
SYROTEK
On an e-Learning System for Mobile Robotics and Artificial Intelligence
Miroslav Kulich, Jan Faigl, Karel Ko
ˇ
snar, Libor P
ˇ
reu
ˇ
cil
Department of Cybernetics, Faculty of Electrical Engineering, Czech Technical University in Prague, Czech Republic
Jan Chudoba
Center of Applied Cybernetics, Faculty of Electrical Engineering, Czech Technical University in Prague, Czech Republic
Keywords:
e-Learning, Mobile robotics, Collective robotics.
Abstract:
The paper deals with motivations and design leading to succeeding development of a system for remote learn-
ing of mobile robotics topics. Specifically, the designed SyRoTek system comprises a team of 12 tele-operated
mobile robots acting in 24/7 maintenance-free environment equipped with charging docks and reconfigurable
system of obstacles, all being observable and accessible via Internet. The SyRoTek system together with an
attached e-learning environment it is aimed to provide the features real data gathering and real robot motion
execution. The whole set-up is targeted on training purposes in basic and advanced courses in the field of
Intelligent and Mobile Robotics and Collective Robotics as well as for test/verification purposes in a research
domain.
1 INTRODUCTION
Robotics and autonomous systems have become an
inseparable part of up-to-date IT solutions. As be-
ing applied more and more frequently in these days,
need of training activities for these demanding tech-
nologies steadily raises. This situation forms condi-
tions and requirements how to approach and optimize
the training issue, respecting the nature of the robotics
systems in question.
Autonomous robotics systems typically require
applications of AI methods achieved through inde-
pendent processing of perceived information, un-
derstanding the environment, and followed by au-
tonomous reasoning and decision-making towards
a self-derived or given goal.
Autonomous (or intelligent) robotics in the first
place aims to design and develop systems with capa-
bilities to operate the robot device under uncertainty -
to handle unexpected situation or developments in the
operating space of the system, changes of constrains
of a task to be fulfilled, etc.
Moreover, as for a next level autonomy may be
considered a system comprising multiple robot sys-
tems, where each of these is introducing its’ own
intelligence into a coexisting or even a cooperating
team. The later concept leads to collective robotics
tasks, whereas performance of such the system may
substantially be improved through higher flexibility of
the robots team, via better resource planning and as-
signment, more reliable and optimized environment
sensing and other capabilities, which may be per-
formed faster, in more robust way, being best opti-
mized, and even sometimes done resolvable this way
at all.
As it can be seen, majority of the afore mentioned
tasks and their solutions are typically achieved on
conditions, that the robot provides capability of au-
tonomous processing of uncertain information, which
a real environment satisfies. The uncertainty itself
may be handled as a random process and there-
fore a simulation can be built up. Unfortunately,
none of feasible random processes allow us to cre-
ate an exhaustive simulator of real environments and
sensors. Although some widely used systems of-
fer a simulated environment and sensory simulations
(e.g. Player/Stage/Gazebo system (Gerkey et al.,
2003)), these do have a limited performance in certain
situations and remain efficient only in early stages of
an intelligent robot design and development phases.
Multiple experiences have shown, that precise
simulation of sensor behaviour is an extremely hard
275
Kulich M., Faigl J., Košnar K., P
ˇ
reu
ˇ
cil L. and Chudoba J. (2009).
SYROTEK - On an e-Learning System for Mobile Robotics and Artificial Intelligence.
In Proceedings of the International Conference on Agents and Artificial Intelligence, pages 275-280
DOI: 10.5220/0001663102750280
Copyright
c
SciTePress

task, which remains unsolvable very often. There-
fore, existence of real senses, as sensory measure-
ments from real environments can not ever be fully
substituted by simulation.
