
A VLSI-ORIENTED AND POWER-EFFICIENT APPROACH FOR
DYNAMIC TEXTURE RECOGNITION APPLIED TO SMOKE
DETECTION
Jorge Fern´andez-Berni, Ricardo Carmona-Gal´an and Luis Carranza-Gonz´alez
Institute of Microelectronics of Seville (IMSE-CNM)
Consejo Superior de Investigaciones Cient´ıficas y Universidad de Sevilla
Avda. Reina Mercedes s/n 41012, Seville, Spain
Keywords:
Dynamic texture recognition, Power-efficient VLSI implementation, Smoke detection, Forest fire detection.
Abstract:
The recognition of dynamic textures is fundamental in processing image sequences as they are very common
in natural scenes. The computation of the optic flow is the most popular method to detect, segment and analyse
dynamic textures. For weak dynamic textures, this method is specially adequate. However, for strong dynamic
textures, it implies heavy computational load and therefore an important energy consumption. In this paper,
we propose a novel approach intented to be implemented by very low-power integrated vision devices. It
is based on a simple and flexible computation at the focal plane implemented by power-efficient hardware.
The first stages of the processing are dedicated to remove redundant spatial information in order to obtain
a simplified representation of the original scene. This simplified representation can be used by subsequent
digital processing stages to finally decide about the presence and evolution of a certain dynamic texture in the
scene. As an application of the proposed approach, we present the preliminary results of smoke detection for
the development of a forest fire detection system based on a wireless vision sensor network.
1 INTRODUCTION
A temporal texture or dynamic texture (DT) is a
spatially-repetitive time-varying visual pattern whose
temporal variation presents certain stationarity (Nel-
son and Polana, 1992). An additional feature of a
DT is its indeterminate spatial and temporal extent.
Smoke, waves, a flock of birds or tree leaves swaying
in the wind are some examples of DTs.
The recognition of DTs plays an essential role in
image processing as they are very common in natu-
ral scenes. Different methods have been proposed to
realize this process of recognition, as described in a
recent review (Chetverikov and P´eteri, 2005). The
methods based on optic flow are currently the most
popular. Optic flow is a computationally efficient and
natural way to characterise the local dynamics of a
temporal texture. Specially, this is the case for weak
dynamic textures, that is, textures defined by a lo-
cal moving coordinate system in which they become
static. However, the recognition of strong dynamic
textures implies a much greater computational effort.
For these textures, possessing intrinsic dynamics, the
brightness constancy assumption associated to stan-
dard optical flow algorithms cannot be applied. More
complex approaches must be considered in order to
overcome this problem. Recently, interesting results
have been achieved by applying the so-called bright-
ness conservation assumption (Amiaz et al., 2007).
However, this method means heavy computational
load and the subsequent high energy consumption.
There are certain systems where a power-efficient
implementation of DT recognition is totally manda-
tory. Wireless multimedia sensor networks (Akyildiz
et al., 2007) is an obvious example. These networks
are composed of a large number of low-power sen-
sors that are densely deployed throughout a region
of interest in order to capture and analyse video, au-
dio and environmental data from their surroundings.
The massive and scattered deployment of these sen-
sors makes them quite difficult to service and main-
tain. Therefore, energy efficiency must be a major de-
sign goal of this kind of systems in order to prolong
the lifetime of the batteries as much as possible.
In this paper, we propose a novel approach to de-
tect DTs in scenes surveilled by very low-power inte-
grated vision devices. It is based on a signal process-
ing architecture where redundant spatial information
307
Fernandez-Berni J., Carmona-Galán R. and Carranza-González L. (2009).
A VLSI-ORIENTED AND POWER-EFFICIENT APPROACH FOR DYNAMIC TEXTURE RECOGNITION APPLIED TO SMOKE DETECTION.
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications, pages 307-314
DOI: 10.5220/0001766903070314
Copyright
c
SciTePress

is removedat the very first stages of the processing by
means of a simple, flexible and power-efficient com-
putation at the focal plane. The final decision about
the presence of a certain DT in the scene is realized
by analysing the reduced representation of the origi-
nal data obtained from the focal plane. Thus, the com-
putational load is greatly alleviated.
As an application of this approach, we study the
smoke detection within a wireless vision sensor net-
work devotedto forestfire detection. The results point
to a very high reliability and robustness in the process
of detection.
