
COMPETITIVE AND COOPERATIVE SOLUTIONS FOR
REMOTE EYE-TRACKING
Giovanni Crisafulli, Giancarlo Iannizzotto and Francesco La Rosa
Visilab, Faculty of Engineering, University of Messina, Contrada Di Dio (S. Agata), Messina, Italy
Keywords: Eye-tracking, Image analysis, Competitive approach, Cooperative approach.
Abstract: Reliable detection and tracking of eyes is an important requirement for attentive user interfaces. In this
paper, we present an innovative approach to the problem of the eye-tracking. Traditional eye-detectors,
chosen for own properties, are combined by two different schemes (competitive and cooperative scheme) to
improve own robustness and reliability. To illustrate our work, we introduce a proof-of-concept single
camera remote eye-tracker and discuss its implementation and the obtained experimental results.
1 INTRODUCTION
Eye Tracking (ET) is the process of measuring eye
positions and eye movements in a sequence of
images (Ji and Zhu, 2004), (Morimoto et al., 1998b).
Specifically, detection and tracking of the iris or
pupil can be used to infer the direction of interest of
the human subject, this is denoted gaze (Matsumoto
and Zelinsky, 2000).
By tracking the eye-gaze of a user, valuable
insight may be gained into what the user is thinking
of doing, resulting in more intuitive interfaces and
the ability to react to the users’ intentions rather than
explicit commands (Jacob, 1991), (Morimoto and
Mimica, 2005).
Also, gaze can play a role in understanding the
emotional state for humans, syntesizing emotions,
and for estimation of attentional state. Specific
applications include devices for the disabled, e.g.,
using gaze as a replacement for a mouse and driver
awareness monitoring to improve traffic safety
(Coifman et al., 1998).
Early eye-tracker (and eye gaze tracker) were
developed for scientific exploration in controlled
environments or laboratories. Eye gaze tracking
(EGT) data have been used in ophthalmology,
neurology, psychology, and related areas to study
oculomotor characteristics and abnormalities, and
their relation to cognition and mental states.
Successful attempts are still limited to military
applications and the development of interfaces for
people with disabilities.
To be applied in general computer interfaces, an
ideal eye tracker should be accurate, reliable, robust
(should work under different conditions, such as
indoors and outdoors, for people with glasses and
contact lenses, etc), non-intrusive, allow for free
head motion, not require calibration and to have
real-time response.
Our work is concerned with the usability, the
reliability and the robustness of eye-trackers for
general applications. As a proof-of-concept, we
propose a single camera remote eye-tracker that use
two different schemes (competitive and cooperative)
to merge (Freund and Schapire, 1997) the results of
some eye-detectors. An improving of the robustness
and reliability is obtained.
The paper is organized as follows. In Section 2
we describe the main ET approaches to be found in
the literature. In sections 3 we describe the system
we propose. In Section 4, we give details of the
experimental results obtained. Finally, in Section 5,
we present our conclusions and some indications of
future development.
2 RELATED WORKS
Detection of the human eyes is a difficult task due to
a weak contrast between the eye and the surrounding
skin. As a consequence, many traditional techniques
for ET and EGT are intrusive, i.e., they require some
equipment to be put in physical contact with the
user. These techniques include, for example, contact
521
Crisafulli G., Iannizzotto G. and La Rosa F. (2009).
COMPETITIVE AND COOPERATIVE SOLUTIONS FOR REMOTE EYE-TRACKING .
In Proceedings of the International Conference on Bio-inspired Systems and Signal Processing, pages 521-528
DOI: 10.5220/0001555105210528
Copyright
c
SciTePress

lenses, electrodes, and head mounted devices
(Morimoto and Mimica, 2005). Non-intrusive
techniques (or remote techniques) are mostly vision
based (Ji and Zhu, 2004), (Morimoto et al., 1998a),
(Hsu et al., 2002), i.e., they use cameras to capture
images of the eye. Some camera-based techniques
might be somewhat intrusive if they require to be
head mounted (Babcock and Pelz, 2004), (Li et al.,
2005), (Li et al., 2006).
For diagnostic applications, where eye data can
be recorded during a short experiment and processed
later, the time required to setup the eye tracker and
the discomfort that the equipment might cause do
not constitute a problem. This is also true for a few
interactive applications where the user has to depend
heavily on the eye tracker to accomplish some task
(i.e., there is little choice or no alternative device).
