
GENERIC 3D OBJECT RECOGNITION FROM TIME-OF-FLIGHT
IMAGES USING BOOSTED COMBINED SHAPE FEATURES
Doaa Hegazy and Joachim Denzler
Institute of Computer Science, Friedrich-Schiller-University in Jena , Ernst-Abbe-Platz 2, D-07743 Jena, Germany
Keywords:
Generic 3D object recognition, Object category database, Boosting, Range data.
Abstract:
Very few research is done to deal with the problem of generic object recognition from range images. With
the upcoming technique of Time-of-Flight cameras (TOF), for example the PMD-cameras, range images can
be acquired in real-time and thus recorded range data can be used for generic object recognition. This paper
presents a model for generic recognition of 3D objects from TOF images. The main challenge is the low
resolution in space and the noise level of the data which makes careful feature selection and robust classifier
necessary. Our approach describes the objects as a set of local shape specific features. These features are
computed from interest regions detected and extracted using a suitable interest point detector. Learning is
performed in a weakly supervised manner using RealAdaBoost algorithm. The main idea of our approach
has previously been applied to 2D images, and, up to our knowledge, has never been applied to range images
for the task of generic object recognition. As a second contribution, a new 3D object category database is
introduced which provides 2D intensity as well as 3D range data about its members. Experimental evaluation
of the performance of the proposed recognition model is carried out using the new database and promising
results are obtained.
1 INTRODUCTION
Generic object recognition (i.e. object class recog-
nition) has been an important topic of the computer
vision research in recent years (e.g. (Fergus et al.,
2003)). However, most of the successful approaches
developed up to date have concentrated on the generic
recognition of objects from 2D data, and very little at-
tention has been paid to the use of 3D range data in
this task.
Range images have the advantage of providing
direct information about the shape of objects which
makes them suitable for recognition of objects from
their shape as well as 3D object recognition. There-
fore, range data have been used mostly in specific 3D
object recognition (e.g. (Hetzel et al., 2001)). The
term specific object recognition means the recognition
of a certain object, regarding only its own characteris-
tics (e.g shape, color or texture) and at the same time
the recognition model is not able to classify any new
instance of the same visual class
1
of this object.
However, generic recognitionof objects from their
1
Objects could be divided according to their real life
visual appearance into visual classes or according to their
function into functional classes. Generic object recognition
shape using range images is a difficult task. One rea-
son for this is that surface shape representation is very
important in a recognition procedure from range data
but it is not clear which representation is more suit-
able for learning shapes of object classes. Moreover
the currently available object category databases do
not support the recognition of object categories using
range images because they provide only 2D images of
their object categories.
This paper has two main contributions. First, a
novel 3D object category database is introduced. The
database provides 2D/3D data about its object classes.
The construction of the database is done using a 3D
Time-of-flightPMD camera (Lange, 2000). Second, a
recognition model for generic 3D objects from range
images is presented. This model consists of three
main steps. First, an affine interest point detector is
applied to the intensity image to detect a set of interest
regions. The detected interest regions are extracted
together with their corresponding 3D depth data. Sec-
ond, simple local surface shape features are com-
puted from the extracted 3D regions. Finally, boost-
ing, namely RealAdaBoost algorithm (Schapire and
concerns with recognizing object which belong to the same
visual class.
321
Hegazy D. and Denzler J. (2009).
GENERIC 3D OBJECT RECOGNITION FROM TIME-OF-FLIGHT IMAGES USING BOOSTED COMBINED SHAPE FEATURES.
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications, pages 321-326
DOI: 10.5220/0001789303210326
Copyright
c
SciTePress

Singer, 1999), is used to learn these simple shape fea-
tures for each class. The idea of the proposed model,
which is combining and boosting interest point detec-
tor together with local descriptors for recognition, is
normally used for the generic recognition tasks using
2D images and has never been used with range im-
ages.
The outline of the paper is as follows. The related
work is summarized in section 2. Section 3 describes
the new 3D object category database. The proposed
generic 3D object recognition model is described and
explained in section4. Experimental evaluations and
results obtained are presented in section 5. Conclu-
sions are finally drawn in section 6.