2 BINNING PROCESS
In general, existing research on DT recognition is
based on global features computed over the whole
scene. A clear sign of this fact is that practically all
of the sequences composing the reference database
DynTex (P´eteri et al., 2006) contain only close-ups of
DTs. For these sequences, it does make sense to apply
strategies of global feature recognition over the whole
scene. However, there are interesting applications of
DT recognition, e.g. video-surveillance, where tex-
tures can appear at any location of the scene. In this
case, a previous detection and subsequent analysis of
candidate regions to contain a certain DT could re-
duce the computational load by progressively reduc-
ing the amount of data to process. To detect such can-
didate regions, we can take advantage of the spatial
repeatability of patterns in DTs. In this way, we are
going to divide the scene into blocks, or bins, whose
size S
B
is defined, in pixels, as:
S
B
= W × H (1)
The fundamental concept of the proposed ap-
proach is that each bin of the scene, labelled as (i, j),
can be considered as an independent entity capable
of detecting the presence of a determined spatial pat-
tern within it. When a bin detects the spatial pattern,
it is marked as a candidate bin to contain a part of a
DT whose spatially-repetitive pattern coincides with
the detected pattern. A subsequent phase of spatio-
temporal analysis of the candidate bins will eventu-
ally confirm or dismiss the presence of the DT. Note
that, during this phase, the amount of data to be pro-
cessed is reduced by a factor W × H with respect to
the previous phase of candidate bin detection.
Every bin will be represented by only one value.
This value must be defined in such a way that the pres-
ence of a certain spatial pattern within it can be eas-
ily detected. We propose to define the representative
value of the bins in terms of spatial frequency infor-
mation. For example, consider the detection of a flock
of birds passing along the sky. A flock of birds in con-
trast with sky entails significant information at spatial
frequencies greater than 0, which expresses the origin
of coordinates in the Fourier space. Let us suppose
that each bin (i, j) of the scene is represented by the
following value:
B
ij
=
P
ij
(k > 0)
P
ij
(k)
(2)
where P
ij
(k > 0) is the power at the bin (i, j) for all
of the spatial frequencies other than k = 0 and P
ij
(k)
is the power at the bin (i, j) for all the spatial fre-
quencies including k = 0. The bidimensional vector
k represents the 2π-normalized wavenumber vector.
Applying this expression, the recognition of a spatial
pattern similar to that of a flock of birds is straightfor-
ward. In Fig. 1 a grayscale binned image of a flock of
birds is depicted along with its representation using
Eq. 2. It can be seen that even a recognition of zones
with different density of birds can be carried out from
the value of B
ij
. A global pixel-based analysis is not
necessary.
1
0
Figure 1: Example of processing to detect candidate bins.
This example allows to understand how the detec-
tion of DTs can be simplified by means of a binning
process. However, a thorough analysis to establish an
optimum value of S
B
has not been realized. It is an es-
sential aspect of the proposed approach. The value of
S
B
must be adequate to detect a certain spatial pattern
as well as to track its temporal dynamics across the
scene. Therefore, it will depend not only on the spa-
tial pattern but also on the spatio-temporal dynamics
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
308

of the texture. Later in this paper we describe the tun-
ning of S
B
, along with other parameters, for smoke
detection within the framework of forest fire detec-
tion.
3 SIGNAL PROCESSING
ARCHITECTURE
The only element missing now is an efficient compu-
tation of the spatial frequency components present in
each and every bin. Thus, moving part of the heaviest
computational effort to the focal plane would result in
a flexible and power-efficient architecture. This ap-
proach is inherent to biological vision systems, like
the human retina, where visual information is cap-
tured and preprocessed, alleviating the data flow sent
to the visual cortex (Roska and Werblin, 2001). In
this way, low-level tasks, according to the classifica-
tion in (Pirsch and Stolberg, 1998), whose require-
ments of accuracy are not too demanding, are realized
in parallel by highly efficient, although moderately
coarse, analog hardware at the focal plane. Physi-
cal implementations based on this processing archi-
tecture achieve higher performance with less cost and
power (Carmona et al., 2003). In our case, we are go-
ing to convey the detection of candidate bins to the
focal plane. A microprocessor would make the final
decision about the presence or absence of the DT by
analysing the preprocessed and therefore reduced in-
formation represented by these candidate bins. Note
that this processing architecture simply removes re-
dundant data at the focal plane in order to deliver to
the microprocessor just the necessary information to
track and detect the texture.
At thispoint, we need to define a flexible hardware
structure at the focal plane in order to be able to detect
any DT. Such a structure must satisfy two conditions:
1. The size of the bins S
B
can take any value
2. Information about any particular band of spatial
frequencies can be extracted at every bin
A structure fulfilling both conditions is depicted
in Fig. 2. It consists of a M × N grid where the value
of each pixel is stored in a capacitor. These capaci-
tors are 4-connected to the neighboring capacitors by
means of analog switches. These switches are con-
trolled by the corresponding row or column selection
signal. When selected, i. e. the control signal is high,
the switch behaves as a resistor connecting the two
nodes, whose utility will be explained in short. If the
control signal is low the switch is in the boundary of
a bin. Thus the particular distribution of 0’s and 1’s
in the set of row and column selection signals estab-
lishes the size and amount of bins in which the image
plane is divided.
