
COLOR FEATURES FOR VISION-BASED TRAFFIC SIGN
CANDIDATE DETECTION
Steffen G
¨
ormer, Anton Kummert
Faculty of Electrical Engineering and Media Technologies, University of Wuppertal, D-42119 Wuppertal, Germany
Stefan M
¨
uller-Schneiders
Delphi Electronics & Safety, D-42119 Wuppertal, Germany
Keywords:
Traffic sign detection, Color feature extraction, Color segmentation, Color analysis.
Abstract:
A common approach for traffic sign detection and recognition algorithms is to use shape based and in addition
color features. Especially to distinguish between speed-limit- and end-of-speed-limit-signs the usage of color
information can be helpful as the outer border of speed-signs is in a forceful red. In this paper the focus is
faced on color features of speed-limit and no-overtaking signs. The apparent color in the captured image is
varying very much due to illumination conditions, sign surface condition and viewing angle. Therefore the
color distribution in the HSV color space of a sufficient amount of signs at different illumination conditions
and aging has been collected, examined, and a matching mathematical model is developed to describe the
subregion in the according color space. Once the color region of traffic signs is known, two kinds of traffic
sign segmentation algorithms are developed and evaluated with the explicit focus only on color features to
preselect subregions in the image where (red bordered) traffic signs are likely to be.
1 INTRODUCTION
Together with Nightvision, Automatic Headlight
Control (AHC), Lane Departure Warning (LDW),
Adaptive Cruise Control (ACC) and Parking As-
sistance (PA) the Traffic Sign Recognition System
(TSR) is one of the main applications in vision-based
driver assistance systems. It keeps the driver informed
for instance about current speed limits, danger areas
and right-of-way directives. Navigation systems al-
ready provide information about speed-limits adapted
from a database which will not be absolutely up to
date concerning road works and temporary speed lim-
its. Especially variable traffic signs, upcoming more
and more to handle the different traffic conditions dur-
ing the day or dependent on the current weather con-
dition, must be reported just in time. To overcome this
issue, a vision based TSR-system is the proximate ap-
proach as a built-in camera for different applications
becomes apparent in future vehicles anyway and driv-
ing is, for the human as well, a task based almost com-
pletely on visual information processing.
Vision based TSR is divided into two main
approaches, based either on grayscale (Gavrila,
1999), (Barnes and Zelinsky, 2004) or color images
(Bahlmann et al., 2005), (Escalera et al., 2003), (Fang
et al., 2003), (Siogkas and Dermatas, 2006), (Torre-
sen et al., 2004). Of course a color image provides
additional information, but has also discredits due to
the variation of colors and illumination conditions
and requests more bandwidth, processing power and
memory. Johansson (Johansson, 2002) gives a good
overview on different approaches for either color- and
shape-based approaches. Priese et al. (Priese et al.,
1993), (Priese et al., 1994), (Priese and Rehrmann,
1998) developed the Color Structure Code to perform
color-segmentation for TSR purposes based on region
growing. Fleyeh (Fleyeh, 2006) introduces a seg-
mentation method for TSR comparing different color
spaces and figures out the advantages of the shadow
and highlight invariant HSV color model.
This paper gives an introduction into colorvision
followed by a detailed analysis of traffic sign color
properties. Based on an adequate number of signs
a color dataset is created by a labeling-tool to quan-
titatively evaluate the color distribution especially in
different illumination conditions. This distribution is
also modeled by the Covariance matrix to approxi-
mate the real world distribution. A segmentation al-
gorithm based on the Mahalanobis Distance is im-
107
Görmer S., Kummert A. and Müller-Schneiders S. (2009).
COLOR FEATURES FOR VISION-BASED TRAFFIC SIGN CANDIDATE DETECTION.
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications, pages 107-113
DOI: 10.5220/0001746101070113
Copyright
c
SciTePress

Figure 1: Principle of color perception: reflection and ab-
sorption.
plemented. At the end the performance is compared
to the approach of simple thresholding presented e.g.
by Fleyeh (Fleyeh, 2006) with adapted thresholds ac-
cording to the results of the color distribution analy-
sis.
