
GENERIC
MOTION BASED OBJECT SEGMENTATION FOR
ASSISTED NAVIGATION
Sion Hannuna
Department of Computer Science, University of Bristol, Bristol, U.K.
Xianghua Xie
Department of Computer Science, University of Wales Swansea, Swansea, U.K.
Majid Mirmehdi, Neill Campbell
Department of Computer Science, University of Bristol, Bristol, U.K.
Keywords:
Uncategorised object detection, Stereo depth, Assisted blind navigation, Sparse optical flow.
Abstract:
We propose a robust approach to annotating independently moving objects captured by head mounted stereo
cameras that are worn by an ambulatory (and visually impaired) user. Initially, sparse optical flow is extracted
from a single image stream, in tandem with dense depth maps. Then, using the assumption that apparent
movement generated by camera egomotion is dominant, flow corresponding to independently moving objects
(IMOs) is robustly segmented using MLESAC. Next, the mode depth of the feature points defining this flow
(the foreground) are obtained by aligning them with the depth maps. Finally, a bounding box is scaled pro-
portionally to this mode depth and robustly fit to the foreground points such that the number of inliers is
maximised.
1 INTRODUCTION
This paper describe a method for isolating and an-
notating moving objects using head mounted stereo
cameras worn by an ambulatory or stationary person.
The work is carried out in the context of a large, mul-
tifaceted and EU-funded project (CASBliP
1
) which
aims to develop a multi-sensor system capable of in-
terpreting basic characteristics of some primary ele-
ments of interest in outdoor scenes (i.e. in city streets)
and transforming them into a sound map for blind
users as a perception and navigation aid.
One of the key tasks is to effectively detect mov-
ing objects, which may pose a danger to the user,
and estimate their distance and relative motion. Un-
like, for example, in autonomous vehicle navigation
(de Souza and Kak, 2002; Leonard, 2007), where the
camera egomotion can be estimated based on aux-
iliary measurements, e.g. using speedometers, our
cameras can undergo arbitrary motion to six degree
of freedom (dof). Such egomotion introduces sig-
1
www
.casblip.upv.es
nificant relative motions for all objects in the scene,
which makes it difficult to detect independent mov-
ing objects and even more difficult in order to do so
in close to real time while simultaneously estimating
the depth. Fortunately, since the speed of the user is
much slower than that of the objects of interest, such
as a car, the translational component of the egomo-
tion can be neglected. Moreover, the user will be
aware of their own cadence and trajectory, thus ac-
curate estimates of true camera egomotion are unnec-
essary. However, it is still challenging to efficiently
differentiate apparent motions induced in the scene
by camera movement from that originating from real
movement in the environment.
Pauwels and Hulle (Pauwels and Hulle, 2004)
propose a M-estimator based robust approach to ex-
tracting egomotion from noisy optical flow. Tracked
points whose trajectory do not originate in the focus
of expansion (FOE) are deemed to belong to indepen-
dently moving objects. This assumption fails for ob-
jects traveling in front of the camera towards the FOE.
In (Badino, 2004), a method for deducing egomotion
in a moving vehicle using a mobile stereo platform
450
Hannuna S., Xie X., Mirmehdi M. and Campbell N. (2009).
GENERIC MOTION BASED OBJECT SEGMENTATION FOR ASSISTED NAVIGATION.
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications , pages 450-457
DOI: 10.5220/0001785704500457
Copyright
c
SciTePress

is described. They utilise a combination of 3D point
correspondences, and a smoothness of motion con-
straint to deduce vehicle motion. In (Ess et al., 2007),
the ground plane and pedestrians are simultaneously
extracted using stereo cameras mounted on a trolley.
Although they show impressive results, appearance
based detection is not sufficient enough for the pur-
poses of our application. Other work that deal with
the problem of segmenting independent motion with
camera egomotion include (Rabe et al., 2007), (Yuan
et al., 2007) and (Yu et al., 2005).
Depth estimation or disparity computation is of-
ten carried out based on the assumption that depth
discontinuity boundaries collocate with intensity or
colour discontinuity boundaries. The search for this
collocation is based on intensity similarity match-
ing from one image to the other, which includes
stages such as matching cost computation and aggre-
gation, disparity computation and refinement. Op-
timisation plays an important role in disparity esti-
mation (Gong and Yang, 2007). Recent comparative
studies, such as (Scharstein and Szeliski, 2002), have
shown that graph cut (Veksler, 2003) and belief prop-
agation (Felzenszwalb and Huttenlocher, 2006) are
two powerful techniques to achieve accurate disparity
maps. However, both are computationally expensive
and require hardware solutions to achieve near real
time performance, e.g. (Yang et al., 2006).