Figure 2: Processing structure at the focal plane.
Once S
B
is determined, a resistive grid is estab-
lished within every bin taking into account the resis-
tance of the switches when they are on. Such a re-
sistive grid can carry a linear diffusion of the pixel
values within the bin as long as the switches remain
ON, let us say a period of time ∆t. Consider y
ij
(x, y)
as a function defining the values of the pixels within
the bin (i, j). The linear diffusion can be expressed as
(Jahne et al., 1999):
Y
ij
(k, ∆t) = Y
ij
(k, 0)e
−4π
2
D∆t|k|
2
(3)
where Y
ij
(k, ∆t) is the spatial Fourier transform of the
subimage contained in the bin after ∆t seconds and
Y
ij
(k, 0) is the transform at time t = 0, that is, just
before starting the diffusion. The constant D is the
diffusion coefficient.
From Eq. 3, the power of each frequency compo-
nent during the process of diffusion is:
|Y
ij
(k, ∆t)|
2
= |Y
ij
(k, 0)|
2
e
−8π
2
D∆t|k|
2
(4)
which can be expressed as:
|Y
ij
(k, ∆t)|
2
= [1 − α(k, ∆t)]|Y
ij
(k, 0)|
2
(5)
where α(k, ∆t) is the attenuation undergone by each
component at frequency k after ∆t seconds of linear
A VLSI-ORIENTED AND POWER-EFFICIENT APPROACH FOR DYNAMIC TEXTURE RECOGNITION APPLIED
TO SMOKE DETECTION
309

diffusion. This attenuation increases along time and
is more significant for higher frequencies.
Therefore, by controlling ∆t we can obtain infor-
mation at different bands of spatial frequencies. Con-
sider the simplest case, a lowpass filter. We can spec-
ify a maximum attenuation for the passband α
P
, with
a cut-off spatial frequency of |k
P
|. At the same time,
for the stopband, a minimum attenuation α
S
is re-
quired starting at frequency |k
S
|. Then, the period of
time after which the linear diffusion must be stopped
in order to carry out the so defined filtering is between
these two bonds:
|ln(1− α
S
)|
8π
2
D|k
S
|
2
≤ ∆t ≤
|ln(1− α
P
)|
8π
2
D|k
P
|
2
(6)
Then, providing the means for storing and com-
bining two consecutive samples of the diffused im-
age, taken after ∆t
1
and ∆t
2
from the starting point of
the diffusion, we can compute a bandpass, a highpass
or a bandreject filter. Keep in mind, however, that the
highest frequency feature that can be consideredis de-
termined by the size of the pixel, and therefore a real
highpass filter is actually a bandpass filter.
A crucial property of the structure just defined is
that the diffusion operation is really a simple charge
redistribution which does not consume energy, i. e. it
is realized by a passive network. That is to say, the
signal processing within the structure just described
is massively parallel and ultra power-efficient.
4 AN APPLICATION TO SMOKE
DETECTION
As an application of the approach previously ex-
plained, we present a vision algorithm suitable for a
forest fire detection system based on a wireless vision
sensor network. The vision sensors will be placed on
top of poles in order to focus the canopy of small veg-
etation areas. Each sensor of the network will run
on-site a vision algorithm in order to detect smoke
arising among the vegetation. When a sensor detects
smoke, a warning message is sent to a control center
by multihopping. This structure of the system, based
on a careful placing of the sensors, reduces signifi-
cantly the sources of false alarms with respect to its
counterparts based on lookout towers with automatic
surveillance. On the contrary, because of the neces-
sary dense deployment of vision sensors, energy effi-
ciency is a key point impacting the system cost.
The smoke detection algorithm is based on the
analysis of the sequence of images captured by each
sensor. We define the time interval between two con-
secutively captured images as T
C
. These images are
comparedto a reference image, the background, in or-
der to detect changes generated by smoke dynamics.
This method of motion detection, called background
subtraction (Hu et al., 2004), is suitable for scenes
with a relatively static background. In the case of the
proposed system, the visual field is basically com-
posed of vegetation, and therefore the background
will hardly suffer significant sudden changes. It will
experience, however, gradual illumination changes
throughout the day. Taking this fact into account, the
reference image will be updated every time interval
T
R
.