2 COLORVISION
The human idea of color is nothing more than a sen-
sory perception. Based on the human eye design with
its red-, green- and blue-sensitive receptors the human
brain processes an impression containing information
about the intensity, the saturation and the coloring of
the incoming light. The perception of color is gener-
ally due to the spectrum of a light source as well as to
the properties of the object reflecting it and of course
dependent on the sensor. The spectrum of a source
shows the emitted intensities dependent on the spe-
cific wavelength. Most light-sources emit many dif-
ferent wavelengths with approximately equal intensi-
ties which causes the perceived color to be white. An
object can reflect at most the whole spectrum of the
involved light source, in case it is no mirror it will ac-
tually absorb certain wavelengths and transmit and/or
reflect the rest. So what we see if we call an ob-
ject colored is a reflected part of the original source
spectrum (for more details see (Gonzales and Woods,
2002), (Shevell, 2003)). Thus, one can conclude that
the perception of color is very dependent on the inci-
dent illumination. An object will only be considered
to be red, if on the one hand the illumination contains
the red spectrum and on the other hand the green and
blue part of the spectrum is absorbed or transmitted
(see figure 1).
As RGB is the standard color-model in computer
vision and all capture devices normally deliver frames
in that color pattern it is easily accessible and easy
to handle. But as expected the investigations from
Fleyeh (Fleyeh, 2006) show that each component R,
G and B are dependent on the sensor response, sur-
face albedo, illumination intensity, surface orientation
and illumination direction. This is a difficult issue
for color segmentation because changing illumination
conditions like shadows and highlights can involve
a vast deviation of the RGB-data affecting all three
channels.
As mentioned above the human brain creates an
impression of coloring, saturation and intensity. The
HSV color space corresponds to that, characteriz-
ing a color by hue (H), saturation (S) and intensity
(V=value). The hue-component is an angle and rep-
resents the dominant wavelength. It describes a color-
circle starting from red (0
◦
) to yellow (60
◦
), green
(120
◦
), cyan (180
◦
), blue (240
◦
), magenta (300
◦
) and
back to red (360
◦
/0
◦
) again. Therefore this color
space is represented in cylindrical coordinates, illus-
trated in figure 2. Saturation can be found as the ra-
dius, intensity is the height or z-component. The neu-
tral axis (gray-scales) in this color space is the cen-
terline of the cylinder, where saturation is very low or
zero and hue is insignificant.
The transformation from 24-bit RGB to 24-bit
HSV color space is done with the following equa-
tions:
V = MAX (1)
S =
V −MIN
V
·255 (2)
H =
0 +
G −B
MAX −MIN
·
60
◦
2
for R = MAX (3)
H =
2 +
B −R
MAX −MIN
·
60
◦
2
for G = MAX (4)
H =
4 +
R −G
MAX −MIN
·
60
◦
2
for B = MAX (5)
with
MAX = max(R,G,B) (6)
MIN = min(R, G, B) (7)
Complying to the 3×8-Bit storage model of common
color images (e.g. 24-bit bitmap) saturation and in-
tensity have a range of {0. . . 255}, similar to RGB-
channels. The hue-component is divided by two to fit
Figure 2: HSV represented by a cylinder (angle: H, radius:
S, height: V).
