
BIOLOGICAL-VISION INSPIRED DSA SYSTEM FOR UAVS
Jie Yang, Larry Paarmann, Hyuck M. Kwon and Wenhao Xiong
Departmen of Electrical Engineering & Computer Science, Wichita State University,1845 Firmount St., Wichita, U.S.A.
Keywords: UAV, DSA, Bio-Inspired Vision.
Abstract: Uses of unmanned Aerial Vehicles (UAVs) have increased dramatically during the past several years, but
currently still do not have convenient access to civil airspace because there is no onboard pilot, and it’s
impossible for UAVs to “see and avoid” other aircraft. So a Detect, Sense and Avoid system is needed to
provide the UAV with instructions to steer the UAV clear of any potential collision with other traffic. An
optical based DSA system is discussed in this paper to provide the UAV with “see and avoid” capability of
at least equivalent to a piloted aircraft. DSA minimum detection range assessment, optical resolution
requirement and image array size requirement are also discussed in this paper. Also an efficient natural
vision system is presented in this paper for DSA system.
1 INTRODUCTION
Unmanned Aerial Vehicle (UAV) is a device that is
used for flight in the air that has no onboard pilot. It
performs a useful mission and can be remotely
controlled or has autonomous flight capability.
UAVs need to at least replicate a human pilot’s
ability to see and avoid problems before they will be
accepted into the national air space. So an on board
“Detect, Sense and Avoid (DSA)” system is needed.
2 DETECT, SENSE AND AVOID
SYSTEM
2.1 DSA Minimum Detection Range
“Detect, sense and avoid” (DSA) system is an
onboard system that is able to provide the UAV with
detection capability with sufficient time to identify,
assess, and take action in accordance with the
situation encountered. The goal of any DSA system
is to perform those collision avoidance functions
normally provided by a pilot in a manned aircraft.
Therefore, a DSA system will have to detect the
traffic in time to process the sensor information,
determine if a conflict exists, and take actions
according to the right-of-way rules. If pilot
interaction with the system is required, transmission
and decision time must also be included in the total
time between initial detection and the point of
minimum separation.
2.2 DSA Minimum Detection Range
The goal of any DSA system is to perform those
collision avoidance functions normally provided by
a pilot in a manned aircraft. Therefore, a DSA
system will have to detect the traffic in time to
process the sensor information, determine if a
conflict exists, and take actions according to the
right-of-way rules. If pilot interaction with the
system is required, transmission and decision time
must also be included in the total time between
initial detection and the point of minimum
separation.
Research has been worked on about UAV DSA
system requirements, and it has come to an
agreement that for the aircraft to pass “well clear”,
500 feet can be chosen as the minimum separation
distance. Which means when the DSA system
detects a possible conflict, it must take proper
actions in sufficient time so the UAV and other
aircraft can miss each other by at least 500 feet.
(Ebdon and Regan, 2004).
The UAV must be able to react to all the
obstacles that it might encounter in the operating
environment. Figure 1 shows the several steps
needed for the DSA system to avoid collision with
another aircraft. First, the detect part, onboard
sensors detect the environment continuously,
502
Yang J., Paarmann L., M. Kwon H. and Xiong W. (2009).
BIOLOGICAL-VISION INSPIRED DSA SYSTEM FOR UAVS.
In Proceedings of the International Conference on Bio-inspired Systems and Signal Processing, pages 502-505
DOI: 10.5220/0001548105020505
Copyright
c
SciTePress
collecting data about the environment to see if there
is any approaching aircraft. If an aircraft is detected,
then based on the collected data, determine if the
data indicate a collision in the near future. Then
calculate an action that the UAV can take to avoid
the collision.