In section 2, we first provide an overview of the
proposed method, and then elaborate each of its stages
in some subsections. Then, experimental results are
reported in section 3, followed with conclusion in sec-
tion 5.
2 PROPOSED APPROACH
The primary aim here with respect to generic object
detection is to identify objects moving independently
in the scene. We are not concerned with the specific
class of objects, but just to extract sufficient informa-
tion for a later cognitive module to interpret if the mo-
tion of the object can pose a danger to the visually-
impaired user. This is achieved by tracking a sparse
set of feature points, which implicitly label moving
objects, and segmenting features which exhibit mo-
tion that is not consistent with that generated by the
movement of the stereo cameras. Sparse point track-
ing has previously been applied successfully to mo-
tion based segmentation in (Hannuna, 2007). Dense
depth maps are simultaneously extracted, yielding lo-
cations and 3D trajectories for each feature point.
These depth maps are also required for input into a
later stage of the CASBliP project (the sonification
process to generate a sound map), so they do not incur
extra computational burden compared to using sparse
depth maps.
The Kanade-Lucas-Tomasi (KLT) (Shi and
Tomasi, 1994) tracker is used to generate this sparse
set of points in tandem with the depth estimation
process. This tracker preferentially annotates high
entropy regions. As well as facilitating tracking,
this also ensures that values taken from the depth
maps in the vicinity of the KLT points are likely
to be relatively reliable as it is probable that good
correspondences have been achieved for these
regions.
Points corresponding to independently moving
objects are segmented using MLESAC (Torr and Zis-
serman, 2000) (Maximum Likelihood Sample Con-
sensus), based on the assumption that apparent move-
ment generated by camera egomotion is dominant.
Outliers to this dominant motion then generally cor-
respond to independently moving objects. Bounding
boxes are fitted iteratively to the segmented points un-
der the assumption that independently moving objects
are of fixed size and at different depths in the scene.
Segmented points are aligned with depth maps to
ascertain depths for moving object annotation. The
mode depth of these points is used to scale a bounding
box which is robustly fit to the segmented points, such
that the number of inliers are maximised. To segment
more than one object, the bounding box algorithm is
reapplied to the ‘bounding box outliers’ produced in
the previous iteration. This needs to be done judi-
ciously, as these outliers may be misclassified back-
ground points that are distributed disparately in the
image. However, if a bimodal (or indeed multimodal)
distribution of foreground depths is present, objects
will be segmented in order of how numerously they
are annotated at a consistent depth. In the current real-
time implementation of the navigation system, bound-
ing boxes are only fitted to the object which is most
numerously annotated at a consistent depth. This is,
almost without exception, the nearest object. Only
processing the nearest object simplifies the sound map
provided to user, thus providing only the most rel-
evant information and making the audio feed easier
to interpret. For example, in a scene where there are
two objects present at different depths, the one with
the greater number of tracking points will be robustly
identified first, assuming both sets of tracking points
demonstrate similar variance in their depth values.
2.1 Depth Estimation
In order to estimate the distance of objects from the
user in an efficient manner, a stereo grid with two
GENERIC MOTION BASED OBJECT SEGMENTATION FOR ASSISTED NAVIGATION
451

cameras is used since it is generally faster than sin-
gle camera temporal depth estimation. The intrinsic
and extrinsic parameters of the two cameras are pre-
computed using a classic chart-based calibration tech-
nique (Zhang, 1998). Sparse depth estimation, e.g.
correlation based patch correspondence search and
reconstruction, is usually computationally efficient.
However, it is not desirable in our application since
it often results in isolated regions even though they
may belong to a single object which makes it difficult
to sonify. In recent years, there has been considerable
interest in dense depth estimation, e.g. (Scharstein
and Szeliski, 2002). We have experimented with sev-
eral methods, including belief propagation (Felzen-
szwalb and Huttenlocher, 2006), dynamic program-
ming (Birchfield and Tomasi, 1999), sum of absolute
difference with winner-take-all optimisation (Kanade,
1994), and sum of squared differences with iterative
aggregation (Zitnick and Kanade, 2000).
Although recent comparative studies, such as
(Scharstein and Szeliski, 2002), suggest that scan
line based dynamic programming does not perform as
well as more global optimisation approaches, on our
outdoor dataset it appears to be a reasonable trade-
off between computational efficiency and quality (see
subjective comparison in Fig. 2 in the Results sec-
tion). Note that our outdoor images are considerably
different from those benchmarks widely used in com-
parative studies. It is very common for our data to
contain disparities of up to 60 pixels out of 320 pixels,
which is significantly larger than most standard ones.