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
108
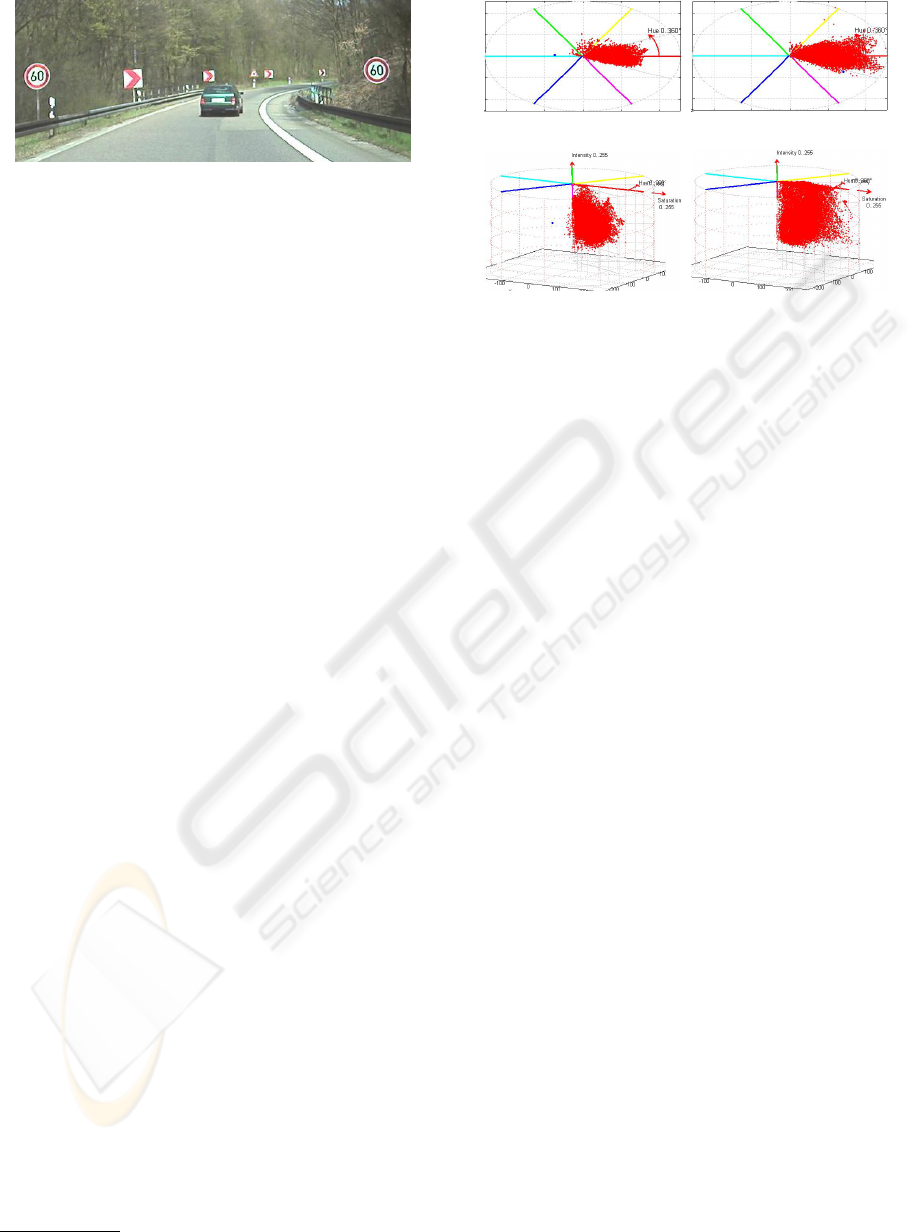
Figure 3: Sample image from a captured sequence contain-
ing a traffic sign (originally VGA 640×480).
into 8 Bits and thus has a range of {0. . . 180} instead
of {0. . . 360}.
3 COLOR ANALYSIS
3.1 Traffic Sign Color Properties
Traffic signs are very important to inform drivers
about prohibitions, commandments and dangers.
Therefore they are designed in a very distinct way.
Europe-wide, speed signs are circular in shape, the
base color is white and the outer circle is painted in
a bright signal red which is well silhouetted against
the natural environment. In Germany this red tint is
specified in the norm DIN 5381 and has the RAL-
number 3001. This is a pure denotation for printing
purpose and does not help very much for color seg-
mentation tasks as the actually perceived color by the
camera is dependent on so many factors. But there
are some color transformation tables which give es-
timated RGB-values for the colors according to the
RAL-standard in printing technology. RAL 3001
hence corresponds to the RGB-components {158
1
,
21
1
, 25
1
}. The related HSV-parameters are {−1.75
◦
,
221
1
, 158
1
}. So these results would be expected cap-
turing a brand new sign with a photometric color cam-
era under well defined standard illumination condi-
tions. Unfortunately this is very different in outdoor
scenes. The color also deteriorates over time towards
a bleached orange because of weather influences and
UV-rays treating the sign surface.