If we assume that the approaching aircraft is
non-cooperative and non-maneuvering, then it is
desirable to know how long it will take the UAV to
deviate from its initial flight path by 500 feet in the x
direction, banking to the right according to FAA
rules. A worst-case scenario is a head-on potential
collision: an aircraft is flying directly at the nose of
the UAV. In this case the visual cross-section of the
approaching aircraft is smallest and most difficult to
detect, and the closing speed is the greatest. (Grilley,
2005).
This problem has been analyzed using
MATLAB for several situations.
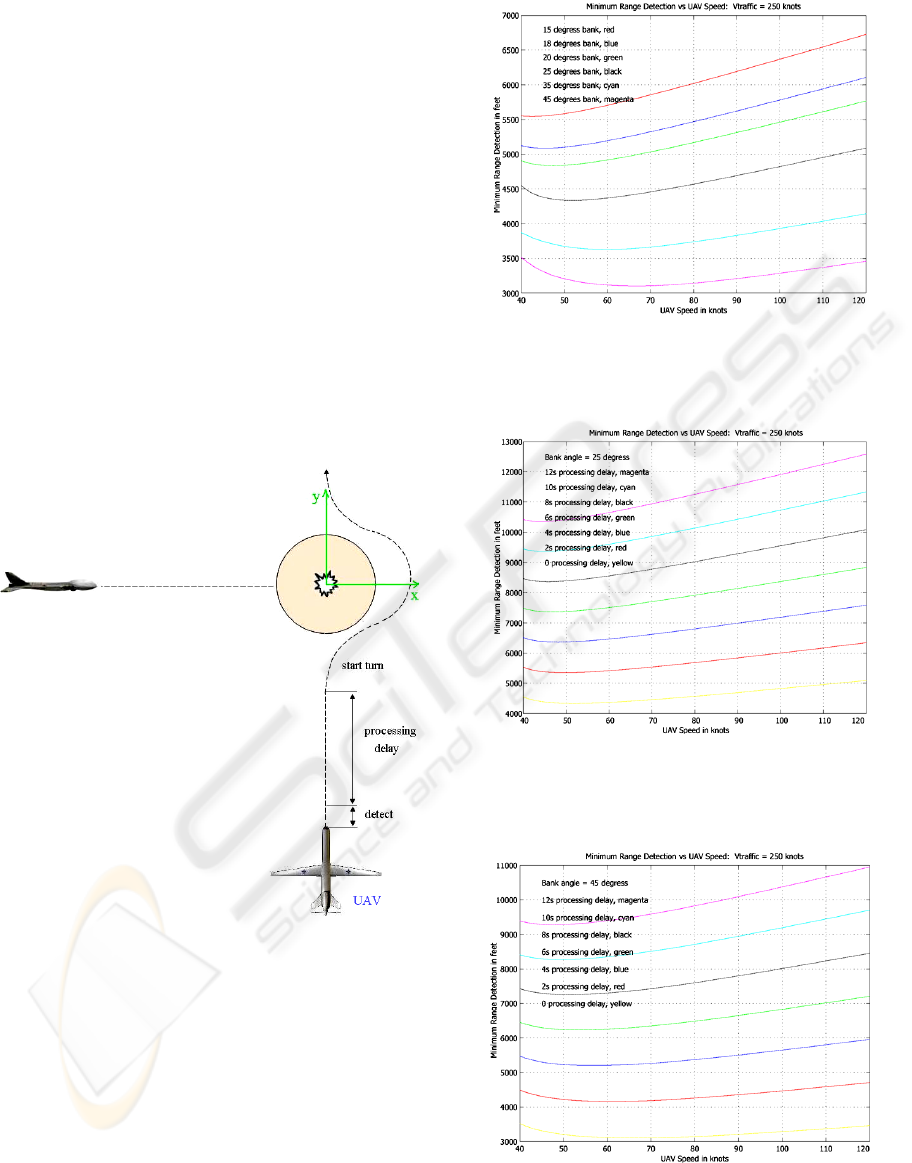
Figure 1: Several steps to avoid collision.
