
ESTIMATION OF ASYMMETRY IN 3D FACE MODELS
Natalya Dyshkant and Leonid Mestetskiy
Department of Computational Mathematics and Cybernetics, Lomonosov Moscow State University, Moscow, Russia
Keywords:
Facial asymmetry, Quantitative estimation of asymmetry, Surface comparison, Delaunay triangulation, Mini-
mum spanning tree.
Abstract:
This paper proposes a new estimation of facial asymmetry in 3D face models of humans and an algorithm to
compute it. We consider models derived by 3D scanning method. Each model is given as a cloud of points in
3D space and can be considered as a discrete single-valued function of two variables. We present an approach
for constructing a disparity measure between original face model and its reflected model. Main stages of pro-
posed algorithm are construction Delaunay triangulations of two models and general Delaunay triangulation,
function interpolation on basis of triangulations localization in each other and comparison of functions on sep-
arate triangles of general triangulation. Further using elementary manipulations of reflected model algorithm
searches such position that two models constitute a maximum matching so that the corresponding disparity
measure will be minimal. We carry out computing experiments on database consisting of about 200 face mod-
els. These experiments have indicated that the proposed estimation is stable for different models of one and
the same person.
1 INTRODUCTION
A human face is only approximately bilaterally sym-
metrical with respect to the plane that divides it into
two halves. The aims of this paper are to define a
degree of such approximation, i.e. degree of facial
asymmetry, and to propose an algorithm to compute
it. A problem of facial asymmetry estimation ap-
pears in such applications as preventionism of child
eyesight anomalies (Knizhnikov, 2005), cosmetology
(facial surgery), psychological and medical (includ-
ing dental) research, etc. Hypothesis checking of
correlation between diagnoses made by ophthalmol-
ogist and measures of facial asymmetry is described
in (Murynin, 2004). Also facial asymmetry can im-
prove results of biometric identification (Mitra, 2007)
and facial expression recognition (Teng, 2006) algo-
rithms.
Current 3D imaging technologies allow to re-
ceive three-dimensional models of human faces in
real time.
A model derived by 3D scanning method (see Fig-
ure (1)) is presented as a cloud of point in 3D space
and can be considered as a discrete single-valued
function of two variables z = F(x, y). The z axis rep-
resents front-back displacements of the head. Domain
of each function is a certain discrete set G = {x, y}.
It is proposed to compute sum or mean value of
height difference between points of original and re-
flected 3D models (Liu, 2003) in papers related to fa-
cial asymmetry estimation. This means that values of
two functions (corresponded to original and reflected
models) are known in each point of the set G. Ac-
tually models derived by 3D scanning don’t initially
have such property. So a shortage of proposed estima-
tions is that the preprocessing is required. It can cause
loss of observational accuracy. Moreover, it is impos-
sible to use such estimations for computing disparity
measure between two models when we search such
position that models constitute a maximum match-
ing. Main shortages of existed asymmetry estimation
methods are low numericalefficiency or loss of source
data accuracy. Therefore the problem of facial asym-
metry estimation is still an urgent problem.
In this paper we propose a new estimation of facial
asymmetry that is computable directly from 3D face
model and an algorithm to calculate it. We present
an approach for constructing a disparity measure be-
tween original face model and its reflected model.
Let us remark that functions of original and reflected
models are defined on two different discrete sets. We
use elementary manipulations of reflected model for
searching such its position that corresponds to mini-
mum of disparity measure. Finally, we define quanti-
402
Dyshkant N. and Mestetskiy L. (2009).
ESTIMATION OF ASYMMETRY IN 3D FACE MODELS.
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications, pages 402-405
DOI: 10.5220/0001793804020405
Copyright
c
SciTePress

tative asymmetry estimation of 3D model as the min-
imum disparity measure between this model and its
reflection.
Figure 1: Receiving of 3D model of human face.