3.2 Database for Investigation Purpose
To investigate all these issues a database of captured
signs and their color attributes is necessary. There-
fore a set of sequences is captured with a VGA high
dynamic range automotive camera mounted on the
windshield. Each sequence is saved as 24 Bit raw-
data in an AVI file-container (see figure 3). Indi-
vidual frames containing traffic signs are extracted
1
in the Range of {0. . . 255}
(a) Cloudy (top view) (b) Sunny (top view)
(c) Cloudy (side view) (d) Sunny (side view)
Figure 4: Color distribution at different weather conditions
in HSV color space.
from the sequences and saved as bitmaps to analyze
their color property. To extract a desired area with
similar color in an image an extraction tool is devel-
oped. Therewith the red border of traffic signs can be
marked and cut out. A region-growing algorithm is
the key to this feature. The extracted region in RGB-
coordinates is transformed into the HSV color space
and all pixel-values are written into a txt-file. Some
lines of gnuplot-commands are added to the data-files
to display the data-set. Equipped with this applica-
tory feature different illumination conditions can be
compared easily.
3.3 Analysis
The weather condition plays a significant role con-
cerning the color appearance. With the shining sun
the saturation is increasing as well as the intensity of
course, whereas the opposite happens on cloudy days.
In very rainy conditions the illumination is deteriorat-
ing and the color-information in the image is percep-
tible decreasing. Figure 4 shows the red-spectrum in
the HSV color space at different weather conditions.
Each dataset contains about 90000 pixels (∼200 traf-
fic signs). Few individual points far outside the ex-
pected region of color-values are due to inaccurate la-
beling and do not really belong to a traffic sign but
maybe to its immediate environment.
To be able to make a statement on the actual
changing of color-behavior under different weather
conditions it is reasonable to have also a look on the
average color-values of each data-set.
Table 1 shows the relations. The hue-value repre-
senting the most important feature does not vary too
much (see figure 4). Of course saturation increases at
sunny weather but the change in intensity is low and
insignificant anyway. The sign color tends towards a
COLOR FEATURES FOR VISION-BASED TRAFFIC SIGN CANDIDATE DETECTION
109

darker red/violett viewing against the sun (figure 5(a))
and on the contrary into a slight orange with the sun
in the back (figure 5(b)).
In cloudy weather conditions there are minor dif-
ferences. The colors are in a closer range due to the
more or less constant illumination condition. Rainy
scenes correspond to cloudy weather. There is not
so much difference beside the decreasing intensity or
sporadic distortions by raindrops within the image.
Table 1: Average values for different weather conditions.
hue saturation value
cloudy −1
◦
75
1
145
1
sunny 0
◦
102
1
166
1
(a) View against the sun (b) Sun in the back
(c) Twilight (d) Night
Figure 5: Traffic sign appearance at different weather con-
ditions and daytime.
Without doubt the trait of sunlight changes during the
day ((B
´
enallal and Meunier, 2003)). But due to con-
stantly changing lighting conditions (changing image-
background, e.g. forest, sky), the continuous auto-
matic adjustment of the camera and the very differ-
ent appearances of traffic signs, the variation of sun-
light is negligible. At twilight and at night traffic sign
colors appear almost equal in both conditions if not
completely distorted by overexposure (highbeam re-
flectance) or motion blur (see figure 5(c) and 5(d)).
Saturation and intensity are quite low of course and
there is a drift towards dark violet as experienced with
direct sunlight. Also in most cases the sensitivity
of the sensor was too low to obtain suitable color-
informations out of the image.
4 MODELING OF COLOR-DATA
BY COVARIANCE MATRIX
Obviously the traffic sign colors form clouds around
its average. These clouds can be approximated by
an ellipsoid, which is defined by the Mahalanobis-
Distance γ from the average center point~µ.