A remote eye tracker (RET) offers comfort of
use, and easier and faster setup, allowing the user to
use the system for longer periods than intrusive
techniques. Although the accuracy of RETs is in
general lower than intrusive ETs, they are more
appropriate for use during long periods. The pupil–
corneal reflection technique (Zhu and Ji, 2005),
(Morimoto et al., 1998a) is commonly advertised as
a remote tracking system that is robust to some head
motion.
Camera-based EGT techniques rely on some
properties or characteristics of the eye that can be
detected and tracked by a camera or other optical or
photosensitive device. Most of these techniques have
the potential to be implemented in a non-intrusive
way.
The limbus and the pupil are common features
used for tracking (Daugman, 1993), (Haro et al.,
2000). Limbus is the boundary between the sclera
and the iris. Due to the contrast of these two regions,
it can be easily tracked horizontally, but because the
eyelids in general cover part of the iris, limbus
tracking techniques have low vertical accuracy. The
pupils are harder to detect and track because of the
lower contrast between the pupil–iris boundary, but
pupil tracking techniques have better accuracy since
they are not covered by the eyelids (except during
blinking).
To enhance the contrast between the pupil and
the iris, many eye trackers use an infrared (IR) light
source (Zhu and Ji, 2005), (Morimoto et al., 1998a) .
Because IR is not visible, the light does not distract
the user.
Sometimes, the IR source is placed near the
optical axis of the camera. Because the camera now
is able to ‘‘see’’ the light reflected from the back of
the eye, similar to the red eye effect in night
photography using a bright flash light, the camera
sees a bright pupil instead of a regular dark pupil.
The light source can also generates a corneal
reflection (CR) or glint on the cornea surface, near
the pupil. This glint is used as a reference point (Li
et al., 2005) in the pupil–corneal reflection technique
for EGT.
Due to the use of active IR lighting, this
technique works better indoors and even in the dark,
but might not be appropriate outdoors, because
sunlight contains IR and the pupils become smaller
in bright environments.
The literature offers several techniques for
detecting eyes directly (Kawato and Tetsutani,
2002a; 2002b), or as a sub-feature of the face (Hsu
et al., 2002). Faces can be detected from background
subtraction, skin color segmentation, geometric
models (Li et al., 2005) and templates (Matsumoto
and Zelinsky, 2000), artificial neural networks (Ji
and Zhu, 2004), etc.
Direct methods for eye detection use spatial and
temporal information to detect the location of the
eyes.
Their process starts by selecting a pool of
potential candidates using gradient fields and then
heuristic rules and a large temporal support are used
to filter erroneous pupil candidates.
The use of a support vector machine (SVM)
avoids falsely identifying a bright region as a pupil:
the pupil candidates are validated using SVM (Zhu
and Ji, 2005) to remove spurious candidates.
Instead of using explicit geometric features such
as the contours of the limbus or the pupil, an
alternative approach is to treat an image as a point in
a high-dimensional space. Techniques using this
representation are often referred to as being
appearance-based or view-based (Black and Jepson,
1998).
In (Haro et al., 2000) applies a linear principal
component analysis approach to find the principal
components of the training eye patches. In (King and
Xu, 1997) use a probabilistic principal component
analysis to model off-line the intra-class variability
within the eye space and the non-eye distribution
where the probability is used as a measure of
confidence about the classification decision.
The method proposed in (Ji and Zhu, 2004) also
does not use explicit geometric features. They
describe an EGTer based on artificial neural
networks (ANN). Once the eye is detected, the
image of the eyes is cropped and used as input to a
ANN. Training images are taken when the user is
looking at a specific point on a computer monitor.
BIOSIGNALS 2009 - International Conference on Bio-inspired Systems and Signal Processing
522
Finally, when some pupils are detected, the
information about its position and velocity can be
passed to a tracker module (Shi and Tomasi, 1994),
(Bouguet, 1999) to enforce motion tracking stability.
Kalman filtering is often used to predict pupils
position in current frame, therefore greatly limiting
the search space. Sometimes, Kalman filtering can
be improved by mean-shift tracking (Ji and Zhu,
2004), which tracks an object based on its intensity
distribution.
3 SYSTEM
In this paper we propose an innovative passive
remote ET system that uses hardware off-the-shelf,
whose performances are independent from the
lighting conditions (natural or artificial).
Our ET system uses several ET techniques
without the needs of any initial calibration. An
advantage from Optical Flow (Tomasi and Kanade,
1992) has been taken.
The main contribute of our work is to obtain an
accurate and robust estimate of eye-position, using
some eye-detection techniques described later,
according to two different schemes, called in this
paper competitive and cooperative scheme.
In the first scheme, frame by frame, it’s
estimated the reliability of each technique and then
it’s chosen which one to use. In the second scheme,
for each frame, all techniques contribute to the
determination of the final results.
