ROAD INTERPRETATION FOR DRIVER ASSISTANCE BASED ON
AN EARLY COGNITIVE VISION SYSTEM
Emre Bas¸eski
†
, Lars Baunegaard With Jensen
†
, Nicolas Pugeault
†
, Florian Pilz
±
Karl Pauwels
‡
, Marc M. Van Hulle
‡
, Florentin W
¨
org
¨
otter
∗
and Norbert Kr
¨
uger
†
†
The Mærsk Mc-Kinney Møller Institute, Univeristy of Southern Denmark, Odense, Denmark
±
Department for Media Technology, Aalborg University Copenhagen, Copenhagen, Denmark
‡
Laboratorium voor Neuro- en Psychofysiologie, K.U.Leuven, Belgium
∗
Bernstein Center for Computational Neuroscience, University of G
¨
ottingen, G
¨
ottingen, Germany
Keywords:
Large scale maps, Lane detection, Independently moving objects.
Abstract:
In this work, we address the problem of road interpretation for driver assistance based on an early cognitive
vision system. The structure of a road and the relevant traffic are interpreted in terms of ego-motion estimation
of the car, independently moving objects on the road, lane markers and large scale maps of the road. We make
use of temporal and spatial disambiguation mechanisms to increase the reliability of visually extracted 2D and
3D information. This information is then used to interpret the layout of the road by using lane markers that are
detected via Bayesian reasoning. We also estimate the ego-motion of the car which is used to create large scale
maps of the road and also to detect independently moving objects. Sample results for the presented algorithms
are shown on a stereo image sequence, that has been collected from a structured road.
1 INTRODUCTION
A driver assistance system or an autonomous vehicle
requires a road interpretation in terms of layout of the
road and the relevant traffic. The main elements of
such a road interpretation can be summarized as a)
the lanes of the road, b) the rigid body motion esti-
mation of the car, c) independently moving objects
(IMOs) on the road and d) large scale maps of the
road. In this article, we present algorithms for all the
sub-problems, based on information provided by an
early cognitive vision system (Kr
¨
uger et al., 2004).
We make use of visually extracted data from a stereo
camera system. A hierarchical visual representation is
created to interpret the whole scene in 2D and 3D. We
then make use of temporal and spatial disambiguation
mechanisms to increase the reliability of the extracted
information. The layout of the street is calculated
from the disambiguated data by using Bayesian rea-
soning. The ego-motion estimation of the car is done
within the same representation and this information is
used to create large scale semantic maps of the road as
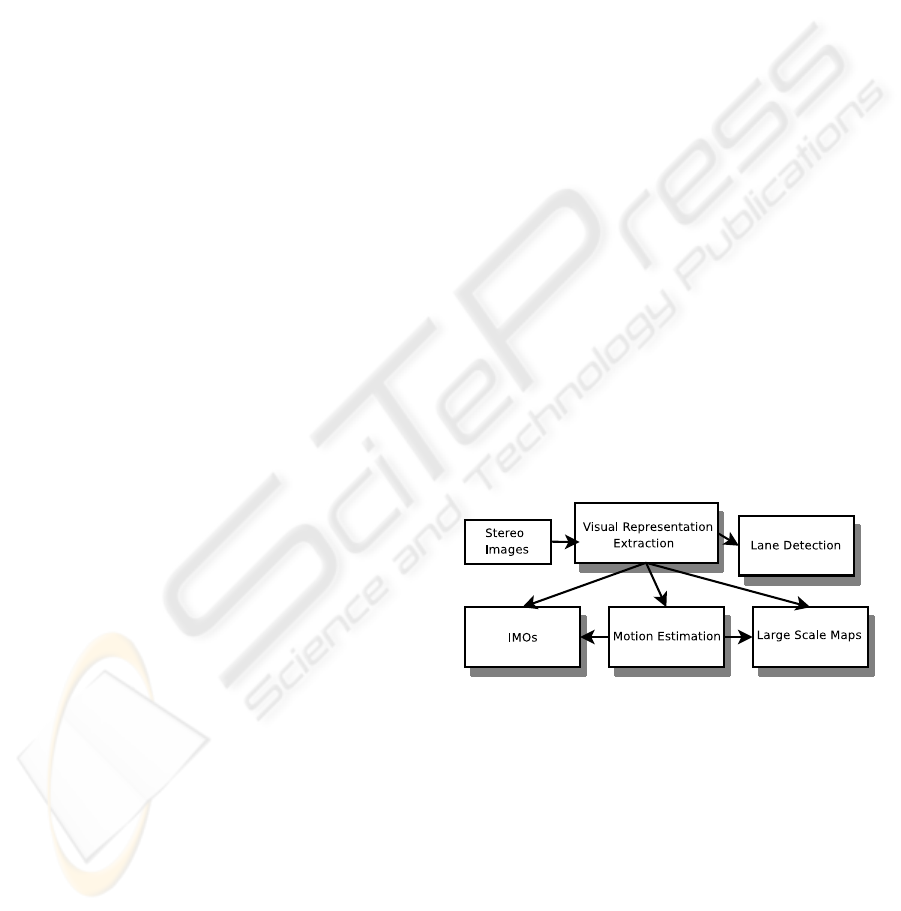
well as to detect and interpret the IMOs. In Figure 1,
Figure 1: General overview of the system.
the general overview of the extraction process of the
whole interpretation is presented. Note that, all sub-
parts of the system use the same visual representation
based on an early cognitive vision system.
Lane detection and parametrization, in particu-
lar in 3D, is acknowledged to be a difficult prob-
lem on which a lot of research is performed currently
(Bertozzi and Broggi, 1998; Wang et al., 2004; Mc-
Call and Trivedi, 2004). The difficulty comes from
a) the extraction of relevant information in far dis-
tances, b) the extraction of 3D information (in partic-
ular in hilly environments), and c) poor image qual-
ity and highly varying lightning conditions (leading,
496
Ba¸seski E., Baunegaard With Jensen L., Pugeault N., Pilz F., Pauwels K., M. Van Hulle M., Wörgötter F. and Krüger N. (2009).