γ = (
~
hsv −~µ)
T
·(Cov(H,S,V ))
−1
·(
~
hsv −~µ) (8)
The Mahalanobis-Distance is dependent on the orien-
tation and describes the size of the ellipsoid and the
amount of color-values of traffic signs to be included.
It corresponds to the radius in a sphere. The orienta-
tion dependency which forms the ellipsoid is due to
the covariance matrix (abbrev. Cov).
Cov(H, S ,V ) =
1
N
·
N
∑
i=0
(
~
hsv
i
−~µ)·(
~
hsv
i
−~µ)
T
(9)
with
~
hsv
i
= (H
i
,S
i
,V
i
)
T
(values of pixel i) (10)
and
~µ =
1
N
·
N
∑
i=1
~
hsv
i
=
µ
H
µ
S
µ
V
(average) (11)
where N is the number of pixels collected in the data-
set. As the ellipsoid is a special case of a sphere, it can
be derived from that. A sphere is defined as follows:
~u
T
·~u = γ (12)
with
~u =
√
γ·
sinϑ· sin ϕ
sinϑ· cos ϕ
cosϑ
where
0 ≤ ϑ ≤ π
0 ≤ ϕ ≤ 2π
(13)
So equation 8 has to be adapted to 12. Therefore
the covariance matrix is split up by the Cholesky-
Decomposition:
Cov
−1
=
√
Cov
−1
T
·
√
Cov
−1
(14)
The deviation from the average is substituted by~v:
~v =
~
hsv −~µ (15)
γ = (
~
hsv −~µ)
T
·(Cov(H,S,V ))
−1
·(
~
hsv −~µ) = (16)
=~v
T
·
√
Cov
−1
T
·
√
Cov
−1
·~v (17)
equating 12 and 16:
~u =~v ·
√
Cov
−1
(18)
Finally, the ellipsoid in the HSV color space is speci-
fied as follows:
H
S
V
= (
√
Cov
−1
)
−1
·
√
γ·
sinϑ· sin ϕ
sinϑ· cos ϕ
cosϑ
+~µ
(19)
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
110
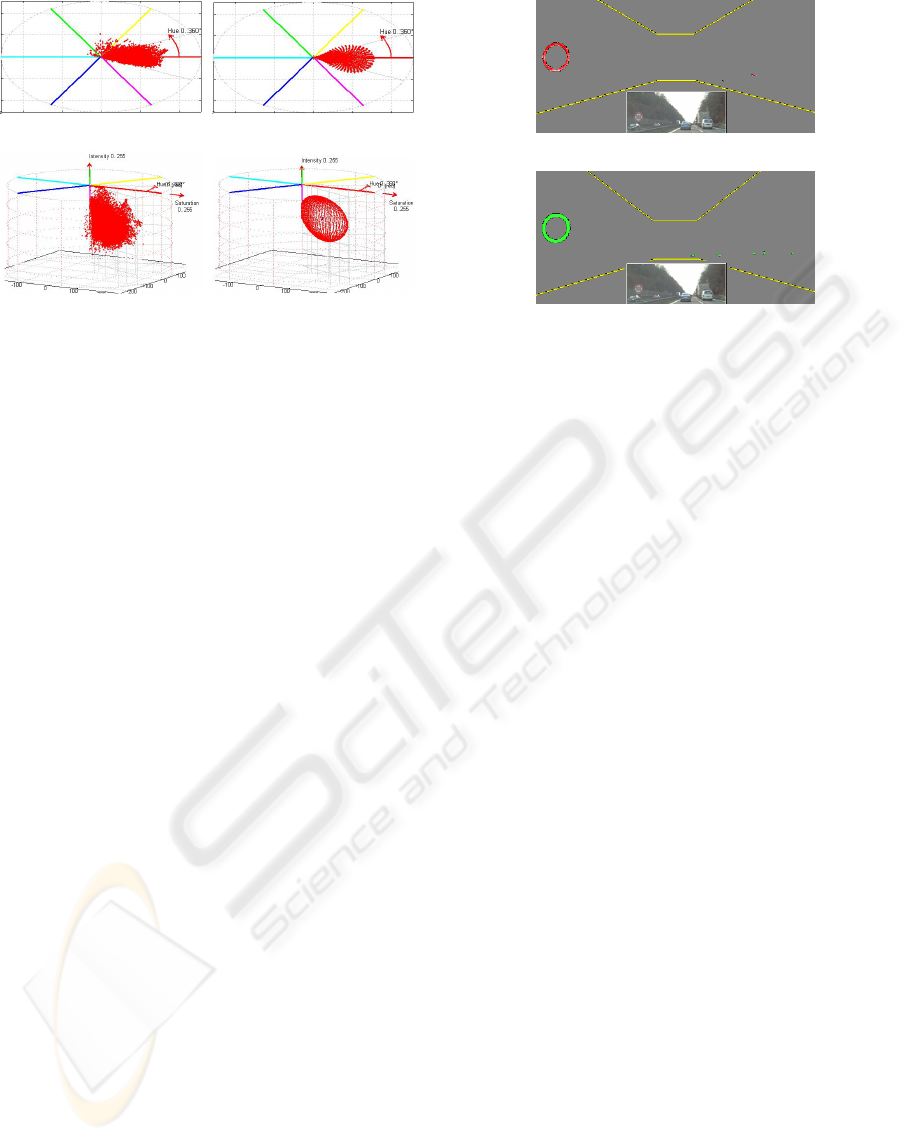
(a) (b)
(c) (d)
Figure 6: Color distribution and the corresponding covari-
ance ellipsoid.
with
0 ≤ ϑ ≤ π ∧ 0 ≤ϕ ≤2π (20)
In figure 6 a comparison between the real color dis-
tribution and the modeled covariance ellipsis with a
Mahalanobis-Distance of γ = 7 is shown.
5 IMPLEMENTATION OF A
SEGMENTATION ALGORITHM
Now that the facts about the appearance of traffic
signs are pointed out, different segmentation methods
are investigated. As traffic signs should only appear
in a certain region in the image (at the border of the