Additionally, the variation of disparities is large, i.e.
for most of the frames the disparity covers most lev-
els from 0 to 60. A typical dynamic programming
approach is the scanline-based 1D optimisation pro-
cess. We follow (Birchfield and Tomasi, 1999) to de-
fine the cost function to minimise while matching two
scanlines as:
γ = N
o
κ
o
− N
m
κ
r
+
∑
i
d(x
i
, y
i
), (1)
where N
o
and N
m
are the number of occlusions and
matches respectively, κ
o
and κ
r
are weightings for
occlusion penalty and match reward respectively, and
function d(.) measures the dissimilarity between two
pixels x
i
and y
i
. For this dissimilarity measure, one
that is insensitive to image sampling is used:
d(x
i
, y
i
) = min
©
¯
d(x
i
, y
i
, I
L
, I
R
),
¯
d(y
i
, x
i
, I
R
, I
L
)
ª
, (2)
where
¯
dis defined as:
¯
d(x
i
, y
i
, I
L
, I
R
) = min
(y
i
−
1
2
)≤y≤(y
i
−
1
2
)
|I
L
(x
i
) −
ˆ
I
R
(y)|, (3)
where I
L
(x
i
) and I
R
(y
i
) are intensity values for x
i
in
the left scanline and y
i
in the right scanline respec-
tively, and
ˆ
I
R
is the linearly interpolated function be-
tween the sample points of the right scanline. The
Figure 1: Fusion of depth map with image segmentation.
1st row: the original left image and graph cut based seg-
mentation using colour and raw depth information; 2nd
row: original depth estimation and result after anisotropic
smoothing based on segmentation.
matching is also subject to a set of constraints, such
as unique and ordering constraint which simplifies dy-
namic programming, and ‘sided’ occlusion constraint
to handle untextured areas. For further details, the
reader is refered to (Birchfield and Tomasi, 1999).
However, due to the nature of the 1D optimi-
sation, streaking artifacts inevitably result, as well
as temporal inconsistency, known as flicking effects.
Since the stereo cameras are constantly moving and
the scene often contains moving and deforming ob-
jects, enforcing temporal consistency does not nec-
essarily improve results. A median filter across the
scan lines is used to reduce the spatial inconsistency.
More advanced approaches, such as (Bobick and In-
tille, 1999), can be used, however, at a computational
cost we can not afford. Others, such as (Gong and
Yang, 2007), require dedicated hardware solutions.
We also adopt a fusion approach using image seg-
mentation based on the assumption that depth dis-
continuity often collocates with discontinuity in re-
gional statistics. Similar ideas have been recently ex-
plored, e.g. (Zitnick and Kang, 2007). However,
we use a post-fusion approach instead of depth esti-
mation from over-segmentation
2
. Smoothing is per-
formed within each region to avoid smudging across
the region boundaries. An example result is shown
in Fig. 1. This segmentation is based on graph cuts
(Felzenszwalb and Huttenlocher, 2004), which offers
the potential of multimodal fusion of depth, colour
components and sparse optical flow to obtain more
2
Image segmentation is also required as part of a sub-
system in our CASBliP project, not discussed in this paper,
for assistance to partially sighted users. Hence, the com-
putational overhead of fusing depth information and image
segmentation is affordable.
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
452
coherent segmentation. We are currently also in-
vestigating Mean Shift segmentation (Comaniciu and
Meer, 2002) to determine if a faster throughput can be
achieved without compromising accuracy.
2.2 Deducing Background Motion
Model
To determine the motion of an object of interest, we
use a robust approach to first determine which KLT
points correspond to the background region. Specifi-
cally, homography is repeatedly used to parameterise
a provisional model based on the trajectory of a subset
of randomly selected points over a sliding temporal
window and the most likely model retained. Outliers
to the most likely model correspond to independently
moving object annotation.
The robust technique used here is MLESAC (Torr
and Zisserman, 2000) and is outlined in Algorithm 1.
This method attempts to determine the parameters of
the background’s motion model, using the smallest
possible subset of that data. Samples are drawn ran-
domly and used to generate a provisional model. The
most likely parameter vector, assuming the outliers
are randomly distributed, is retained. For each provi-
sional model, it is necessary to iteratively determine
the mixing parameter, γ, (expected proportion of in-
liers), which yields the highest likelihood. Our use of
MLESAC as opposed to RANSAC (random sample
consensus) (Fischler and Bolles, 1981) is more ex-
pensive, but avoids the need for a predefined inlier
threshold when determining a consensus.
Algorithm 1 Robustly identifying dominant model.
