
EXPERIMENTAL COMPARISON OF WIDE BASELINE
CORRESPONDENCE ALGORITHMS FOR MULTI CAMERA
CALIBRATION
Ferid Bajramovic, Michael Koch and Joachim Denzler
Chair for Computer Vision, Friedrich Schiller University of Jena, Ernst-Abbe-Platz 2, 07743 Jena, Germany
Keywords:
Correspondence, Calibration, Structure-from-motion, Uncertainty.
Abstract:
The quality of point correspondences is crucial for the successful application of multi camera self-calibration
procedures. There are several interest point detectors, local descriptors and matching algorithms, which can
be combined almost arbitrarily. In this paper, we compare the point correspondences produced by several such
combinations. In contrast to previous comparisons, we evaluate the correspondences based on the accuracy of
relative pose estimation and multi camera calibration.
1 INTRODUCTION
Calibration is an important prerequisite for many ap-
plications of multi camera systems. The most conve-
nient, but also the most challenging class of calibra-
tion methods uses only images from the cameras as
input—without any scene knowledge or user interac-
tion (Martinec and Pajdla, 2007; Verg´es-Llah´ı et al.,
2008; Bajramovic and Denzler, 2008). The success
of such methods crucially depends on the point cor-
respondences which are extracted from the images in
the first step.
Correspondence extraction typically consists of
three steps: detection of points (or regions) of interest,
computation of a local descriptor for each point, and
matching of the descriptors. In this paper, we exper-
imentally compare several alternative algorithms for
all three steps. Unlike other comparisons (Mikola-
jczyk et al., 2005; Mikolajczyk and Schmid, 2005),
we evaluate, how well the various correspondence
methods are suited for relative pose estimation and
multi camera calibration.
The paper is structured as follows. In Section 2,
we briefly describe the detectors, descriptors and
matching algorithms. Section 3 continues with the
geometry estimation. In section 4, we present our ex-
perimental comparison. Conclusions are given in sec-
tion 5.
2 CORRESPONDENCES
In this section, we describe the methods which extract
pairwise point correspondences from images. A point
correspondence is a pair of 2D image points in two
different images which represent the same 3D scene
point. There is a general scheme for extracting point
correspondences. The first step detects interest points
in each image. They should be invariant against dif-
ferent 3D world transformations and changes in il-
lumination, such that they can be found in different
views of the same scene. Afterwards, a descriptor
is calculated for every interest point which usually
stores information of the surrounding area of the 2D
image point. The last step consists of matching the
descriptors in order to establish correspondences be-
tween 2D points in different images.
2.1 Detectors
The detection of interest points is a wide-spread field.
In recent years, many different kinds of detectors have
been developed. The most important attribute is the
afore mentioned invariance. Most of the detectors are
invariant against rotation, translation and scale. We
base our selection on the work of Mikolajczyk et al.
(Mikolajczyk et al., 2005; Mikolajczyk and Schmid,
2005).
458
Bajramovic F., Koch M. and Denzler J. (2009).
EXPERIMENTAL COMPARISON OF WIDE BASELINE CORRESPONDENCE ALGORITHMS FOR MULTI CAMERA CALIBRATION.
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications, pages 458-463
DOI: 10.5220/0001786004580463
Copyright
c
SciTePress

2.1.1 Harris-Laplace
The Harris-Laplace (HarLap) detector (Mikolajczyk
and Schmid, 2002) is based on the Harris-Stephens
corner detector (Harris and Stephens, 1988). In addi-
tion, it uses a Gaussian scale space to achieve scale in-
variance. Hence, the second moment matrix becomes:
S = σ
2
D
· g(σ
I
)∗
I
2
x
(x, σ
D
) I
x
I
y
(x, σ
D
)
I
x
I
y
(x, σ
D
) I
2
y
(x, σ
D
)
!
. (1)
The variable σ
I
indicates the scale space kernel and
σ
D
designates the Gaussian smoothing kernel of the
Gaussian function g. I
x
(x, σ
D
) and I
y
(x, σ
D
) define
the smoothed derivatives in the corresponding image
directions. The Harris-Stephens corner detector is ap-
plied to different scales and a specific scale is chosen
by an iterative algorithm (Lindeberg, 1998). After-
wards, the interest points are selected according to the
“cornerness” c = det(S)− α · trace
2
(S). The constant α
is usually set to 0.04.
