
EFFICIENT PLANAR CAMERA CALIBRATION VIA AUTOMATIC
IMAGE SELECTION
Brendan P. Byrne, John Mallon and Paul F. Whelan
Centre for Image Processing & Analysis,
Dublin City University, Dublin 9, Ireland
Keywords:
Planar camera calibration, Image network, Automatic image selection.
Abstract:
This paper details a novel approach to automatically selecting images which improve camera calibration re-
sults. An algorithm is presented which identifies calibration images that inherently improve camera parameter
estimates based on their geometric configuration or image network geometry. Analysing images in a more
intuitive geometric framework allows image networks to be formed based on the relationship between their
world to image homographies. Geometrically, it is equivalent to enforcing maximum independence between
calibration images, this ensures accuracy and stability when solving the planar calibration equations. A we-
bcam application using the proposed strategy is presented. This demonstrates that careful consideration of
image network geometry, which has largely been neglected within the community, can yield more accurate
parameter estimates with less images.
1 INTRODUCTION
Camera calibration from planar targets is the domi-
nant configuration when working with conventional
perspective cameras. Its foundations were proposed
independently by Sturm and Zhang (Sturm and May-
bank, 1999; Zhang, 1999) and are well understood
within the community today. Compared with tradi-
tional calibration techniques (Faugeras, 1993; Tsai,
1987; Wei and Ma, 1994), plane based calibration sig-
nificantly reduces input data requirements. This cou-
pled with readily available implementations, (Bouget,
2001; OpenCV, 2001), has contributed to its popular-
ity.
Planar calibration simply requires the user to cap-
ture at least two images with varying planar target
pose. We call these images the image network (IN).
Typically many more images are used to improve cal-
ibration accuracy. The stability of planar calibration
methods has been well studied in the literature (Gon-
zalez et al., 2005; Salvi et al., 2002; Sun and Cooper-
stock, 2007). Generally the stability is characterised
based on the reprojection error which is the Euclidean
distance between the 3D world points, back projected
onto the image plane, and the measured 2D image
points. In all cases findings suggest that larger INs
increase parameter estimation accuracy.
Although large INs yield more accurate results,
practical constraints such as capturing a large data
set, feature extraction, and calibration takes a consid-
erable amount of time and expertise. To this end it
would be desirable to achieve good calibration accu-
racy within these practical constraints. Thus the focus
should be on forming smaller INs capable of produc-
ing accurate results. This paper outlines how this is
achieved via automatic image selection (or a Selected
Image Network (SIN)).
The possibility of degeneracies increases when
considering a smaller image set. The degeneracies
effect the conditioning of the planar calibration equa-
tions and lead to poor parameter estimates. Critical
configurations have been identified and well studied
by (Sturm and Maybank, 1999) and (Zhang, 1999)
and shown to consist of pure rotation and translation,
butimages close to critical, which are difficult to iden-
tify and havereceived less attention in the community,
also give poor results.
In (Rupp and Elter, 2007), an image selection
strategy is employed to improve calibration results.
However, the algorithm selects images based on their
reprojectionerror which requires the camera to be cal-
ibrated in the first place. This defeats the purpose of
an efficient calibration via image selection and adds
considerable time and effort in doing so. Also, by us-
90
P. Byrne B., Mallon J. and F. Whelan P. (2009).
EFFICIENT PLANAR CAMERA CALIBRATION VIA AUTOMATIC IMAGE SELECTION.
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications, pages 90-94
DOI: 10.5220/0001792100900094
Copyright
c
SciTePress
ing the reprojection error as a quality measure, image
and camera noise may effect results as images with
favorable geometry could be omitted. By analysing
the planar calibration problem in an alternative geo-
metric framework as proposed by (Gurdjos, 2001) it
is possible to form a geometric criterion for selecting
good calibration images which does not require a pre-
calibration stage.
The main contribution of this work is that it pro-
vides an image selection algorithm, based on an al-
ternativegeometric interpretation, which forms image
networks (SINs) that contain less images and give ef-
ficient calibration results. An application using a we-
bcam is presented which demonstrates that efficient
calibration results can be achieved with little effort.