To develop the schemes, we analyzed the
different performances of each eye-detection
technique according to the operating conditions:
lighting conditions, dynamic of the user, partial iris
occlusions, and distance of the user from the camera.
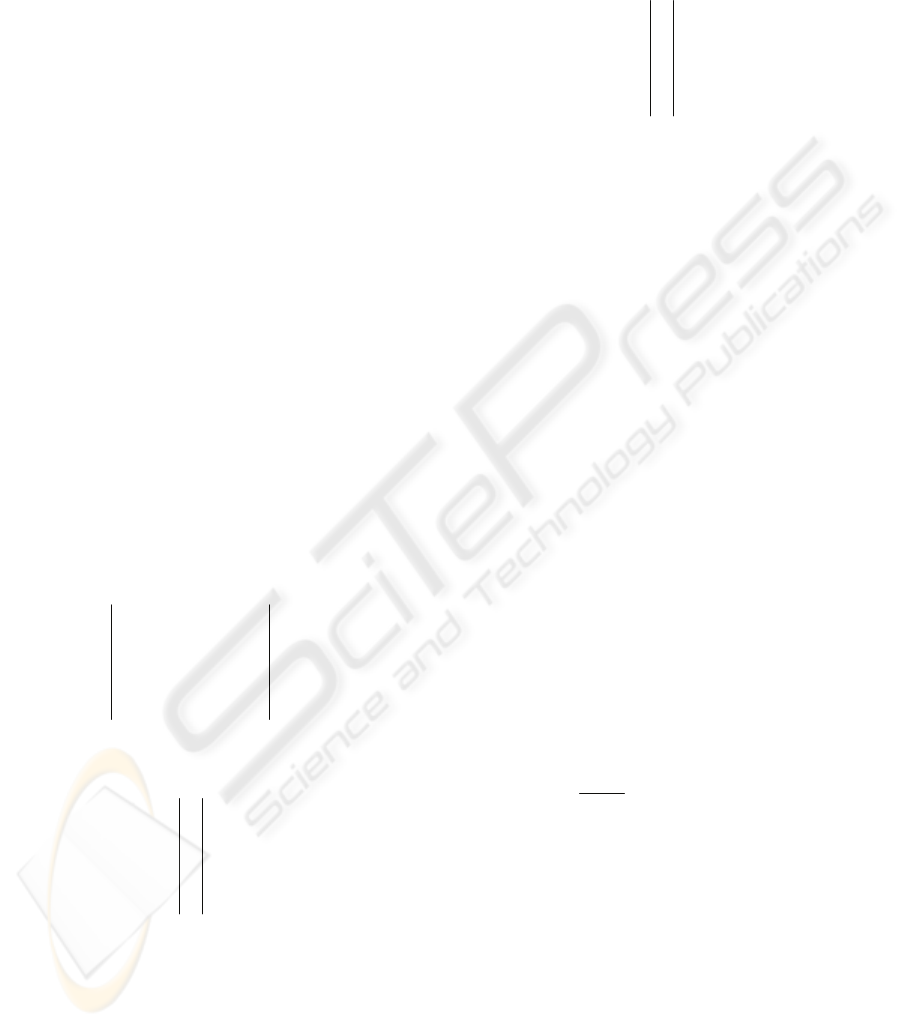
Figure 1: The main operational phases of the system.
As shown in Figure 1, each frame is elaborated
by a face detector. It returns, eventually, a Region
Of Interest (ROI) that encloses the face of the
“observed” user. The region returned from the face
detector is elaborated to define two Eye-ROI (E-
ROI) that will enclose the eyes of the user. The face
detection is obtained using a boosted classifier
(Freund and Schapire, 1996) based on Haar-like
features (Viola and Jones, 2001) and improved in
(Lienhart and Maydt, 2002).
To select the E-ROI we have tried to use the
method proposed in (Peng et al., 2005), but in
according to the measures that we have realized, we
use some parameters determined empirically.