ROAD INTERPRETATION FOR DRIVER ASSISTANCE BASED ON AN EARLY COGNITIVE VISION SYSTEM.
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications, pages 496-505
DOI: 10.5220/0001796104960505
Copyright
c
SciTePress

Figure 2: Satellite image of the road from which the reference stereo image sequence has been collected.Note that, the driving
direction is from left to right.
e.g., to cast shadows). For 2D and 3D lane inter-
pretation, there are already systems build into cars
(see (Bertozzi et al., 2000) for an overview) which
however only give information at the current position
while for driving future positions and other parame-
ters (such as curvature) are of importance.
Moreover, besides the interpretation of the lane
itself, the motion and shape of independently mov-
ing objects (IMOs) need to be integrated into such
lane descriptions which, especially in 3D, is a very
hard problem since not only the scene needs to be
segmented into IMOs and non-IMOs but also the 6D
motion vector as well as the shape of the IMOs need
to be computed based on only the small image areas
the IMOs appear in. Current approaches towards this
problem typically integrate object detection, tracking,
and geometrical constraints (see e.g., (Leibe et al.,
2007)). Such methods crucially rely on object de-
tection, which is very difficult for small or distant
objects. Our method on the other hand, can pro-
vide the required higher precision by integrating mul-
tiple dense cues, namely dense disparity, dense op-
tical flow, and self-motion derived from this optical
flow. The methods used to obtain these cues (see e.g.,
(Pauwels and Van Hulle, 2008)) are robust to typi-
cal nuisance factors observed in real-world video se-
quences recorded by moving observers, such as con-
trast changes, unstable camera motion, and ambigu-
ous camera motion configurations.
The ego-motion estimation of the car is not only
crucial for extraction of IMOs but also for creating 3D
maps of the road. These maps are similar to SLAM
(see e.g., (Lemaire et al., 2007)) applications and they
can be used to generate global driving events like the
car’s trajectory. Also, this kind of maps are important
in terms of learning the behavior of the driver to use
for driver assistance.
The extraction of such complex information is
time-consuming. In our approach, real-time is not
thought to be achieved through simplification of pro-
cesses via specializing on sub-aspects, but by parallel
processing on hardware. In this context, we have de-
veloped a hybrid architecture similar to (Jensen et al.,
2008), consisting of different FPGAs as well as a
coarse parallel computer.
The results explained in this article are also to be
seen as a first step towards reasonable benchmark-
ing in the driver assistance domain. It has been dis-
cussed in, e.g., (Hermann and Klette, 2008; Klette,
2008), that the currently used benchmarks in the com-
puter vision community are very suitable to evalu-
ate stereo and optic flow algorithms in controlled en-
vironments but are not very suitable to evaluate al-
gorithms in the context of driver assistance systems
since the demands are very different from the exist-
ing benchmarks. On the other hand, Klette et al. is
in the process of establishing appropriate standard se-
quences of realistic complexity that are published on
’http://www.citr.auckland.ac.nz/6D/’ where also the
sequence on which we show results in this paper is
available. In this way, we think this paper fosters the
process of comparing results on realistic databases for
driver assistance.
The rest of the article is organized as follows: In
Section 2, the early cognitive vision system that has
been used for this work is explained briefly. The al-
gorithms for the sub-parts of the road interpretation
motion estimation, large scale maps, lane detection
and independently moving objects are presented in
Sections 3, 5, 6 and 7 respectively while the disam-
biguation process is discussed in Section 4. Note
that, for evaluation of the presented algorithms, sam-
ple results are demonstrated on a reference sequence
of stereo images collected from a driving on the road
that is shown in Figure 2. We conclude with a discus-
sion on these sample results in Section 8.
2 VISUAL REPRESENTATIONS
In this work we use a representation of visual in-
formation based on local descriptors called ‘primi-
tives’ (Kr
¨
uger et al., 2004). Primitives are extracted
sparsely along image contours, and form a feature
vector aggregating multiple visual modalities such as
position, orientation, phase, color and optical flow.
This results in the following feature vector:
π = (x, θ,φ,(c
l
,c
m
,c
r
),f) (1)
Image contours are therefore encoded as collinear
strings of primitives. Because of that, collinear and
ROAD INTERPRETATION FOR DRIVER ASSISTANCE BASED ON AN EARLY COGNITIVE VISION SYSTEM
497

similar primitives are denoted as ‘groups’ in the fol-
lowing. These are matched across two stereo views,
and pairs of corresponding 2D-primitives afford the
reconstruction of a 3-dimensional equivalent called
3D–primitive, and encoded by the vector:
Π = (X, Θ,Φ,(C
l
,C
m
,C
r
)) (2)
Moreover, if two primitives are collinear and simi-
lar in an image, and their correspondence in the sec-
ond image are also, then the two reconstructed 3D-
primitives are grouped. Extracted 2D and 3D primi-
tives for a sample stereo image pair are illustrated in
Figure 3.
3 MOTION ESTIMATION
In the driving context, rigid body motion is prevalent.
In our work, the motion is estimated using a combi-
nation of SIFT (Lowe, 2004) and primitives features
(see Section 2) in a RANSAC (Fischler and Bolles,
1981) scheme. SIFT features are scale invariant fea-
tures that have been very successfully applied to a
variety of problems during the recent years. They
afford to be matched very robustly across different
views, and provide a robust basis to the motion esti-
mation scheme. On the other hand, their localisation
is imprecise. The primitives provide very accurate
(sub–pixel) localisation, but are less readily matched.
Moreover, because the primitives are local contour
descriptors they only provide motion information in
the direction normal to the contour’s local orienta-
tion. This is an issue in a driving scenario where the
main features, the road lines, are mostly radially dis-
tributed from the car’s heading direction. This means
that most of the extracted primitives yield very lit-
tle information about translation in the z axis. This
limitation can be remediated by using a mixture of
features for motion estimation. In this work, we in-
tegrated both features in a RANSAC scheme, where
SIFT are used for the initial estimation, and the con-
sensus are formed using a combination of SIFT and
primitives. For the motion estimation algorithm we
chose (Rosenhahn et al., 2001), since in addition of
being able to deal with different visual entities, it does
optimization using a twist formulation which directly
acts on the parameters of rigid-body motions.