2 RELATED WORK
Most of the recent researches and approaches in
generic object recognition have focused on model-
ing the appearance and shape variability of objects
with limited number of changes in viewing point
(e.g. (Fergus et al., 2003; Leibe et al., 2004)). One
main reason is that most of the current object cat-
egory datasets contain images with small variations
in viewing point (e.g. Caltech 4 and UIUC cars).
A small number of research have investigated the
problem of generic 3D object recognition. One of
these approaches is presented by Savarese and Fei-
Fei (Savarese and Fei-Fei, 2007). In their approach,
a model of an object category is captured by linking
together diagnostic parts of the objects from different
viewing points. These parts are large and discrimi-
native regions of the objects and consists of many lo-
cal invariant features. To form a model of the object
class, the parts are connected through their mutual ho-
mographic transformation. The resulting model is a
summarization of both appearance and geometry in-
formation of the object class. In addition to that,
(Savarese and Fei-Fei, 2007) introduced a new 3D
object dataset. However, the approach presented in
this paper is totally different from the approach of
(Savarese and Fei-Fei, 2007). The main difference is
that range images are used in our proposed approach,
which is not the case in (Savarese and Fei-Fei, 2007)
as they use 2D images. Furthermore, only surface
shape features are used here to represent the instances
of the object classes while no appearance information
is used.
Another approach, which is closer to the work pre-
sented in this paper, is described in (Ruiz-correa et al.,
2003). The approach developed to recognize objects
belonging to a particular shape class in range images.
In their approach, first, shape class components are
learnt and extracted from range images. Then, the
spatial relationships among the extracted components
are encoded using a shape representation called sym-
bolic surface signature. This results in forming a
shape class model that consists of three-level hierar-
chy of classifiers where the first two levels of the hi-
erarchy extract the component and the third one ver-
ifies their geometric relationships. The dataset used
for the purpose of learning and classifying the model
is range images of objects made of clay. The dataset
is then enlarged by applying deformations to the orig-
inal clay objects to offer intra-class variabilities.
Although our proposed approach agrees with the
approach of (Ruiz-correa et al., 2003) in that sur-
face shape descriptors are used to represent the object
classes in real range images, there exist main impor-
tant differences between the two approaches. First,
a combination of three different simple local surface
features is used in our approach as a representation of
the instance of the different object categories. Sec-
ond, learning is performed here using boosting which
is different from the learning technique, namely Sup-
port Vector Machines (SVM), used in (Ruiz-correa
et al., 2003). Moreover, a dataset of real range im-
ages and of real different object categories is used in
our approach. The dataset contains large intra-class as
well as inter-class variabilities, so it is not necessary
to apply any deformation to enlarge it.
3 3D OBJECT CATEGORY
DATASET
An object category database of 936 2D/3D images
(2D grayscale as well as range data) of 26 objects (36
images per object) is built using a 3D Time-of-Flight
PMD camera (Lange, 2000). The objects are in-
stances of three main visual categories (classes): cars,
motors and animals. A fourth class is constructed to
be used as a background or a negative class during
training and testing. This background class consists
of objects which are visually different from the
objects instances of the three main classes.
Due to the difficulty to record different outdoor
views of real objects using the PMD camera
2
, human
made objects (toys) are used to build the database.
The instances of each object class are chosen with
different sizes and appearances to achieve large
intra-class variability as much as possible.
2
Settings required to use a PMD camera make it difficult
to acquire outdoors views of real objects.
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
322

(a) Cars (b) Motors (c) Animals
Figure 1: Example images of the database for the three used visual classes.
3.1 Dataset Acquisition
A 3D PMD camera was fixed to a rigid stand about
1.1 meters from its base. A motorized turntable was
placed about 2 meters from the base of the stand. It is
noticed by experiments that, by placing the turntable
closer than 2 meters from the camera, the resultant
images contain inaccurate distance measurements
3
.
The camera was set in a way that the objects appear
in the center of the image when placed at the center
of the turntable. White background was provided by
placing the turntable in front of a white wall. The nor-
mal lighting condition of the room was used.
Each object was placed in a stable configuration
at approximately the center of the turn table. The
turntable was then rotated through 360 degrees about
the vertical axis and 36 2D/3D images were acquired
per object; one at every 10 degrees of rotation. Figure
1 shows different database images of the three classes.