2 METHOD
The proposed algorithm selects images based on char-
acteristics from the alternative geometric approach
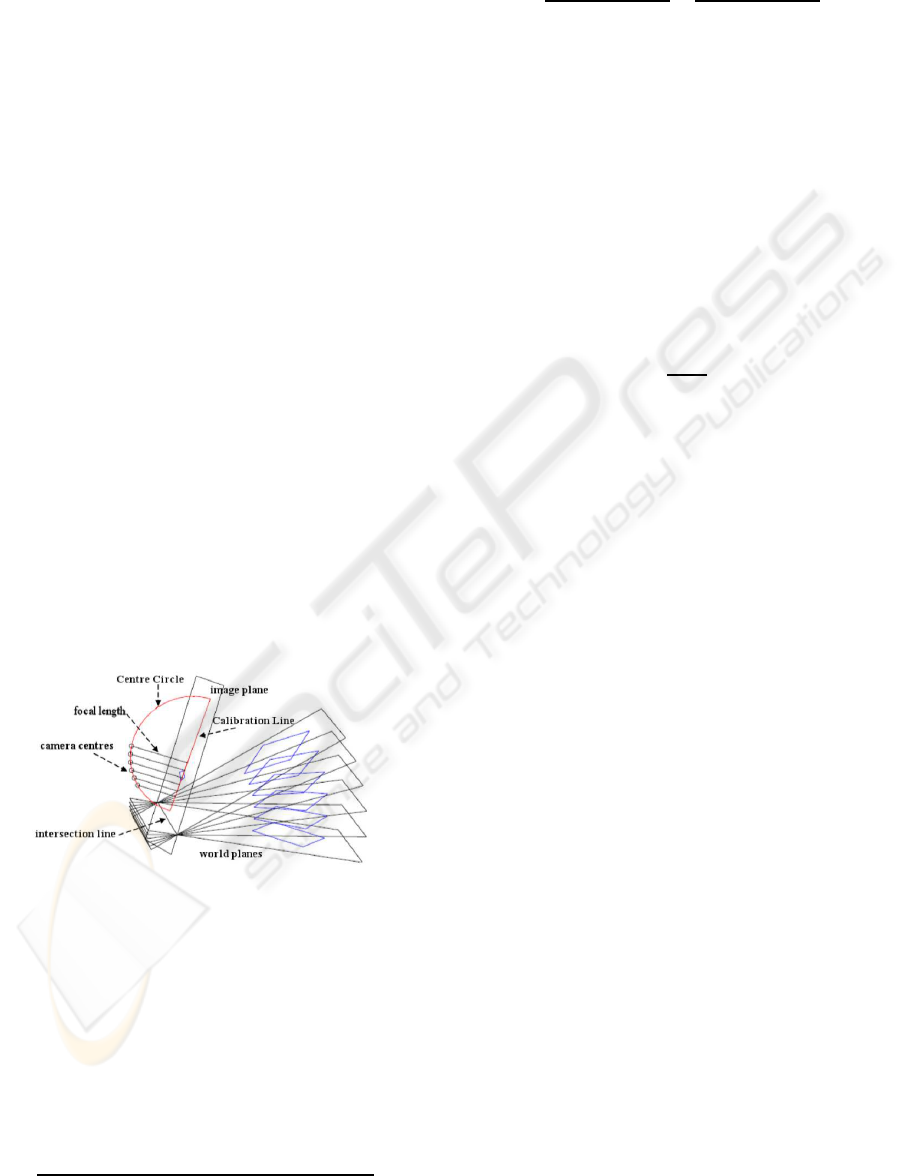
proposed by (Gurdjos, 2001). In Figure 1, as the
world plane rotates about its intersection with the im-
age plane it remains in homographic correspondence.
Thus a single planar homography matrix H represents
the transformation. The associated camera centres, of
each rotating world to image plane, forms a locus of
possible camera centres which in turn projects to the
image plane in the form of a line, the Calibration Line
(CL). By using the well known (Sturm and Maybank,
Figure 1: Poncelet’s Theorem (Gurdjos, 2001).