Suppose a UAV is flying with a straight and
level flight when it detects an oncoming aircraft
flying directly at it towards the nose of the UAV
with the same altitude and directly inline with the
UAV’s flight path. The speed of the non-
cooperating approaching aircraft is 250 knots. As a
result, the UAV takes evasive action by turning to
the right with a bank angle of
β
degrees. Assuming
the oncoming aircraft takes no evasive action. Figure
2 is the results for different bank range.
Figure 2: Minimum range detection versus UAV speed
and turning bank angle. Oncoming noncooperative head-
on traffic speed is 250 knots.
Figure 3: Minimum range detection versus UAV speed
and processing delay. Oncoming non-cooperative head-on
traffic speed is 250 knots. Turning bank angle is held
constant at 25 degrees.
Figure 4: Minimum range detection versus UAV speed
and processing delay. Oncoming non-cooperative head-on
traffic speed is 250 knots. Turning bank angle is held
constant at 45 degrees.
BIOLOGICAL-VISION INSPIRED DSA SYSTEM FOR UAVS
503

Same situation as above except that here a
processing delay is considered. When a target is
detected there are several delays that add up to the
accumulative processing delay before the turn is
executed. These times are the time it takes to detect
the target, the time it takes to track the target, and
the time it takes to make the decision that a turn to
avoid collision is required. The sum of these times
are referred to here as the processing delay. Due to
the processing delay the target moves closer to the
UAV before the UAV begins its turn, and the UAV
also moves towards the target. Figure 3 is the results
for 25 degrees bank angle. Figure 4 is the results for
45 degrees bank angle.
As can be seen from Figures 2, 3, and 4, the
minimum range for detection is dependent on the
bank angle and the processing delay. Therefore it is
highly desirable to minimize the processing delay as
much as possible and to bank the UAV as much as
possible. With a UAV speed of 60 knots the
minimum range for a bank angle of
15°
and a
processing delay of 12 seconds is about 10,700 feet
(2.03 smi). With a UAV speed of 60 knots, the
minimum range for a bank angle of
45°
and a
processing delay of 2 seconds is about 4,200 feet
(0.8 smi). For the purposes of this study, we will let
the bank angle be
o
25
and the processing delay be 8
seconds. Under those conditions, for a UAV speed
of 60 knots the minimum detection range is 8,600
feet (1.63 smi).
Given that the horizontal angle of view for the
nose camera is
o
60
and that the vertical angle of
view is
30 ,°
and that the minimum detection range is
8,600 feet, and assuming a oncoming non-
cooperative aircraft has a visual frontal cross-section
of 4.47 feet (worst-case), (Grilley, 2005), Then
cross-section of 4.47 feet is equivalent of
0.027°
of
horizontal and vertical resolution, or
0.47 .mrad
From above, for the image to occupy an area of four
pixels at the minimum detection range, then the
array would need to be 2,222 pixels by 4,444 pixels
(9.87Mpixels).
2.3 Optical based DSA System
The optical based DSA system usually consists of
three major components: optical sensors, detection
processors and a track processor.
2.3.1 Comparison of Optical Sensors
Both CCD and CMOS sensors can be used as optical
sensors to capture images for DSA system. To
decide which kind of sensor is better for DSA
system, a thorough comparison is needed.
Generally CCD has high sensitivity, high
resolution, large dynamic range, and large array size,
while APS has the benefit of low-power operation,
high speed, and ease of integration. Small UAVs’
limited payload capability, size, dimension, weight
and power consumption make CMOS-based sensors
a good choice for DSA system if resolution
requirement can be fulfilled.
The number of sensors is flexible, technically
one optical sensor is fine, but to detect as wide range
of view as possible, three is the minimum possible
number of optical sensors.
2.3.2 DSA Configuration
If CCD is used as sensors, the DSA system must
have separate sensors and processors. Figure 5
shows a typical DSA system configuration. (Utt,
McCalmont and Deschenes, 2005). This system
consists of three CCD optical sensors, FPGA based
image processors that compute the optical flow of
the sensor scenes, and a track filter that merges and
declares tracks of detected aircraft.