Regarding the binning process, note that the ap-
pearance of smoke in any scene means the equaliza-
tion of the R, G and B components in the pixels af-
fected by smoke (Chen et al., 2006). Therefore, it
could be a criterion to detect candidate bins. How-
ever, we propose a more data-efficient option based
only on the detection of sudden increases in the B
component with respect to the background. The use
of the B component is owing to its greater sensitiv-
ity in natural scenarios with vegetation to the changes
generated by smoke when compared to the R and G
components and combined luminance. This will also
discard changes introduced by sources different than
smoke, like the motion of tree leaves.
Consider Fig. 3. We have highlighted different
zones in three scenes where the background is mainly
constituted by vegetation. These frames correspond
to different parts of the associated sequences, before
and after a trace of smoke has appeared in the field of
view. Table 1 shows the normalized average increase,
referred to the image without smoke, undergone by
each RGB component and the combined luminance
of the pixels within the marked zones in presence of
smoke. It can be seen that, in all cases, the appearance
of smoke amongvegetation conveysa greater increase
in the B component than that observed in the R and G
components and the combined luminance.
Therefore, each bin will be represented by the av-
erage value of the B component of its pixels. In terms
of spatial frequencies, it is equivalent to say that we
are interested in the information contained at k = 0.
The value of S
B
will depend on the average variation
in the number of smoke pixels during their appear-
ance in the scene: the less the average variation, the
smaller the necessary size of the bins to track the dy-
namics. Consider a sequence of k consecutive images
containing smoke captured by a sensor. The average
variation in the number of smoke pixels will be:
¯
V =
∑
k
i=1
| U
T
[i] −U
T
[i− 1] |
k
(7)
where U
T
[i] is the total number of smoke pixels of the
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
310

(a) (b) (c)
Figure 3: Three typical scenes with vegetation background without smoke and in presence of smoke.
Table 1: Normalized average increase, referred to the case without smoke, suffered by each component in the zones marked
in Fig. 3.
R component G component B component Luminance
Scene (a) 13.8% 14.5% 20% 14.9%
Scene (b) 12.5% 13.4% 19.5% 13.8%
Scene (c) 11% 12.8% 16.4% 12.7%
i−th image of the sequence (supposeU
T
[0] = 0). Ac-
cording to this expression, the smoke dynamics repre-
sented by these images can be correctly tracked when-
ever S
B
fulfills the following condition:
S
B
≤
¯
V (8)
Finally, the condition which must be satisfied in
order to consider a foreground bin B
F
ij
as a candidate
bin to contain smoke is:
B
F
ij
− B
B
ij
>
p
th
100
(B
MAX
− B
MIN
) (9)
where p
th
represents the threshold percentage of the
B component signal range, set by (B
MAX
− B
MIN
),
which the B component of a foregroundbin B
F
ij
must
rise with respect to the corresponding background bin
B
B
ij
.
Once the candidate bins are detected, the algo-
rithm analyses them looking for the spatio-temporal
dynamics which is characteristic of smoke. This stage
of the algorithm is divided into two phases: the detec-
tion and the confirmation phase. The detection phase
starts when the first candidate bins are discovered, an
instant denoted as t
0
, and finishes at t = t
D
. Then the
confirmation phase is started, and will finish, if the
result is positive, at time t = t
F
, by sending an alarm
message. The internal processing at both phases is
described next.
First of all, in order to consider that smoke is
present at the scene, a minimum number of candi-
date bins must exist. Let us define N(t) as the number
of candidate bins at time instant t. This parameter
changes every T
C
, that is, with every captured image.
During the confirmation phase, the following expres-
sion must be fulfilled:
N(t) ≥ N
MIN
{t ∈ [t
D
,t
F
]}
(10)
where N
MIN
represents the minimum necessary num-
ber of candidate bins to consider smoke.
Another important element of the smoke dynam-
ics is its gradual appearance into the scene. Once the
first candidate bins are detected, new candidate bins
must gradually appear until reaching at least N
MIN
at
t = t
D
. This fact can be described by means of two
conditions. The first one is:
t
D
− t
0
≤ T
D
MAX
(11)
where T
D
MAX
represents the maximum time interval
within which smoke must appear into the scene once
the first candidate bins are detected. The second con-
dition is:
N(t) − N(t − T
C
) ≤ G
MAX
{t ∈ [t
0
,t
F
]}
(12)
where G
MAX
expresses the maximum permitted
growth of candidate bins between two consecutive
captured images during the smoke dynamics.
