
. (4)
These filters are considered very suitable to en-
code texture information and are characterized by
three parameters: spacial localization x
0
,y
0
, spacial
frequency w
0
and orientation θ
0
, and gaussian param-
eters (α,β). Figure 4 presents the individual compo-
nents of the filter.
The application of this filter on the image gener-
ates a complex image representing the relevance of
Figure 2: Normalization Step: Daugman’s rubber sheet
model.
MODIFICATIONS AND IMPROVEMENTS ON IRIS RECOGNITION
73

the texture for a given frequency and orientation. Sev-
eral filters are applied in order to analyze different tex-
ture information. This set of filters is defined by
GI =
Z
ρ
Z
φ
e
−iω(θ
0
−φ)
e
−
(r
0
−ρ)
α
2
−
(θ
0
−φ)
2
β
2
I(ρ,φ)ρdρdθ
(5)
Figure (5) shows the Gabor filters considered for
this purpose.
The output of the filters is quantized using the real
and imaginary part, Re(GI) and Im(GI), respectively
by
h
Re
=
1, if Re(GI) ≥ 0
0, if Re(GI) < 0,
h
Im
=
1, if Im(GI) ≥ 0
0, if Im(GI) < 0.
(6)
These four levels are quantized using two bits.
The so called “IrisCode” has 2048 bits (256 bytes),
computed for each template, corresponding to the
quantization of the output of the filters for different
orientations and frequencies (1024 combinations).
The matching step (Daugman, 2004), computes
the differences between two iriscodes (codeA and
codeB) using the Hamming Distance (HD)
HD =
k(codeA⊗ codeB) ∩ maskA∩ maskBk
kmaskA ∩ maskk
(7)
where ⊗ denotes the XOR operator, while the
AND operator ∩ selects only the bits that have not
been corrupted by eyelashes, eyelids, specular reflec-
tions, etc, and (kk) represents the norm of the vectors.
To take into account possible rotations between two
iris images, Daugman compares the obtained HD with
Figure 3: Segmentation and normalization steps: a)
CASIAv1 b) CASIAv3 c) UBIRISv1.
Figure 4: Feature Extraction with 2D Gabor filters: a) gaus-
sian; b) 2D sinusoid; c) the resulting filter.
Figure 5: Gabor filters with eight orientations for texture
extraction.
the one obtained using a cyclic scrolling versions of
one of the images. The minimum HD gives the final
matching result.
3 IMAGE DATABASES
This section describes the main features of the test
images of CASIA and UBIRIS databases.
3.1 CASIA
The well-known CASIA-Chinese Academy of Sci-
ences Institute of Automation database from Beijing,
China
3
has two versions:
• CASIAv1 - 756 images of 108 individuals;
• CASIAv3 - 22051 images of over 700 individuals.
On CASIAv3, the images are divided into the follow-
ing categories:
• interval - digitaly manipulated such that the pupil
was replaced by a circular shape with uniform in-
tensity, eliminating undesired illumination effects
3
http://www.sinobiometrics.com
BIOSIGNALS 2009 - International Conference on Bio-inspired Systems and Signal Processing
74

and artifacts such as reflection; CASIAv1 is a sub-
set of this category;
• lamp - images acquired under different illumi-
nation conditions, in order to produce intra-class
modifications (images of a given eye taken in dif-
ferent sessions);
• twins - images of 100 pairs of twins.
These 320 × 280, 8 bit/pixel images were acquired
with an IR camera; we have used their grayscale ver-
sions.
3.2 UBIRIS
The UBIRIS database (Proenc¸a and Alexandre,
2005)
4
, was developed by the Soft Computing and
Image Analysis Group of Universidade da Beira Inte-
rior, Covilh˜a, Portugal. This database was created to
provide a set of test images with some typical pertur-
bations such as blurred images, with reflex and eyes
almost shut, being a good benchmark for systems that
minimize the requirement of user cooperation. The
images are captured at-a-distance and minimizing the
required degree of cooperation from the users, proba-
bly even in the covert mode. Version 1 of the database
(UBIRIS.v1) has 1877 images of 241 individuals, ac-
quired in two distinct sessions:
• session 1 - acquisition in a controlled environ-
ment, with a minimum of perturbation, noise, re-
flection and non-uniform illumination;
• session 2 - acquisition under natural light condi-
tions.
