A YARP-BASED ARCHITECTURAL FRAMEWORK
FOR ROBOTIC VISION APPLICATIONS
Stefán Freyr Stefánsson, Björn Þór Jónsson
Database Lab and School of Computer Science, Reykjavík University, Kringlan 1, IS-103 Reykjavík, Iceland
Kristinn R. Thórisson
CADIA and School of Computer Science, Reykjavík University, Kringlan 1, IS-103 Reykjavík, Iceland
Keywords:
YARP, Computer vision, Architecture, Performance evaluation.
Abstract:
The complexity of advanced robot vision systems calls for an architectural framework with great flexibility
with regards to sensory, hardware, processing, and communications requirements. We are currently developing
a system that uses time-of-flight and a regular video stream for mobile robot vision applications. We present
an architectural framework based on YARP, and evaluate its efficiency. Overall, we have found YARP to be
easy to use, and our experiments show that the overhead is a reasonable tradeoff for the convenience.
1 INTRODUCTION
One of the most important sensory mechanisms for
mobile robots is a sense of vision that robustly
supports movement and manipulations in a three-
dimensional world. Here, we use “vision” broadly to
encompass any visuospatial sensory inputs and pro-
cessing required for an understanding of the environ-
ment. Accumulated experience has shown, however,
that for such robotic vision it is necessary to employ a
number of sensors and processing mechanisms, inte-
grated in various ways—often dynamically—to sup-
port realtime action in various contexts.
We are developing such a vision system, which
will eventually employ a number of techniques, in-
cluding (a) color video cameras, which provide shape
and color information but do not easily give depth in-
formation, (b) time-of-flight cameras, which can yield
sufficient depth information to create a depth map of
the environment, (c) image descriptions, such as edge
maps and SIFT descriptors (Lowe, 2004), which can
be used for object recognition and obstacle detection,
and (d) a communications infrastructure (Thórisson
et al., 2007; Tweed et al., 2005; Thórisson et al.,
2005) which allows basic real-time processing on the
robot itself, while more advanced processing may
take place on a dedicated off-board cluster.
In order to study the use and interactions of all
Communication
Sensors
Hardwar e
Software
SIFT
OpenCV
...
Figure 1: Architectural Requirements
these components it is clearly necessary to use an ar-
chitectural framework which supports flexible manip-
ulation of such compound, multimodal data, on di-
verse hardware platforms. Such a framework must
allow for easy runtime configuration of the process-
ing pipeline, while incurring limited overhead. Low-
level options, such as shared memory and/or remote
procedure calls, are not flexible enough, as they must
be augmented with mechanisms for handling variable
latency, priorities or other necessary features of com-
plex architectures and soft-realtime response gener-
ation. What is needed is a higher-level framework
that supports free selection of communication meth-
ods, including shared memory and TCP/IP, depending
on the data and architectural constraints at any point
in time. The architectural requirements are illustrated
in Figure 1, which depicts four major categories of re-
quirements: sensory aparati, other hardware, software
65
Freyr Stefà ˛ansson S., Ã
¯
døsr Jøsnsson B. and R. Thøsrisson K.
A YARP-BASED ARCHITECTURAL FRAMEWORK FOR ROBOTIC VISION APPLICATIONS.
DOI: 10.5220/0001773600650068
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications (VISIGRAPP 2009), page
ISBN: 978-989-8111-69-2
Copyright
c
2009 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

and communication.
Several frameworks exist which partially address
our needs, but very few address all of them. One of
these frameworks is YARP (Yet Another Robot Plat-
form), which is a set of libraries to cleanly decouple
devices from software architecture (Metta et al., 2006;
Fitzpatrick et al., 2008). It is an attempt to provide
a foundation that makes robot software more stable
and long-lasting, while allowing for frequent changes
of sensors, actuators, processors and networks. As
the authors themselves say: “YARP is written by
and for researchers in robotics, particularly humanoid
robotics, who find themselves with a complicated pile
of hardware to control with an equally complicated
pile of software” (Metta et al., 2006, p. 1).
We have constructed a preliminary vision sys-
tem using YARP as the communicationinfrastructure.
Overall, we have found YARP to be satisfactory and
easy to use. Installing and learning to use YARP took
about one man-week, while the rest of the time was
spent on creating hardware drivers and working with
the cameras.
In this paper we report on an effort to evaluate the
use of YARP for our architecture, by exploring how
well the platform supports our basic needs, such as for
sequential processing in a pipeline architecture. An
extended version of this paper may be found in (Ste-
fánsson et al., 2008).