X
i
represents the KLT points for the current frame
WinDiam represens the radius of the sliding temporal
window
X
t
i
represents the subset of X
i
, tracked successfully for
current temporal window
M
prov
represents the current model
M
best
represents the best model
N is the number of samples required for dominant model
to be selected with 0.95 probability
Identify X
t
i
for j ← 1..N do
Randomly select s samples, X
s
i
from X
t
i
Calculate M
prov
, using X
s
i−WinDiam
and X
s
i
Evaluate the likelihood, L
prov
, for M
prov
if L
prov
> L
best
then
L
best
← L
prov
M
best
← M
prov
Record outliers associated with M
best
end if
end for
Record M
best
and its’ associated outliers
With regard to model parametrization, the direct
linear transformation (DLT) may be used to calcu-
late a matrix, H, which transforms a set of points x
i
from one image to a set of corresponding points x
0
i
in another image. In order to fully constrain H, four
point correspondences are required (Hartley and Zis-
serman, 2001) (which are not collinear). If the four
points selected are background points, then the trans-
formation matrix deduced will describe the motion of
the background. The transformation
x
0
i
= Hx
i
, (4)
can also be expressed in the form:
x
0
i
× Hx
i
= 0, (5)
where × is the vector cross product. If the j-th
row of the matrix H is represented by h
jT
and x
0
i
=
(x
0
i
, y
0
i
, w
0
i
)
T
, this may be simplified to:
µ
0
T
−w
0
i
x
T
i
y
0
i
x
T
i
w
0
i
x
T
i
0
T
−x
0
i
x
T
i
¶
| {z }
A
i
h
1
h
2
h
3
= 0. (6)
Decomposing A, with SVD, produces the follow-
ing factorization:
A = UDV
T
. (7)
The columns of V, whose corresponding elements
in D are zero, form an orthonormal basis for the
nullspace of H (Press et al., 1992). In other words,
they provide a value for h, which satisfies Ah = 0.
2.3 Fitting a Bounding Box
We assume that the outliers to the background model
primarily represent the foreground object. The di-
mensions of the bounding box are determined by mul-
tiplying the foreground points’ mode depth by a scal-
ing factor which has been empirically determined. We
utilise the mode, as opposed to the mean, as it is more
robust to outliers and allows the possibility of isolat-
ing more than one object if the objects’ depths corre-
spond to a multimodal distribution.
The box is fitted to the foreground points using
RANSAC as summarised in Algorithm 2. For every
frame, the object’s centroid is estimated using three
randomly selected foreground points. The bounding
box is then fitted to the foreground points, based on
this estimation and the number of points lying within
the bounding box. It is appropriate to use RANSAC in
this case as the threshold is determined by the bound-
ing box size.
It would be possible to simply use a single fore-
ground point to estimate the object’s centroid, but us-
ing a greater number allows for more variety in the
GENERIC MOTION BASED OBJECT SEGMENTATION FOR ASSISTED NAVIGATION
453

Figure 2: 1st row: stereo images and depth estimation based on dynamic programming using 1D optimisation; 2nd row:
results obtained from belief propagation, sum of absolute differences with winner-take-all optimisation, and sum of squared
differences with iterative aggregation.
Algorithm 2 Robustly bounding fitting.
X
out
represents the KLT points which are outliers to the
dominant model, M
best
CoG
prov
represents the current centroid for the bounding
box
CoG
best
represents the centroid yielding the greatest
number of inliers
N is the number of samples required for dominant model
to be selected with 0.95 probability
Calculate mode depth of X
out
Scale bounding box size proportionally to mode depth
and weighted average of centroid estimations for previ-
ous frames.
for j ← 1..N do
Select s random samples, X
s
out
from X
out
Calculate CoG
prov
: the centroid of X
s
out
Count the number of inliers ρ
prov
, for CoG
prov
if ρ
prov
> ρ
best
then
ρ
best
← ρ
prov
CoG
best
← ρ
prov
end if
end for
Use weighted average of CoG
best
and previous estima-
tions and record associated inliers
centroid’s position. However, using more points re-
quires more iterations in the RANSAC algorithm, so
3 are selected as a compromise. The bounding box’s
size and location tends to jitter due to the random
sampling and inconsistency with regard to features
annotated by the KLT tracker. Hence both quantities
are smoothed by utilising a weighted average of their
current and previous values.
In addition to fitting a bounding box to the anno-
tation, aligning KLT points with depth maps can gen-
erate relative velocity estimates as motion in the im-
age plane may be scaled according to the moving ob-
jects distance to that plane. Furthermore, it could po-
tentially allow the system to determine if objects are
approaching the user. Alignment is relatively simple
since as the cameras are calibrated, the original im-
ages and the depth maps can be rectified and aligned
based on calibration parameters.
