
ADAPTATIVE CUBICAL GRID FOR ISOSURFACE EXTRACTION
John Congote
1
, Aitor Moreno
2
, I˜nigo Barandiaran
2
, Javier Barandiaran
2
and Oscar E. Ruiz
1
1
CAD/CAM/CAE Laboratory, EAFIT University, Medell´ın, Colombia
2
VICOMTech, San Sebastian, Spain
Keywords:
Adaptive isosurface extraction, Adaptive tessellation, Isosurfaces, Volume warping, Marching cubes.
Abstract:
This work proposes a variation on the Marching Cubes algorithm, where the goal is to represent implicit
functions with higher resolution and better graphical quality using the same grid size. The proposed algorithm
displaces the vertices of the cubes iteratively until the stop condition is achieved. After each iteration, the
difference between the implicit and the explicit representations are reduced, and when the algorithm finishes,
the implicit surface representation using the modified cubical grid is more detailed, as the results shall confirm.
The proposed algorithm corrects some topological problems that may appear in the discretisation process using
the original grid.
1 INTRODUCTION
Surface representation from scalar functions is an
active research topic in different fields of computer
graphics such as medical visualisation of Magnetic
Resonance Imaging (MRI) and Computer Tomogra-
phy (CT) (Krek, 2005). This representation is also
widely used as an intermediate step for several graph-
ical processes (Oscar E. Ruiz, 2005), such as mesh
reconstruction from point clouds or track planning.
The representation of a scalar function in 3D is known
as implicit representation and is generated using con-
tinuous algebraic iso-surfaces, radial basis functions
(Carr et al., 2001) (Morse et al., 2005), signed dis-
tance transform (Frisken et al., 2000) or discrete vox-
elisations.
The implicit functions are frequently represented
as a discrete cubical grid where each vertex has the
value of the function. The Marching Cubes algorithm
(MC) (Lorensen and Cline, 1987) takes the cubical
grid to create an explicit representation of the implicit
surface. The MC algorithm has been widely stud-
ied as has been demonstrated by Newman (Newman
and Yi, 2006). The output of the MC algorithm is
an explicit surface represented as a set of connected
triangles known as a polygonal representation. The
original results of the MC algorithm presented several
topological problems as demonstrated by Chernyaev
(Chernyaev, 1995) and have already been solved by
Lewiner (Lewiner et al., 2003).
Figure 1: Optimised Grid with 20
3
cubes representing the
bunny.
The MC algorithm divides the space in a regular
cubical grid. For each cube, a triangular representa-
tion is calculated, which are then joined to obtain the
explicit representation of the surface. This procedure
is highly parallel because each cube can be processed
separately without significant interdependencies. The
resolution of the generated polygonal surface depends
directly on the input grid size. In order to increase the
resolution of the polygonal surface it is necessary to
21
Congote J., Moreno A., Barandiaran I., Barandiaran J. and E. Ruiz O. (2009).
ADAPTATIVE CUBICAL GRID FOR ISOSURFACE EXTRACTION.
In Proceedings of the Fourth International Conference on Computer Graphics Theory and Applications, pages 21-26
DOI: 10.5220/0001786200210026
Copyright
c
SciTePress
increase the number of cubes in the grid, increasing
the amount of memory required to store the values of
the grid.
Alternative methods to the MC algorithm intro-
duce the concept of generating multi-resolution grids,
creating nested sub-grids inside the original grid. The
spatial subdivision using octrees or recursive tetrahe-
dral subdivision techniques are also used in the opti-
misation of iso-surface representations. The common
characteristic of these types of methods is that they
are based on adding more cells efficiently, to ensure a
higher resolution in the final representation.
This work is structured as follows: In Section 2, a
review of some of the best known MC algorithm vari-
ations is given. Section 3 describes the methodologi-
cal aspects behind the proposed algorithm. In Section
4 details the results of testing the algorithm with a set
of implicit functions. Finally, conclusions and future
work are discussed in Section 5.
2 RELATED WORK
Marching Cubes (MC) (Lorensen and Cline, 1987)
has been the de facto standard algorithm for the
process generating of explicit representations of iso-
surfaces from scalar functions or its implicit definition
The MC algorithm takes as an input a regular scalar
volumetric data set, having a scalar value residing at
each lattice point of a rectilinear lattice in 3D space.