1999; Zhang, 1999) planar calibration equations con-
straints (1), and following some algebraic manipula-
tions, an expression for the CL can be derived (2).
h
T
1
ωh
1
− h
T
2
ωh
2
= 0, h
T
1
ωh
2
= 0 (1)
where h
i
is the i
th
column of H.
v
0
= Γu
0
+ Λ (2)
where Γ is the slope of the CL given by,
Γ =
−h
11
h
3
32
+ h
12
h
3
31
− h
11
h
2
31
h
32
+ h
12
h
31
h
2
32
h
22
h
31
h
2
32
− h
21
h
2
31
h
32
− h
21
h
3
32
+ h
22
h
3
31
(3)
and Λ is the y-intercept given by,
Λ =
h
21
h
31
+ h
22
h
32
h
2
31
+ h
2
32
−
h
11
h
31
+ h
12
h
32
h
2
31
+ h
2
32
Γ (4)
In (Wang and Liu, 2006), the authors propose a
method of linear calibration using the intersection
point of CLs. In our method we use the CLs as a guide
to choosing calibration images for the SINs. Suit-
able images are selected based on the orientation of
their CLs. Since the CL encapsulates geometric infor-
mation about the planar grid in the world, enforcing
maximum independence between CLs ensures each
image contributes independently to solving the sys-
tem of planar calibration equations. Independence be-
tween images is evaluated based on the relative angle
between image CLs. The angle between CLs, (θ), is
dependant on the number of images in the IN (N).
θ =
180
◦
N
(5)
Therefore if a four IN is required from a data set the
angle between image CLs should be 45
◦
. In practice,
a tolerance of ±1
◦
is enforced on θ for the selection
process. Based on the homographies from multiple
images, we employ an algorithm to select the most
suitable images which will provide efficient calibra-
tion results.
3 IMAGE SELECTION
Automatic image selection is implemented in two
stages. The initial step requires each image CL to be
formed (as in section 2) with the angle of each CL rel-
ative to the x-axis calculated via the slope (arctan(Γ)).
CLs that have absolute angle near 0
◦
or 90
◦
are re-
jected for consideration as they correspond to unsta-
ble IN geometry (fronto-parallel). Once N is chosen
the optimal θ can be calculated (5) which is used to
form the SINs.
The underlying search method of the proposed
image selection strategy is a binary search approach
(Knuth, 1998). In Figure 2 the proposed strategy is
presented. Each node represents an image number
while the number adjacent to each node is its CL ori-
entation. In a real situation all nodes are connected
to each other where the connecting lines represent the
angle between image CLs. To aid explanation all pos-
sible connecting lines are not shown, instead the valid
search paths are shown i.e each line is in fact equal to
the binary search key which is |θ| ± 1
In this example, N, the number of images required
in the SIN, is set to four therefore θ is 45
◦
. The
search begins with the seed node 1. When a route
EFFICIENT PLANAR CAMERA CALIBRATION VIA AUTOMATIC IMAGE SELECTION
91

corresponding to the search key is identified (node
3) the search continues with node 3 as the seed. In
this case there are two possible routes, node 12 and
17. Since a binary search exploits only one route at a
time, the proposed strategy implements the search in
a cascaded fashion. Therefore the search will return
to this point and follow other routes in the next cy-
cle. If node 12 is chosen there are three candidates to
form the SIN - 22, 31 and 64. When one possibility
is chosen the SIN is formed and the node is deleted.
This will allow the binary search to find the next valid
IN with subsequent searches. When all possible SINs
along the (1, 3, 12) route have been formed, all image
nodes are reintroduced but node 12 is deleted. This
enables the algorithm to return to the point (1, 3) and
follow route 17. The search continues in this fashion
until all valid routes have been identified.
1
3
12
17
22
31
64
-25
20
64
65
-70
-69
-71
Tier 1
Tier 2
Tier 3
Tier 4
Figure 2: Image Search Space.