The preceding finding leads to the idea, that re-
search/development as well as teaching activities in
the field of intelligent robotics can be performed on
high quality level only and only if a real experimental
platform is made available. This comprises mainly
availability of real sensors being operated in real-
world environments and providing realistic data. To
move, orient and position the sensor in the environ-
ment a suitable carrier (mobile platform or actuator)
is needed. Integrating both the previous issues to-
gether and adding some control algorithms we ob-
tain a mobile robot, whereas the crucial control part
(the data processing algorithms, reasoning and plan-
ning) can be executed either on-board such platform
or off-board in an attached or remote computer. Hav-
ing multiple such sensor platforms with some neces-
sary control infrastructure (observation and caretak-
ing system) we achieve a multi-robot system, which
can be made ready either for local or remote con-
trol via Internet. As this setup is truly teleoperated,
it can effectively create an experimental part of an e-
learning system for the intelligent mobile robotics as
well as collective robotics domains.
In this paper we present the SyRoTek system -
a system for distance robotic learning which will al-
low its remote users to get acquainted with algorithms
from areas of modern mobile and collective robotics,
artificial intelligence, control, and many other related
domains. Advanced users will be able to develop own
algorithms and monitor behaviour of these algorithms
on-line during real experiments.
SyRoTek mobile robots move inside a restricted
area, which contains other elements like obstacles or
objects related to objectives of the actually solved
task. Moreover, several sensors (infrared, sonars,
cameras, etc.) are used to gather information about
the actual status of the play field and particular objects
on it. Some sensors are placed on-board the robots,
while others are stand-alone getting global overview
of the play field status. The user will be able not only
to observe gathered data using Internet interface, but
also control the robots in real-time. Unlike existing
e-learning robotic systems developed in the world in
which the user can only tele-operate robots, behaviour
of the robots in the SyRoTek system can be modified,
since the system allows to run own algorithms devel-
oped by the user.
The remainder of the paper is structured as fol-
lows. The next section gives a brief overview of exist-
ing robotic systems for e-learning. In section 3, main
ideas and architecture of the SyRoTek system are pre-
sented. Robots developed and play-field are described
in section 4 and 5 respectively. Finally, typical assign-
ments solvable by the system are briefly introduced in
section 6.
2 RELATED WORK
The SyRoTek project is focused on building a system
for distance learning. Many systems for remote robot
control as well as systems for e-learning were imple-
mented during last decades.
First robotic projects enabling their users to share
and control robots via Internet dealt with a single tele-
operated robots. Many of these robots were operating
many years so knowledge gathered during these years
allows creating more advanced e-learning solutions.
One of the first robots controlled at distance and
available to public was Telegarden (Telegarden, 2008)
developed at University of Southern California. It has
been running since 1995 with 9000 users registered
to the system in first month of operation. Telegarden
has a mechanism which informs its users about actual
state of the system, and planned drop-outs. More-
over, the users can interact with each other via fo-
rum. Number of contributions in the forum shows
that space for exchange experience among users is
an inseparable part of an arbitrary e-learning sys-
tem (see analysis in (Kahn et al., 2005)). Users cre-
ate their own community, manuals, documentation,
tips&tricks which play an important role for collec-
tive solving of problems.
Other system worth to mention is Bradford
Robotic Telescope operated at University of Bradford
(Telescope, 2008). The telescope is a part of an e-
learning course of which goal is to popularize astron-
omy. In addition to open up a unique equipment to
a broad public, the many research programs use tele-
scope for research of galaxies, supernovas, and black
holes. The system thus combines basic research with
education by sharing limited sources.
Project RHINO (Rhino, 2008) combines tele-
operation with visualization. Robot RHINO
(a robotic guide in a museum) is able to operate in
two diverse modes. In the first one, the robot guides
visitors which can interact with the robot and influ-
ence the tour. The second mode allows Internet users
to control the robot and to view the museum at dis-
tance. Although main research goal of the project is
to build an autonomous robots with cognitive func-
tions education aspect plays an important role in both
modes.