road), a region of interest (ROI) is defined to narrow
down the image processing task. The OpenCV-library
supplies very useful functions to handle images and
access individual pixels. Easy capturing of frames
from a camera adapted to the video-for-windows in-
terface is embedded as well as grabbing them from
an existing AVI-file. So the captured sequences can
be used as input for testing purpose. Since the HSV
color space is the most promising approach due to
comparative illumination independence, evaluation is
presented in this matter. Of course it would be appli-
cable in the other color spaces as well.
The first step is to convert the grabbed image into
the HSV space. This is done with the transformation
equations (1) to (7). Now two segmentation methods
are considered. On the one hand the segmentation can
be based on the Mahalanobis Distance as shown in 4,
on the other hand a simple thresholding can be ap-
plied by cutting out a subspace in the shape of a slice
of pie.
(a) Mahalanobis Distance (γ = 1)
(b) Simple thresholding
Figure 7: Segmented image with different methods.
5.1 Mahalanobis Distance
As the traffic sign color-data can be approximated
by the according covariance matrix and Mahalanobis
Distance, this method can also be used for segmenta-
tion purpose. The covariance of a training data set can
be calculated and printed into a text-file together with
the average value. This text-file is loaded into the seg-
mentation algorithm and the inverse of the covariance
matrix is calculated. Therewith the Mahalanobis Dis-
tance can be processed for each pixel of an image ac-
cording to equation (8). All pixels within a certain γ-
range from the average are segmented. This approach
allows highlighting the segmented pixels with differ-
ent weighing so that closer color-values are displayed
in darker red and colors being further away from the
average in a lighter red (see figure 7(a)).