Finally, smoke does not appear as candidate bins
scattered throughout the scene. On the contrary, it
A VLSI-ORIENTED AND POWER-EFFICIENT APPROACH FOR DYNAMIC TEXTURE RECOGNITION APPLIED
TO SMOKE DETECTION
311

is formed by compact regions of candidate bins. Let
us define Z(t) as the number of 8-connected regions
of candidate bins. Just like N(t), Z(t) changes with
every captured image. The compactnessof smoke can
be described as:
Z(t) ≤ Z
MAX
{t ∈ [t
0
,t
F
]}
(13)
being Z
MAX
the maximum permitted number of 8-
connected regions during the smoke dynamics.
The duration of the confirmation phase will be
fixed, that is:
t
F
− t
D
= T
F
(14)
Therefore, the spatio-temporal dynamics of
smoke can be summarised as follows: a minimum
number of candidate bins N
MIN
must appear once the
first candidate bins are discovered at t = t
0
. The time
instant at which N
MIN
is reached, t = t
D
, establishes
the end of the detection phase and the beginning of the
confirmation phase. Besides, t
D
must fulfill Eq. (11),
accounting in this way for the time scale of the grad-
ual appearance of smoke in the scene. If the limit es-
tablished by T
D
MAX
is reached without having accom-
plished the minimum candidate bins fixed by N
MIN
,
then the process starts again as the detection was trig-
gered by something that was not smoke. If the de-
tection is correct confirmation phase starts. During
this phase, whose duration is determined by Eq. (14),
the number of candidate bins must be always above
N
MIN
, i. e. they must satisfy Eq. (10). In this way,
we take into account that smoke does not disappear
suddenly from the scene. Finally, the growth rate of
smoke, defined in Eq. (12), and the compactness of
the smoke traces in the scene, representedby Eq. (13),
are checked during both the detection phase and the
confirmation phase. Failure in holding these condi-
tions means tracking some dynamics belonging to a
source different from smoke, what stops the process
returning to the beginning of the detection cycle.
5 PRELIMINARY TESTS
In order to test the vision algorithm, we realized some
recordings in natural scenarios. They were carried
out in 9 different locations under different illumina-
tion conditions using three different cameras. Ap-
proximately 80 minutes were recorded containing 16
sequences of gradual appearance of smoke following
its natural evolution in scenes whose background is
basically composed of vegetation and numerous se-
quences without smoke in order to check the false
alarm rate. The resolution of the frames is 720× 576
px and the frame rate is 25 frames per second in all
the recordings. As an example, the images in Fig. 3
correspond to three different tests.
To set the values of the parameters of the algo-
rithm, we analysed 9 of the 16 different sequences
where smoke appears gradually (Fern´andez-Berni,
2008). The other 7 sequences will be employed to test
the algorithm later. Specifically, 25 seconds of every
sequence were analysed. The starting point is just be-
fore smoke begins to appear. Only the B component
of the frames was used for the adjustment.
The proposed algorithm presents a basic parame-
ter: T
C
. It establishes the temporal scale of the smoke
dynamics. In order to determine its value, we first de-
tected the pixels affected by smoke. Indeed, smoke
is the most significant foreground motion in the 9 se-
quences analysed. Therefore, we can consider that a
pixel represents smoke if:
p
F
(x, y) − p
B
(x, y) > ε (15)
where p
F
(x, y) is the foreground value of the pixel
(x, y), p
B
(x, y) is its background value and ε is the
pixel noise of the camera.