Robot Xavier (Simmons et al., 2000) developed at
ICAART 2009 - International Conference on Agents and Artificial Intelligence
276
Carnegie Mellon University is an autonomous robot
operating in indoor environments of university hall-
ways. Robot autonomy allows users to enter high-
level tasks (e.g. go to a specified position), which
are performed by the robot autonomously. After the
task is done, an e-mail with a photo of target place is
sent to the user. Concerning e-learning, an important
part of the project was web interface designed with
respect to deal with limited connection speed. The
authors also discuss aspects related to operation time
of robots. If the system should operate 24 hours/day
and 7 days/week then battery capacity, their charging
and other hardware and software services must be de-
signed with special attention.
Robotoy (Robotoy, 2008) - a robotic arm with
a gripper - developed at University of Wollongong al-
lows it users to control it via web interface. The user
can choose between two cameras from which it can
see robot’s working environment. Although the sys-
tem is relatively simple, it contains all basic compo-
nents of successful distant control. The robot is con-
trolled in command regime, i.e. the user enters a com-
mand which is immediately fulfilled.
A notable part of such system is a simulator which
introduces the robot to the user and allows the user
to test robot’s behaviour and its responses to user’s
commands off- line.
One of the most complex robotic e-learning lab-
oratories was developed at Swiss Federal Institute
of Technology in Lausanne (EPFL). The RobOn-
Web project (Siegwart and Sauc, 1999) is focused
on advanced robotic users. The authors define five
fundamental services of web interface: chat, video,
robot control, virtual robot representation, and log-
ging. Moreover, an user registration system is intro-
duced, which manages user’s access to robotic hard-
ware. Several configurations are parts of the project
varying mainly in used robot platform and sensors:
TeleRoboLab, AliceOnWeb, Koala on the Web, and
Pygmalion on the Web. TeleRoboLab is for example
an environment monitored with several cameras, in-
dependent global localization system, Koala robots,
and other controlled devices (movable doors, lights,
etc.). Play-field in AliceOnWeb is realized as a small
city with houses, streets, crossroads, and squares.
Robots called Koala sized 22x21x20mm are localized
using a camera placed above the play field.
3 SYSTEM DESIGN
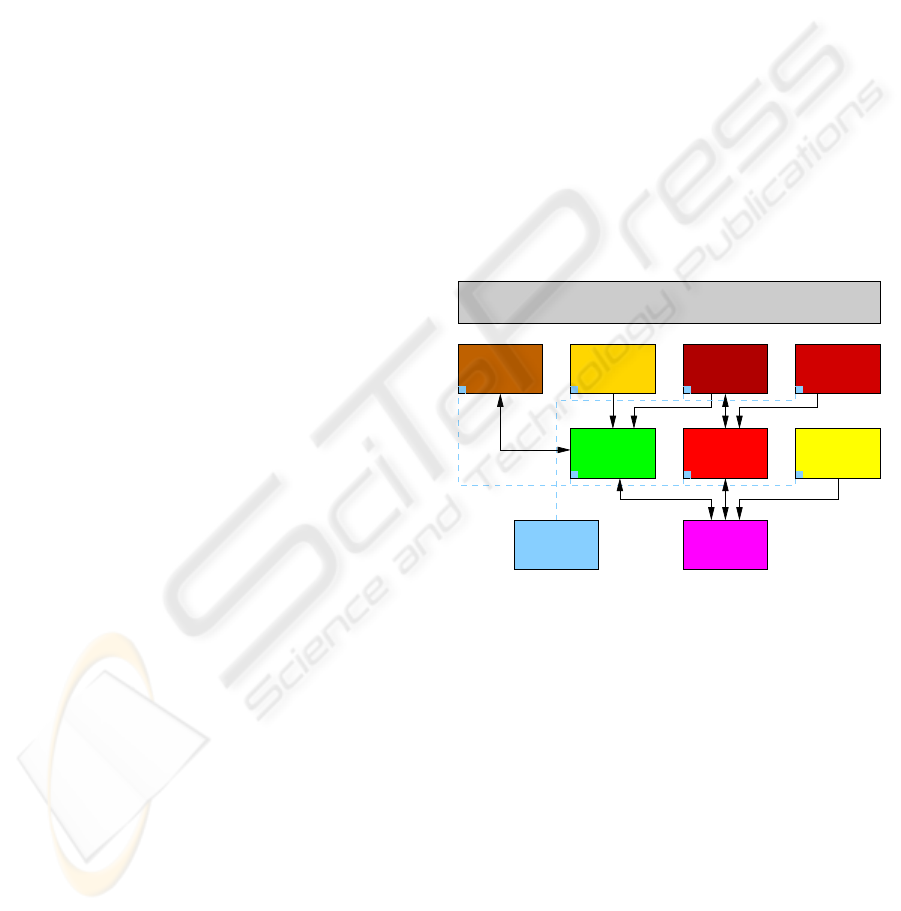
The SyRoTek system comprises of ten main com-
ponents (both software and hardware) which are de-
picted on figure 1, and which will be described in the
following paragraphs.