5.2 Thresholding
Vitabile et al. (Vitabile et al., 2002) defined three sub-
spaces in the HSV color space:
• achromatic area with S ≤60 ∨ V ≤ 50
• unstable area with 60 ≤ S ≤ 130 ∧ V ≥ 50
• chromatic area with S ≥130 ∧ V ≥ 50
The achromatic area must be factored out in color seg-
mentation tasks as the hue-value is very unstable and
the color has no dominant wavelength. In other words
it is even visually gray-scale. Of course the boundary
values are closely dependent on the capture device. In
this case a minimum saturation of S = 50 has proved
to be still suitable. So in segmentation process all pix-
els are cut out which do not comply with the following
constraint:
−25
◦
≤ H ≤ +25
◦
∧ S ≥ 50 ∧ V ≥ 50 (21)
COLOR FEATURES FOR VISION-BASED TRAFFIC SIGN CANDIDATE DETECTION
111

All other pixels considered to be red are highlighted
in green. The result can be seen in figure 7(b).
6 EVALUATION
AND COMPARISON
To get an impression which method is superior both
are tested with specially selected individual frames
which are taken out of the whole captured data and
include all kinds of conditions. These frames are
labeled by hand to mark the red traffic sign areas
which should be segmented by the algorithm to create
Ground Truth. Now these frames are segmented with
both Mahalanobis Distance and simple thresholding
and compared to the hand-labeled images. The num-
ber of correctly segmented pixels is called True Pos-
itives (TP). The number of missed pixels is assigned
as False Negatives (TN). Pixels which are segmented
but do not belong to a traffic sign are False Positives
(FP). All other pixels not belonging to a sign and not
segmented by the algorithm are True Negatives (TN)
(see (Lazarevic-McManus et al., 2006)).
Table 2: Evaluation scheme.
Ground Truth
sign non-sign
segm. sign TP FP FPR
result non-sign FN TN
DTR
In table 2 this is shown visually for a better under-
standing. The interesting results giving an impression
how good the segmentation algorithm works is on the
one hand the detection rate (DTR) and on the other
hand the percentage of false positives (FPR) with:
DT R =
T P
T P + FN
and FPR =
FP
T P + FP
(22)
One may not forget to see that the detection-rate refers
to the number of pixels which are recognized, not
on the actual number of traffic signs. A detection-
rate of 80% means that 80% of all pixels belonging
to a traffic sign are recognized which is completely
enough for further processing. The 20% missed pix-
els are usually dispersed over the very border of the
sign where color is deteriorating.
Table 3 shows the difference between the two pre-
sented methods. Of course the simple thresholding
algorithm delivers a high percentage of all sign pixels
due to a wide range of color-values covered. But that
comes along with a relatively high false-positive rate
(FPR). As the Covariance matrix describes the distri-
bution of the sign pixels in the training data set much
better, the FPR is decreasing. However the detection-
rate is comparably low due to many traffic sign pixels
deteriorating in sunny conditions as mentioned in sec-
tion 3.3.
Table 3: Performance evaluation results.
segmentation results (HSV color space)
segmentation DTR FPR
simple thresholding 83.2% 78.9%
Mahalanobis Distance 51.0% 48.4%
Limited to cloudy scenes only the results would be
different. Of course the γ-range can be increased to
catch more sign pixels, anyhow this leads to a defined
color subregion very similar to the section of the sim-
ple thresholding method as the modeled elliptically
shaped subregion exceeds the color space limits and,
within the color space, forms a body very alike the
slice of pie.
7 CONCLUSIONS AND FUTURE
WORKS
A preselection of subregions in the image contain-
ing traffic signs combined with an a-priori region of
interest is a very effective approach to lower down
processing time and hardware requirements for traf-
fic sign recognition. In this paper the main issues
about color features and how traffic signs in the real
world look alike for a color imager were examined.
The modeled color distribution proved to be a good
approximation in cloudy and therefore consistent il-
lumination conditions. Autumn leaves in the environ-
ment showed to be the hardest challenge to separate
them from sign pixels as they partially reside in the
same color subregion as traffic signs. Considered all
illumination conditions, the higher processing costs
for the Mahalanobis Distance of each pixel in the re-
gion of interest and the achieved detection rate a color
based sign detection system can rely on the simple
thresholding algorithm for an initial candidate detec-
tion. The larger amount of false positives can be tack-
led with further processing steps like gaussian filter-
ing and tracking over several frames, as false positives
usually do not appear similarly in every frame. Any-
how the lower sensitivity of color imagers compared
to greyscale cameras, which is due to the RGB color
filters on the imager chip, is still a limiting factor for
the usage of color information at nighttime.