The results presented in this chapter contain mo-
tion estimation results for feature sets consisting of
primitives, SIFT and a combination of both. Results
are shown in Figure 4, where each column depicts
the translational and rotational motion components
for one type of feature set.
The first row in Figure 4 depicting the transla-
tion, the z-axis corresponds to the car’s forward mo-
tion. Here, results show that SIFT and the combina-
tion of SIFT and primitives provide much more sta-
ble results. However outliers still remain, caused by
speed-bumps, potholes etc. These results in blurred
images as on frame 720-730 caused by a bump on the
bridge, making matching and motion estimation a dif-
ficult task.
The second row in Figure 4 depicts the rota-
tional component where y-axis corresponds to rota-
tion caused by steering input. The rotation results for
the y-axis using SIFT and the combination of SIFT
and primitives nicely corresponds to the satellite im-
age presented in Figure 2. This correspondence be-
tween sub-parts of the road and sub-parts of the mo-
tion estimation plot is shown in Figure 10 (b). Fig-
ure 5 shows translation and rotation obtained after ap-
plying a Bootstrap Filter (Gordon et al., 1993) (us-
ing 1000 particles). This results in the elimination of
the largest variations in the estimated motions and to
more stable results.
4 DISAMBIGUATION
Since 3D-primitives are reconstructed from stereo,
they suffer from noise and ambiguity. Noise is due to
the relatively large distance to the objects observed,
and the relatively small baseline of the stereo rig (33
cm). The ambiguity rises from the matching prob-
lem: despite their multi-modal aspect, the primitives
only describe a very small area of the image, and
similar primitives abound in an image. The epipo-
lar constraint limits the matching problem, yet it is
unavoidable that some ambiguous stereo matches oc-
cur (Faugeras, 1993). We introduce two means of
disambiguation making use of temporal (Section 4.1)
and spatial (Section 4.2) regularities employed by the
early cognitive vision system.
4.1 Temporal Disambiguation
A first means of disambiguation is to track prim-
itives over time. We perform this tracking in the
3D space, to reduce the likelihood of false positives.
This involves resolving three problems: first, estimat-
ing the motion; second, matching predicted and ob-
served primitives; and third, accumulating represen-
tation over time.
Using the 3D-primitives extracted at a time t and
the computed ego–motion of the car between times
t and t + δt, we can generate predictions for the vi-
sual representation at time t + δt. Moreover, conflict-
ing hypotheses (reconstructed from ambiguous stereo
matches) will generate distinct predictions. In most
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
498
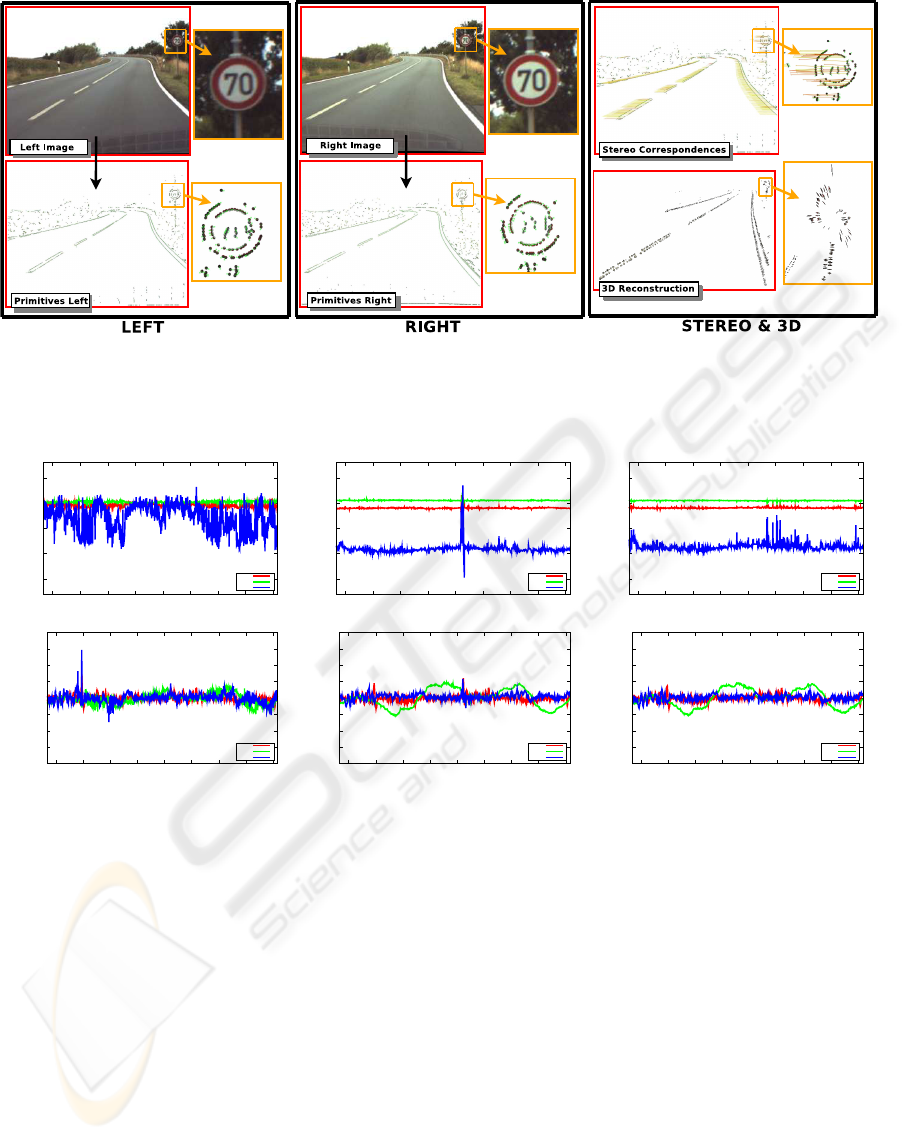
Figure 3: Extracted 2D and 3D primitives for a sample image pair. Note that, 2D primitives are used to reconstruct 3D
primitives.