Now we introduce the following concept. Dispar-
ity measure between two models is a spacial volume
between the corresponding surfaces. It is also allowed
to use ”weighted” volume. In this case similarity of
some surface patches will have greater weight than
similarity of others. The mathematical problem has
the following content. Suppose surfaces are given by
functions f(x, y) and g(x, y) on discrete sets G
1
and
G
2
respectively, G
1
and G
2
are contained inside a cer-
tain general rectangle R,
ˆ
f(x, y) and ˆg(x, y) are contin-
uous on R analogs of functions f(x, y) and g(x, y), that
are derived by interpolation: ∀(x, y) ∈ G
1
f(x, y) =
ˆ
f(x, y) and ∀(x, y) ∈ G
2
g(x, y) = ˆg(x, y), function
µ(x, y) defines weight of surface fragments in accor-
dance with significance of their similarity, ∆( f, g) —
disparity measure between functions; then we have:
∆( f, g) =
ZZ
R
ˆ
f(x, y) − ˆg(x, y)
µ(x, y)dxdy.
It is required to design a numerically efficient
method to compute this measure that provide good
accuracy. We can obtain acceptable accuracy using
piecewise-linear approximation of surfaces by trian-
gles of Delaunay triangulations of discrete point sets.
Also, there is a problem of efficient computation of
measure for functions when triangulations are con-
structed on different sets of nodes.
Our method based on constructing of new De-
launay triangulation on union of two discrete sets.
As the union process can be implemented in linear
time (Mestetskiy, 2004) then the total time to com-
pute the proposed measure is comparable with time of
constructing Delaunay triangulation, i.e. O(N logN),
where N — the total amount of points in two sets.
Consequently, the proposed method allows to avoid
quadratic search in surface comparison that deter-
mines its advantage and novelty.
2 3D FACE DATABASE
Three-dimensional models used in this research were
derived by 3D scanner developed in ”Artec Group
company”. The database contains 191 models of 8
different persons. All persons have a neutral facial
expression.
Each model is represented as collection of points
with coordinates (x, y, z) in space. All distances have
a scale of one to one, i.e. correspond to real sizes of
a human face. Amount of points in models changes
from 1000 to 3000, and its mean value is about
1500 − 2000.
Each model has been normalized in such a way
that the end of nose coincides with coordinate ori-
gin, the z axis represents front-back displacements of
a head, the y axis — up-downdisplacements (see Fig-
ure (2)). So we may assume that model is bilaterally
located with respect to the Oyz plane. Note that the
described normalization is assumed only as approxi-
mate.
3 ALGORITHMS
General scheme of presented approach is given on
Figure (2).
Figure 2: General scheme and main stages of presented ap-
proach.
After model normalization in the coordinate sys-
tem we construct its symmetrical reflection.
The proposed method of computing a quantitative
estimation of facial asymmetry consists of two stages:
ESTIMATION OF ASYMMETRY IN 3D FACE MODELS
403
1) computing initial estimation as disparity measure
between original and reflected models and 2) correc-
tion of symmetry plane of a model.
3.1 Computing Disparity Measure
between Two Models
Main steps of algorithm for computing disparity mea-
sure between two models are:
1. Delaunay triangulation construction of each dis-
crete set;
2. location of each discrete set in triangulation of the
other set;
3. linear interpolation of each function on the other
set using barometrical coordinates;
4. constructing of general triangulation of two dis-
crete sets on basis of merger algorithm;
5. function comparison on particular cells of the gen-
eral triangulation. Positional relationships of the
spatial triangles given by functions are analyzed
during this comparison .
3.2 Searching Symmetry Plane of
Model
As we assume that model’s normalization in coordi-
nate system is approximate, we try to transform co-
ordinates using small shifts and rotations by small an-
gles about the coordinateaxes. One process of surface
comparison may be implemented very efficiently so it
is possible to organize a guided search of such dis-
crete set’s transformation that provides the maximum
matching. The aim of this correction is to find such
position of the Oyz symmetry plane that the value of
quantitative asymmetry estimation is minimum.
It can be assumed that we minimize estimation not
by all six parameters of elementary manipulations but
only by three of them because it is obvious that shifts
along the y and z axes doesn’t have an influence on
asymmetry estimation and we also don’t consider ro-
tation about the x axis as we have full face photogra-
phy.