2 COMMUNICATION
INFRASTRUCTURES
There are several potential candidates that can be cho-
sen as underlying communication infrastructure for
video data, including YARP (Metta et al., 2006; Fitz-
patrick et al., 2008), OpenAIR (Thórisson et al.,
2007), CAVIAR (List et al., 2005), Psyclone (Thóris-
son et al., 2005) and others. In the remainder of this
section we first give a short description of YARP, and
our reasons for evaluating it, and then briefly describe
some of the alternatives.
2.1 YARP
YARP (Yet Another Robot Platform) is a set of li-
braries to decouple devices, processing, and commu-
nication. YARP provides loose coupling between sen-
sors, processors, and actuators, thus supporting in-
cremental architecture evolution. The processes im-
plemented on top of YARP often lie relatively close
to hardware devices; YARP does therefore not “take
control” of the infrastructure but rather provides a set
of simple abstractions for creating data paths.
A key concept in YARP is that of a communica-
tions “port”. Processes can have zero, one or more
input ports, and produce output on zero, one or more
output ports. Ports are also not restricted to a single
producer or receiver—manyproducers can feed a sin-
gle port, and many receivers can read from a single
port. To keep track of ports, YARP requires a special
registry server running on the network. The data com-
municated over the ports may consist of arbitrary data
structures, as long as the producer and receiver agree
on the format. YARP provides some facility to trans-
late common datatypes between hardware architec-
tures and such translation can be easily implemented
in user defined datatypes as well. Each port may be
communicated via a host of transport mechanisms, in-
cluding shared memory, TCP/IP and network multi-
casting. YARP is thus a fairly flexible communication
protocol that leaves the programmer in control.
Our main reason for for evaluating YARP is the
fact that it is unobtrusive and basic. Other reasons
include the following:
• YARP abstracts the transport mechanism from
the software components, allowing any software
component to run on any machine. It supports
shared memory for local communication, and
TCP/IP, UDP, and multicast for communication
over a network.
• YARP interacts well with C/C++ code, which is
required for our time-of-flight camera. YARP can
be used with several other languages as well.
• YARP can communicate any data structure as
long as both receiver and sender agree on the for-
mat. Furthermore, it provides good built-in sup-
port for various image processing tasks and the
OpenCV library.
• It is open-source software. As we wish to make
our framework freely available, the communica-
tion infrastructure must also be freely available
(indeed, we have already sent in a few patches for
YARP, including camera drivers and utilities).
• Finally, although this was by no means obvious
from any documentation, the support given by
YARP developers has been both very responsive
and useful.
These requirements are undoubtedly also met by
alternative frameworks and libraries; we have not
yet made any formal attempt to compare YARP to
these other potential approaches. With a host of
tradeoffs the choice of low-level or mid-level middle-
ware/libraries can be quite complex, and we leave it
for future work to compare YARP in more detail to
the approaches described next.
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
66
2.2 Alternative Architectures
OpenAIR is “a routing and communication protocol
based on a publish-subscribe architecture” (Thóris-
son et al., 2007). It is intended to help AI re-
searchers develop large architectures and share code
more effectively. Unlike YARP, it is based around a
blackboard information exchange and optimized for
publish-subscribe scenarios. It has thoroughly de-
fined message semantics and has been used in several
projects, including agent-based simulations (Thóris-
son et al., 2005) and robotics (Ng-Thow-Hing et al.,
2007). OpenAIR has been implemented for C++, Java
and C#.
CAVIAR (Tweed et al., 2005) is a system based
on one global controller and a number of mod-
ules for information processing, especially geared
for computer vision, providing mechanisms for self-
describing module parameters, inputs and outputs,
going well beyond the standard services provided by
YARP and OpenAIR. The implementation contains a
base module with common functionalities (interface
to controller and parameter management).
Psyclone (see www.cmlabs.com) is an AI “oper-
ating system” that incorporates the OpenAIR spec-
ification. It is quite a bit higher-level than both
OpenAIR and YARP and provides a number of ser-
vices for distributed process management and devel-
opment. Psyclone was compared to CAVIAR by List
et al. (List et al., 2005) as a platform for computer vi-
sion. Like CAVIAR, Psyclone has mechanisms for
self-describing semantics of modules and message
passing. Unlike CAVIAR, however, Psyclone does
not need to pre-compute the dataflow beforehand but
rather manages it dynamically at runtime, optimizing
based on priorities of messages and modules. Both
CAVIAR and Psyclone are overkill for the relatively
basic architecture we intend to accomplish at present,
at least in the short term, but it is possible that with
greater expansion and more architectural complexity,
platforms such as Psyclone would become relevant,
perhaps even necessary.