Primitives SIFT Primitives and SIFT
−1500
−1000
−500
0
500
300 400 500 600 700 800 900 1000 1100
translation in mm
frame
s_06a_01#000: Primitives − Translation Parameters
Tx
Ty
Tz
−1500
−1000
−500
0
500
300 400 500 600 700 800 900 1000 1100
translation in mm
frame
s_06a_01#000: SIFT − Translation Parameters
Tx
Ty
Tz
−1500
−1000
−500
0
500
300 400 500 600 700 800 900 1000 1100
translation in mm
frame
s_06a_01#000: Combined − Translation Parameters
Tx
Ty
Tz
−0.02
−0.015
−0.01
−0.005
0
0.005
0.01
0.015
0.02
300 400 500 600 700 800 900 1000 1100
rotation in radians
frame
s_06a_01#000: Primitives − Rotation Parameters
Rx
Ry
Rz
−0.02
−0.015
−0.01
−0.005
0
0.005
0.01
0.015
0.02
300 400 500 600 700 800 900 1000 1100
rotation in radians
frame
s_06a_01#000: SIFT − Rotation Parameters
Rx
Ry
Rz
−0.02
−0.015
−0.01
−0.005
0
0.005
0.01
0.015
0.02
300 400 500 600 700 800 900 1000 1100
rotation in radians
frame
s_06a_01#000: Combined − Rotation Parameters
Rx
Ry
Rz
Figure 4: Motion estimation results for different feature sets over the entire stereo image sequence (frame 267-1116).
cases, only one of these predictions will be confirmed
by the visual representation observed at instant t + δt.
This means that, over a few frames, stereo correspon-
dences can be disambiguated by tracking. We com-
bined the tracking information into one accumulated
likelihood measure that we use to discard unlikely hy-
potheses (Pugeault et al., 2008). On the other hand,
primitives that achieve a high enough likelihood are
flagged as correct, and preserved even if they there-
after leave the field of view or become occluded.
4.2 Spatial Disambiguation via NURBS
Parametrization
The second disambiguation scheme employed here
is using the collinear groups formed in both images.
Stereo matches that do not agree with the group struc-
ture of a primitive are discarded, leading to a reduc-
tion of ambiguity (Pugeault et al., 2006).
Moreover, it is advantageous to have an explicit
parameterization of collinear groups to allow for a
controlled and more condensed description of such
entities as well as for having a good control over pa-
rameters such as position, orientation and curvature
along these structures. NURBS (Non-uniform Ratio-
nal B-Splines) (Piegl and Tiller, 1995) has been cho-
sen as a suitable mathematical framework since it is
invariant under affine as well as perspective trans-
formations, can be handled efficiently in terms of
memory and computational power and offer one com-
mon mathematical form for both standard analytical
shapes and free-form shapes. Note that, these proper-
ties hold true for 3D as well as 2D data.
NURBS parametrization is not used only for an-
ROAD INTERPRETATION FOR DRIVER ASSISTANCE BASED ON AN EARLY COGNITIVE VISION SYSTEM
499
-1500
-1000
-500
0
500
300 400 500 600 700 800 900 1000 1100
translation in mm
frame
s_06a_01#000: Combined Filtered - Translation Parameters
T
X
T
Y
T
Z
-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
300 400 500 600 700 800 900 1000 1100
rotation in radians
frame
s_06a_01#000: Combined Filtered - Rotation Parameters
R
X
R
Y
R
Z
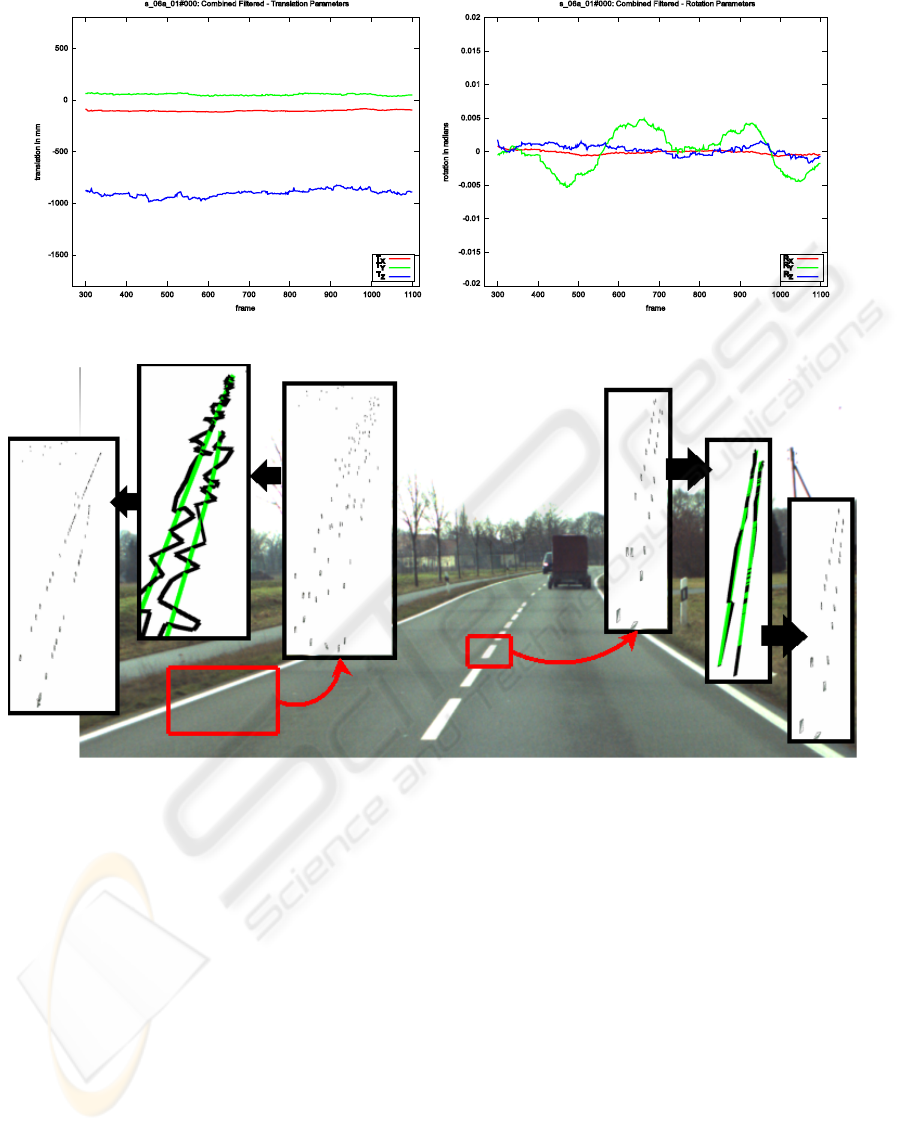
Figure 5: Motion estimation results after applying Bootstrap filter to results in Figure 4.