The enclosed volume in the region of interest is sub-
divided into a regular grid of cubes. Each vertex of all
cubes in the grid is set the value of the implicit func-
tion evaluated at the vertex coordinates. Depending
on the sign of each vertex, a cube has 256 (2
8
) pos-
sible combinations, but using geometrical properties,
such as rotations and reflections, the final number of
combinations is reduced to 15 possibilities. These 15
surface triangulations are stored in Look-Up Tables
(LUT) for speed reasons. The final vertices of the
triangular mesh are calculated using linear interpola-
tion between the values assigned to the vertices of the
cube. This polygonal mesh representation is ideally
suited to the current generation of graphic hardware
because it has been optimised to this type of input.
MC variations were developed to enhance the res-
olution of the generated explicit surfaces, allowing the
representation of geometrical details lost during MC
discretisation process. Weber (Weber et al., 2001)
proposes a multi-grid method. Inside an initial grid,
a nested grid is created to add more resolution in that
region. This methodology is suitable to be used re-
cursively, adding more detail to conflictive regions.
In the final stage, the explicit surface is created by
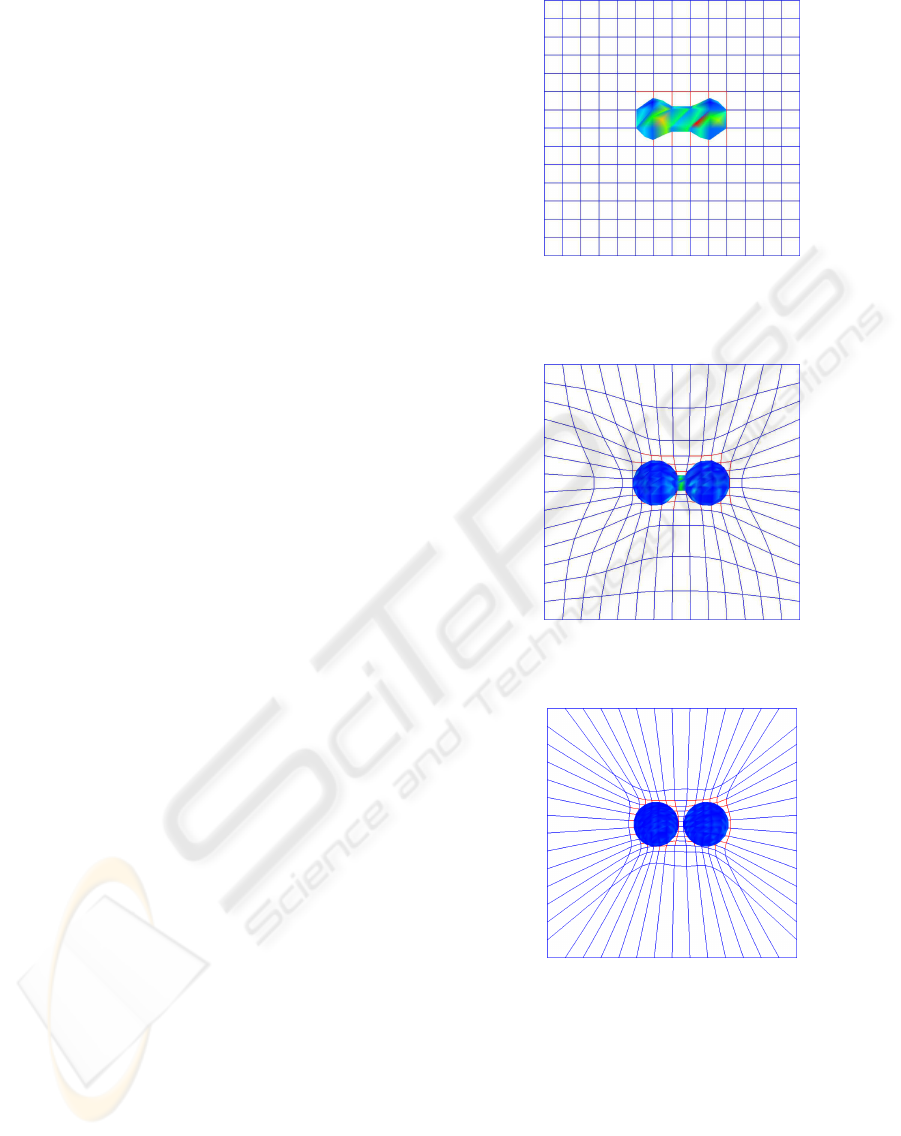
(a) Original Grid. The two spheres
are displayed as a singular object
due to the poor resolution in the re-
gion.