3.1 Search Algorithm Implementation
The implementation of the search algorithm is pre-
sented in Figure 3. The algorithm is initialised with
the seed node which is stored in the IN matrix. The
binary search is implemented and if it’s successful,
the current IN size, N
T
, is incremented and the image
found, imt, is stored in IN. A check is performed to see
if N
T
is equal to N the desired IN size. If true the cur-
rent imt is deleted from the search space and the algo-
rithm loops back to run the binary search again. This
is a similar situation as in Figure 2 when tier 4 was
reached, the node was deleted so other nodes could
be found in subsequent searches. In the case where
N
T
6= N, the algortihm simply loops back to find the
next image in the network via the binary search.
The most significant branch point in the algorithm
is the binary search junction. When a search fails it in-
dicates that there are no more routes in a particular tier
of the search space. A check is performed on N
T
to
see if the search has failed in tier 2 (i.e. if N
T
= 1). If
it has failed the overall search is finished and all valid
INs are stored in the IN matrix. On the other hand, if
N
T
6= 1, all nodes are reintroduced to the search space
and the N
th
node of the current IN is deleted from the
list. This is a similar situation to the example given
in Figure 2 where the IN was (1, 3, 12). When all tier
4 nodes were found and subsequently deleted, node
12 was removed which allowed the binary search to
follow the (1, 3, 17) route. The search continues until
N
T
= 1 which indicates that all possible routes have
been explored. The algorithm is implemented in this
fashion for each node in the search space. Further re-
finement can be applied to the algorithm if duplicate
INs are stored.
Initialise
IN = [IN im]
BS fail?
N = N + 1
IN=[IN imt];
T T
N = N?
T
N = 1?
Load nodes,
delete N from list
and current IN
th
delete imt
no
yes
yes
no
Finish
Store IN
no
yes
imt : image returned (BS)
BS : Binary search
IN : Image Network
im : Initial image
N : Desired IN size
N : Current IN size
T
T
Figure 3: Algorithm Flowchart.
4 APPLICATION
A webcam calibration application was developed
to demonstrate the benefits of the image selection
scheme. A labtec “web” webcam capturing 15fps at
320 × 240 pixels was used. The application captures
images for 20 seconds thus giving 300 images for the
calibration data set. Images are captured, by vary-
ing the location of the camera, while also ensuring
the planar calibration target remains within the field
of view of the webcam. OpenCV is used to extract
the planar pattern corners from each frame to subpixel
accuracy. The homographies are calculated for each
frame followed by implementation of the proposed
image selection algorithm to identify the SINs. The
planar calibration method of (Zhang, 1999) is used to
verify results.
5 RESULTS
Validation of the SINs is performed by comparison
with randomly drawn INs from the data set. Random
INs (RIN) are used as there are no specific methods
to compare with currently in the literature. Three ex-
periments are conducted to illustrate the calibration
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
92
accuracy and overall benefit of using SINs. The first
experiment examines the accuracy of the calibration
result as the number of views increases. This is fol-
lowed by a rigorous comparison of the IN configura-
tions with less images. The final experiment validates
the calibration accuracy of SINs by analysing the lens
distortion in the images. As there is no ground truth
a calibration result is calculated using all 300 frames
and used as an indicative optimal result for compari-
son.