3 RESULTS
In Fig. 2 we illustrate a comparison of several depth
estimation techniques, e.g. belief propagation, sum
of absolute differences with winner-take-all optimi-
sation, and sum of squared differences with iterative
aggregation. We selected the method presented in
(Birchfield and Tomasi, 1999) for reasonable accu-
racy as a trade-off for computational efficiency for
reasons as described in section 2.1.
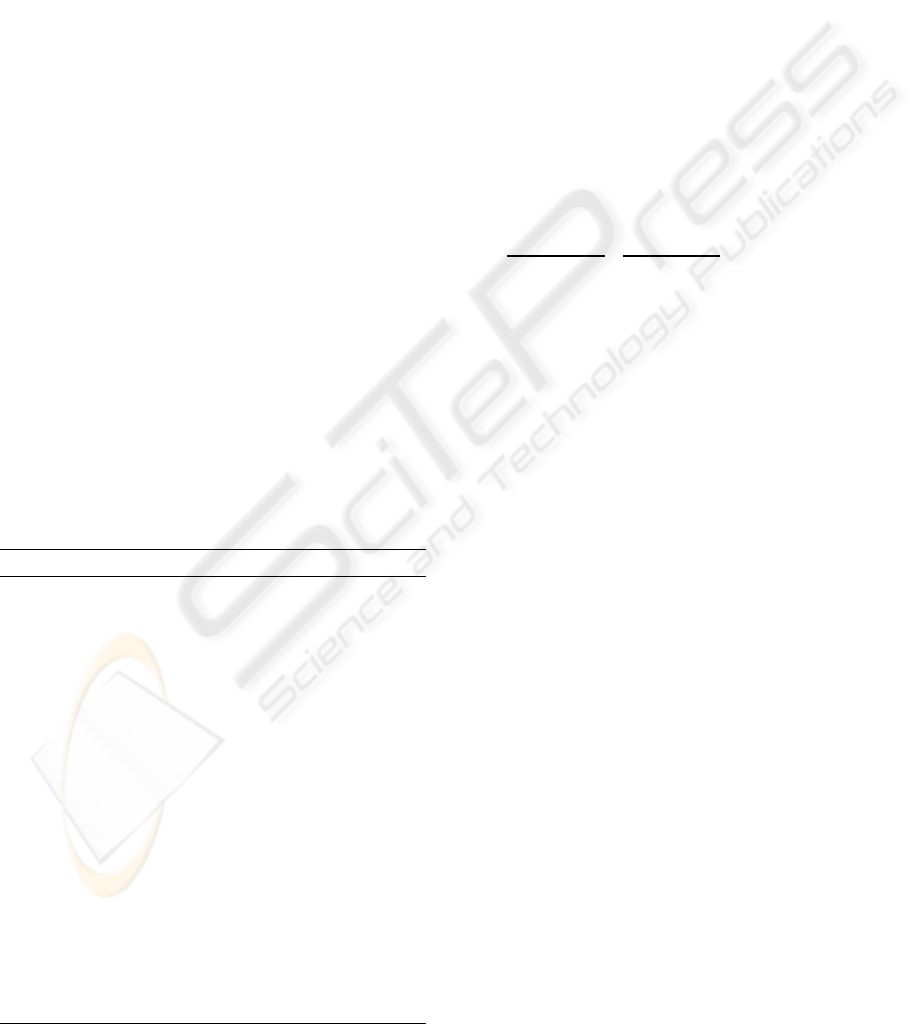
Fig. 3 illustrates the annotation and bounding box
fitting process. From left to right the images show:
the KLT points, the points segmented into domi-
nant motion (red) and outliers (blue), the depth map
aligned with these segmented points, with bounding
box fitted and the right shows the final annotation.
Note that the depth map is smaller as it only includes
portions of the scene captured by both cameras. This
process is also illustrated in Fig. 4. Note that depth
maps are produced concurrently with the sparse point
segmentation.
Figures 5, 6 and 7 are examples of the algorithm’s
output. In each figure every fourth frame is shown
starting top left and finishing bottom right. Pairs of
images represent each frame of the sequence with the
upper image illustrating the segmentation and depth
maps and the lower the final annotation.