(b) Intermediate Grid. Both spheres
are displayed well, but are still
joined.
(c) Final Grid. The new resolution
displays two well shaped and sepa-
rated spheres with the same number
of cubes in the grid.
Figure 2: 2D slides representing three different states in the
evolution of the algorithm of two nearby spheres.
joining all the reconstructed polygonal surfaces.
It is necessary to generate a special polygonisa-
tion in the joints between the grid and the sub-grids
to avoid the apparition of cracks or artifacts. This
method has a higher memory demand to store the new
GRAPP 2009 - International Conference on Computer Graphics Theory and Applications
22
values of the nested-grid.
An alternative method to refine selected region
of interest is the octree subdivision (Shekhar et al.,
1996). This method generates an octree in the re-
gion of existence of the function, creating a poly-
gonisation of each octree cell. One of the flaws of
this method is the generation of cracks in the regions
with different resolutions. This problem is solve with
the Dual Marching Cubes method (Schaefer and War-
ren, 2004) and implemented for algebraic functions
by Pavia (Paiva et al., 2006)
The octree subdivision method produces edges
with more than two vertices, which can be overcome
by changing the methodology of the subdivision. In-
stead of using cubes, tetrahedrons were used to subdi-
vide the grid, without creating nodes in the middle of
the edges (Kimura et al., 2004). This method recur-
sively subdivides the space into tetrahedrons.
The previous methodologies increment the num-
ber of cells of the grid in order to achieve more reso-
lution in the regions of interest. Balmelli (Balmelli
et al., 2002) presented an algorithm based on the
movement of the grid to a defined region of interest
using a warping function. The result is a new grid
with the same number of cells, but with higher reso-
lution in the desired region.
Our method is also based on the displacement of
the vertices of the grid, obtaining dense distribution
of vertices near to the iso-surface. (see Figure 2)
3 METHODOLOGY
The proposed algorithm is presented as a modification
of the MC algorithm. The principal goal is the gen-
eration of more detailed approximations of the given
implicit surfaces with the same grid resolution.
Applying a selective displacement to the vertices
of the grid, the algorithm increases the number of
cells containing the iso-surface. In order to avoid self-
intersections and to preserve the topological structure
of the grid, the vertices are translated in the direction
of the surface. The displacement to be applied to each