Majority of e-learning systems is oriented on
a distant user. Objects realizing interface with the
user can be therefore considered as a core of such sys-
tems. Web interface which is user’s front-end gate to
the system is one of these objects. User’s computer
represents user’s work space. The user has access
from its computer to web interface, learning materi-
als, he is able to observe situation on the play field,
send commands to control robots. The goal of Envi-
ronment visualization is to visualize actual play-filed
situation to the user. It is realized by a set of video
streams which are produced by cameras monitoring
the play field.
Learning materials as well as exercises for prac-
tical verification of acquired knowledge are insepara-
ble parts of each modern e-learning systems. With
respect to the process how this material is created and
maintained and to the fact that learning material is in-
dependent from existence of its web presentation, Ex-
ercises and instructions is a standalone object.
environment − arena
system
robots
sensors
localisation database
of users
tasks
tutorials
control
computer
web
interface
visuali−
sation
user’s
computer
services
Figure 1: General concept and main SyRoTek modules.
It is expected that a number of SyRoTek users will
be large and thus a system for user administration.
The aim of Database of users object is to manage in-
formation about SyRoTek users (their login data, sta-
tus of all exercises, actually solved experiment, sen-
sory data and visual streams from experiments, etc.).
Moreover, the object handles a booking system for
user’s access to play field, particular robots, sensors
and cameras.
The robots move in a defined space (play field)
called Arena. For successful pursuing of robotic
tasks, harmless robot control, navigation of a robot
to the docking station, obstacle avoidance, and for au-
tomatic evaluation of user’s solution of exercises it is
needed to determine positions of robots. Localization
is performed by the Localization object by processing
image from a camera located over the arena.
SYROTEK - On an e-Learning System for Mobile Robotics and Artificial Intelligence
277

Control computer provides user’s access to shared
SyRoTek hardware – it distributes sensor data to the
user and transmits control commands to the hardware.
It is not always possible or required to perform ex-
periments with real robots (during debugging, when
robots are already reserved by other users, etc.). Con-
trol computer therefore allows running the task in the
simulator. From user’s point of view, the simulator
works equally to the real system – the user can send
the same control commands and gets simulated sensor
data and video streams.
The SyRoTek system is designed to run in 24/7
regime. The aim of the Services object is to provide
functionality for distant administration of the system.
The object incorporates connections to other objects,
gathers information from them and creates log files
about all activities of currently connected user, and
statistics about system load. Moreover, the object is
responsible for backup of the system and its recovery
in case of failures.
4 ROBOTS
It is expected that no more than eight robots will op-
erate concurrently on the play field at the same time.
Moreover several (4-8) robots can be prepared in the
docking station which limits robot size to 18cm.