We make small transformation of the coordinate
system: shift along the x axis, then rotation by the
angle ϕ about the z axis and, finally, rotation by the
angle ψ about the y axis. In such a way G
1
will trans-
form to G
1
(x, ϕ, ψ) and G
2
— to G
2
(x, ϕ, ψ). f and
g will also be transformed. Denote by Φ(x, ϕ, ψ) =
∆( f(x, ϕ, ψ), g(x, ϕ, ψ)) disparity measure between
transformed surfaces.
The problem of searching the optimal symmetry
plane reduces to minimization of Φ(x, ϕ, ψ). For this
purpose we use alternating-variable descent method
combining with algorithm of golden section.
Notice that function Φ is ravine, i.e. change δ of
variables ϕ or ψ causes a greater change of function
value than the same change δ of variable x. We are
taking into account this property of function during
minimization procedure.
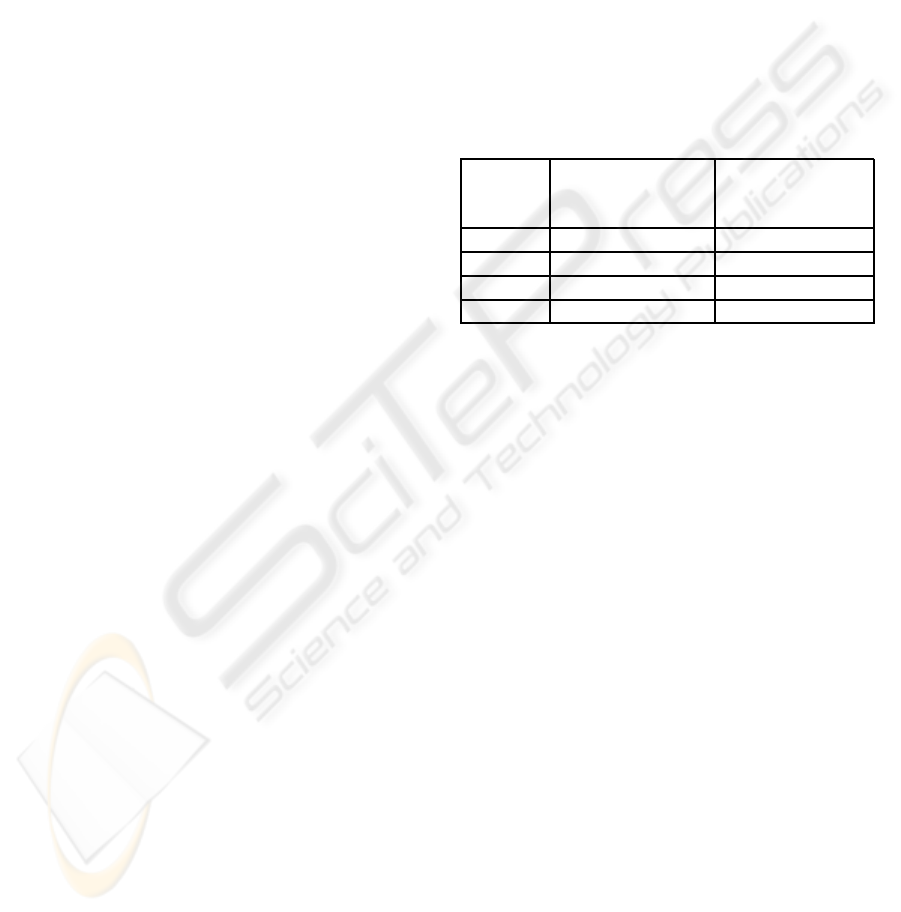
In table 1 there are values of initial estimation of
facial asymmetry (after stage 1) and estimation after
symmetry plane correction for 4 different face models
of one person. To understand significance of these
values let us remark that volume of fluid in tablespoon
is approximately equal to 15000 cmm.
Table 1: Initial and corrected estimations of facial asymme-
try.
Model’s Initial asymmetry Corrected asym-
number estimation (cmm) metry estimation
(cmm)
1 47 466,361 24 072,518
2 49 192,110 25 205,272
3 43 473,767 24 421,316
4 46 280,040 22 263,813
An optimal shift along the x axis is about 2, 4−2, 6
mm for models from the database, values of optimal
angles about the y and z axes are about 0, 015 rad.
4 COMPUTING EXPERIMENTS
The described method for comparison of models was
implemented, and there also has been made multiple
computing experiments for all stages of algorithm.