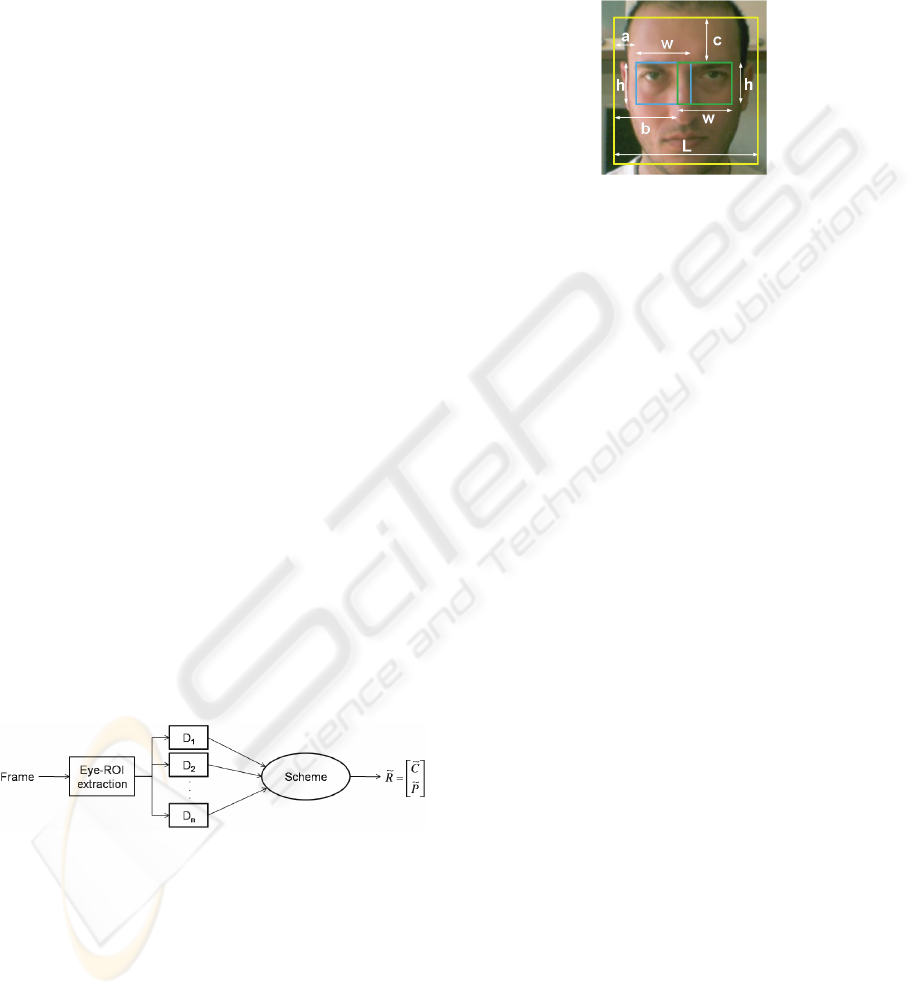
Figure 2: Eye-ROI definition.
Let L be the side length of the Face-ROI, the
anchor point of the E-ROI on left will have the
following coordinates (a,c), referred to the top-left
of Face-ROI. The E-ROI will have a width equal to
w and a height equal to h. In our system, we use
a=L/6, c=L/3.6, w= L/2.8 and h=L/3.7.
The same size, but with a different anchor point,
is used for the other E-ROI (see Figure 2).
Also in our system, the choice of the number of
detection techniques adopted is exclusively limited
by the available computational resources. We use six
eye-detection techniques, selected for them
complementary properties (Section 4).
A brief description of the detection algorithms
adopted is presented in the following section.
3.1 Eye-Detection
The first eye detection technique that we use is
described in (Daugman, 1993) and was used,
originally, as pre-processing step into an iris
recognition system.
The algorithm returns the coordinates of pupil
centre. Daugman asserts that the technique is
optimum (it will certainly find the optimum contour)
but it is computationally expensive, because the
number of contours elaborated depends on the
analyzed region size. This technique offers the
further advantage to be robust respect to iris
occlusions due to the overlap of eyelid on iris.
On the other hand, when the user wear glasses
the accuracy results is considerably lower than in
normal operating conditions.
The second technique is proposed in (Hsu et al.,
2002). In this case, the detection of eyes is obtained
processing the acquired frame in the YCbCr color
space. The original algorithm was modified to work
with E-ROI.
COMPETITIVE AND COOPERATIVE SOLUTIONS FOR REMOTE EYE-TRACKING
523

An EyeMap is obtained processing the E-ROI in
the YCbCr space. In EyeMap, pixels around the eye
are characterized by high value. Finally, the EyeMap
is processed with a Dilation operator and then
thresholded. After the extraction of the Connected
Components (CC) in the EyeMap, the system
calculates the barycentre of the one with the greatest
area (and bounding box with width/height ratio
between 0,6 and 1,4).
The calculated barycentre is an estimate of the
eye-position for this technique.
This technique, in good and uniform lighting
conditions, has proved to be robust and accurate.