4 A GENERIC 3D OBJECT
RECOGNITION MODEL
In this section, the main idea of the proposed generic
3D object recognition model is explained. Figure 2
provides a semantic view of the main components of
the proposed model.
4.1 Preprocessing and Interest Regions
Detection
Preprocessing. The range data of a TOF chip (in this
paper PMD) has statistical noise. In order to filter this
noise and smooth the range data, a preprocessing step
by applying median filter is first performed. Further-
more, an initial histogram normalization is applied to
3
For this reason, the size of the objects within the images
is relatively small.
the PMD grayscale images to enhance their low con-
trast and improvethe interest points detection process.
Interest Regions. An implementation of the Hes-
sian affine-invariant region detector developed by
(Mikolajczyk and Schmid, 2002) is used to detect and
extract interest regions from the 2D grayscale images.
4.2 Local Features Computation
Range images have the advantage of providing direct
information about the shape of objects. Therefore, it
is wise to make use of this advantage and give prefer-
ence to features that capture different aspects of this
shape. For this reason, shape-specific local feature
histograms are used in our model. These features pre-
sented and used in (Hetzel et al., 2001) for the task of
free-formspecific 3D object recognition. The features
are namely: pixel depth, surface normals and curva-
ture. The main advantages of these features are that
they are easy to calculate, robust to viewpointchanges
and contain discriminative information (Hetzel et al.,
2001).
4.2.1 Pixel Depth
The distance to the object provided by the PMD cam-
era is the simplest available feature. Computing a
histogram of pixel distances provides a simple fea-
ture which is invariant against translations and image
plane rotations and at the same time gives valuable
cues about the shape of the object. In this paper, a
histogram of 64 bins of pixel distances is calculated
and used.
4.2.2 Surface Normals
A representation of surface normals as a pair of two
angles (φ, θ) in sphere coordinates is presented in
(Hetzel et al., 2001). This representation is shown
to spread over as possible of the available histogram
GENERIC 3D OBJECT RECOGNITION FROM TIME-OF-FLIGHT IMAGES USING BOOSTED COMBINED SHAPE
FEATURES
323
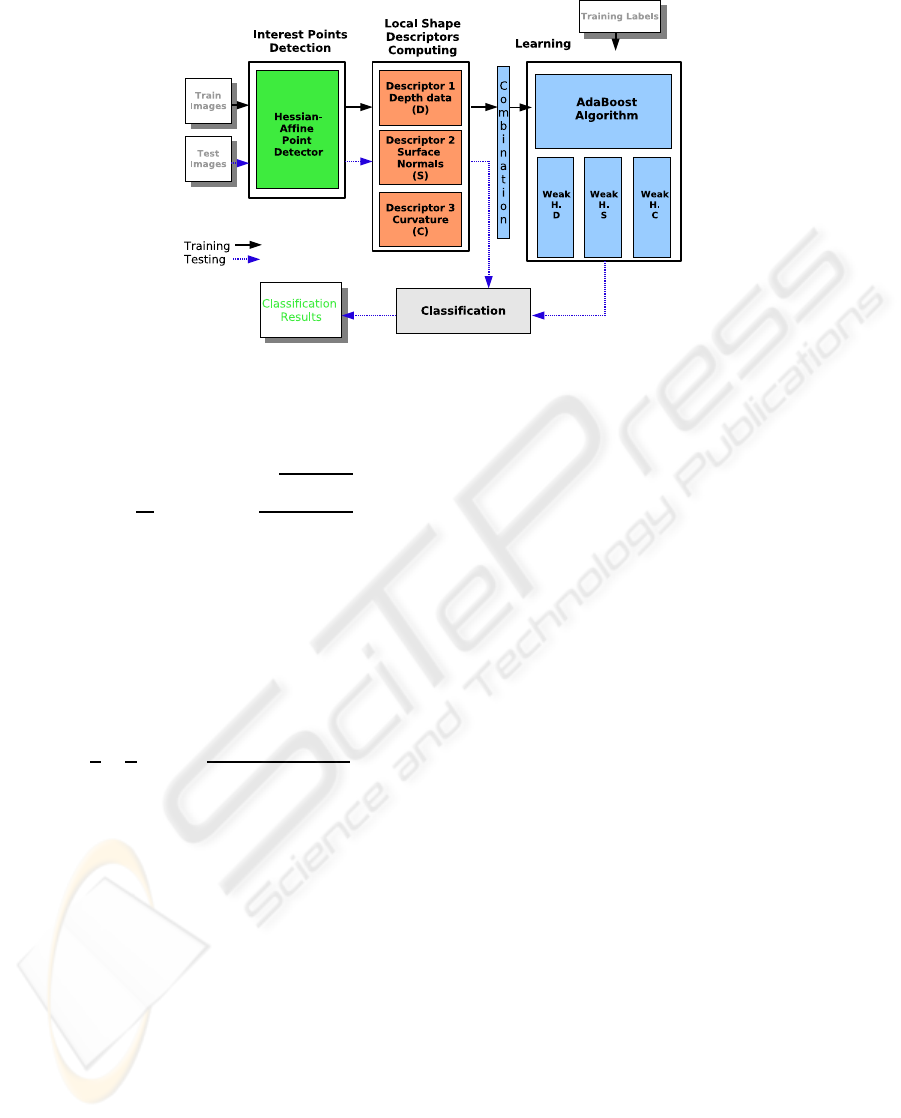
Figure 2: The proposed generic 3D object recognition model.