The images, taken with a NIKON E5700 digital RGB
camera
5
, have a resolution of 200 × 150 pixels and a
pixel-depth of 8 bit/pixel, were converted to 256-level
grayscale images. Recently, a second version of the
database (UBIRIS.v2) was released to be used in the
Noisy Iris Challenge Evaluation challenge - Part I 11
(NICE.I). Figure 6 shows some test images: synthetic
(with and without noise); real images from CASIA
and UBIRIS databases.
The main features of these databases are presented
in table 1.
Table 1: Comparison of CASIA and UBIRIS database.
Database # Images Resolution
CASIAv1 756 320× 280
CASIAv3 22051 320× 280
UBIRIS 1877 200× 150
4
http://iris.di.ubi.pt/index.html
5
www.nikon.com/about/news/2002/e5700.htm
Figure 6: Test images: a) simple b) simple with noise c)
pupil and iris d) pupil and iris with noise e) UBIRISv1 f)
CASIAv3 g) CASIAv1.
Table 2: Study of CASIA and UBIRIS database. Statistical
description of the pupil diameter (in pixels).
Measure CASIA UBIRIS
Mean 86.2 23.7
Median 87 24
Mode 77 25
Minimum 65 17
Maximum 119 31
Standard Deviation 11.5 2.9
Sample Variance 132.7 8.3
4 MODIFICATIONS AND
EXTENSIONS
4.1 Study of UBIRIS and CASIA
The accuracy of pupil and iris detection is a crucial
issue in an iris recognition system. Our proposed
template matching based approach estimates the pupil
and the iris. In order to check for the performance of
this new approach, we carried out a statistical study
over UBIRIS and CASIA databases to estimate the
range of pupil diameters. For both databases, we ran-
domly collect N=90 images to carry out this study.
For each image, we have computed the center and the
radius of the pupil. Table 2 shows a statistical analysis
of the pupil diameter.
For both databases, the increase of N over 90 (pix-
els) does not change these statistical results. Figure 7
shows the histogram of the diameters for the CASIA
database, while figure 8 does the same for UBIRIS;
in this case, we see that the histogram is well approx-
imated by a normal distribution.
4.2 Pre-processing
This section describes pre-processing techniques that
we propose for UBIRIS images. The pre-processing
MODIFICATIONS AND IMPROVEMENTS ON IRIS RECOGNITION
75
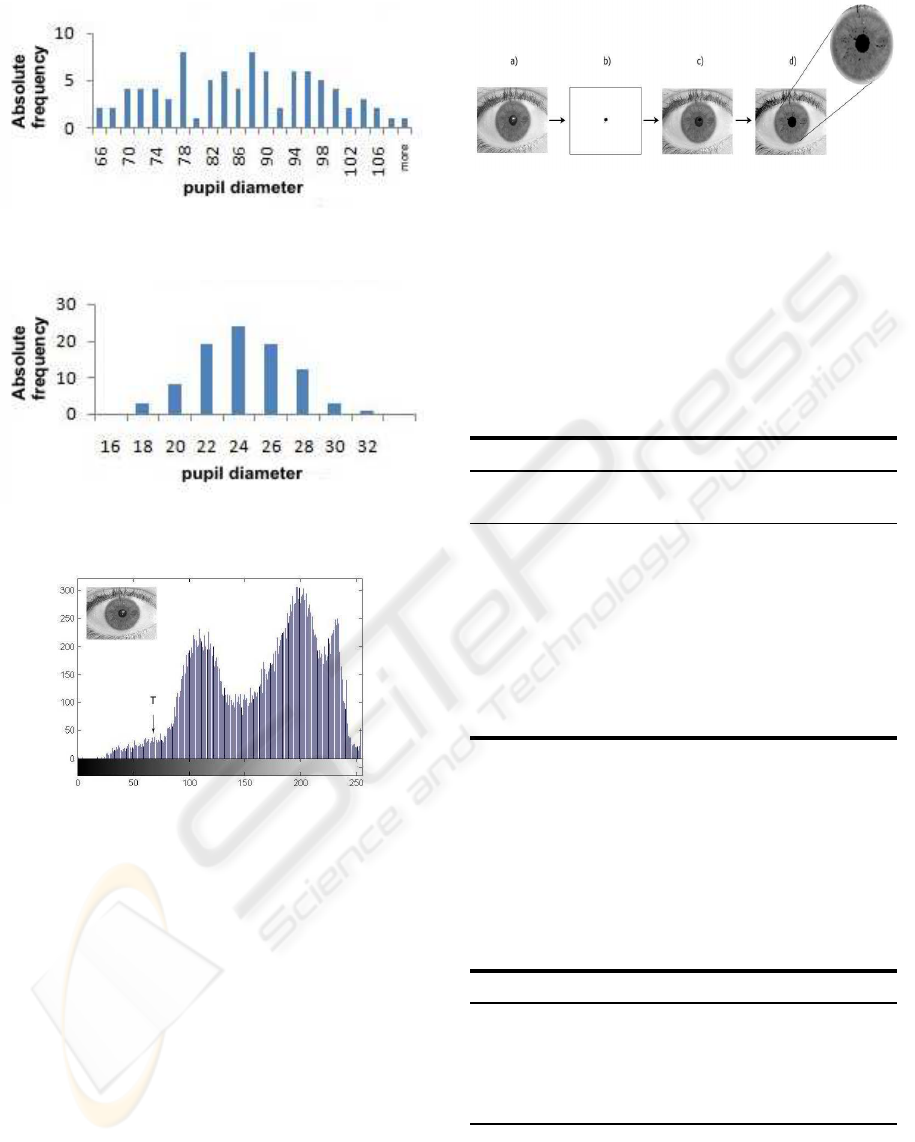