2.1.2 Hessian-Laplace
For the Hessian-Laplace (HesLap) detector (Mikola-
jczyk et al., 2005) the second moment matrix is re-
placed by the Hessian. Points which are local extrema
of both, the determinant and the trace of the Hessian,
are selected as interest points.
2.1.3 Affine Regions
The affi ne region detectors (HarAff, HesAff) extend
the Harris-Laplace and Hessian-Laplace detectors
by an iterative algorithm (Mikolajczyk and Schmid,
2002) which computes the second-moment matrix or
the Hessian matrix, respectively, which transforms the
anisotropic region into a normalized region.
2.1.4 Difference of Gaussian
The difference of Gaussian (DOG) detector described
by Lowe (Lowe, 2004) uses a difference of Gaussian
scale space to detect interest points. The main aspect
is the scale invariance of the keypoints. The problem
of the strong response to edges is solved by using the
Harris-Stephens detector (Harris and Stephens, 1988)
to suppress unstable keypoints along edges.
2.1.5 Intensity based Regions
The intensity based regions (IBR) detector (Tuyte-
laars and van Gool, 2000) uses only the image in-
tensity information. First, local extrema in the image
are detected using non-maximum suppression. After-
wards, the developing of the intensity values on rays
with different angles starting from the extremum is
analyzed. On each ray, one local extremum of a spe-
cial intensity function is computed. Those are used to
fit an ellipse to get a region which is invariant against
affine transformations and additive illumination.
2.2 Descriptors
Next, we will introduce the descriptors used in our
comparison. As mentioned before, they attempt to
describe the interest points as invariantly as possible
based on the image information.
2.2.1 SIFT
The scale invariant feature transform (SIFT) descrip-
tor was first described by Lowe (Lowe, 2004). It gen-
erates a special gradient histogram as a vector of 128
entries from the area around the interest point.
2.2.2 Gradient Location and Orientation
Histogram
Gradient Location and Orientation Histogram
(GLOH) (Mikolajczyk and Schmid, 2005) is an
extension of SIFT. It computes the SIFT descriptor
on a log-polar location grid with different radial
and angular directions in a total of 17 parameters
for location. Gradient orientations are quantized to
16 values. The dimension of the resulting vector is
reduced from 272 to 128 by principal component
analysis (PCA).
2.2.3 Steerable Filters
Steerable filters (JLA) use derivatives computed by
convolution with Gaussian derivatives using σ = 6.7
(Freeman and Adelson, 1991) for an image patch.
The derivatives are calculated up to fourth order and
the resulting descriptor has dimension 14.
2.2.4 Moments
Moment invariants (MOM) (van Gool et al., 1996) de-
scribe the intensity and shape distribution information
surrounding a keypoint (image region Ω). They are
defined by M
ad
pq
=
R R
Ω
u
p
v
p
(
I
d
(u, v)
)
a
dudv with order
p+ q and degree a using image gradients I
d
in x and y
direction (d ∈ {x, y}). The invariant moments are com-
puted up to second order and second degree. Hence,
the resulting descriptor has dimension 20.
EXPERIMENTAL COMPARISON OF WIDE BASELINE CORRESPONDENCE ALGORITHMS FOR MULTI
CAMERA CALIBRATION
459

2.3 Matching
After computing the sets of descriptors A and B for
all interest points in two images, we compute corre-
spondences as a subset of C = A × B. We limit the
number of correspondences to 100 in each image pair.
2.3.1 Exhaustive Search
The exhaustive search (ES) matching builds a matrix
D which consists of the distance measures between
the descriptors for each element of C with
D = (d
ij
), d
ij
= dist(a
i
, b
j
), a
i
∈ A and b
j
∈ B. (2)
Normally, the distance measure dist is Euclidean.
Point correspondences are selected by choosing the
k interest points with minimum descriptor distances
incrementally according to the uniqueness constraint.
2.3.2 Nearest Neighbor Matching
In the first step of nearest neighbor (NN) matching, a
set of correspondence candidates is constructed. Each
element of the descriptor set B is assigned to the near-
est neighbor in A. The second step is identical to
exhaustive search. From the intial set, the best k cor-
respondencesare selected incrementally enforcing the
uniqueness constraint. The main difference to exhaus-
tive search can be interpreted as considering only part
of the matrix D for the final selection.
2.3.3 Two Nearest Neighbor Matching
Two nearest neighbor (2NN) is an extension of near-
est neighbor matching described by (Lowe, 2004)
aimed at removing ambiguous matchings. When
matching a given descriptor in B to its nearest neigh-
bor in A, we also compute the distance to the second
nearest neighbor. A candidate match is only estab-
lished if the ratio of the two distances is below a cer-
tain threshold (typically 0.8).