vertex is calculated iteratively until a stop condition is
satisfied.
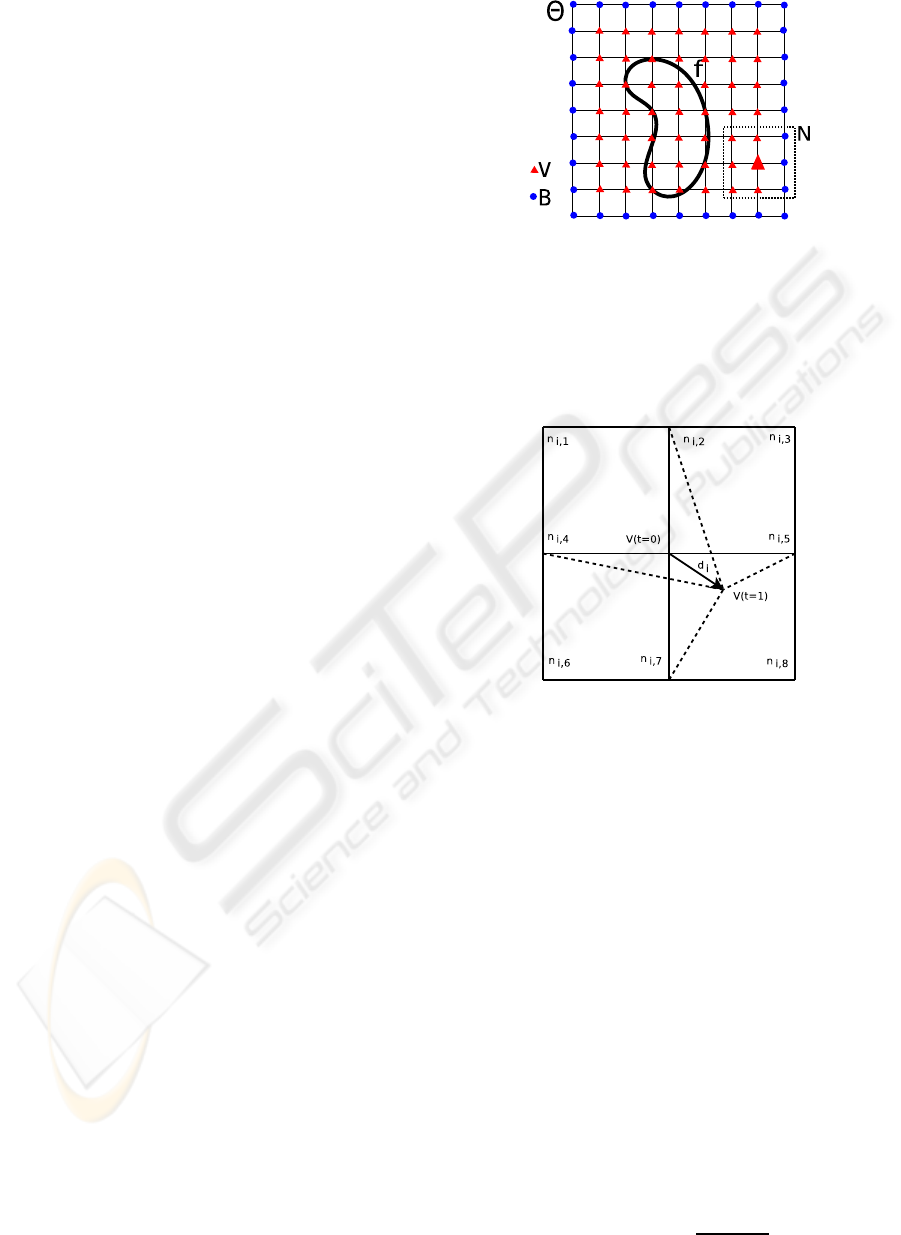
Let be Θ a rectangular prism tessellated as a cu-
bical honeycomb, W the vertices of Θ [Eq. 1], B the
boundary vertices of Θ [Eq. 2], and V the inner ver-
tices of Θ [Eq. 3]. For each vertex v
i
∈ V, a N
i
set
is defined as the 26 adjacent vertices to v
i
, denoting
each adjacent vertex as n
i, j
[Eq. 4]. (see Figure 3)
W = {w
i
/w
i
∈ Θ} (1)
B = {b
i
/b
i
∈ δΘ} (2)
Figure 3: Grid nomenclature, Θ cubical grid, f(x,y,z) = 0
implicit function, N vertex neightboor, V vertices inside the
grid, B vertices at the boundary of the grid.
V = W − B (3)
N
i
= {n
i, j
/n
i, j
is jth neighbourgh of v
i
} (4)
Figure 4: two consecutives iterations are show where the
vertex v is moved between the iterations t = 0 and t = 1.
The new configuration of the grid is shown as dotted lines.
The proposed algorithm is an iterative process. In
each iteration, each vertex v
i
of the grid Θ is trans-
lated by a d
i
distance vector, obtaining a new config-
uration of Θ, where i) the topological connections of
the grid are preserved, ii) the number of cells con-
taining patches of f are greater than, or equal to, the
previous value, and iii) the total displacement [Eq. 7]
of the grid is lower and is used as the stop condition
of the algorithm when it reach a value ∆(see Figure
4).
The distance vector d
i
is calculated as shown in
[Eq. 6] and it can be seen as the resultant force of
each neighbouring vertex scaled by the value of f at
the position of each vertex. In order to limit the max-
imum displacement of the vertices and to guarantee
the topological order of Θ, the distance vector d
i
is
clamped in the interval expressed in [Eq. 5]
0 ≤ |d
i
| ≤ MIN
|n
i, j
− v
i
|
2
(5)
ADAPTATIVE CUBICAL GRID FOR ISOSURFACE EXTRACTION
23

d
i
=
1
26
∑
n
i, j
n
i, j
− v
i
1+ | f(n
i, j
) + f(v
i
)|
(6)
∑
v
i
|d
i
| ≥ ∆ (7)
The algorithm stops when the sum of the distances
added to all the vertices in the previous iteration is
less that a given threshold ∆ [Eq. 7] (see Algorithm
1).
Algorithm 1: Vertex Displacement Pseudo-
algorithm. |x| represents the magnitude of x, ¯v
represents the normalised vector of v.
repeat
s := 0;
foreach Vertex v
i
do
d
i
:=
1
26
∑
n
i, j
n
i, j
−v
i
1+| f (n
i, j
)+ f (v
i
)|
;
mindist := MIN
|n
i, j
−v
i
|
2
;
d
i
:=
¯
d
i
CLAMP(|d
i
|,0.0, mindist);
v
i
:= v
i
+ d
i
;
s := s+ |d
i
|;
end
until s ≥ ∆ ;
4 RESULTS
Figure 5: Two balls in different positions with a scalar func-
tion as the distance transform, representing the behaviour of
the algorithm with different objects in the space.