Figure 6: Position and orientation correction of 3D features by using NURBS. Green lines represent NURBS and black lines
represent groups of features.
alytical calculations that are necessary to create the
lane parametrization described in Section 6, but also
used for disambiguation in terms of position and ori-
entation correction of 3D features. The correction
procedure is illustrated in Figure 6. After fitting
NURBS (represented as green lines) to groups of 3D
features (represented as black lines), position and ori-
entation of each feature is recalculated. The proce-
dure is shown on a good reconstruction (middle road
marker) as well as a bad one (left lane marker).
5 LARGE SCALE SEMANTIC
MAPS
One additional information provided by tracking is
that it allows us to identify new information that is not
tracked yet. All observed 3D-primitives that are not
matched with one pre-existing, tracked 3D-primitive
are added to the accumulated representation. This
allows for integrating visual information over larger
scales (Pugeault et al., 2008), in a manner similar to
SLAM applications. The difference being here that
the features densely describe the shape of the visual
world, rather than being mere clouds of landmarks.
This allows, over a scale of a few seconds for gen-
erating a richer representation of more global driv-
ing events, like road curvature, and the car’s trajec-
tory. The accumulated representation on the driving
sequence in Figure 2 is shown in Figure 7, from dif-
ferent perspectives and at different points of the road.
The first (top-left) image shows the whole road seg-
ment (in perspective).
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
500
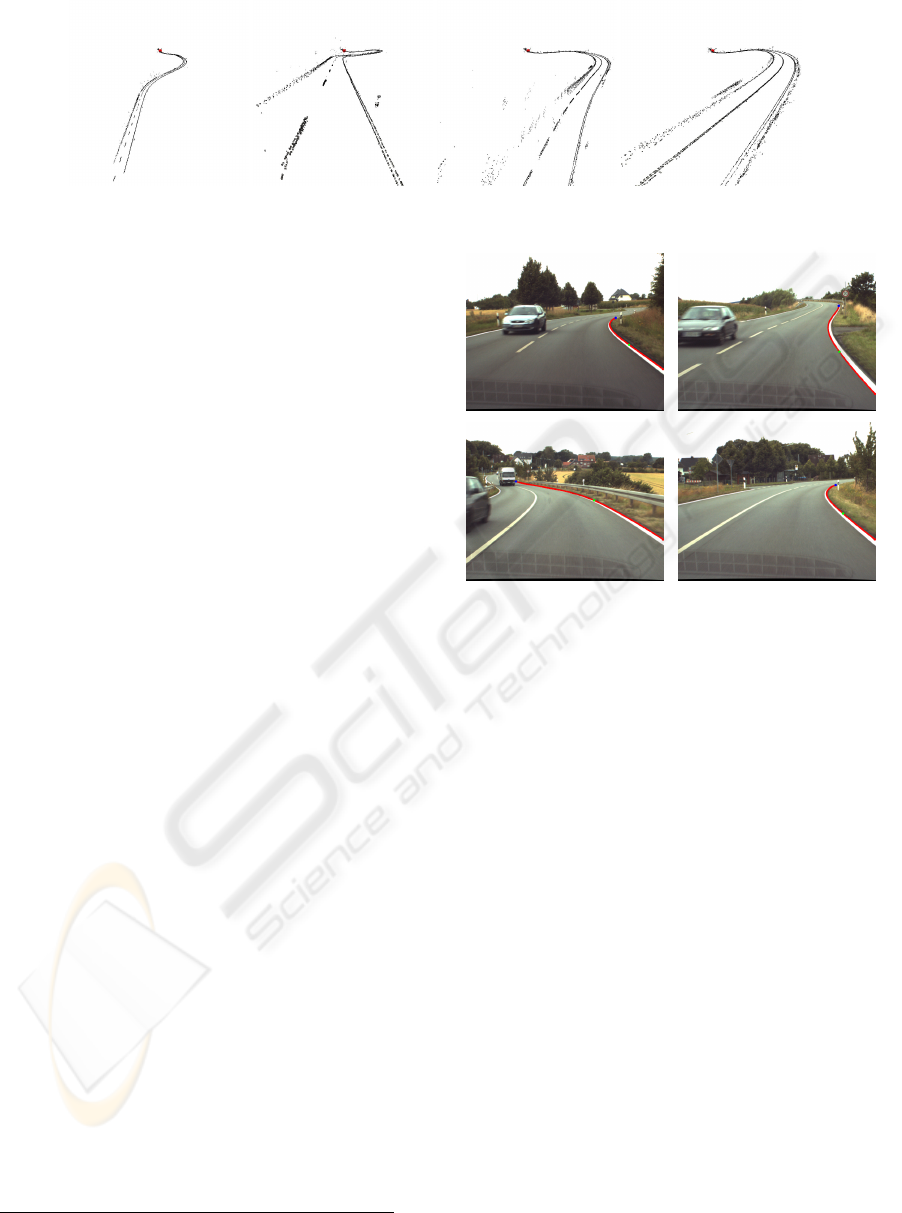
Figure 7: Large scale accumulation: four different viewpoints on the accumulated maps after 1000 frames ( 40s.).