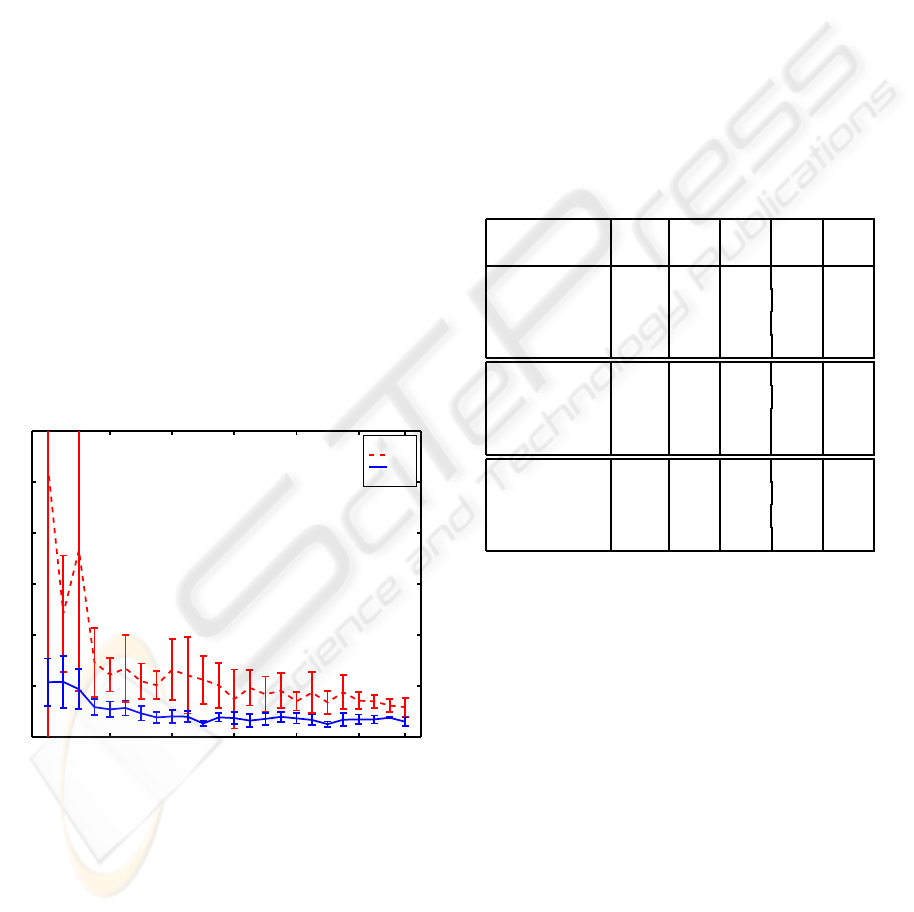
5.1 Convergence of Image Networks
This experiment examines the accuracy of the cali-
bration result as the number of images in the IN in-
creases. The results are given in terms of percentage
error for each calibration result. For each image net-
work instance (2 to 25 INs) ten SINs are compared
with ten RINs from the data set. From Figure 4, it is
evident that the SINs produce more accurate and re-
liable calibration results than the RINs, especially for
the smaller INs. As the number of views increases
the stability of the SIN results clearly outperform the
RINs. The most significant result here is that less im-
ages are needed to achieve accurate calibration results
when SINs are used. The following experiment exam-
ines this in more detail.
2 6 10 14 18 22 25
0
5
10
15
20
25
30
Convergence of SIN v RIN
# Views
Calibration Pixel Error (%)
RIN
SIN
Figure 4: Calibration accuracy as the number of views in-
creases from 2 to 25 INs. Standard deviation is represented
by bars at each IN instance.
5.2 Reduced Number of Images
The number of images for each IN configuration is
reduced for this set of experiments to validate the pre-
vious results which identified that SINs can achieve
more accurate results than the RINs with less images.
All results in Table 1 are given in terms of percentage
error with respect to the indicative optimal calibration
results. There are 50 two INs, 30 three and 25 four
INs in the SIN cases of Table 1. The RINs consist of
2500 randomly drawn image combinations for each
IN size. This consisted of 50 trials of 50 IN instances
for each test. This insured that a wide range of RINs
were compared for the results.
The results in Table 1 indicate that the SINs sig-
nificantly outperform the RINs. This is due to the
geometry of the SINs, which avoid degenerate con-
figurations, and also have favorable image geometry
for solving the calibration equations more efficiently.
This is a significant result in terms of the input re-
quirements for planar camera calibration, by exploit-
ing geometric properties of the images, less input im-
ages are needed to achieve accurate calibration re-
sults.
Table 1: Image Network Configuration Comparison.