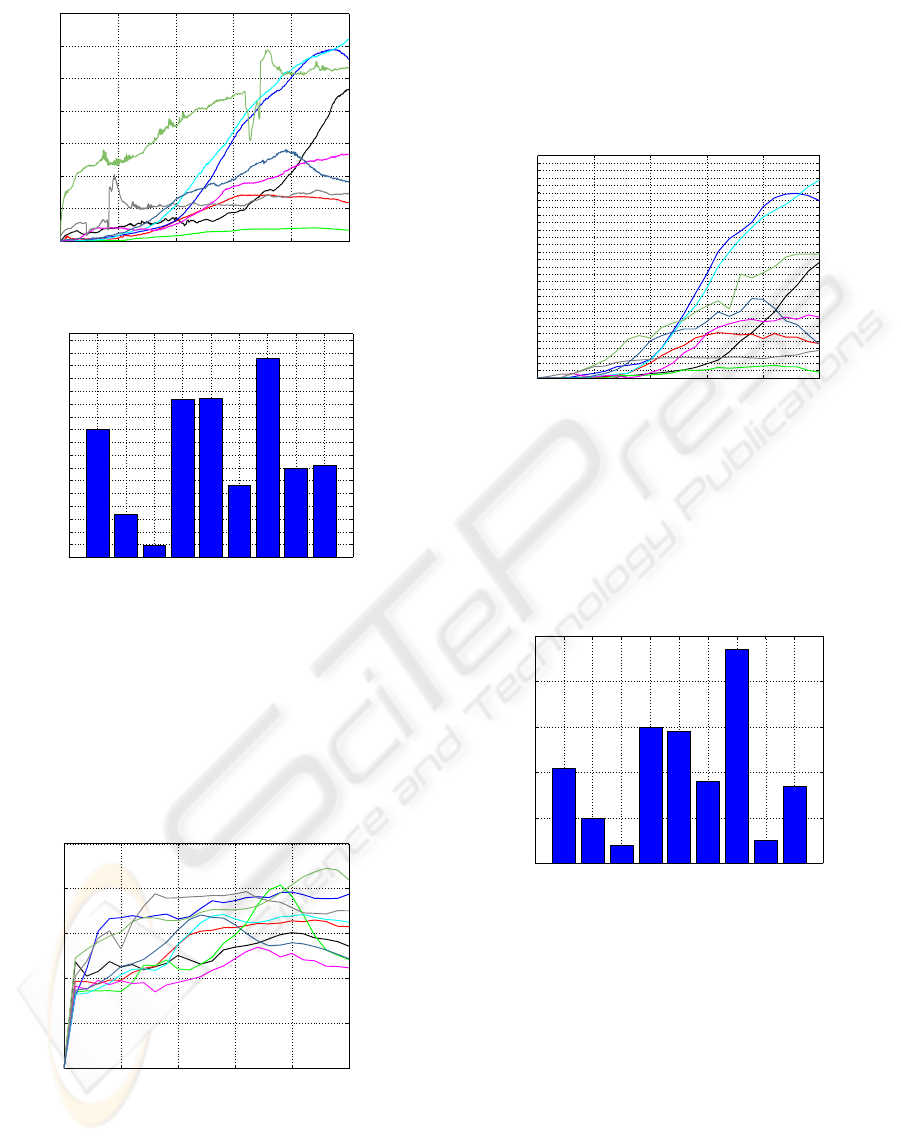
Once the smoke pixels are detected, the parame-
ter T
C
must reflect the temporal scale of its dynam-
ics. At the same time, this parameter must be as large
as possible to reduce the processing load. Consider
Fig. 4. It shows a magnitude that is very sensitive
to the smoke dynamics: the number of smoke pix-
els per frame of every sequence. If we examine the
evolution of these curves in the frequency domain, it
can be seen that most of the power is concentrated at
very low frequencies. In fact, at f = 0.5Hz the power
of the DFT is approximately three orders of magni-
tude smaller than the power at f = 0Hz for all the
sequences. This means that the essential characteris-
tics of the dynamics can be tracked by only analysing
the frequency interval [0, 0.5]Hz. In terms of T
C
, it is
translated into T
C
= 1s, that is, a sample frequency of
1Hz. Therefore, the adjusment of the rest of parame-
ters will be realized taking into account that T
C
= 1s.
To determine S
B
, we represent
¯
V for each se-
quence in Fig. 5. It can be seen that the minimum
value is approximately 200 smoke pixels per second.
According to Eq. (8), this is the maximum number of
pixels which must contain every bin in order to track
the smoke dynamics. Taking into account the resolu-
tion of the frames, the size of the bins must be 15× 12
pixels (180 pixels). It is important to emphasize that,
thanks to the binning process, the initial information
composed of 0.4Mpx is reduced to only 2.3Kbins .
Besides, in this case, every bin can be represented by
only one bit indicating if it is marked as a candidate
bin or not.
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
312
0 5 10 15 20 25
0
1
2
3
4
5
6
7
x 10
4
Time (seconds)
Number of smoke pixels
Figure 4: Number of smoke pixels per frame.
1 2 3 4 5 6 7 8 9
0
200
400
600
800
1000
1200
1400
1600
1800
2000
2200
2400
2600
2800
3000
3200
3400
Sequence
¯
V
Figure 5: Average variation in the number of smoke pixels
for each sequence.
Regarding the percentage p
th
, consider Fig. 6. It
represents the average increase, normalized to the sig-
nal range, of the pixels affected by smoke with regard
to the background. It can be seen that the average
increase exceeds 10% for most of the time. We are
going to extrapolate this result to the candidate bins
by setting p
th
= 10%.
0 5 10 15 20 25
0
5
10
15
20
25
Time (seconds)
Average increase (%)
Figure 6: Normalized average increase of the pixels affected
by smoke.