Figure 7: Histogram of pupil diameter for CASIA.
Figure 8: Histogram of pupil diameter for UBIRIS.
Figure 9: Typical histogram of an iris image.
stage removes (or minimizes) image impairments
such as noise and light reflections. Studying the im-
ages of both databases, we conclude that it is nec-
essary to use different pre-processing strategies for
each database. The pre-processing algorithms that we
have devised are intended to eliminate reflections and
to isolate the pupil. For this purpose, we propose 3
methods, named A, B and C. For pupil enhancement,
we propose another method. These methods are nec-
essary for UBIRIS database. The CASIAv1 images
are already pre-processed.
4.2.1 Method A
Taken a histogram analysis, from a set of 21 images,
we conclude that the pupil has low intensity values,
corresponding to 7% to 10% of the image. This way,
Figure 10: Reflex removal by method A: a) original image;
b) isolated reflection c) image without reflection d) image
with an uniform pupil.
we found the range of intensities between the pupil
and the iris. From this range of intensities, we com-
pute a threshold between the pupil and the iris, as de-
picted by T in figure 9.
The actions taken by method A for reflection re-
moval is as follows.
Method A for reflection removal
Input: I
in
- input image, with 256 gray-levels
Output: I
out
- image without reflections on the pupil
1. From the histogram of I
in
compute a threshold T
(as in figure 9) to locate the pupil pixels.
2. Set the pupil pixels (gray level below T) to zero.
3. Locate and isolate the reflection area, with a edge
detector and a filling morphologic filter (Lim,
1990).
4. I
out
← image with the reflection area pixels set to
zero.
Figure 10 illustrates the application of method A: on
stage a) we see a white reflection on the pupil; this
reflection is removed on stage d).
4.2.2 Method B
This method uses a threshold to set to a certain value
the pixels on a given Region of Interest (ROI).
Method B for reflection removal
Input: I
in
- input image, with 256 gray-levels
X,Y - upper-left corner of ROI
W,H - width and height of ROI
T - threshold for comparison
Output: I
out
- image without reflections on the pupil
1. Over I
in
locate the set of pixels below T.