Image Network No. fx fy u v
Consensus Images ¯x (σ) ¯x (σ) ¯x (σ) ¯x (σ)
Random 2 23.3 20.7 23.7 23.5
(41.1)(31.5)(44.6)(27.1)
SIN 2 11.5 11.1 13.3 24.1
(11.7)(11.7)(16.6)(26.5)
Random 3 20.2 20.5 24.2 25.1
(30.6)(30.7)(31.4)(31.5)
SIN 3 3.8 3.6 5.3 9.9
(3.9) (4.3) (7.5) (7.9)
Random 4 8.9 8.9 10.8 11.1
(21.1)(21.1)(22.9)(19.4)
SIN 4 1.59 1.49 2.74 3.88
(1.55)(1.69)(3.31)(3.32)
5.3 Distortion Correction
This experiment further justifies the use of the SINs
by analysing distortion in the images. The benefit
of un-distorting the images is that the canonical cali-
bration plane is used as ground truth which gives the
distortion correction residuals. Calibration results us-
ing two INs is used for this experiment since it is
the minimum case for solving planar calibration. The
plots in Figure 5 represent the error vectors of the un-
distortion estimation (scaled by 20 for plots). The
SINs have removed most radial distortion from the
image (mean residual 0.2 pixels) whereas the random
network still has significant distortion present (mean
residual 0.39 pixels).
EFFICIENT PLANAR CAMERA CALIBRATION VIA AUTOMATIC IMAGE SELECTION
93

100 150 200 250 300
50
100
150
Random 2 Image Network
100 150 200 250
50
100
150
Filtered 2 Image Network
Figure 5: Residuals after un-distortion stage (in pixels).
6 CONCLUSIONS
This paper has presented a new approach to choosing
planar calibration images which give accurate calibra-
tion results. This is accomplished by considering ge-
ometric aspects of images in the form of the CL and
thus forming selected image networks (SINs). Unlike
previous image selection methods it does not require a
pre-calibration stage, it simply takes the image set and
calibrates based on the image CLs. This ensures inde-
pendence in the calibration images and avoids degen-
erate configurations. Experimentation has shown that
less input images are needed to achieve efficient re-
sults using SINs. The application presented also pro-
vides a simple means of achieving accurate results for
non-expert practitioners, as the only input needed is
varying the camera location while capturing the im-
ages.
ACKNOWLEDGEMENTS
This research is funded by the Irish Research Council
for Science, Engineering and Technology: funded by
the National Development Plan.
REFERENCES
Bouget, J. (2001). www.vision.caltech.edu/bouguetj/calib.
Faugeras, O. (1993). Three Dimensional Computer Vision:
A geometric Viewpoint. MIT Press.
Gonzalez, J. I., Gmez, J. C., Artal, C. G., and Cabrera, A. N.
(2005). Comparative analysis of calibration methods
for a static camera. WAF05.
Gurdjos, P. (2001). Calibration of a moving camera using a
planar pattern: A centre line-based approach for vary-
ing focal length. In BMVC.
Knuth, D. E. (1998). The Art of Computer Programming,
volume 3. Addison-Wesley, second edition.
OpenCV (2001). intel.com/technology/computing/opencv.
Rupp, S. and Elter, M. (2007). Robust camera calibration -a
generic, optimization-based approach. In VISAPP07.
Salvi, J., Armangue, X., and Batlle, J. (2002). A compara-
tive review of camera calibrating methods with accu-
racy evaluation. Pattern Recognition, 35(7).
Sturm, P. and Maybank, S. (1999). On plane-based camera
calibration: A general algorithm, singularities, appli-
cations. In CVPR99.
Sun, W. and Cooperstock, J. (2007). An empirical evalua-
tion of factors influencing camera calibration accuracy
using three publicly available techniques. MVA.
Tsai, R. (1987). A versatile camera calibration technique for
high-accuracy 3d machine vision metrology using off-
the-shelf tv cameras and lenses. RA, 3(4):323–344.
Wang, J. and Liu, Y. (2006). Characteristic line of planar
homography matrix and its applications in camera cal-
ibration. icpr, 1:147–150.
Wei, G. and Ma, S. (1994). Implicit and explicit camera
calibration: Theory and experiments. PAMI, 16(5).
Zhang, Z. (1999). Flexible camera calibration by viewing a
plane from unknown orientations. In ICCV99.
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
94