The proposed algorithm was tested with a set of im-
plicit functions as distance transforms (see Figure 5)
and algebraic functions (see Figure 6(a)). For demon-
stration purposes, the number of cells has been chosen
to be very low to aid in the visual detection of the im-
provements produced by the algorithm. For the visu-
alisation process we use Marching Tetrahedra because
Table 1: Quality is measured as the average distance be-
tween the mesh vertices and the real surfaces. The col-
muns 1 and 2 represent the quality of the bunny model
(MC. QLTY.) using the given cubical grid size (GS
1
) with
the standard MC algorithm. The columns 3 and 4 shows
the quality (AMC. QLTY.) using the given cubical grid size
(GS
2
) with the proposed algorithm after 30 iterations. The
quality values (columns 2 and 3) have been aligned to be as
equal as possible, showing that to achieve a target quality,
the grid size using the proposed algorithm is less than the
required using the standard MC algorithm.
GS
3
1
MC. QLTY. AMC. QLTY. GS
3
2
10 0.958555 - -
20 0.369976 0.32257 10
30 0.188298 0.186994 20
40 0.129414 0.127588 30
50 0.094878 0.092761 40
it produces correct topological representation of the
iso-surface, and allows the identification of the topo-
logical correctness of the algorithm.
The obtained results of the algorithm are visually
noticeable, as is shown in Figure 6. Without using
the algorithm, the two spheres model is perceived as
a single object (see Figure 2). In an intermediate state
the spheres are still joined, but their shapes are more
rounded. In the final state, when the algorithm con-
verges, both spheres are separated correctly, each one
being rendered as a near perfect sphere. Thus, using
the same grid resolution and the proposed algorithm,
the resolution of the results has been increased.
The proposed algorithm iteratively increases the
number of cells containing the surface, adding more
detail to the new representation. Figure 6(b) shows
the incremental evolution of such a number of cubes
containing the surface, tending toward a doubling of
the number. The average distance triangulation ver-
tices to the original surface was calculated as pre-
sented in table 1. The proposed algorithm can rep-
resent the surface with a good quality with a fraction
of the amount of cells required with the original MC
algorithm.
The total displacement of the vertices in each iter-
ation is decreasing rapidly toward zero after a number
of iterations as show in the Figure 6(c). Despite the
seemingly high number of iterations, the algorithm
is executed only once for static functions, and can
be processed in the background. Even when the im-
plicit function is a time variant, the cubical grid can
be reused as the input cubical grid for the next algo-
rithm execution. When the implicit function changes
smoothly, the algorithm quickly re-converges after
just a few iterations significantly reducing the com-
putational effort.
GRAPP 2009 - International Conference on Computer Graphics Theory and Applications
24

(a) Algebraic function rendered
with an optimised grid
(b) Cube increment (Y axis) vs. Iter-
ation evolution (X axis)
(c) Total displacement of the grid (Y
axis) vs. Iteration evolution (X axis)
Figure 6: Grid evolution for an algebraic function, comparing the number of cubes which contains the iso-surface and the
total displacement of the vertices plotted against the stage of execution of the algorithm.
5 CONCLUSIONS AND FUTURE
WORK
Our proposed iterative algorithm has shown signif-
icant advantages in the representation of distance
transform functions. With the same grid size, it allows
a better resolution by displacing the vertices of the
cube grids towards the surface, increasing the number
of cells containing the surface.
The algorithm was tested with algebraic functions,
representing distance transform of the models. The
generated scalar field has been selected to avoid the
creation of regions of false interest, which are for
static images in which these regions are not used.
The number of iterations is directly related to the
chosen value ∆ as it is the stop condition. The algo-
rithm will continuously displace the cube vertices un-
til the accumulated displacement in a single iteration
is less than ∆. In the results, it can be seen that this
accumulated distance convergesquickly to the desired
value. This behaviour is very convenient to represent
time varying scalar functions like 3D videos, where
the function itself is continuously changing. In this
context, the algorithm will iterate until a good rep-
resentation of the surface is obtained. If the surface
varies smoothly, the cube grid will be continuously
and quickly readapted by running a few iterations of
the presented algorithm. As the surface changes may
be assumed to be small, the number of iterations un-
til a new final condition is achieved will be low. The
obtained results will be a better real-time surface rep-
resentation using a coarser cube grid.