6 BAYESIAN LANE FINDING
AND PARAMETRIZATION
In this section, a framework for finding road
lane markers based on Bayesian reasoning and
parametrization of the lanes in terms of feature vec-
tors are discussed. The visual representation dis-
cussed in Section 2 does not only provide local im-
age features but also provides relations between these
features (Bas¸eski et al., 2007) (e.g., proximity, cocol-
ority, distance). We want to find the primitives con-
stituting the lane in a process combining the different
relations.
To merge the different cues/relations as well as to
deal with the uncertainties present in a vision system,
we make use of a Bayesian framework. The advan-
tage of Bayesian reasoning is that it allows us to:
• make explicit statements about the relevance of
properties/relations for a certain object,
• introduce learning in terms of prior and condi-
tional probabilities, and
• assess the relative importance of each type of re-
lation for the detection of a given object, using the
prior probabilities.
Let P(e
Π
i
) be the prior probability of the occur-
rence of an event e
Π
i
(e.g., the probability that a primi-
tive lies in the ground plane, or that two primitives are
coplanar, collinear or have a certain distance to each
other).Then, P(e
Π
i
|Π ∈ O) is the conditional probabil-
ity of the visual event e
i
given an object O.
Our aim is to compute the likelihood of a primitive
Π being part of an object O given a number of visual
events relating to the primitive:
P(Π ∈ O |e
Π
i
). (3)
According to Bayes formula, equation 3 can be
expanded to:
P(e
Π
i
|Π ∈ O )P(Π ∈ O)
P(e
Π
i
|Π ∈ O )P(Π ∈ O) + P(e
Π
i
|Π /∈ O )P(Π /∈ O)
.
(4)
Figure 9: Extracted right lanes (shown in red) for some im-
ages in the reference sequence.
Using this framework for detecting lanes, we first
need to compute prior probabilities. This is done by
hand selecting the 3D primitives being part of a lane
in a range of scenes and calculating the different rela-
tions and attributes for these selections. The resulting
probabilities will reveal which relations and attributes
are relevant for detecting this object.
Figure 8 shows the results of using the Bayesian
framework with the relevant relations for detecting
lane markers in an outdoor scene.
After finding the 3D features that potentially be-
long to the road by using Bayesian reasoning, the
right lane of the road is extracted by using small
heuristics in 2D. Since the lane starts as two sepa-
rate stripes and becomes a single line further from the
camera, we eliminate the short groups that are neigh-
bor to a long group if the color distribution between
the two groups is uniform. After eliminating the short
groups, we select the group closest to the bottom-right
corner of the image as the right lane. Note that, al-
though the potential street lanes were found in 3D via
Bayesian reasoning, the hierarchy in the representa-
tion allows us to do reasoning in 2D for the last step
by using the link between 3D and 2D groups. In Fig-
ure 9, some results that show the right lane of the road
are presented. Once the right lane of the road is de-
ROAD INTERPRETATION FOR DRIVER ASSISTANCE BASED ON AN EARLY COGNITIVE VISION SYSTEM
501

(a) Original outdoor image (b) Extracted primitives (c) Selected primitives
Figure 8: Extracting the lane in an outdoor scenario
tected, it is necessary to create a parametrization of
the lane so that it can be used for driver assistance.
The idea is to represent certain locations of the lane
as a feature vector, depending on the dimension of
the data. In 2D, the feature vector is v
y
l
= [x
l
,κ
l
,s
l
]
where x
l
is the x coordinate corresponding to a fixed
y coordinate y
l
on the lane and κ
l
, s
l
are the curvature
and slope at point (x
l
,y
l
) respectively. Note that, for
a curve given parametrically as c(t) = (x(t), y(t)), the
curvature is defined as:
κ =
|x
0
y
00
− y
0
x
00
|
(
p
x
0
2
+ y
0
2
)
3
(5)
In 3D, the feature vector is V
Z
l
= [X
l
,Y
l
,i
l
, j
l
,k
l
] where
(X
l
,Y
l
) is the x and y coordinates corresponding to
a fixed Z coordinate Z
l
on the lane and [i
l
, j
l
,k
l
] is
the tangent vector at point (X
l
,Y
l
,Z
l
). Note that, fit-
ting NURBS to the right lane plays an important role
in these calculations since it allows applying similar
procedures for both 2D and 3D data. Also, analytical
calculations like derivation is more stable and easy to
compute when NURBS is used.