range without having a bias for certain regions (Hetzel
et al., 2001). The angles can be calculated as follows:
φ = arctan(
n
z
n
y
), θ = arctan
q
(n
2
y
+ n
2
z
)
n
x
(1)
A two dimensional histogram of size 8 x 8 bins of
the of two angles is computed and used.
4.2.3 Curvature
The shape index representation depends on the sur-
face curvature (Hetzel et al., 2001). Its representation
is given as follows:
S
I
=
1
2
−
1
π
∗ arctan
k
max
(p) + k
min
(p)
k
max
(p) − k
min
(p)
(2)
where k
max
(p) and k
min
(p) denoting the principle cur-
vatures around the point p. The shape index S
I
has
the range of [0, 1], and every distinct surface shape
corresponds to a unique value S
I
(except for planar
surfaces, which is mapped to the value 0.5, together
with saddle shapes) (Hetzel et al., 2001). A histogram
of shape index of 64 bins is used.
4.3 Learning Model
The learning model is based on the AdaBoost with
confidence-rated prediction algorithm (Schapire and
Singer, 1999) (RealAdaBoost). RealAdaBoost takes
a training set I = {I
1
, ..., I
N
} and their associated la-
bels l = {l
1
, ..., l
N
}, where N is the number of training
images and l
i
= +1 if the object in the training image
I
i
belongs to the class category and l
i
= −1 otherwise.
Since more than one feature type is used, each
training image I is represented by a set of features
F
i, j
(t
i, j
, v
i, j
), j = 1...n
i
where n
i
is the number of
features in image I
i
, t
i, j
indicates the type of the fea-
ture (d for pixel depth, c for surface normals and s
for shape index) and v
i, j
is the feature vector. Real-
AdaBoost algorithm puts weights on the training im-
ages and requires construction of a weak hypothesis
h
k
which, relative to the weights, has discriminative
power. The algorithm is run for a certain number of
iterations T. In each iteration k, one weak hypothesis
is selected and the weights of the training images are
updated. A linear combination of the weak hypothe-
ses together with their weights is used as a strong hy-
pothesis to classify new images.
5 EXPERIMENTS AND RESULTS
Two sets of experiments are performed to validate the
proposed recognition approach. These two experi-
ments allow to investigate the categorization ability
of the approach as well as its performance with re-
spect to clutter and occlusion. The first set of ex-
periments considers scenes with single class mem-
ber while the second one considers scenes with multi-
ple objects containing background clutter and occlu-
sion. Training the model is performed only once us-
ing images containing a single class member. Due
to the lack of established research in generic 3D ob-
ject recognition, it is difficult to obtain a standard
dataset to compare the results with. Therefore, all
experiments are performed using our 3D object cat-
egory dataset. A total number of 200 images is used
for training the model: 100 training images of a ran-
domly selected instances of each object class in addi-
tion to 100 training images of the background class.