Performance doesn’t vary significantly raising
distance from camera (in a maximum distance of
60cm). Glasses reduce the performances for this
technique too. False positives and/or false negatives
can be returned by this technique, especially with
noise and shadows
.
The third technique process the E-ROI into
HSV space.
In this case we take advantage of the high
saturation in light reflection by the pupil. The pupil
is characterized by low value in RGB space, and,
with natural lighting conditions, it can reflect light
with high saturation
.
In order to extract the pupil centre the input E-
ROI histogram is equalized. We use the maximum in
the saturation image to threshold it with threshold
value T
3
. Now we extract the Connected
Components (CC) as before.
The technique has shown good results and
responsively in acceptable lighting conditions also
when the user is moving.
The detection technique presents good results
also when the user wears glasses. It can obtain
detection errors with a cluttered background into E-
ROI.
The fourth technique uses the intensity of the
light reflected by the pupil. That, in fact, is a
minimum of brightness into E-ROI.
Analyzing red channel we reduce the shadow
presents into E-ROI. Background, eyebrows and
glasses with dark frame, if enclosed into E-ROI, are
the principal “obstacles” for this technique.
The fifth technique use two convolution masks
customly designed for eye detection. These were
defined using typical circular shape and
characteristic gray level in the iris-sclera complex.
In our implementation we used the masks shown
in eq. 1
221
113
221
1
−
−−
−
=K
122
311
122
2
−
−−
−
=K
(1)
A schematic representation of this technique is
shown in Figure 3.
Figure 3: The main operational phases of fifth technique.
Glasses don’t modify the technique’s
performances, also with dark frame. The detection
isn’t affected from shadows in region close to eye.
The method proposed to find eyes doesn’t guarantee
the desired continuity and precision. There are cases
in which the resultant mask has a single large CC,
almost equal to E-ROI themselves. Instead it can’t
locate CC when there are excessive movements or
reflections. This technique has a decrease of
performances in the presence of cluttered
background.
The latest and sixth technique used for eye
detection is based on global relation between pixels
of image. We take advantage of Hough Transform
(Gonzalez and Woods, 2002) to extract
circumferences into E-ROI previously elaborated by
some mathematical morphology operators.
The circumferences that we search are the pupil
and iris. Iris and pupil detection is obtained applying
the Hough Transform to the edges detected by
Canny’s Operator (Canny, 1986).
Hough presents precision and accuracy that
don’t vary significantly raising distance from camera
(max 60cm). On the other hand, in case of bad
lighting operating conditions, Hough Transform can
return high number of false positives or no response.
As for Daugman technique it needs considerable
computational resources so it limits the number of
techniques that can be used.
Finally, its performances decrease highly with
sudden movements of the user.
3.2 Competitive and Cooperative
Schemes
Now we describe the schemes that we use to merge
the results obtained by the single adopted
techniques. Each technique returns an estimate
BIOSIGNALS 2009 - International Conference on Bio-inspired Systems and Signal Processing
524
(Xi=(x
i
,y
i
) with i=1,2,…,N) of the eye position that
is the barycentre of the pupil into image. This is the
core of our system, and we’ll try to demonstrate that
cooperative and competitive schemes can return
more accurate result than the described techniques.
Competitive scheme aim to determine online
which technique used offers the better results. After
few frames, our system will be, already, capable to
establish which technique is the most reliable.
The approach’s peculiarity is that we consider
possible a variation of operating conditions at any
time. In fact, when the operating conditions of the
system change, we can use, again, the techniques
that before was considered not reliable. This
peculiarity is capital when, for example, lighting
operating conditions and/or distance of the user from
the camera change. Also the camera can change
automatically some its setup (Automatic Gain
Control, Auto Iris, Back Light Compensation,
Exposure); we used low cost cameras.
The competitive scheme takes advantage of three
principal information: the set of points returned from
the techniques, the “hit” probabilities of the
techniques and the estimated point (X*=(x*,y*))
obtained by the Optical Flow (OF) (Tomasi and
Kanade, 1992). OF is used in our system to provide,
using historical results, a prediction useful in
processing of the next frame.
First of all, we define a matrix of the distances D
(see eq. 2). The elements of D are the relative
distances, expressed in pixel, between the points
returned from the eye-detection techniques.
0
0
0
21
221
112
…
…………
…
…
NN
N
N
dd
dd
dd
=D
(2)
D is a symmetric NxN matrix (in our case N=6).
We now introduce the proximity vector V:
N
v
v
v
V
2
1
=
(3)
The elements v
i
quantify the number of
techniques that return a point near to the estimate of
i
th
technique, depending from the elements of D,
according to the eq. 4 and eq. 5.