In Figure 10(d-f), the 2D lane parameter extrac-
tion results are presented for the reference sequence
collected from the road shown in Figure 2. For each
image in the sequence, a 2D feature vector has been
found from the right lane for y coordinate equals to
500 pixels. The road has two sharp right turns and
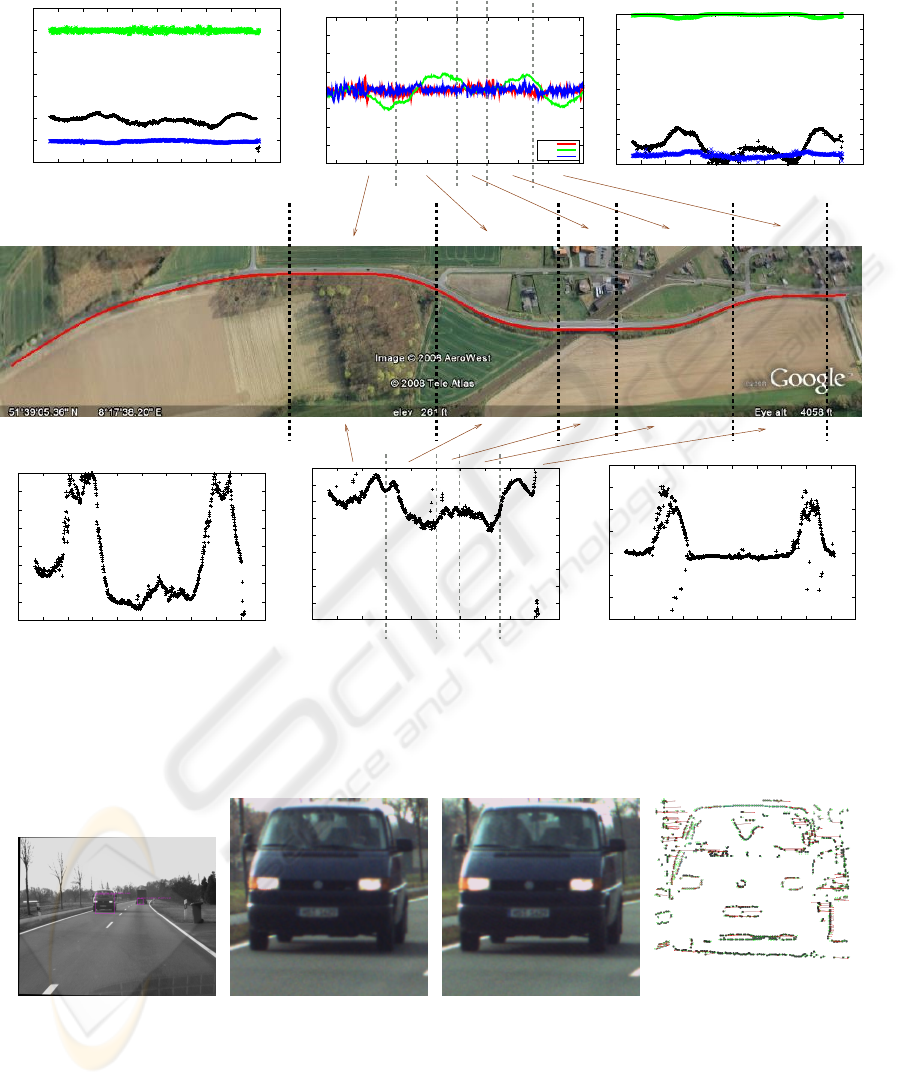
one less sharp left turn with the order right, left, right.
The plots regarding the slope and x coordinate show
all three turns as shown in Figure 10 (d) and (e). On
the other hand, the plot for curvature (Figure 10 (f))
can show only two sharp right turns and gives slight
indication of left turn. Position and tangent vector de-
scribe the structure of the road in 3D as well, as shown
in Figure 10 (a) and (c).
7 INDEPENDENTLY MOVING
OBJECTS
One important source of information in a driving con-
text lies with the other vehicles (and more generally
all other moving objects), their detection, tracking and
identification. In this work, Independently Moving
Objects (IMOs) are detected by subtracting the optic
flow introduced by the car’s self-motion from the ob-
served optical flow as described in (Pauwels, 2008).
This provides a list of IMOs, with appropriate bound-
ing boxes (BB). We use this information to segment
the image in areas (background and IMOs) where vi-
sual information is extracted and accumulated sepa-
rately (as in Section 4.1).
Figure 11 illustrates the IMO handling module of
the system. In (a) the detected IMOs are identified
by bounding boxes and an unique ID; (b) the left im-
age patch contained in the IMO’s BB is extracted and
magnified to increase resolution; (c) the right BB’s
location is estimated using the mean disparity of the
primitives in the left BB, and the corresponding patch
in the right image is also extracted and magnified; (d)
new primitives are extracted on the magnified images
and matched across both patches. The stereo matches
are used for reconstructing 3D-primitives, as before,
and accumulated over time.
Figure 12 shows the segmentation of the IMOs.
On the left, the figure shows a detail of the accumu-
lated road. The IMO has been segmented out. On
the right the accumulated representation of the IMO
is also displayed in the same coordinate system. Fig-
ure 13 shows the accumulated background and one
of the IMOs, with the associated trajectories (rep-
resented as the red and green string of arrows); (a)
shows only the accumulated background and the ego-
motion; (b) and (c) also show the accumulated IMO
and its trajectory; (d) shows the IMO’s estimated tra-
jectory, from above. The car’s egomotion averages
to 65 km/h on this sequence, whereas the IMO’s mo-
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
502
(b) (c)
(d)
(f)(e)
frame
position
(a)
tangent
frame
+
x
*
*
x
+
tangent
frame
frame
position
frame
curvature
−0.02
−0.015
−0.01
−0.005
0
0.005
0.01
0.015
0.02
300 400 500 600 700 800 900 1000 1100
rotation in radians
frame
Rx
Ry
Rz
−5000
0
5000
10000
15000
20000
25000
30000
200 300 400 500 600 700 800 900 1000 1100 1200
POSITION_y
POSITION_x
POSITION_z
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
200 300 400 500 600 700 800 900 1000 1100 1200
TANGENT_i
TANGENT_j
TANGENT_k
10
20
30
40
50
60
70
80
90
200 300 400 500 600 700 800 900 1000 1100 1200
200
300
400
500
600
700
800
900
1000
1100
200 300 400 500 600 700 800 900 1000 1100 1200
−0.015
−0.01
−0.005
0
0.005
0.01
0.015
0.02
200 300 400 500 600 700 800 900 1000 1100 1200
Figure 10: Motion of the car from different sources (2D-3D lane parameters and ego motion estimation). (a)-(c) (x,y,z)
coordinates and components of the tangent vector of the 3D lane for z = 25meters on the whole reference sequence. (b) Ego
motion estimation for rotation by using combination of SIFT and primitives. (d-f) 2D lane parameters for y = 500pixels on
the whole reference sequence. (d) slope (e) x coordinate (f) curvature.
Figure 11: IMOs processing. (a) IMO list and BBs (b) left image segment, (c) right image segment, (d) extracted primitives
and stereo correspondences.
ROAD INTERPRETATION FOR DRIVER ASSISTANCE BASED ON AN EARLY COGNITIVE VISION SYSTEM
503

Figure 12: Segmentation and reconstruction of an IMO: left shows the accumulated map of the road, where IMOs are seg-
mented out; right shows the accumulated representation of the IMO, on the same coordinate system.