Compared to, e.g., CAVIAR and Psyclone, YARP
looks like a fairly standard library—neither does it
do its own message scheduling nor does it provide
heavy-handed semantics for message definitions or
networking. That may be its very strength.
3 EXPERIMENTAL EVALUATION
In this section, we report on an initial performance
study of the YARP transport mechanisms. Further ex-
periments are reported in (Stefánsson et al., 2008).
0
10
20
30
40
50
1 2 3 4 5
Frame Rate (frames/sec)
Number of Blur Operations
Shared Memory
Local TCP/IP
Multicast
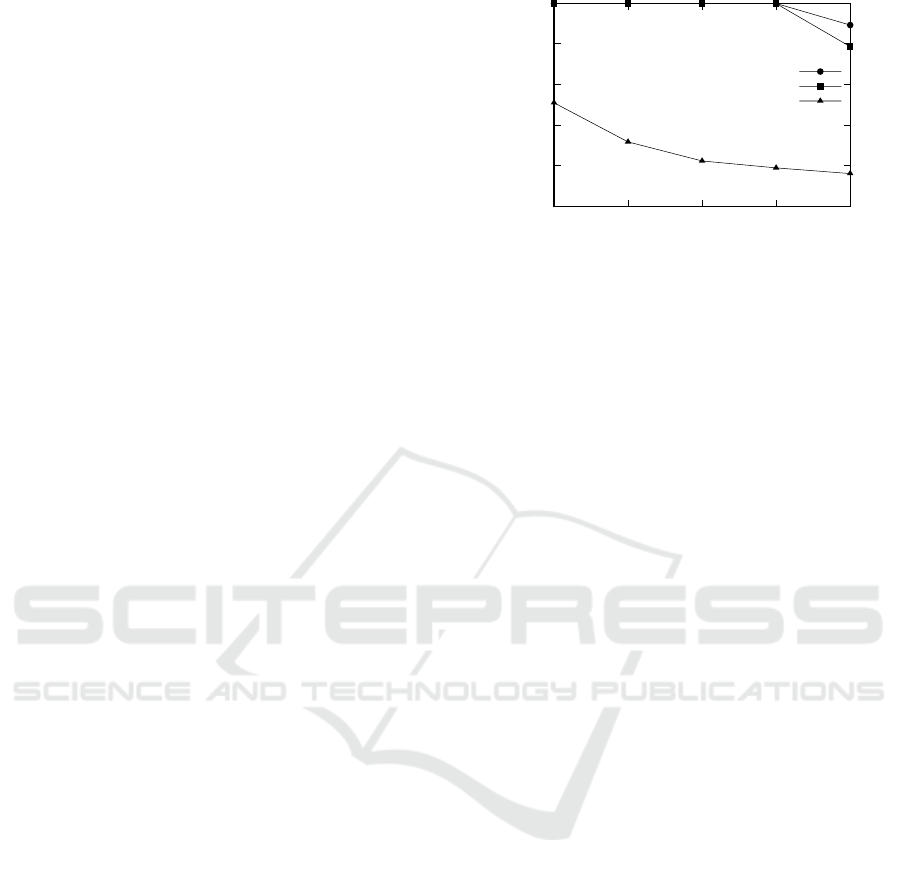
Figure 2: Frame rate at receiver.
3.1 Experimental Setup
In this study we focus on single processor configu-
rations. At present, the goal is thus not to study the
scalability of the system, but rather to compare some
configuration choices of YARP for vision.
We set up a basic processing pipeline, meant to
represent a typical setup, which consists of 1) a pro-
ducer, which produces 320x240 pixel image frames
at a given frame rate; 2) a number of blur opera-
tors, which run the “simple” OpenCV blur algorithm
over the frames; and 3) a receiver, which receives the
frames. We change the processing pipeline length, or
the number of blur operators, to study the effects of
overloading the computer.
Each frame is augmented by sequence numbers
and time stamps by each of these components, which
are then used to measure dropped frames and la-
tency, respectively. Other metrics collected include
the frame rate observed by the receiver (lower frame
rate occurs when frames are dropped) and CPU load.
Our experimental setup runs on a 2.6GHz Pentium
4 Dell OptiPlex GX270 computer with 1.2Gb RAM.
3.2 Transport Mechanism Performance
In this experiment, the frame rate of the producer was
set to 50 frames per second, which is similar to a high-
quality video stream. The length of the processing
pipeline was varied from one to five consequtive blur
operators. We ran measurements using shared mem-
ory, local TCP/IP and network multicast connections,
with the expectation that shared memory should be
fastest. For each configuration, the experiment was
run until the receiver had received 50,000 frames.