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
454
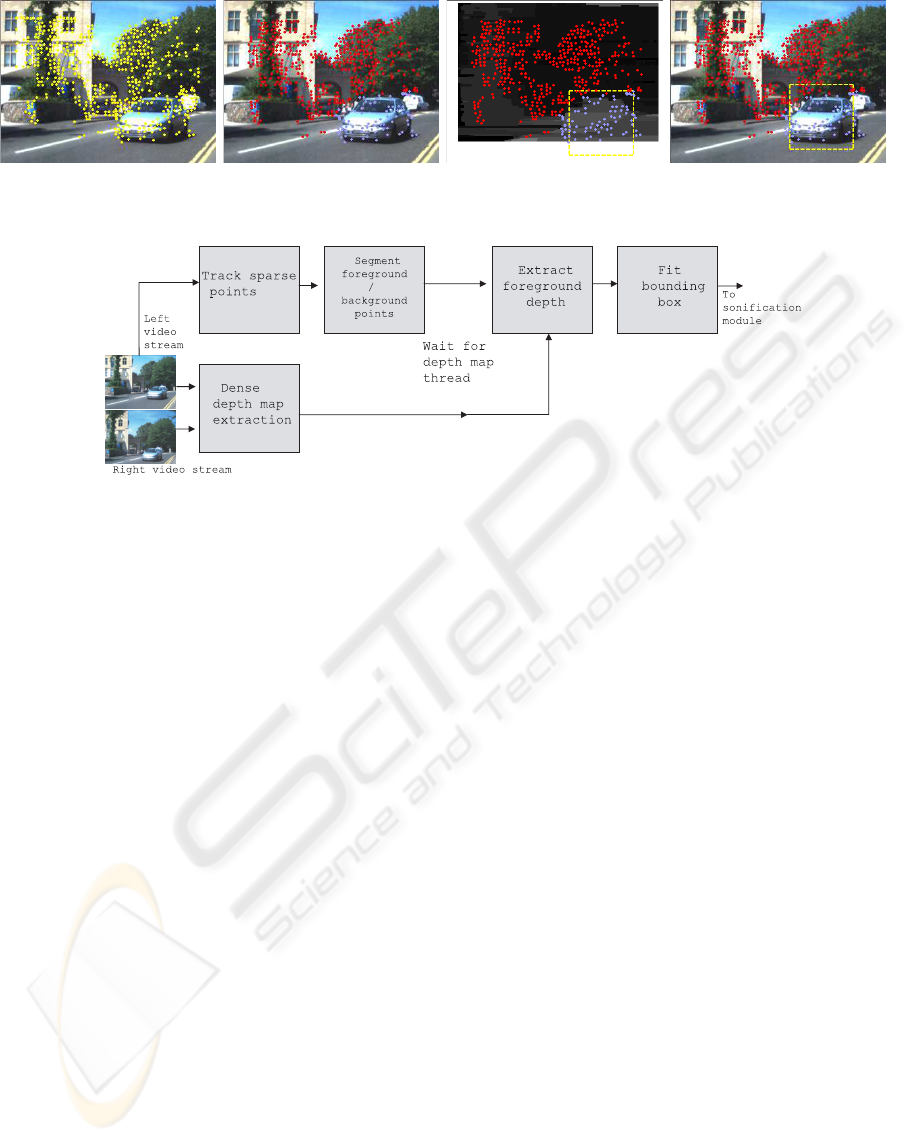
Figure 3: Left to right: sparse point tracking, foreground background segmentation and alignment with depth map, and final
annotation.
Figure 4: Flow chart illustrating bounding box algorithm and relationship with depth map extraction.
4 DISCUSSION
The system currently runs at a rate of around 8fps
on a 2.39GHz laptop with 3GB RAM working on
320 × 240 images, when dealing with a single dom-
inant object only; hence further refinement is neces-
sary to be able to handle multiple objects in real-time.
We have come across no previous works with sim-
ilar setups to ours, which deal with hazard detection in
the outdoors using wearable cameras for blind users,
to compare our results with. There are other works
with a similar application in mind, e.g.: (Andersen
and Seibel, 2001) in which a system is very briefly
described for users with low vision, rather than no vi-
sion at all, thus relying on some user ability to see and
interpret the scene; and (Wilson et al., 2007) in which
a tactile-input wearable audio system is described.
Also, comparisons are not easy to establish as other
systems have proprietary software and hardware or
require significant software redevelopment. There are
also advanced works on pedestrian detection or vehi-
cle detection, but these are mainly highly fine-tuned
towards those specific classes of objects, whereas our
work is simply looking for any unspecified moving
objects in the scene to report audio warnings to blind
users. Furthermore, our system is designed to be lib-
eral in determining hazardous objects as it is impor-
tant to report a safe object as unsafe, than vice versa.
Hence, it is deemed reasonable for our bounding box
to be larger and a less accurate tight fit.
5 CONCLUSIONS
A robust approach to annotating independently mov-
ing objects using head mounted stereo cameras has
been proposed. This is intended for use as part of an
audio-feedback system for reporting potentially haz-
ardous objects to a blind user navigating in outdoor
cityscape settings. Generic object detection is per-
formed, without any specific object classification, to
ensure fast enough performance to allow practicality
of use. The system offers near real-time performance
and is robust enough to tolerate the unpredictable mo-
tions associated with head mounted stereo cameras.