6 ACKNOWLEDGEMENTS
This work has been partially supported by the Spanish
Administration agency CDTI, under project CENIT-
VISION 2007-1007. CAD/CAM/CAE Laboratory -
EAFIT University and the Colombian Council for
Science and Technology -Colciencias-. The bunny
model is courtesy of the Stanford Computer Graph-
ics Laboratory.
REFERENCES
Balmelli, L., Morris, C. J., Taubin, G., and Bernardini, F.
(2002). Volume warping for adaptive isosurface ex-
traction. In Proceedings of the conference on Visual-
ization 02, pages 467–474. IEEE Computer Society.
Carr, J. C., Beatson, R. K., Cherrie, J. B., Mitchell, T. J.,
Fright, W. R., McCallum, B. C., and Evans, T. R.
(2001). Reconstruction and representation of 3d ob-
jects with radial basis functions. In SIGGRAPH ’01:
Proceedings of the 28th annual conference on Com-
puter graphics and interactive techniques, pages 67–
76, New York, NY, USA. ACM.
Chernyaev, E. (1995). Marching cubes 33: Construction
of topologically correct isosurfaces. Technical report,
Technical Report CERN CN 95-17.
Frisken, S. F., Frisken, S. F., Perry, R. N., Perry, R. N.,
Rockwood, A. P., Rockwood, A. P., Jones, T. R., and
Jones, T. R. (2000). Adaptively sampled distance
fields: A general representation of shape for computer
graphics. pages 249–254.
Kimura, A., Takama, Y., Yamazoe, Y., Tanaka, S., and
Tanaka, H. T. (2004). Parallel volume segmentation
with tetrahedral adaptive grid. ICPR, 02:281–286.
Krek, P. (2005). Flow reduction marching cubes algo-
rithm. In Proceedings of ICCVG 2004, pages 100–
106. Springer Verlag.
ADAPTATIVE CUBICAL GRID FOR ISOSURFACE EXTRACTION
25

Lewiner, T., Lopes, H., Vieira, A., and Tavares, G. (2003).
Efficient implementation of marching cubes’ cases
with topological guarantees. Journal of Graphics
Tools, 8(2):1–15.
Lorensen, W. E. and Cline, H. E. (1987). Marching cubes:
A high resolution 3d surface construction algorithm.
SIGGRAPH Comput. Graph., 21(4):169–169.
Morse, B. S., Yoo, T. S., Rheingans, P., Chen, D. T., and
Subramanian, K. R. (2005). Interpolating implicit
surfaces from scattered surface data using compactly
supported radial basis functions. In SIGGRAPH ’05:
ACM SIGGRAPH 2005 Courses, page 78, New York,
NY, USA. ACM.
Newman, T. S. and Yi, H. (2006). A survey of the marching
cubes algorithm. Computers & Graphics, 30(5):854–
879.
Oscar E. Ruiz, Miguel Granados, C. C. (2005). Fea-driven
geometric modelling for meshless methods. In Virtual
Concept 2005, pages 1–8.
Paiva, A., Lopes, H., Lewiner, T., and de Figueiredo, L. H.
(2006). Robust adaptive meshes for implicit surfaces.
SIBGRAPI, 0:205–212.
Schaefer, S. and Warren, J. (2004). Dual marching cubes:
Primal contouring of dual grids. In PG ’04: Proceed-
ings of the Computer Graphics and Applications, 12th
Pacific Conference, pages 70–76, Washington, DC,
USA. IEEE Computer Society.
Shekhar, R., Fayyad, E., Yagel, R., and Cornhill, J. F.
(1996). Octree-based decimation of marching cubes
surfaces. In VIS ’96: Proceedings of the 7th confer-
ence on Visualization ’96, pages 335–ff., Los Alami-
tos, CA, USA. IEEE Computer Society Press.
Weber, G. H., Kreylos, O., Ligocki, T. J., Shalf, J. M.,
Hamann, B., and Joy, K. I. (2001). Extraction of
crack-free isosurfaces from adaptive mesh refinement
data. In Data Visualization 2001 (Proceedings of Vis-
Sym ’01), pages 25–34. Springer Verlag.
GRAPP 2009 - International Conference on Computer Graphics Theory and Applications
26