∑
=
=
N
j
iji
v
1
δ
(4)
with
⎩
⎨
⎧
<≠
=
otherwise 0
5 and if 1
ij
ij
dji
δ
(5)
Then we define the overlap vector S:
N
s
s
s
S
2
1
=
(6)
with
⎪
⎩
⎪
⎨
⎧
≠>⋅
=
∑
=
otherwise 0
and 0 v
ij
1
jid
s
N
j
ijij
i
δ
(7)
s
i
value will be directly proportional to the
distances
d
ij
and inversely proportional to v
i
. In our
purpose, overlap vector is an estimate of the
techniques reliability. In fact, we consider
reasonable that a measure is as more reliable as more
similar to the other estimates obtained.
It remains to choose the techniques that
presumably have correctly responded. We consider
reliable the techniques with
s
i
equal to the minimum
value of
S (s
min
). This first analysis allows to
deducing that one or more eye detection techniques
can be considered reliable. This information will be
used by them for a transitional period chosen equal
to
M frames. After the first M frames we enrich our
processing considering the historical results (in our
implementation
M is equal to 20). To consider the
historical behavior of the system, a counter (
n
i
) is
associated to each technique and we increase his
value at each hit (
s
i
=s
min
). The value of the counter
can be used to determine a prior probability (see eq.
8) related to the reliability of the obtained
estimation. The described method is summarized in
Table 1
∑
=
=
N
j
j
i
i
n
n
p
1
with Ni ,...,1=
(8)
Finally we sum the prior probabilities (see eq. 9
and eq. 10) of the techniques with minimum
s
i
:
∑
i
ii
δp=p* with
Ni ,...,1=
(9)
⎩
⎨
⎧
=
=
otherwise 0
s if 1
mini
s
i
δ
(10)
If p* is bigger than a prefixed threshold (p*>T),
then we select the point returned by most probable
technique, among techniques that have s
i
=s
min
.
COMPETITIVE AND COOPERATIVE SOLUTIONS FOR REMOTE EYE-TRACKING
525
On the contrary case, we chose between
X* and
the technique which return closest result to this.
In our experiments we chosen a threshold T
equal to 0,6.
In the latest case, we preferred to take as final
result one output of the eye detection method
described before, only if that is distant less than K
pixel (in our measures K=5) from
X*.
After the first M frames:
If p*≥T is returned the result of the technique
with maximum p
i
(and with distance from X*
less than K);
If p*<T, and exist at least one X
i
with distance
from
X* less than K pixel, is returned the
result offered from the technique that is
nearest to
X*;
If p*<T and doesn’t exist at least one X
i
with
distance from
X* less than K pixel, we discard
all results and return
X*;
After M frames, we also use different increasing
method for the counters n
i
.
In the first case, the counters will be increased
for each technique with s
i
=s
min
.
In the second case, the counter of the successful
technique will be increased.
In the third case, we won’t increase any counter.
Now it is spontaneous to assign to this kind of
approach the appellation of adaptive.
In fact, as more the playing techniques will cover
several cases as more the system will reply
precisely, robustly and with accuracy.
However in the competitive scheme the final
result can depend from different techniques in
different frames.
Cooperative approach, instead, take advantage
from the efforts of the all techniques that give results
using a particular evaluation criteria.
It’s based on two operations:
Barycentre calculus of all points (see eq. 11);
Estimation of new barycentre under 2σ
hypothesis.
()
⎟
⎟
⎟
⎟
⎠
⎞
⎜
⎜
⎜
⎜
⎝
⎛
≡≡
∑∑
==
n
y
n
x
yx
n
i
i
n
i
i
BB
11
,,B
(11)
Where n is the number of technique that returns
a result.
After that is determined the standard deviation σ:
n
=σ
n
=i
i
∑
−
1
2
BX
(12)
All the points returned by the techniques that are
less than 2σ distant from
B will be used to calculate
the new barycentre that will be the output of the
cooperative scheme. We can assert that this
algorithm aspires to eliminate the outliers to improve
the accuracy results.
4 EXPERIMENTAL RESULTS
The system was tested during and after development
by several users for a considerable number of hours
in numerous environments with different external
lighting conditions.
To evaluate the performance of the system in
terms of accuracy and repeatability a considerable
number of tests were carried out.
To produce a quantitative evaluation we
compared the output of our system with a ground-
truth reference obtained by manual segmentation of
the video tests.
An estimation of the whole error (due to the
system) can be evaluated from the comparison
between the acquired coordinates and those of the
manual segmentation (ground truth).