2. Isolate this set of pixels, to form the ROI.
3. Horizontally, make top-down scan of the ROI and
for each line, replace each pixel in the line by the
average of the pixels at both ends of that line.
BIOSIGNALS 2009 - International Conference on Bio-inspired Systems and Signal Processing
76

4. I
out
← image with the ROI pixels set to this aver-
age value.
4.2.3 Method C
This third method uses morphologic filters (Lim,
1990) to fill areas with undesired effects, such as a
white circumference with a black spot. In this situa-
tion, the morphologic filter fills completely the white
circumference. This filter is applied on the negative
version of the image and after processing, the image
is put back to its original domain.
Method C for reflection removal
Input: I
in
- input image, with 256 gray-levels
Output: I
out
- image without reflections on the pupil
1.
˜
I
in
← negative version of I
in
(Lim, 1990).
2.
˜
I
p
← output of the morphologic filling filter on
˜
I
in
.
3. I
out
← negative version of
˜
I
p
.
Figure 11 shows the results obtained by this method;
we can see clearly the removal of the white reflection.
Among these three methods, this one is the fastest; it
takes (on average) about 40 ms to run on a UBIRIS
image.
Figure 11: Illustration of reflex removal by method C.
4.2.4 Pupil Isolation
After reflection removal, we introduced a pupil en-
hancement algorithm to obtain better results in the
segmentation phase. This way, we isolate the pupil
from the rest of the image. The algorithm for pupil
isolation is divided into four stages: enhancement
and smooth - apply a reflex removal method and a
gaussian filter to smooth the image; detection - edge
and contour detection of the pupil, producing a binary
image; isolation - remove the contours outside a spe-
cific area, isolating the pixels along the pupil; dilation
and filling - dilate the image and fill the points across
the pupil.
Pupil isolation
Input: I
in
- input image, with 256 gray-levels
σ - standard deviation for the gaussian filter
T - minimum number of pupil pixels
Output: I
out
- binary image with an isolated pupil
1. Remove reflections (methods A, B or C) on I
in
.
2. Apply a gaussian filter G
σ
to smooth the image.
3. Apply the Canny Edge (Lim, 1990) detector for
pupil and iris detection; retain only the pupil area.
4. While the number of white pixels is below T, di-
late the detected contours.
5. I
out
← output of the filling morphologic filter.
4.3 Segmentation
The segmentation phase is of crucial importance, be-
cause without a proper segmentation it is impossible
to perform recognition. We propose the following
methods for segmentation: versions of the integro-
differential operator; template matching. For the first
we propose the following options: version 1 - sim-
plified version of (2) without the gaussian smoothing
function; version 2 - finite difference approximation
to the derivative and interchangingthe order of convo-
lution and integration as in (Daugman, 1993); version
3 - the operator as in (2). In order to speed up the per-
formance of the operator we have considered a small
range of angles to compute the contour integral: 180
o
(θ ∈ [−π/4,π/4] ∪ [3π/4,5π/4]).
For UBIRIS, we devised a new strategy for the
segmentation phase, based on a template matching
approach. We propose to automatically segment the
image using cross-correlation between the iris im-
ages and several templates and finding the maxi-
mums of this operation. Template matching is an ex-
tensively used technique in image processing (Lim,
1990). Since the iris and pupil region have a cir-
cle format (or approximate) this technique is consid-
ered very suitable, being only necessary to use cir-
cle templates with different sizes (it not necessary
to take into account rotations of the templates). To
cope with the range of diameters, we have used sev-
eral versions of the templates. Supported by the
study presented on section 4.1, we considered a range
of diameters that covers 90% of the diameters dis-
played in figure 8, to narrow the number of tem-
plates. This way, we have choosen the set of diam-
eters D = {20,22,24, 26, 28, 30}; four of these tem-
plates are depicted in figure 12.
MODIFICATIONS AND IMPROVEMENTS ON IRIS RECOGNITION
77

Figure 12: Templates used for the proposed template
matching-based segmentation stage on UBIRIS database.
Figure 13: Developed application.