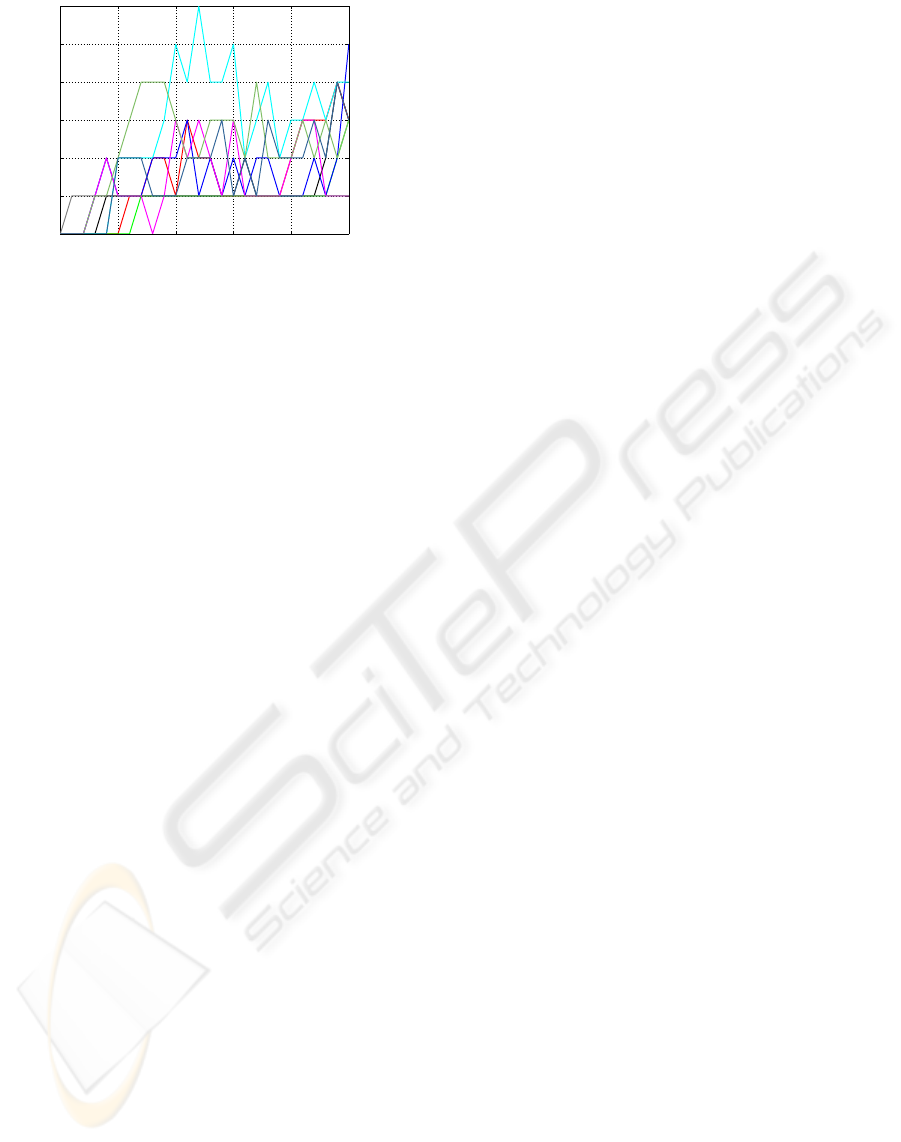
Applying Eq. (9) with the values of S
B
and p
th
just
set, we obtain the number of candidate bins of the se-
quences, as depicted in Fig. 7. According to this rep-
resentation, the minimum number of candidate bins
reached in the sequences is 17. We set N
MIN
= 14
in order to concede a margin of three candidate bins.
This choice implicitly sets T
D
MAX
= 20s and T
F
= 4s.
Therefore, the detection of smoke will be carried out
within a maximum interval of 24s after the discovery
of the first candidate bins.
0 5 10 15 20 25
0
10
20
30
40
50
60
70
80
90
100
110
120
130
140
150
160
170
180
190
200
210
220
230
240
250
260
270
280
290
300
Time (seconds)
N(t)
Figure 7: Number of candidate bins at every second of the
sequences.
At this point, it is easy to adjust the value of
G
MAX
. Consider Fig. 8, where the maximum growth
rate of candidate bins is represented for each se-
quence. Among these maximum rates, the greatest
is 47 bins per second. We set G
MAX
= 50, adding a
small margin of three bins.
1 2 3 4 5 6 7 8 9
0
10
20
30
40
50
Sequence
Maximum growth rate (candidate bins per second)
Figure 8: Maximum growth rate of candidate bins in each
sequence.