Figure 2 shows the frame rate observed by the re-
ceiver. The x-axis shows the length of the process-
ing pipeline. Overall, two effects are visible in the
figure. First, using local TCP/IP and shared memory
maintains a frame rate of 50 frames per second, until
A YARP-BASED ARCHITECTURAL FRAMEWORK FOR ROBOTIC VISION APPLICATIONS
67

0
50
100
150
200
250
1 2 3 4 5
Dropped Frames (thousands)
Number of Blur Operations
Shared Memory
Local TCP/IP
Multicast
Figure 3: Frame drops in pipeline.
the pipeline consists of more than four blur processes.
At that point, the processor is overloaded and frames
are dropped as a result, leading to lower frame rates
observed by the receiver. Shared memory performs
slightly better due to lower communication overhead.
Second, turning to the performance of multicast,
Figure 2 shows that the processing pipeline achieves
a much lower frame rate, ranging from 25 to 8 frames
per second. The reason for the lower frame rate is
clearly visible in Figure 3, which shows the number
of frames that are dropped for each configuration. As
Figure 3 shows, even with only one blur operator, ev-
ery other frame is dropped with the multicast mecha-
nism. The frame rate observed by the receiver is thus
only half the frame rate of the producer. As more
blur operators are added, more frames are dropped,
explaining the lower frame rates seen in Figure 2.
Turning to latency, Figure 4 shows that, as ex-
pected, latency of the multicast transport mechanism
is very high and constantly increasing with pipeline
length as frames can be dropped anywhere in the
pipeline. For the other two transport mechanisms, la-
tency is relatively low until the pipeline consists of
five blur operators. At that point, the CPU is satu-
rated and scheduling conflicts occur. Again, latency is
significantly lower using shared memory than TCP/IP
due to the lower communication overhead.
Further experiments have shown that the typi-
cal overhead of YARP communcations will be about
50%, which is a reasonable overhead for the conve-
nience of using YARP (Stefánsson et al., 2008).
4 CONCLUSIONS
We have described our efforts towards a flexible com-
puter vision infrastructure based on the YARP toolkit.
We have found YARP easy to use, as it greatly sim-
plifies making the infrastructure flexible towards sen-
sors, hardware, processing, and communication re-
0
50
100
150
200
1 2 3 4 5
Latency (ms)
Number of Blur Operations
Shared Memory
Local TCP/IP
Multicast
Figure 4: Latency of received frames.
quirements, compared to starting from scratch. Our
experiments show that the overhead is a reasonable
tradeoff for the convenience.
REFERENCES
Fitzpatrick, P., Metta, G., and Natale, L. (2008). Towards
long-lived robot genes. Robotics and Autonomous
Systems, 56(1):29–45.
List, T., Bins, J., Fisher, R. B., Tweed, D., and Thórisson,
K. R. (2005). Two approaches to a plug-and-play vi-
sion architecture - CAVIAR and Psyclone. In Work-
shop on Modular Construction of Human-Like Intelli-
gence, Pittsburgh, PA, USA.
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. International Journal of Com-
puter Vision, 60(2):91–110.
Metta, G., Fitzpatrick, P., and Natale, L. (2006). YARP:
Yet another robot platform. International Journal of
Advanced Robotic Systems, 3(1):43–48.
Ng-Thow-Hing, V., List, T., Thórisson, K. R., Lim, J., and
Wormer, J. (2007). Design and evaluation of commu-
nication middleware in a distributed humanoid robot
architecture. In Workshop on Measures and Proce-
dures for the Evaluation of Robot Architectures and
Middleware, San Diego, CA, USA.
Stefánsson, S. F., Jónsson, B. Þ., and Thórisson, K. R.
(2008). Evaluation of a YARP-based architectural
framework for robotic vision applications. Technical
Report RUTR-CS08004, Reykjavík University School
of Computer Science.
Thórisson, K. R., List, T., Pennock, C., and DiPirro, J.
(2005). Whiteboards: Scheduling blackboards for se-
mantic routing of messages & streams. In Workshop
on Modular Construction of Human-Like Intelligence,
Pittsburgh, PA, USA.
Thórisson, K. R., List, T., Pennock, C., and DiPirro, J.
(2007). OpenAIR 1.0 specification. Technical Re-
port RUTR-CS07005, Reykjavík University School of
Computer Science.
Tweed, D., Fang, W., Fisher, R., Bins, J., and List, T.
(2005). Exploring techniques for behaviour recogni-
tion via the CAVIAR modular vision framework. In
Proc. HAREM Workshop, Oxford, England.
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
68