2.3.4 K-Hungarian Matching
The Hungarian (Hun) method is used for “minimum
weight” bipartite graph matching. It is also applica-
ble for matching point correspondences as shown by
Keysers et al. (Keysers et al., 2004). In this context,
the interest points in two images become the vertices
of the complete bipartite graph. The edge weights are
given by the distance between the descriptors of the
two points. The Hungarian matching computes the
optimal solution in the sense of least summed descrip-
tor distance of all point correspondences.
The problem of this method are the high com-
putational costs of O(m
2
n
2
) with m = |A| and n =
|B|. Hence, we propose the following approxima-
tion which consists of reducing the number of interest
points and thus vertices in the bipartite graph. We first
calculate l < min(m, n) initial correspondences
ˆ
C ⊆ C
using another method that needs less time than the
Hungarian method. In the experiments, we use ex-
haustive search.
The set
ˆ
C induces a subset of l interest points in
each image:
ˆ
A ⊆ A and
ˆ
B ⊆ B. The subset
ˆ
A
k
of in-
terest points in the first image used for the Hungarian
method is computed incrementally as follows: begin
with
ˆ
A and for each point p ∈
ˆ
B, add the k nearest
neighbors within A \
ˆ
A
k
. The subset
ˆ
B
k
is defined
accordingly. The number of vertices in the result-
ing complete bipartite graph is at most 2l(k + 1). Ap-
plying the Hungarian method to it produces at most
l(k+ 1) correspondences. The exact number of corre-
spondences can vary greatly.
The total runtime of our approximate Hungarian
matching consists of the initial extraction of l corre-
spondences, building the reduced bipartite graph and
applying the Hungarian method. The complexity of
the last step will typically dominate the whole algo-
rithm and is O((l· (k+ 1))
4
).
3 CALIBRATION
Given a set of cameras with known intrinsic param-
eters, we want to estimate the extrinsic parameters
up to a similarity transformation. We use our pro-
cedure described in (Bajramovic and Denzler, 2008).
We first estimate pairwise relative poses, which are
subsequently composed to absolute poses. We will
briefly describe both steps in this section. For details,
the reader is referred to the afore mentioned paper.
3.1 Relative Pose Estimation
We use the five point algorithm (Stew´enius et al.,
2006; Br¨uckner et al., 2008) to estimate relative poses
(up to scale) between camera pairs with sufficiently
many point correspondences and known intrinsic pa-
rameters. As the point correspondences must be ex-
pected to contain false matches (outliers), we embed
the five point algorithm into a robust sampling al-
gorithm (Bajramovic and Denzler, 2008; Engels and
Nist´er, 2005) similar to the RANSAC (Fischler and
Bolles, 1981) variant MLESAC (Torr and Zisserman,
2000). There are two differences to RANSAC:
1. Instead of computing a support set, a probabil-
ity density function p(R, t | D) is evaluated for
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
460

each hypothesis (R, t) with regard to all corre-
spondences D. I.e. the sampling process approxi-
mates argmax
R,t
p(R, t | D). Outliers are incorpo-
rated by using the Blake-Zisserman distribution.
2. A discrete approximation to p(t | D) is built dur-
ing the iteration. Its entropy is used as an un-
certainty measure w(
ˆ
R,
ˆ
t) for the resulting relative
pose estimate (
ˆ
R,
ˆ
t).
3.2 Multi Camera Calibration
We (Bajramovic and Denzler, 2008) compose relative
poses to absolute ones by first estimating the unknown
scale factors in the estimated relative poses (up to a
common unknown scale factor) and then concatenat-
ing the later. The procedure can be formalized by us-
ing the camera dependency graph which consists of a
vertex for each camera and an edge for each known
relative pose. We use triangulation to estimate the
scale factors and hence have to work on triangles in
the graph. As triangulation only eliminates two out
of three unknown scale factors, we arbitrarily choose
one of the scale factors in the first triangle and subse-
quently propagate scale factors from triangle to trian-
gle. Moving from triangle to triangle can be expressed
as traversing an auxiliary graph which represents the
triangles as vertices.
As only a subset of relative poses is actually re-
quired for that process, the traversal order implies a
selection of relative poses. We use the uncertainty
measures computed during relative pose estimation to
guide that selection. The main idea consists of inter-
preting the uncertainties as edge weights in the cam-
era dependency graph and calibrating along a set of
shortest triangle paths. Algorithmically, such paths
are computed by applying Dijkstra to an extension
of the triangle graph. Using shortest triangle paths
is equivalent to selecting the subset of relative poses
with minimum total uncertainty.