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
324
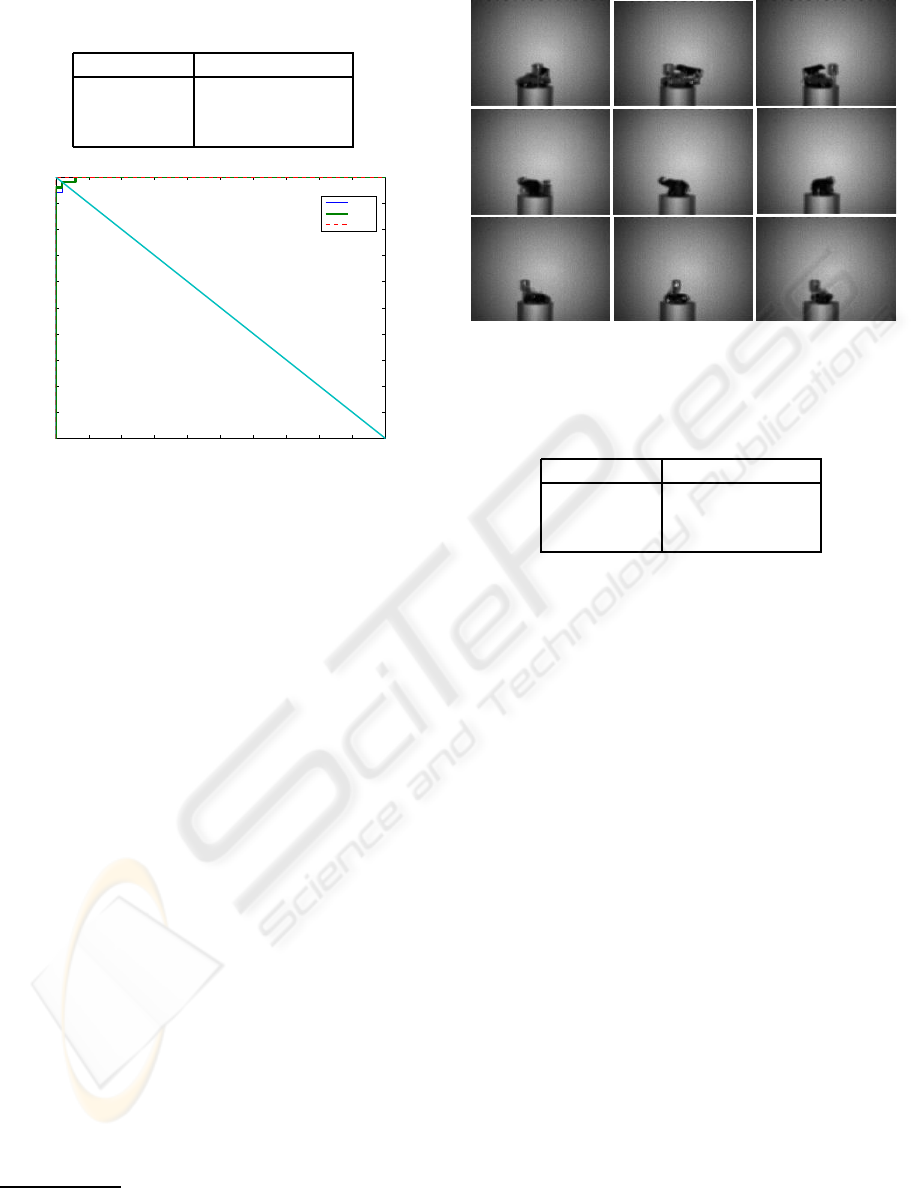
Table 1: ROC-eqq-err rates of the categorization perfor-
mance of the used three object classes.
Object class ROC-equal-error
Cars 0.02
Motors 0.02
Animals 0.00
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
False Positive Rate
True Positive Rate
ROC Curves
Cars
Motors
Animals
Figure 3: The ROC curves of the three classes on the cate-
gorization task.
RealAdaBoost algorithm is run for T = 150 itera-
tions
4
. The model’s performance is evaluated using
the Receiver-Operating-Characteristic curve (ROC).
Moreover, The ROC-equal-error rate is computed for
each curve. This error rate gives a nice trade-off value
between the true positives and false positives and is
defined as the point on the ROC curve where the true
positive rate = 1-false positive rate.
5.1 Experiment 1: Categorization
Performance
In this set of experiments, the categorization ability of
the recognition model is investigated. A test set of 100
images is used: 50 images of a novel instances of each
object class and 50 images of the background class.