As experimental estimations have shown, each of
stages, except stage of triangulation constructions,
is implemented in linear for number of mesh nodes
time. Delaunay triangulation is implemented in time
O(N logN). Triangulation construction defines com-
putational complexity of the proposed approach.
Running time for different stages of algorithm
during comparison of human’s face surfaces are ad-
duced in table (2). The three-dimensional portraits
consisting approximately from 3000 points were used
here. Computing experiments were conducted using
AMD Athlon 2600+ processor and 512 Mb operative
memory.
Results of computing experiments on the database
demonstrate that the proposed estimation is stable for
different models of one and the same person.
The experiments indicate that the initial estima-
tion varies strongly for several models od the same
person. Neverthelessthe stage of symmetry plane cor-
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
404

Table 2: Running time for different stages of algorithm.
Stage of algorithm Time (sec)
Construction of two triangulations 0,124
Construction of two MSTs 0,203
Location of triangulations 0,015
Function interpolation < 0,001
Construction of general triangulation 0,109
Computing disparity measure
R
F
1
− F
2
0,031
Total time 0,497
rection increases many times stability of the estima-
tion.
In average for the database spread in values of ini-
tial asymmetry estimation is 36 000-40000 cmm. On
the other hand, spread in values of corrected asymme-
try estimation is 9000-11000 cmm.
To estimate approximation accuracy of real head
model we perform the following experiments. We
compute change of asymmetry estimation of initial
model and model received by thinning, i.e. point re-
jection of the corresponding discrete set. Points for
rejection are selected randomly. Suppose make re-
jection of about 1 500 points of models consisted of
approximately 3 000 points; then asymmetry estima-
tion will not strongly change. After rejection of more
amount of points the asymmetry estimation begins in-
creasing (see Figure (3)).
Figure 3: Facial approximation accuracy.
5 CONCLUSIONS
In this paper we define a quantitative estimation to
compute facial asymmetry directly from 3D face
model. We introduce disparity measure between two
models and compare original face model and reflected
model. We propose algorithms to compute the estima-
tion and to determine the optimal symmetry plane of
model.
The proposed method has the following advan-
tages: computing efficiency, possibility of paralleling.
Besides, the described approach possesses some uni-
versality in comparison with others as it is suitable for
comparison of any models given by functions on dis-
crete sets. The proposed measure can be adapted for
each concrete application, for example, by means of
introducing measure on a surface.
The results of computing experiments carried out
on the database show stability of the proposed estima-
tion for different models of one and the same person
and numerical efficiency of the algorithm.
ACKNOWLEDGEMENTS
The authors are grateful to Gleb Gusev and Si-
mon Karpenko from ”Artec Group Company”
(http://artec-group.com) for given face models. The
research was supported by the Russian Foundation for
Basic Research (grants 08-01-00670, 08-07-00305-
a).
REFERENCES
Knizhnikov, Y. F., H. R. N. (2005). Application of digital
photogrammetry for diagnosing pathology of stereo-
scopic vision (in Russian). Society for Industrial and
Applied Mathematics.
Liu, Y., P. J. (2003). A quantified study of facial asymmetry
in 3d faces. In Robotics Institute, Carnegie Mellon
University, CMU-RI-TR-03-21. Pittsburgh, PA.
Mestetskiy, L., T. E. (2004). Delaunay triangulation: re-
cursion without space division of vertices (in russian).
In Graphicon 2004, International Conference on com-
puter graphics. Moscow.
Mitra, S., L. N. (2007). Understanding the role of facial
asymmetry in human face identification. In Statistics
and Computing, Vol. 17, January, 2007, pp. 57 - 70.
Murynin, A. B., K. V. F. (2004). Estimation of bilateral fa-
cial symmetry breaking using a stereoscopic computer
vision system. In Graphicon 2004, International Con-
ference on computer graphics. Moscow.
Teng, K. (2006). Expression classification using wavelet
packet method on asymmetry faces. In tech. report
CMU-RI-TR-06-03, Robotics Institute. Carnegie Mel-
lon University.
ESTIMATION OF ASYMMETRY IN 3D FACE MODELS
405