The difference between two consecutivetemplates
is two pixels. We have found that is not necessary to
consider the entire set of integers, in order to have
an accurate estimation of the diameter (this way, we
decrease the number of comparisons to half). For
the CASIA database, we proceed in a similar fash-
ion obtaining diameters D = {70,72,74, ...,124}.
The cross-correlation based template matching tech-
nique has an efficient implementation using FFT (Fast
Fourier Transform) and its inverse (Lim, 1990).
5 EXPERIMENTAL RESULTS
This section reports our experimental results obtained
with our variants and modifications to Daugman ap-
proach, obtained with our C# application. Figure 13
shows a screen shot of the developedapplication, with
the following functionalities: enrollment - register an
individual in the system; authentication - verify the
identity of an already registered user; identification -
search for an individual.
Regarding the pre-processing stage, we have
found that the reflection removal methods A, B and C
presented in section 4.2 attained good similar results
as can be seen by figures 10 and 11. The pupil en-
hancement algorithm also got good results improving
the segmentation stage.
5.1 Segmentation
For the segmentation phase of Daugman’s algorithm,
the variants described in section 4.3, regarding the
Table 3: Integro-differential operator - version 3. From
CASIAv3, the 756 images were randomly selected.
Database Success
UBIRISv1 (1877 images) 95.7 %
CASIAv1 (756 images) 98.4 %
CASIAv3 (756 images) 94 %
Table 4: Template Matching for segmentation.
Database Success
UBIRISv1 (1877 images) 96.3 %
CASIAv1 (756 images) 98.5 %
CASIAv3 (756 images) 98.8 %
integro-differential operator and template matching
were tested.
5.1.1 Integro-differential Operator
We have found that the (fast) first version of the
integro-differential operator, obtained satisfactory re-
sults only for synthetic images. The second version
performed a little better, but the results still were un-
satisfactory. Table 3 shows the percentage of success
in the detection of the diameter and center of pupil and
iris, for the third version of the operator (the slowest
and most accurate version).
On table 3, the worst results for CASIAv3 and
UBIRIS are justified by the fact that these images con-
tain reflections. The already pre-processed CASIAv1
images, as stated in section 3.1, are easier to segment,
justifying better results.
5.1.2 Template Matching
Replacing the integro-differential operator by the
template matching technique to perform the segmen-
tation, we get the results displayed in table 4.
Comparing the test results of tables 4 and 3, we
have a better results and lower processing time. In
our tests, on both databases the template matching ap-
proach runs about 7 to 10 times faster than the third
version of the integro-differential operator. The tem-
plate matching segmentation takes 0.1 and 1.5 sec-
onds for UBIRIS and CASIA, respectively. This (big)
difference is due to the larger resolution CASIA im-
ages; we have to use a larger number of templates
(4 times as for UBIRIS). Finally, considering the se-
quence template matching followed by the integro-
differential operator we run the same tests, obtaining
the results on table 5.
Comparing tables 5 and 4, we conclude that this
combination has a very small gain, only for CASIAv1
and has larger computation time than the previous ap-
BIOSIGNALS 2009 - International Conference on Bio-inspired Systems and Signal Processing
78

Table 5: Template Matching followed by integro-
differential operator for segmentation.
Database Success
UBIRISv1 (1877 images) 96.3 %
CASIAv1 (756 images) 98.7 %
CASIAv3 (756 images) 98.8 %
proach. This way, it is preferable to use solely the
template matching technique.
5.2 Recognition Rate
Using Gabor filters with eight orientations (see fig-
ure 5) and four frequencies, our implementation got
a recognition rate of 87.2% and 88%, for UBIRISv1
and CASIAv1, respectively. This recognition rate
can be improved; it is known that it is possible
to achieve higher recognition rate with Daugman’s
method on CASIAv1, using a larger IrisCode (Masek,
2003). Our main goal in this work was to show that
when we do not have infra-red already pre-processed
(CASIAv1-like) images: the reflection removal pre-
processing stage is necessary; sometimes pupil en-
hancement methods are also necessary; the segmen-
tation stage can be performed much faster with an ef-
ficient FFT-based template matching approach.