Future work will focus on improving performance us-
ing accelerated feature tracking on the GPU.
ACKNOWLEDGEMENTS
This work was funded by EU-FP6 Project CASBliP
no. 027083 FP6-2004-IST-4.
REFERENCES
Andersen, J. and Seibel, E. (2001). Real-time hazard detec-
tion via machine vision for wearable low vision aids.
In ISWC ’01: Proceedings of the 5th IEEE Interna-
tional Symposium on Wearable Computers, page 182.
IEEE Computer Society.
GENERIC MOTION BASED OBJECT SEGMENTATION FOR ASSISTED NAVIGATION
455

Badino, H. (2004). A robust approach for ego-motion es-
timation using a mobile stereo platform. In 1st In-
ternation Workshop on Complex Motion (IWCM04),
volume 3417, pages 198–208.
Birchfield, S. and Tomasi, C. (1999). Depth discontinu-
ities by pixel-to-pixel stereo. Int. J. Comput. Vision,
35(3):269–293.
Bobick, A. and Intille, S. (1999). Large occlusion stereo.
Int. J. Comput. Vision, 33(3):181–200.
Comaniciu, D. and Meer, P. (2002). Mean shift: a robust
approach toward feature space analysis. IEEE Trans.
PAMI, 24(5):603–619.
de Souza, G. and Kak, A. (2002). Vision for mobile robot
navigation: A survey. 24(2):237–267.
Ess, A., Leibe, B., and van Gool, L. (2007). Depth and ap-
pearance for mobile scene analysis. In ICCV07, pages
1–8.
Felzenszwalb, P. F. and Huttenlocher, D. P. (2004). Efficient
graph-based image segmentation. Int. J. Comput. Vi-
sion, 59(2):167–181.
Felzenszwalb, P. F. and Huttenlocher, D. P. (2006). Efficient
belief propagation for early vision. Int. J. Comput.
Vision, 70(1):41–54.
Fischler, M. A. and Bolles, R. C. (1981). Random sample
consensus: a paradigm for model fitting with appli-
cations to image analysis and automated cartography.
Commun. ACM, 24(6):381–395.
Gong, M. and Yang, Y. (2007). Real-time stereo matching
using orthogonal reliability-based dynamic program-
ming. IEEE Trans. Image Processing, 16(3):879–884.
Hannuna, S. (2007). Quadruped Gait Detection in Low
Quality Wildlife Video. PhD thesis, University of Bris-
tol. Supervisor-Neill Campbell.
Hartley, R. I. and Zisserman, A. (2001). Multiple View Ge-
ometry in Computer Vision. Cambridge University
Press, ISBN: 0521623049.
Kanade, T. (1994). Development of a video-rate stereo ma-
chine. In Image Understanding Workshop, pages 549–
9557.
Leonard, J. (2007). Challenges for autonomous mobile
robots. pages 4–4.
Pauwels, K. and Hulle, M. M. V. (2004). Segmenting inde-
pendently moving objects from egomotion flow fields.
In Proc. Early Cognitive Vision Workshop.
Press, W. H., Teukolsky, S. A., Vetterling, W. T., and Flan-
nery, B. P. (1992). Numerical Recipes in C: The Art
of Scientific Computing. Cambridge University Press,
New York, NY, USA.
Rabe, C., Franke, U., and Gehrig, S. (2007). Fast detection
of moving objects in complex scenarios. Intelligent
Vehicles Symposium, 2007 IEEE., pages 398–403.
Scharstein, D. and Szeliski, R. (2002). A taxonomy and
evaluation of dense two-frame stereo correspondence
algorithms. Int. J. Comput. Vision, 47(1-3):7–42.
Shi, J. and Tomasi, C. (1994). Good features to track.
In IEEE Conference on Computer Vision and Pattern
Recognition (CVPR’94), Seattle.
Torr, P. and Zisserman, A. (2000). Mlesac: A new ro-
bust estimator with application to estimating image
geometry. Computer Vision and Image Understand-
ing, 78:138–156.
Veksler, O. (2003). Extracting dense features for visual cor-
respondence with graph cuts. In IEEE CVPR, pages –.
Wilson, J., Walker, B., Lindsay, J., and Dellaert, F. (2007).
Swan: System for wearable audio navigation.
Yang, Q., Wang, L., Yang, R., Wang, S., Liao, M., and Nis-
ter, D. (2006). Real-time global stereo matching using
hierarchical belief propagation. In BMVC, pages –.
Yu, Q., Ara
´
ujo, H., and Wang, H. (2005). A stereovision
method for obstacle detection and tracking in non-flat
urban environments. Auton. Robots, 19(2):141–157.