Figure 5: DSA configuration.
If CMOS is used as sensors, then readout circuitry
and processing circuitry can be embedded on-chip
together with the sensing circuitry. Such embedding
can happen either pixel-by-pixel (in-pixel circuitry),
or at chip level (off-pixel circuitry), or as a
combination of both. In-pixel processing circuitry
can be used to obtain high-speed through parallel
BIOSIGNALS 2009 - International Conference on Bio-inspired Systems and Signal Processing
504

processing in tasks where many data are involved
such as image feature extraction, motion estimation.
Then, off-pixel embedded digital processors can be
used for control and high-level processing tasks. The
combination of in-pixel and off-pixel processing can
be used to speed up the computations needed to
adapt the sensor response to changing conditions in
the environment, this makes the sensor capable of
acquiring images with high dynamic range, which is
an important parameter for optical sensors.
3 BIOLOGICAL MODELS FOR
DSA
This DSA system should be able to provide the
relative position of the traffic and a velocity
indication. This allows the system to predict the
traffic’s flight path and determine whether there will
be a conflict. If a conflict is predicted, the system
can act to avoid it in time. So not only should a DSA
system be able to determine the position and
velocity of another approaching aircraft, but also can
“see” the aircraft early enough to avoid the collision.
Due to the large amount of data contained in
images, rapidly changing image flows in real-time
could be a big challenge. To get DSA systems work
efficiently, a new solution, bio-inspired vision
system can be used here. Since visual detection of
motion is essential to survival, many animal species,
like insects, have evolved to have large neurons in
the brain to be good at detecting and reacting to the
motion of an approaching object. The knowledge of
the neural circuitry can be used here to construct
artificial vision systems for DSA. (Cembrano, et al.,
2008)
Natural vision systems have been improved
through millennia of evolution and are more robust
and efficient than artificial counterparts. Many
insects rely on vision to control its own movements
and observe that of others around it. They are also
able to perform these tasks within a wide range of
lighting conditions. This is a perfect biological
example of natural DSA system. The correct
operation of the DSA system requires proper image
acquisition at the optical sensor layer. So the sensors
and image processing module should have the ability
to handle wide illumination ranges.
4 CONCLUSIONS
Due to the advantages of UAVs over manned
aircraft for many applicable situations, the
permission of UAV flying in commercial airspace
could be an amazing start of many potential
applications. To open this door, a mature see and
avoid system on board is a necessity. There are
several kinds of detect, sense and avoid solutions for
UAV DSA, among which optical based DSA system
is applicable for small UAVs because its size,
dimension, weight and power consumption can be
minimized. And a new efficient bio-inspired vision
system can be introduced into DSA system to handle
the huge amount of image data flows in real-time.
There are still many details to work on for DSA
system, such as system minimization, mature image
processing module development, etc., with all these
works ongoing, hopefully it won’t take long for
UAVs to get access to civil space.
REFERENCES
Cembrano, G., Carranza, L., Rind, C., et al., 2008. Insect-
vision inspired collision warning vision processor for
automobiles. In IEEE circuits and systems magazine.
Second quarter.
Ebdon, D., Regan, J., 2004. White paper, sense-and-avoid
requirement for remotely operated aircraft(ROA). In
HQ ACC/DR-UAV SMO.
Grilley, D., 2005. Resolution Requirements for Passive
Sense & Avoid. Available online from
http://www.uavm.com/images/GRILLEY_.PDF
Utt, J., McCalmont, J., Deschenes, M., 2005.
Development of a sense and avoid system. In
American Institute of Aeronautics and Astronautics,
Sep. 26-29. Arlington, Virginia.
BIOLOGICAL-VISION INSPIRED DSA SYSTEM FOR UAVS
505