Figure 3 displays the ROC curves for each object class
while the ROC-equal-error rates are presented in ta-
ble 1. The model achieves a high categorization per-
formance on the three used object class. Although
the used range images do not contain complex scenes,
some difficulties are imposed on the recognition task
due to the small size of objects in the images. De-
tailed variations between different object classes are
not clear which makes categorization a hard task even
for humans (see figure 1).
4
We conclude this number by experiments where T is
varied from 10 to 300. After T = 150, the test error remains
constant.
Figure 4: Example of the images recorded for the task of
categorization in complex scenes.
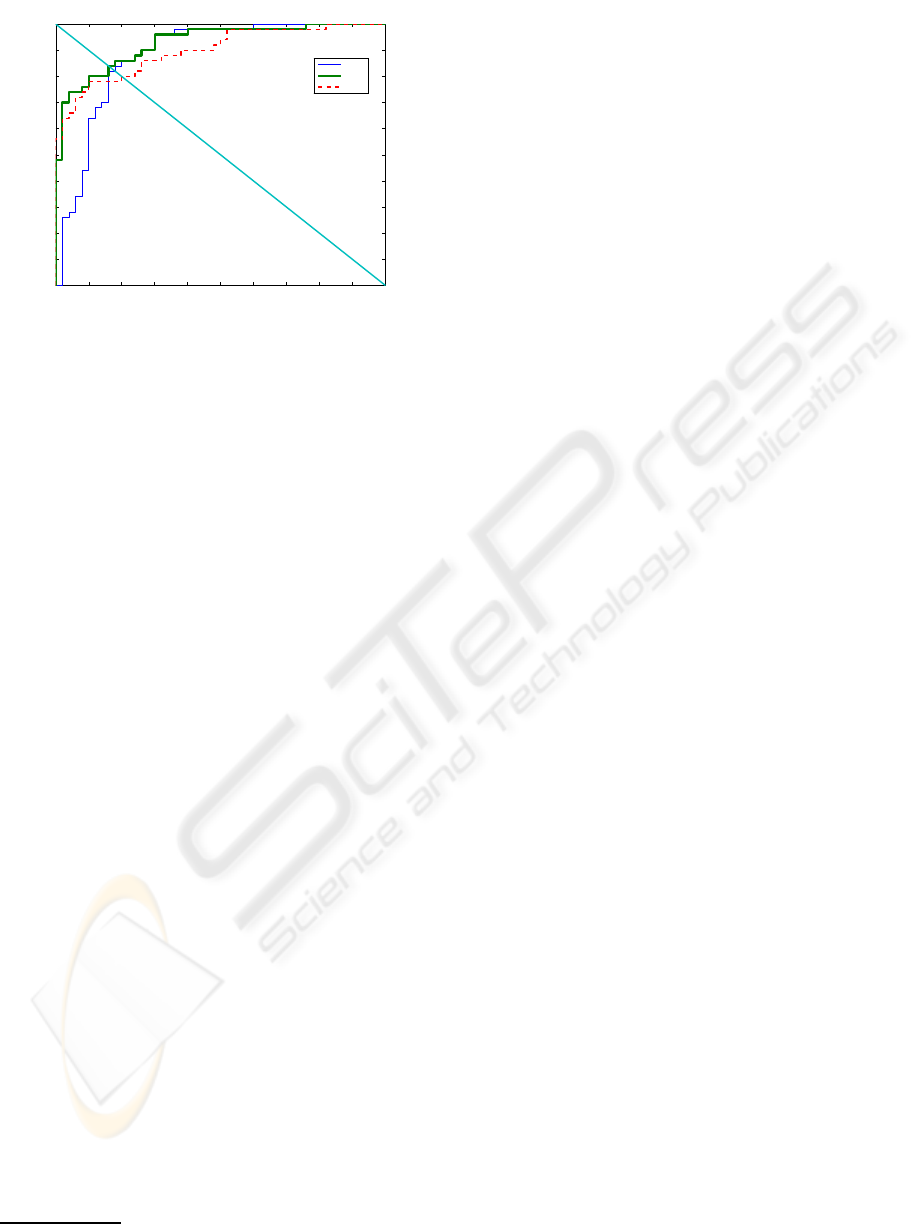
Table 2: ROC-eqq-err rates of recognition using complex
scenes for the used three object classes.