Yuan, C., Medioni, G. G., Kang, J., and Cohen, I. (2007).
Detecting motion regions in the presence of a strong
parallax from a moving camera by multiview geomet-
ric constraints. IEEE Trans. Pattern Anal. Mach. In-
tell., 29(9):1627–1641.
Zhang, Z. (1998). Determining the epipolar geometry and
its uncertainty: A review. Int. J. Comput. Vision,
27(2):161–195.
Zitnick, C. and Kanade, T. (2000). A cooperative algorithm
for stereo matching and occlusion detection. IEEE
Trans. PAMI, 22(7):675–684.
Zitnick, C. and Kang, S. (2007). Stereo for image-based
rendering using image over-segmentation. Int. J.
Comput. Vision, 75:49–65.
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
456
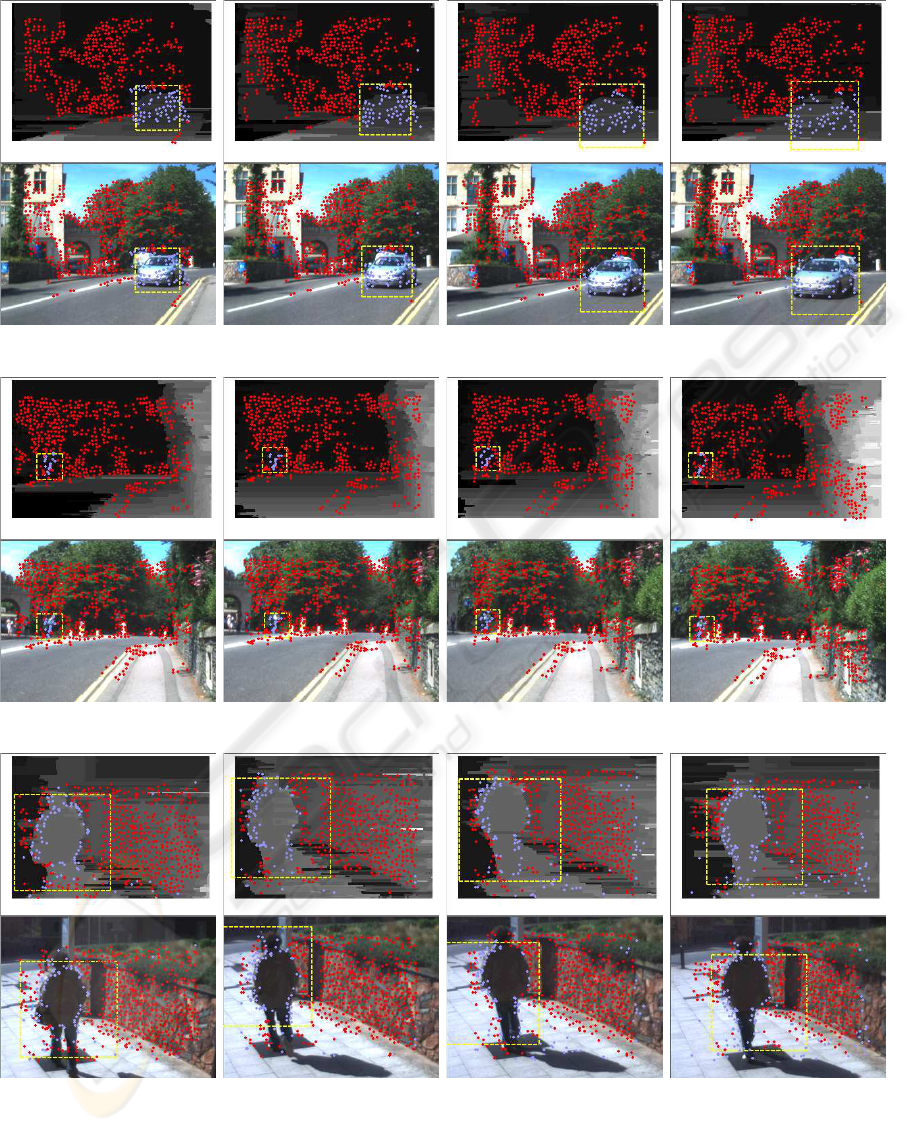
Figure 5: Every fourth frame of car approaching the cameras (depth maps and original frames are paired vertically).
Figure 6: Every fourth frame of cyclist moving away from the cameras (depth maps and original frames are paired vertically).
Figure 7: Every fourth frame of a person walking in the same direction as camera egomotion (depth maps and original frames
are paired vertically).
GENERIC MOTION BASED OBJECT SEGMENTATION FOR ASSISTED NAVIGATION
457