The robots are designed taking modular principles
into account, which allows flexible reconfiguration of
robots and placement of various sensors on them. The
modularity is taken into consideration in hardware
frame construction, electronic modules, even the soft-
ware design, while it is most significant is the sensor
replacement-ability. To typical sensors used belong:
incremental odometry, infrared distance sensors and
sonars. Extended configuration of the robot include
Hokuyo laser range-finder, accelerometers, compass,
internal/external thermometers, and cameras (CMU-
cam, see (CMUcam, 2008)).
Computational performance is provided mainly
by two computers: on-board computer (Gumstix
Verdex with XScale PXA270 processor, running RT
Linux operating system) and single-chip micropro-
cessor based control computer (processor Hitachi
H8S/2639). On-board computer provides a commu-
nication with the user and other SyRoTek objects and
executes user applications and top-level service func-
tions. Control computer is responsible for controlling
robot drive units, gathering and distribution of chas-
sis sensor data, computing odometry and provide ba-
sic robot movement functions (e.g. velocity control
or trajectory following). The engine current senses
are analyzed by the control computer, providing in-
Figure 2: A robot without a cover and sensors.
formation about higher force against the movement
direction, indicating possible collision with an obsta-
cle. Moreover, the robots are equipped with other pro-
cessors responsible for controlling sensors and mon-
itoring robot status (batteries, temperature,charging,
etc.)
Robots have two wireless communication chan-
nels used for different purposes. Wireless network
card (WiFi) mounted on the on-board computer is
used mainly for the program upload and maintenance.
Because the latency of the WiFi may not be sufficient
for the real-time control of the robot, radio channel
based on the Zigbee communication modules is used
for high-priority data whose latency is crucial, but
their volume is relatively low – control commands and
sensor data (except camera).
An uncovered robot without sensors is depicted on
figure 2.
5 ARENA
As mentioned above, Arena is the space, where the
robots perform their actions. There are antipodal de-
mands on arena size. The larger the play field the
more complex tasks can be solved, robots can move
more freely, more users can solve their assignments,
etc. On the other hand, for localization system based
on camera, it is needed to overview the whole Arena
– the larger the area, the higher the camera should be
placed and the higher resolution it has to have. More-
over, Arena has to be situated in current classrooms,
which also determines its size. As a compromise,
the size was chosen to approx. 350x380cm including
ICAART 2009 - International Conference on Agents and Artificial Intelligence
278
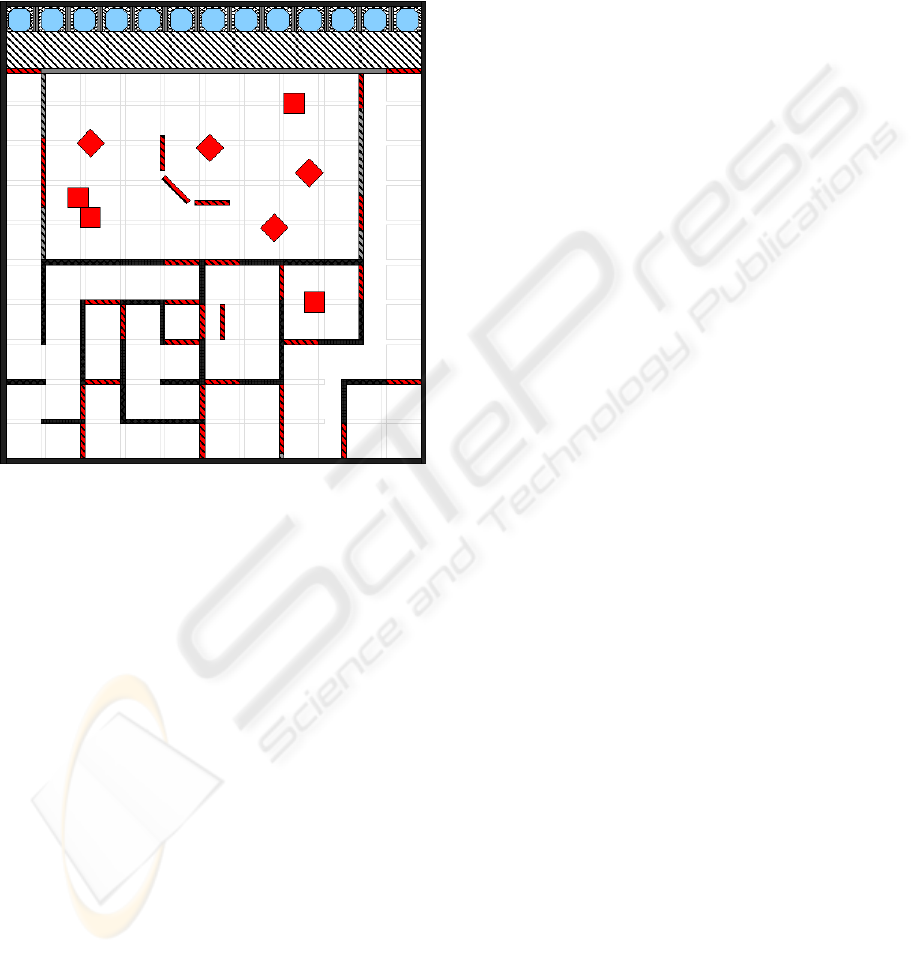
docking station (see fig. 3). It is expected, that obsta-
cles placed on Arena will be of two kinds. While fixed
obstacles are designed to be stationary during longer