Object class ROC-equal-error
Cars 0.18
Motors 0.20
Animals 0.20
5.2 Experiment 2: Categorization in
Complex Scenes
A new set of test images for each object class is
recorded for this set of experiments (see figure 4) .
These new test images contain occlusion and clutter
by placing instances of each object class (different
from the instances used in training) together with in-
stances of newpreviously unused object classes. A to-
tal of 36 range images from different view points are
then recorded for each object class. The ROC curves
are shown in figure 5 and the ROC-equal-error rates
are displayed in table 2.
Obviously, the performance in these experiments
degrades than the previous experiments due to the
presence of occlusion and clutter. Beside that, the low
resolution of the intensity images of the PMD cam-
era affects the detection performance of the point de-
tector which influences in turn the categorization per-
formance. Another important aspect concerning the
recognition model is the computational time needed
for the training the testing processes. The average
training time of the model is approximately 26 min-
utes for each object class while the test time for a
whole test set is approximately one minute for each
class.
GENERIC 3D OBJECT RECOGNITION FROM TIME-OF-FLIGHT IMAGES USING BOOSTED COMBINED SHAPE
FEATURES
325
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
False Positive Rate
True Positive Rate
ROC Curves
Cars
Motors
Animals
Figure 5: The ROC curves of the three classes on the cate-
gorization with the presence of clutter and occlusion task.
6 CONCLUSIONS
This paper has presented two contributions. First,
a database for generic 3D object recognition has
been presented. It has the advantage of providing
range data as well as intensity information recored
by a Time-of-Flight device of its object classes. The
database will be made available for the public com-
parison of different approaches
5
. Second, a model for
generic 3D object recognition from range images has
been proposed. The main idea of the model is simple
and has never been applied to range images before.
The proposed model describes the objects as a set of
simple local surface shape features computed from in-
terest regions detected by a region detector. Learn-
ing is done using RealAdaBoost algorithm. Experi-
ments have been performed using the new presented
database and promising results have been obtained.
However, many improvements could be applied to
the model in order to obtain better performance in the
future. One of these improvements is the use of a
point detector which is applied directly to range im-
ages (3D point detector). Another important issue is
improving the quality of the intensity images deliv-
ered by the PMD camera by combining it with a high
resolution 2D camera.
Finally, the extension of the 3D object category
database by adding more object categories and pro-
viding high resolution intensity and color data about
them, in addition to the 3D data, is an important step
for the future work.
5
http://www.inf-cv.uni-
jena.de/index.php?id=hegazy&L=1.
REFERENCES
Fergus, R., Perona, P., and Zisserman, A. (2003). Object
Class Recognition by Unsupervised Scale-Invariant
Learning. In IEEE Computer Society Conference on
computer vision and Pattern Recognition CVPR3, vol-
ume 2, pages 264–271.
Hetzel, G., Leibe, B., Levi, P., and Schiele, B. (2001). 3d
object recognition from range images using local fea-
ture histograms. In IEEE International Conference on
Computer Vision and Pattern Recognition (CVPR’01),
volume 2, pages 394–399.
Lange, R. (2000). 3D Time-of-Flight Distance Mea-
surement with Custom Solid-State Image Sensors in
CMOS/CCD-Technology. PhD thesis, University of
Siegen.
Leibe, B., Leonardis, A., and Schiele, B. (2004). Com-
bined object categorization and segmentation with an
implicit shape model. In In ECCV workshop on sta-
tistical learning in computer vision, pages 17–32.
Mikolajczyk, K. and Schmid, C. (2002). An affine invariant
interest point detector. In 7th European Conference
on Computer Vision ECCV02, pages 128–142.
Ruiz-correa, S., Shapiro, L. G., and Meil, M. (2003). A
new paradigm for recognizing 3-d object shapes from
range data. In Proceedings of the IEEE Computer
Society International Conference on Computer Vision
2003, Vol.2, pages 1126–1133.
Savarese, S. and Fei-Fei, L. (2007). 3d generic object
categorization, localization and pose estimation. In
ICCV07, pages 1–8.
Schapire, R. E. and Singer, Y. (1999). Improved boosting al-
gorithms using confidence-rated predictions. Machine
Learning, 37:297–336.
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
326