4 EXPERIMENTS
We use two different experimental setups. The first
one consists of two AVT Marlin monochrome cam-
eras and six AVT Pike color cameras observing a
scene, as depicted in Figure 1. We estimate the intrin-
sic camera parameters using Zhang’s (Zhang, 2000)
calibration pattern based method. To be able to eval-
uate our calibration results, we use Zhang’s method
also to compute a “ground truth” for the extrinsic cal-
ibration. Note that this “ground truth” is not free of
errors, but still provides a reasonable comparison. For
the second experiment, we use a robot arm to move a
Sony DFW-VL500 camera to 15 different poses. The
arm provides us with reliable ground truth poses.
We use the detectors and descriptors implementa-
tion of Mikolajczyk et al. (Mikolajczyk et al., 2005;
Mikolajczyk and Schmid, 2005) except for IBR. For
the DOG-SIFT combination, we alternatively also use
the SIFT++ implementation (Vedaldi, 2007).
4.1 Error Measures
In order to measure the accuracy of relative pose es-
timates, we compare the estimated translation vector
to the ground truth. As the scale and sign are un-
determined, we use the angle in degree between the
two vectors ignoring direction, i.e. the error is at most
90
◦
. Each experiment is repeated 10 times, as the re-
sults depend on random sampling. The accuracy of
relative pose estimates is evaluated using all images
pairs and all repetitions.
In order to evaluate a multi camera calibration, it
first has to be registered with the ground truth to com-
pensate for the undetermined similarity transforma-
tion. We use a randomized least median of squares
estimator based on a nonlinear registration algorithm
with linear initialization. We take the median distance
between calibrated and ground truth camera positions
as error measure for the multi camera calibration. The
scale of the error measure is determined by the scale
of the ground truth, which is normalized such that the
first two cameras have distance 100.
4.2 Results
First, we analyze the matching algorithms and then
compare detectors and descriptors using only the best
matching method. Figures 2 and 3 show the errors on
the relative pose estimates and the multi camera cali-
bration. The results are aggregated over all detectors
and descriptors in a boxplot (Tukey, 1977). A boxplot
contains a box depicting the 0.25 and 0.75 quantiles.
The line in the box is the median. The bars indicate
the remaining spread. Crosses are outliers.
Two nearest neighbor (2NN) gives the best results,
closely followed by nearest neighbor (NN). The high
error outliers of 2NN can be explained by the fact that
it produces no correspondences when applied to the
IBR detector. Exhaustive search (ES) shows similar
performance in the multi camera experiment, but is
considerably worse on the robot arm data. The results
for K-Hungarian (Hun) matching are quite poor.
Figures 4 and 5 show the relative pose errors