periods of time (weeks), movable obstacle can change
their position by moving up and down (the obstacle
can have different heights or can totally coincide with
plane of Arena).
Figure 3: Design of the Arena. Movable (pop-up) obstacles
are highlighted with a red color. Docking boxes are placed
on the top (hatched area).
Robots that currently perform no assignment are
situated in docking boxes. This is an area separated
with barriers from the place where the robots nor-
mally solve their tasks.
6 ASSIGNMENTS
The system allows to solve and test a broad spectrum
of tasks. The important part of the system is therefore
a collection of assignments that users (students) can
solve with it. The assignments are sectioned into sev-
eral categories (courses) according to their difficulty,
domain, and dependencies to other assignments.
Students should be introduced to the system first,
so they go thru several simple demonstrations and ex-
ercises to become familiar with basic functionality
and features of the system. These exercises encom-
pass loading and running user’s code on the robot,
gathering sensor data, working with logging system,
etc.
Four introductory courses have been arranged in
order to afford students knowledge of fundamental al-
gorithms in key robotic domains. These are focused
on:
• Simple robot control (reactive, behavioural, tele-
operation, dead reckoning, etc.)
• ”classical” robot control (follow the carrot, pure
pursuit, vector pursuit, PID, motion models, etc. )
• Sensor processing and environment modelling
(continuous localization, Monte Carlo localiza-
tion, Kalman filters. occupancy grids, sensor
models, etc.)
• Path and motion planning (wall following, com-
binatorial planning, sampling-based planning, po-
tential fields, etc.)
• Communication, coordination, cooperation
Advanced courses are based on complex Top As-
signments (TA) that comprise from several fundamen-
tal problems mentioned above. These courses are
organized so that students learn all necessary funda-
mental algorithms (by solving corresponding assign-
ments) needed to solve TA of the course. TAs can be
divided into two groups: basic and advanced. Basic
Top Assignments are typical problems in robotics and
artificial intelligence, where solutions are well known
and described. To this class of problems belong for
example:
• Simultaneous Localization and Mapping
• Inspection, exploration, and coverage
• Pick & delivery
Each of these assignments can be solved with
a single robot or with a team of robots.
Advanced Top Assignments are problems whose
optimal or polynomial solution is not known. It is
therefore expected, that the student will either study
the literature to find some approximate solution or
it will creatively develop its own approach. Typical
examples of Advanced TAs are e.g. the following
games:
• Treasure hunt
• Pursuit-evasion
• Capture the flag
These problems are typically designed as multi-
robot, where cooperation and coordination of robots
plays an important role (although treasure hunt can
be performed by one robot).