Carrying out then a statistical analysis on the
measures we obtained information about the
precision of the system calculating the mean error
and the standard deviation of the error.
Such errors are expressed in pixel or fractions of
pixel.
The measures have been realized asking 5 users
to test 3 times the system using the graphic interface
of the operating system and most commonly used
applications.
Results obtained confirm validity of proposed
solutions and allow an accuracy, precision and
robustness comparing between the schemes and eye-
detection techniques.
In Table 1 are summarized information related to
the operating conditions of the measures, such as
lighting type, number of webcam adopted, eventual
worn glasses and/or shadows.
Table 1: Operating condition in experimental results.
Subject Glasses Webcam
Halogen
lamp
Filament
lamp
1 No 3 Yes
2 Yes 3 Yes
3 No 2 Yes
4 Yes 3
5 No 2
As we said, we have chosen the six techniques
for them complementary properties. A confirm of
this is shown in Table 2 where we can see a
schematic presentation of the principal properties of
the techniques adopted.
BIOSIGNALS 2009 - International Conference on Bio-inspired Systems and Signal Processing
526

Table 2: Principal properties of the techniques adopted. (a:
tolerate movements, b: tolerate glasses, c: independent to
the distance from camera, d: need low computational
resources, e: tolerate occlusions, f: tolerate shadows)
a b c d e f
T1
- n - n y -
T2
y n y - y n
T3
y y n y - n
T4
- n - y y y
T5
n y - - n y
T6
n y y n n n
In Table 3 we present a direct comparison
between the results obtained by the two schemes and
the single eye-detection techniques. We indicated
the competitive scheme with S1 and cooperative
with S2. The single technique (T) is numbered in
according to the order followed in this paper.
For each technique and scheme we report the
mean error and standard deviation in pixels. We
measure the response rate (%) for each technique
and we show the further improvement introduced by
the schemes. Response rate indicate the number of
case in which a technique give a result.
Table 3: Experimental results (E: mean error; σ: standard
deviation; %: response rate).
S1 S2 T1 T2 T3 T4 T5 T6
E
6,1 6,4 8,8 6,5 8,1 6,7 12,9 11,5
σ
6,3 6,5 8,2 6,0 7,5 6,5 9,2 6,8
%
98,1 95,8 87,0 72,2 76,4 68,2 59,2 41,4
The results show that the schemes implemented
reduce considerably mean error of the single
techniques. The schemes also provide more
continuity and robustness in offering results,
contrarily to the single techniques.
5 CONCLUSIONS
In this paper, we proposed an innovative approach to
the problem of the Eye-Tracking. Traditional eye-
detectors, chosen for its properties, are merged by
two different schemes (competitive and cooperative
scheme). The described approach features high
reliability and high robustness to noise and bad
illumination. To illustrate our work, we introduced
a proof-of-concept single camera remote eye-tracker
and discussed its implementation and the obtained
experimental results. More applications of the
proposed approach are currently being investigated
in our Lab to portable, handheld and wearable
computers. At the moment, the main issues being
dealt with are computational cost and power
consumption reduction. Finally, we are realizing a
comparative study on a number of (more)
sophisticated different cooperative schemes to obtain
a further improvement in accuracy and reliability.
REFERENCES
Viola, P., Jones, M., 2001. Rapid Object Detection using a
Boosted Cascade of Simple Features. In CVPR’01,
International Conference on Computer Vision And
Pattern Recognition. IEEE Computer Science Society.
Lienhart, R., Maydt, J., 2002. An Extended Set of Haar-
like Features for Rapid Object Detection. In ICIP’02,
International Conference on Image Processing. IEEE
Signal Processing Society.
Freund, Y., Schapire, R., 1996. Experiments with a new
boosting algorithm. In ICML’96, International
Conference on Machine Learning. Morgan Kaufmann.
Gonzalez, R., Woods, R., 2002. Digital Image Processing.
Prentice Hall Press, 2
nd
edition.
Freund, Y., Schapire, R., 1997. A Decision-Theoretic
Generalization of On-Line learning and an application
to boosting. Journal of Computer and System
Sciences, Elsevier Inc.
Hsu, R., Abdel-Mottaleb, M., Jain, A., 2002. Face
detection in color images. Transactions on Pattern
Analysis and Machine Intellegence. IEEE Computer
Science Society.
Coifman, B., Beymer, D., McLauchlan, P., Malik, J.,
1998. A real-time computer vision system for vehicle
tracking and traffic surveillance. Transportation
Research Part C 6. Elsevier Inc.