Figure 13: One IMO in a semantic map and its trajectory. (a) shows only the accumulated background and the car’s egomotion;
(b) and (c) show in addition the accumulated IMO and its trajectory, under different viewpoints; and (d) shows the IMO’s
trajectory viewed from above.
tion averages at 80 km/h. In those results one see
that the IMOs can be segmented and tracked. The use
of dense method for detection and tracking provides
robustness, and the use of symbolic features for accu-
mulation provides consistency to the system.
8 CONCLUSIONS
We have discussed four algorithms as sub-parts of a
road interpretation, based on visually extracted data,
provided by an early cognitive vision system. After
increasing the reliability of 2D and 3D information
by using temporal and spatial disambiguation mecha-
nisms, lane markers of the road are detected and the
ego-motion of the car is estimated. While having the
ego-motion in hand, large scale maps of the road and
independently moving objects on the road are created.
The potential of the presented algorithms has been
demonstrated on a stereo image sequence, collected
from a structured road. We have shown that the resul-
tant large scale map, as well as the estimated motion
and the detected lane parameters are consistent with
the satellite image. Note that, all sub-tasks use only
visually extracted information and all parts of this in-
formation are provided by the same representation.
ACKNOWLEDGEMENTS
This work has been supported by the European Com-
mission - FP6 Project DRIVSCO (IST-016276-2) and
the national Danish project NISA.
REFERENCES
Bas¸eski, E., Pugeault, N., Kalkan, S., Kraft, D., W
¨
org
¨
otter,
F., and Kr
¨
uger, N. (2007). A Scene Representation
Based on Multi-Modal 2D and 3D Features. ICCV
2007 Workshop on 3D Representation for Recognition
3dRR-07.
Bertozzi, M. and Broggi, A. (1998). GOLD: A Parallel
Real-Time Stereo Vision System for Generic Obstacle
and Lane Detection. Image Processing, IEEE Trans-
actions on, 7(1):62–81.
Bertozzi, M., Broggi, A., and Fascioli, A. (2000). Vision-
based Intelligent Vehicles: State of the Art and
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
504

Perspectives. Robotics and Autonomous Systems,
32(1):1–16.
Faugeras, O. (1993). Three-Dimensional Computer Vision:
A Geometric Viewpoint. MIT Press.
Fischler, R. and Bolles, M. (1981). Random Sample Con-
sensus: A Paradigm for Model Fitting with Applica-
tions to Image Analysis and Automated Cartography.
Communications of the ACM, 24(6):619–638.
Gordon, N., Salmond, D., and Smith, A. (1993). Novel
Approach to nonlinear/non–Gaussian Bayesian State
Estimation. In IEE Proceedings-F, volume 140, pages
107–113.
Hermann, S. and Klette, R. (2008). A Study on Parameteri-
zation and Preprocessing for Semi-Global Matching.
Technical Report Number 221, Computer-Science
Department of The University of Auckland, CITR.
Jensen, L. B. W., Kjær-Nielsen, A., Alonso, J. D., Ros, E.,
and Kr
¨
uger, N. (2008). A Hybrid FPGA/Coarse Par-
allel Processing Architecture for Multi-modal Visual
Feature Descriptors. ReConFig’08.
Klette, R. (2008). Stereo-Vision-Support for Intelligent Ve-
hicles - The Need for Quantified Evidence. Technical
Report Number 226, Computer-Science Department
of The University of Auckland, CITR.
Kr
¨
uger, N., Lappe, M., and W
¨
org
¨
otter, F. (2004). Bi-
ologically Motivated Multi-modal Processing of Vi-
sual Primitives. The Interdisciplinary Journal of Ar-
tificial Intelligence and the Simulation of Behaviour,
1(5):417–428.
Leibe, B., Cornelis, N., Cornelis, K., and Van Gool, L.
(2007). Dynamic 3D Scene Analysis from a Moving
Vehicle. Computer Vision and Pattern Recognition,
2007. CVPR ’07. IEEE Conference on, pages 1–8.
Lemaire, T., Berger, C., Jung, I.-K., and Lacroix, S.
(2007). Vision–Based SLAM: Stereo and Monocu-
lar Approaches. International Journal of Computer
Vision, 74(3):343–364.
Lowe, D. (2004). Distinctive Image Features from Scale-
Invariant Keypoints. International Journal of Com-
puter Vision, 2(60):91–110.
McCall, J. and Trivedi, M. (2004). An Integrated, Robust
Approach to Lane Marking Detection and Lane Track-
ing. pages 533–537.
Pauwels, K. (2008). Computational Modeling of Visual At-
tention:Neuronal Response Modulation in the Thala-
mocortical Complex and Saliency-based Detection of
Independent Motion. PhD thesis, K.U.Leuven.
Pauwels, K. and Van Hulle, M. M. (2008). Optic Flow from
Unstable Sequences through Local Velocity Con-
stancy Maximization. Image and Vision Computing,
page in press.
Piegl, L. and Tiller, W. (1995). The NURBS Book. Springer-
Verlag, London, UK.
Pugeault, N., W
¨
org
¨
otter, F., and Kr
¨
uger, N. (2006). Multi-
modal Scene Reconstruction Using Perceptual Group-
ing Constraints. In Proc. IEEE Workshop on Percep-
tual Organization in Computer Vision (in conjunction
with CVPR’06).
Pugeault, N., W
¨
org
¨
otter, F., and Kr
¨
uger, N. (2008). Accu-
mulated Visual Representation for Cognitive Vision.
In Proceedings of the British Machine Vision Confer-
ence (BMVC).
Rosenhahn, B., Kr
¨
uger, N., Rabsch, T., and Sommer, G.
(2001). Automatic tracking with a novel pose estima-
tion algorithm. Robot Vision 2001.
Wang, Y., Teoh, E., and Shen, D. (2004). Lane Detection
and Tracking Using B-Snake. 22(4):269–280.
ROAD INTERPRETATION FOR DRIVER ASSISTANCE BASED ON AN EARLY COGNITIVE VISION SYSTEM
505