There are two parameters left: Z
MAX
and T
R
. To
determine Z
MAX
, consider the Fig. 9 where the num-
ber of 8-connected regions of candidate bins is de-
picted throughout the sequences. We can see that the
maximum value is 6. Besides, it is only reached once
in one of the sequences. Therefore, we set Z
MAX
= 6,
without additional margin.
Finally, with respect to T
R
, longer recordings are
mandatory in order to estimate an approximate value
of this parameter. Even for the longest sequence anal-
ysed, whose duration is 458s (around 8 minutes),
smoke detection was possible without updating the
initial reference image.
A VLSI-ORIENTED AND POWER-EFFICIENT APPROACH FOR DYNAMIC TEXTURE RECOGNITION APPLIED
TO SMOKE DETECTION
313
0 5 10 15 20 25
0
1
2
3
4
5
6
Time (seconds)
Z(t)
Figure 9: Number of 8-connected regions of candidate bins
during the sequences.
Once the parameters were set, we applied the al-
gorithm, to all the recordings. Smoke was detected
in the 16 smoke sequences, the 9 employed to set the
parameters, obviously, and the other 7. Besides, in
the rest of sequences where smoke was not present,
no false alarm was detected. Therefore, the algorithm
achieves the highest reliability when applied to all our
recordings.
6 CONCLUSIONS
A new generic approach to detect dynamic textures
has been presented. It is specially suitable for real-
time applications where the power requirements de-
mand very low energy consumption. As an applica-
tion, we propose the smoke detection within a forest
fire detection system based on a wireless vision sen-
sor network. A set of recordings was carried out in
natural scenarios in order to validate the feasibility of
the proposed approach for this application. The re-
sults point to a very high reliability and robustness
in the process of detection. Our primary next objec-
tive is the physical implementation of a vision chip
whose focal plane includes the structure proposed in
this paper. We also intend to extend the applicabil-
ity of the proposed approach by defining new vision
algorithmswhich can take significant advantage of in-
cluding both binning and spatial filtering within each
bin.
ACKNOWLEDGEMENTS
This work is funded by Junta de Andaluc´ıa (CICE)
through project 2006-TIC-2352.
REFERENCES
Akyildiz, I., Melodia, T., and Chowdhury, K. (2007). A
survey on wireless multimedia sensor networks. Com-
puter Networks, 51(4):921–960.
Amiaz, T., Fazekas, S., Chetverikov, D., and Kiryati, N.
(2007). Detecting regions of dynamic texture. In
International Conference on Scale Space and Varia-
tional Methods in Computer Vision (SSVM’07), pages
848–859.
Carmona, R., J´ımenez-Garrido, F., Dom´ınguez-Castro, R.,
Espejo, S., Roska, T., Rekeczky, C., and Rodr´ıguez-
V´azquez, A. (2003). A bio-inspired 2-layer mixed-
signal flexible programmable chip for early vision.
IEEE Transactions on Neural Networks, 14(5):1313–
1336.
Chen, T., Yin, Y., Huang, S., and Ye, Y. (2006). The
smoke detection for early fire-alarming system based
on video processing. In IEEE International Confer-
ence on Intelligent Information Hiding and Multime-
dia Signal Processing (IIH-MSP’06), pages 427–430,
California, USA.
Chetverikov, D. and P´eteri, R. (2005). A brief survey of dy-
namic texture description and recognition. In Interna-
tional Conference on Computer Recognition Systems
(CORES’05), pages 17–26, Rydzyna Castle, Poland.
Fern´andez-Berni, J. (2008). Video database:
Smoke propagation in natural scenarios.
http://www.imse.cnm.es/∼berni/.
Hu, W., Tan, T., Wang, L., and Maybank, S. (2004). A
survey on visual surveillance of object motion and be-
haviors. IEEE Transactions on Systems, Man. and Cy-
bernetics, 34(3):334–352.
Jahne, B., Hauβecker, H., and Geiβler, P. (1999). Hand-
book of Computer Vision and Applications, volume 2,
chapter 4. Academic Press.
Nelson, R. and Polana, R. (1992). Qualitative recognition
of motion using temporal texture. CVGIP: Image Un-
derstanding, 56(1):78–89.
P´eteri, R., Huskies, M., and Fazekas, S. (2006). Dyn-
tex: A comprehensive database of dynamic textures.
http://www.cwi.nl/projects/dyntex/.
Pirsch, P. and Stolberg, H. (1998). VLSI implementations
of image and video multimedia processing systems.
IEEE Transactions on Circuits and Systems for Video
Technology, 8(7):878–891.
Roska, B. and Werblin, F. (2001). Vertical interactions
across ten parallel, stacked representations in the
mammalian retina. Nature, 410:583–587.
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
314