Babcock, J., Pelz, J., 2004. Building a lightweight
eyetracking headgear. In ETRA’04, International
Symposium on Eye Tracking Research and
Applications. ACM Press.
Ji, Q., Zhu, Z. 2004. Eye and gaze tracking for interactive
graphic display. Machine Vision and Applications.
Springer.
Tomasi, C., Kanade, T., 1992. Shape and motion from
image streams under orthography: a factorization
method. International Journal of Computer Vision.
Springer.
Black, M., Jepson, A., 1998. EigenTracking: Robust
Matching and Tracking of Articulated Objects Using a
View-Based Representation. International Journal of
Computer Vision. Springer.
Morimoto, C., Koons, D., Amir, A., Flickner M., 1998.
Pupil detection and tracking using multiple light
sources. Technical Report RJ-10117, IBM Almaden
Research Center.
Morimoto, C., Koons, D., Amir, A., Flickner M., 1998.
Real-time detection of eyes and faces. In PUI’98
International Workshop on Perceptual User
Interfaces. ACM Press.
COMPETITIVE AND COOPERATIVE SOLUTIONS FOR REMOTE EYE-TRACKING
527

Morimoto, C., Mimica, M., 2005. Eye gaze tracking
techniques for interactive applications. Computer
Vision and Image Understanding. Elsevier Inc.
Zhu, Z., Ji, Q., 2005. Robust real-time eye detection and
tracking under variable lighting conditions and various
face orientations. Computer Vision and Image
Understanding. Elsevier Inc.
Jacob, R., 1991. The use of eye movements in human-
computer interaction techniques: What you look at is
what you get. ACM Transactions on Information
Systems. ACM Press.
Shi, J., Tomasi, C., 1994. Good features to track. In
CVPR’94, International Conference on Computer
Vision And Pattern Recognition. IEEE Computer
Science Society.
Ramadan, S., Almageed, W., Smith, C., 2002. Eye
tracking using active deformable models. In
ICVGIP’02, Indian Conference on Computer Vision,
Graphics and Image Processing. Springer.
Kawato, S., Tetsutani, N., 2002. Real-time detection of
between-the-eyes with a circle frequency filter. In
ACCV’02, Asian Conference on Computer Vision.
Springer.
Kawato, S., Tetsutani, N., 2002. Detection and tracking of
eyes for gaze-camera control. In VI’02 International.
Conference on Vision Interface. Springer.
Canny, J., 1986. A Computational Approach to Edge
Detection, Transactions on Pattern Analysis and
Machine Intellegence. IEEE Computer Science
Society.
Bouguet, J., 1999. Pyramidal Implementation of the Lucas
Kanade Feature Tracker. Intel Corporation
Microprocessor Research Labs.
Daugman, J., 1993. High confidence visual recognition of
persons by a test of statistical independence.
Transactions on Pattern Analysis and Machine
Intellegence. IEEE Computer Science Society.
Haro, A., Flickner, M., Essa, I, 2000. Detecting and
tracking eyes by using their physiological properties,
dynamics, and appearance. In CVPR’00, International
Conference on Computer Vision And Pattern
Recognition. IEEE Computer Science Society.
Peng, K., Chen, L., Ruan, S., Kukharev, G., 2005. A
Robust Algorithm for Eye Detection on Gray Intensity
Face without Spectacles. Journal of Computer Science
& Technology. Springer.
Vester-Christensen, M., Leimberg, D., Ersbøll, B.,
Hansen, L., 2005. Heuristics For Speeding Up Gaze
Estimation. In SSBA’05, Svenska Symposium i
Bildanalys.
Li, D., Babcock, J., Parkhurst, D., 2006. OpenEyes: A
low-cost head-mounted eye-tracking solution. In
ETRA’06, International Symposium on Eye Tracking
Research and Applications. ACM Press.
Li, D., Winfield, D., Parkhurst, D., 2005. Starburst: A
Hybrid Algorithm For Video-Based Eye Tracking
Combining Feature-Based And Model-Based
Approaches. In CVPR’05, International Conference
on Computer Vision And Pattern Recognition. IEEE
Computer Science Society.
Matsumoto, Y., Zelinsky., A., 2000. An algorithm for real-
time stereo vision implementation of head pose and
gaze direction measurement. In AFGR’00,
International Conference on Automatic Face and
Gesture Recognition. IEEE Computer Science Society.
King, I., Xu, L., 1997. Localized Principal Component
Analysis Learning for Face Feature Extraction and
Recognition. Workshop on 3D Computer Vision.
Chinese University of Hong Kong.
BIOSIGNALS 2009 - International Conference on Bio-inspired Systems and Signal Processing
528