and the multi camera calibration errors, respectively,
using 2NN matching for all detector and descriptor
combinations – except for IBR, which uses NN. The
EXPERIMENTAL COMPARISON OF WIDE BASELINE CORRESPONDENCE ALGORITHMS FOR MULTI
CAMERA CALIBRATION
461
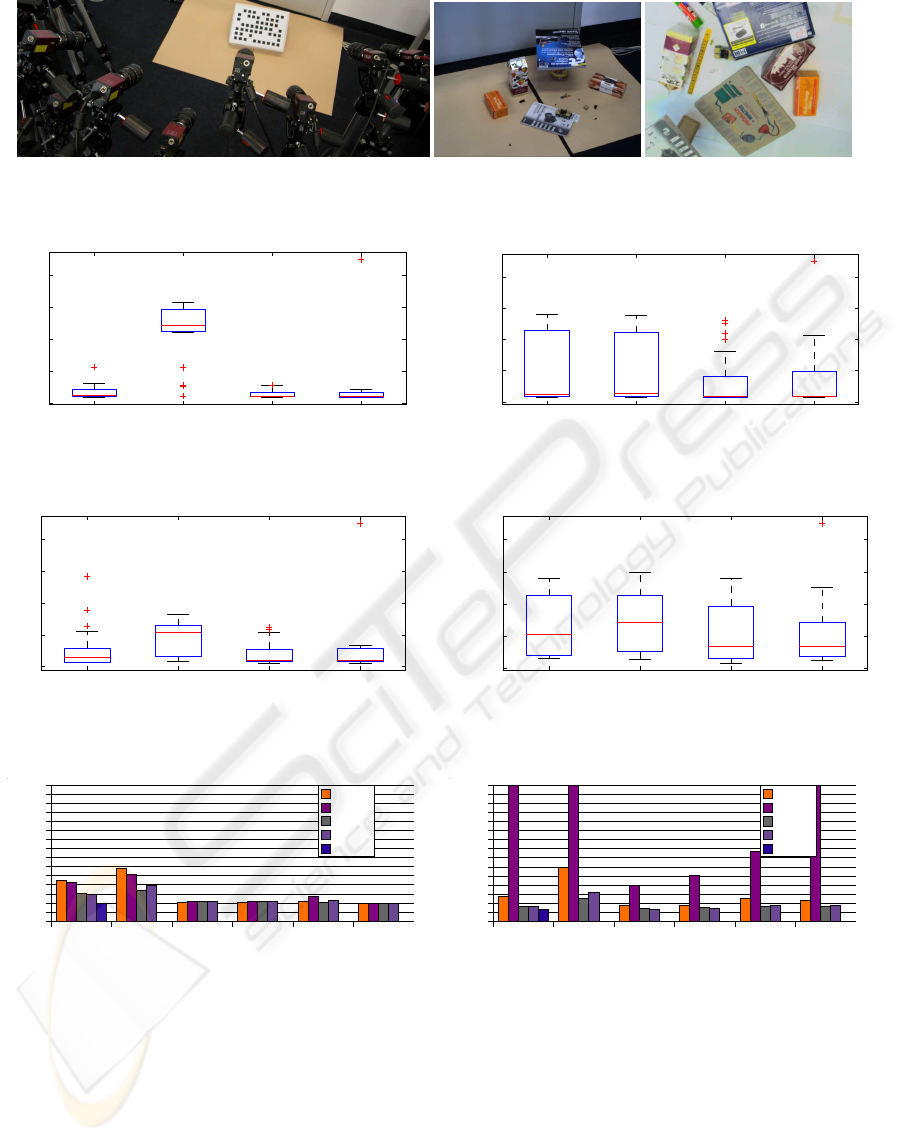
Figure 1: Experimental setups. Left: the multi camera system used in the first experiment observing the pattern for the Zhang
calibration, middle: the according scene (image from the sixth camera), right: the scene used in the robot arm experiment.
translation error in degree
ES
Hun NN 2NN
0
20
40
60
80
translation error in degree
ES
Hun NN 2NN
0
20
40
60
80
Figure 2: Relative poses: median of translation errors in degrees as a boxplot (Tukey, 1977), which is described briefly in the
text. Left: multi camera system, right: robot arm.
median position error in percent
ES
Hun
NN
2NN
0
20
40
60
80
median position error in percent
ES
Hun
NN
2NN
0
20
40
60
80
Figure 3: Multi camera calibration: median of median camera position errors in percent as a boxplot (Tukey, 1977), which is
described briefly in the text. Left: multi camera system, right: robot arm.
! !!"#
! !!"#
Figure 4: Relative poses: median of translation errors in degrees (truncated at 30) for all detectors and descriptors using
nearest neighbor matching. Left: multi camera system, right: robot arm.
Harris and Hessian detectors show the best overall
performance. The influence of the affine region exten-
sion varies. The comparatively bad results of the dif-
ference of Gaussian (DOG) detector might be imple-
mentation and parameter specific. The SIFT++ im-
plementation shows much better results. IBR is gen-
erally not very reliable. As for the descriptor, SIFT
and GLOH give the best results with no clear winner.
Steerable filters (JLA) and invariant moments (MOM)
can give similarly good results as SIFT and GLOH in
some situations, but seem to be less robust.
5 CONCLUSIONS
We performed an experimental comparison of several
interest point detectors, local descriptors and match-
ing algorithms in the context of relative pose estima-
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
462

!"! ! #"
!"! ! #"
Figure 5: Multi camera calibration: median of median camera position errors in percent (truncated at 30) for all detectors and
descriptors using nearest neighbor matching. Left: multi camera system, right: robot arm.
tion and multi camera calibration. The results con-
firmed the good performance of the SIFT descriptor.
Combined with the Harris/Hessian detectors, steer-
able filters and moment invariants could reach similar
results, but were less reliable. The GLOH extension
of SIFT did not show a pronounced improvement.
The performance of the DOG detector depended on
the implementation. The results of the SIFT++ ver-
sion were close to the Harris/Hessian detectors, which
gave the best results. As matching algorithm, two
nearest neighbor was the best choice.