6 CONCLUSIONS
We addressed the problem of iris recognition, by
modifying and extending the well-known Daugman’s
method. We have developed a C# application and
evaluated its performance on the public domain
UBIRIS and CASIA databases. The study that was
carried out over these databases allowed us to pro-
pose essentially two new ideas for: reflex removal;
enhancement and isolation of the pupil and iris. For
the reflex removal problem, we have proposed 3 dif-
ferent methods. The enhancement and isolation of the
pupil, based on morphologic filters, obtained good re-
sults for both databases. It is important to stress that
this pre-processing algorithms depend on the image
database. Regarding the segmentation stage, we re-
placed the proposed integro-differential operator by
an equally accurate and faster cross-correlation tem-
plate matching criterion, which has an efficient imple-
mentation using the FFT and its inverse. This way, we
have improved the segmentation stage, because the
template matching algorithm is more tolerant to noisy
images, when compared to the integro-differentialop-
erator and runs faster. As future work we intend to
tune the algorithm for the noisy UBIRIS database.
REFERENCES
Arvacheh, E. M. (2006). A study of segmentation and nor-
malization for iris recognition systems. Master’s the-
sis, University of Waterloo.
Boles, W. (1997). A security system based on iris identi-
fication using wavelet transform. In L.C.Jain, editor,
First Int Conf on Knowledge-Based Intelligent Elec-
tronic Systems, pages 533–541, Adelaide, Australia.
Daugman, J. (1993). High confidence visual recognition of
persons by a test of statistical independence. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, 25(11):1148–1161.
Daugman, J. (2004). How iris recognition works. IEEE
Transactions on Circuits and Systems for Video Tech-
nology, 14(1):21–30.
Greco, J., Kallenborn, D., and Nechyba, M. C. (2004). Sta-
tistical pattern recognition of the iris. In 17th an-
nual Florida Conference on the Recent Advances in
Robotics (FCRAR).
Jain, A. K., Ross, A., and Prabhakar, S. (2004). An intro-
duction to biometric recognition. IEEE Transactions
on Circuits and Systems for Video Technology, 14(1).
J.Huang, Y.Wang, T.Tan, and J.Cui (2004). A new iris seg-
mentation method for recognition. In 17th Int Conf on
Pattern Recognition (ICPR’04).
Joung, B. J., Kim, J. O., Chung, C. H., Lee, K. S., Yim,
W. Y., and Lee, S. H. (2005). On improvement for
normalizing iris region for a ubiquitous computing.
Computational Science and Its Applications ICCSA
2005, pages 1213–1219.
Lim, J. (1990). Two-dimensional Signal and Image Pro-
cessing. Prentice Hall.
Maltoni, D., Maio, D., Jain, A. K., and Prabhakar, S. (2005).
Handbook of Fingerprint Recognition. Springer, 1th
edition.
Masek, L. (2003). Recognition of human iris patterns for
biometric identification. Master’s thesis, University
of Western Australia.
Proenc¸a, H. (2007). Towards Non-Cooperative Biometric
Iris Recognition. PhD thesis, Universidade da Beira
Interior.
Proenc¸a, H. and Alexandre, L. A. (2005). UBIRIS: a noisy
iris image database. Lecture Notes in Computer Sci-
ence ICIAP 2005 - 13th International Conference on
Image Analysis and Processing, 1:970–977.
Vatsa, M., Singh, R., and Gupta, P. (2004). Comparison of
iris recognition algorithms. In Proceedings of Inter-
national Conference on Intelligent Sensing and Infor-
mation Processing, pages 354– 358.
Wildes, R. (1997). Iris recognition: an emerging biomet-
ric technology. Proceedings of the IEEE, 85(9):1348–
1363.
Yao, P., Li, J., Ye, X., Zhuang, Z., and Li, B. (2006). Anal-
ysis and improvement of an iris identification algo-
rithm. In 18th International Conference on Pattern
Recognition (ICPR’06).
MODIFICATIONS AND IMPROVEMENTS ON IRIS RECOGNITION
79