Robot’s goal in Treasure Hunt is to locate a place,
where the treasure is and to navigate to this place. Ac-
cess to this place can be granted under specific con-
ditions that the robot must fulfill (e.g. finding a key,
opening door, etc.).
SYROTEK - On an e-Learning System for Mobile Robotics and Artificial Intelligence
279

Pursuit-evasion game is family of problems where
multiple robots (pursuers) collectively determine the
location of one or more other robots (evaders) and try
to catch them.
Capture the flag generalizes the previous problem.
The aim of each of two groups playing the game is
to find and capture the flag defended by the opponent
group. In other words, each group pursuits and evades
simultaneously.
Each of the aforementioned assignments can be
considered in different levels of difficulty determined
by the environment (e.g. static x dynamic, orthog-
onal, grid-like or general), whether the environment
is known, and abilities and equipment of opponents.
These specifications lead in most cases to totally dif-
ferent solutions which increase variability of possible
assignments.
SyRoTek system is designated to work also in
open mode for trusted users. This mode grants full
access to all features of the system and it is intended
especially for researches and phd students for devel-
opment and verifications of their algorithms.
7 CONCLUSIONS
While this paper is written the research is still in
progress. Due to this fact, the paper presents only first
results concerning system architecture, main ideas
and first results.
An exhausting study of current state of the art in
robotic e-learning was originated during previous pe-
riod. The study deals with teleoperation, software
technologies and frameworks, Internet and web in-
terfaces, hardware components, sensors, and mobile
robots that can be potentially used in the project.
Based on the study, overall design of the system was
sketched together with main its components and their
functionality. Moreover, SyRoTek robots were de-
signed and their functional prototype was built.
Activities for the next time concern mainly to final
design and production of 12 mobile robots, design and
implementation of fundamental software functional-
ity of robots an the control computer. Furthermore,
the assignments will be specified in more details, as
well as a concept of user’s access to the system will
be designed.
ACKNOWLEDGEMENTS
The presented work has been supported by the Min-
istry of Education of the Czech Republic under pro-
gram ”National research program II” by the project
2C06005. The support of the Ministry of Education
of the Czech Republic, under the Project No. 1M0567
to Jan Chudoba is also gratefully acknowledged.
REFERENCES
CMUcam (2008). http://www.cs.cmu.edu/∼cmucam.
Gerkey, B. P., Vaughan, R. T., and Howard, A. (2003).
The player/stage project: Tools for multi-robot and
distributed sensor systems. In In Proceedings of the
11th International Conference on Advanced Robotics,
pages 317–323.
Kahn, P. H., Friedman, B., Alexander, I. S., Freier, N. G.,
and Collett, S. L. (2005). The distant gardener: What
conversations in the telegarden reveal about human-
telerobotic interaction. In Proceedings of the 14th
International Workshop on Robot and Human Inter-
active Communication (RO-MAN ’05). Piscataway,
NJ,IEEE.
Rhino (2008). http://www.cs.uni-bonn.de/∼rhino/tour-
guide.
Robotoy (2008). http://robotoy.elec.uow.edu.au.
Saucy, P. and Mondada, F. (1998). Khepontheweb : One
year of access to a mobile robot on the internet. In
Proceedings of the 1998 IEEE/RSJ International Con-
ference on Intelligent Robots and Systems IROS 1998.
Piscataway, NJ, IEEE.
Siegwart, R. and Sauc, P. (May 1999). Interacting mo-
bile robots on the web. In Proceedings of the 1999
IEEE International Conference on Robotics and Au-
tomation.
Simmons, R., Fernandez, J. L., Goodwin, R., Koenig, S.,
and O’Sullivan, J. (2000). Lessons learned from
xavier. Robotics and Automation Magazine, pages 733
– 39.
Telegarden (2008). http://www.telegarden.org.
Telescope (2008). http://www.telescope.org.
ICAART 2009 - International Conference on Agents and Artificial Intelligence
280