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
112

REFERENCES
Gavrila, D.M. (1999). ”Traffic Sign Recognition Revisited”.
In: Proc. of the 21st DAGM Symposium f
¨
ur Muster-
erkennung, pp. 86-93, Bonn, Germany
Barnes, N., Zelinsky, A. (2004). ”Real-time Radial Sym-
metry for Speed Sign Detection”. In: IEEE Proc. of
the Intelligent Vehicles Symposium 04, pp. 566-571,
Parma, Italy
Bahlmann, C., Zhu, Y., Ramesh, V., Pellkofer, M., Koehler,
T. (2005). ”A System for Traffic Sign Detection,
Tracking, and Recognition Using Color, Shape, and
Motion Information”. In: IEEE Proc. of the Intelligent
Vehicles Symposium 05, pp. 255-260
de la Escalera, A., Armingol, J., Mata, M. (2003). ”Traffic
sign recognition and analysis for intelligent vehicles”.
In: Image and Vision Comput. Vol. 21, pp. 247–258
Fang, C., Chen, S., Fuh, C. (2003). ”Road-sign detection
and tracking”, In: IEEE Transactions on Vehicular
Technology vol. 52, No. 5, pp. 1329–1341
Siogkas, G. K., Dermatas, E. S. (2006). ”Detection, Track-
ing and Classification of Road Signs in Adverse Con-
ditions”. In: IEEE MELECON 2006, Malaga, Spain
Torresen, J., Bakke, J. W., Sekanina, L. (2004). ”Efficient
Recognition of Speed Limit Signs”. In: IEEE Intelli-
gent Transportation Systems Conference, Washington
D.C., USA.
Johansson, B. (2002) ”Road Sign Recognition from a Mov-
ing Vehicle”. Master’s Thesis Report No. 56, Univer-
sity of Uppsala, Sweden
Priese, L., Rehrmann, V., Schian, R., Lakmann, R. (1993).
”Traffic Sign Recognition Based on Color Image
Evaluation”. In: IEEE Proc. of the Intelligent Vehicles
Symposium, pp. 95–100
Priese, L., Klieber, J., Lakmann, R., Rehrmann, V., Schian,
R. (1994). ”New Results on Traffic Sign Recogni-
tion”. In: IEEE Proc. of the Intelligent Vehicles Sym-
posium, pp. 249–254, Paris
Priese, L., Rehrmann, V. (1998). ”Fast and Robust Segmen-
tation of Natural Color Scenes”. In: 3rd Asian Con-
ference on Computer Vision, pp. 598–606
Fleyeh, H. (2006). ”Shadow And Highlight Invariant Colour
Segmentation For Traffic Signs”. In: IEEE Conf. on
Cybernetics and Intelligent Systems, Thailand
Gonzales, R. C., Woods, R. E. (2002) ”Digital Image Pro-
cessing”, 2
nd
ed.: Prentice Hall
Shevell, S. K. (2003). ”The Science of Color”. 2nd ed.: Op-
tical Society of America
B
´
enallal, M., Meunier, J. (2003). ”Real-time color segmen-
tation of road signs”. In: IEEE Canadian Conf. on
Electrical and Computer Engineering, Montr
´
eal
Vitabile, S., Gentile, A., Sorbello, F. (2002). ”A neural net-
work based automatic road sign recognizer”. In: In-
tern. Joint Conf. on Neural Networks, Honolulu
Lazarevic-McManus, N., Renno, J., Jones, G.A. (2006).
”Performance evaluation in visual surveillance using
the F-measure”. In: Proc. of the 4th International
Workshop On Video Surveillance And Sensor Net-
works, pp. 45-52, ACM Press, New York
COLOR FEATURES FOR VISION-BASED TRAFFIC SIGN CANDIDATE DETECTION
113