REFERENCES
Bajramovic, F. and Denzler, J. (2008). Global Uncertainty-
based Selection of Relative Poses for Multi Camera
Calibration. In Proceedings of the British Machine Vi-
sion Conference (BMVC), volume 2, pages 745–754.
Br¨uckner, M., Bajramovic, F., and Denzler, J. (2008). Ex-
perimental Evaluation of Relative Pose Estimation Al-
gorithms. In Proc. of the Third International Conf. on
Computer Vision Theory and Applications (VISAPP),
volume 2, pages 431–438.
Engels, C. and Nist´er, D. (2005). Global uncertainty
in epipolar geometry via fully and partially data-
driven sampling. In ISPRS Workshop BenCOS: To-
wards Benchmarking Automated Calibration, Orien-
tation and Surface Reconstruction from Images, pages
17–22.
Fischler, M. A. and Bolles, R. C. (1981). Random sample
consensus: a paradigm for model fitting with appli-
cations to image analysis and automated cartography.
Communications of the ACM, 24(6):381–395.
Freeman, W. T. and Adelson, E. H. (1991). The design and
use of steerable filters. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 13(9):891–906.
Harris, C. and Stephens, M. J. (1988). A combined corner
and edge detector. In Proceedings of The Fourth Alvey
Vision Conference, pages 147–151.
Keysers, D., Deselaers, T., and Ney, H. (2004). Pixel-to-
pixel matching for image recognition using hungarian
graph matching. In Proceedings of the DAGM Sympo-
sium on Pattern Recognition, pages 154–162.
Lindeberg, T. (1998). Feature detection with automatic
scale selection. International Journal of Computer Vi-
sion, 30(2):79–116.
Lowe, D. G. (2004). Distinctive Image Features from Scale-
Invariant Keypoints. International Journal of Com-
puter Vision (IJCV), 60(2):91–110.
Martinec, D. and Pajdla, T. (2007). Robust Rotation and
Translation Estimation in Multiview Reconstruction.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition (CVPR), pages 1–8.
Mikolajczyk, K. and Schmid, C. (2002). An affine invari-
ant interest point detector. In Proceedings of the Eu-
ropean Conference on Computer Vision, volume 1,
pages 128–142.
Mikolajczyk, K. and Schmid, C. (2005). A perfor-
mance evaluation of local descriptors. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence,
27(10):1615–1630.
Mikolajczyk, K., Tuytelaars, T., Schmid, C., Zisserman, A.,
Matas, J., Schaffalitzky, F., Kadir, T., and van Gool,
L. (2005). A comparison of affine region detectors.
International J. of Computer Vision, 65(7):43–72.
Stew´enius, H., Engels, C., and Nist´er, D. (2006). Re-
cent Developments on Direct Relative Orientation. IS-
PRS Journal of Photogrammetry and Remote Sensing,
60(4):284–294.
Torr, P. and Zisserman, A. (2000). MLESAC: A New Ro-
bust Estimator with Application to Estimating Image
Geometry. Computer Vision and Image Understand-
ing, 78(19):138–156.
Tukey, J. W. (1977). Exploratory Data Analysis. Addison-
Wesley, Reading, MA.
Tuytelaars, T. and van Gool, L. J. (2000). Wide Baseline
Stereo Matching based on Local, Affinely Invariant
Regions. In Proceedings of the British Machine Vi-
sion Conference (BMVC), pages 412–425.
van Gool, L. J., Moons, T., and Ungureanu, D. (1996).
Affine/photometric invariants for planar intensity pat-
terns. In Proceedings of the European Conference on
Computer Vision, volume 1, pages 642–651.
Vedaldi, A. (2007). An open implementation of the SIFT
detector and descriptor. Technical Report 070012,
UCLA CSD.
Verg´es-Llah´ı, J., Moldovan, D., and Wada, T. (2008). A
new reliability measure for essential matrices suitable
in multiple view calibration. In Proc. of the Third Int.
Conf. on Comp. Vision Theory and Applications (VIS-
APP), volume 1, pages 114–121.
Zhang, Z. (2000). A Flexible New Technique for Camera
Calibration. IEEE Transactions on Pattern Analysis
and Machine Intelligence, 22(11):1330–1334.
EXPERIMENTAL COMPARISON OF WIDE BASELINE CORRESPONDENCE ALGORITHMS FOR MULTI
CAMERA CALIBRATION
463
