
ON ANALYZING SYMMETRY OF OBJECTS USING ELASTIC
DEFORMATIONS
Chafik Samir
†
, Anuj Srivastava
*
, Mohamed Daoudi
**
and Sebastian Kurtek
*
†
Mathematical engineering department, UCL, Louvain-la-neuve, 1348, Belgium
*
Department of Statistics, FSU, Tallahassee, FL 32306, U.S.A.
**
Institut TELECOM ; TELECOM Lille1 LIFL UMR 8022, 59650 Villeneuve d’Ascq, France
Keywords:
Symmetry of 2D and 3D objects, Shape analysis, Elastic deformations, Optimal deformation, Facial shapes,
Geodesic path, Nearest symmetric shape, Measure of asymmetry.
Abstract:
We introduce a framework for analyzing symmetry of 2D and 3D objects using elastic deformations of their
boundaries. The basic idea is to define spaces of elastic shapes and to compute shortest (geodesic) paths
between the objects and their reflections using a Riemannian structure. Elastic matching, based on optimal
(nonlinear) re-parameterizations of curves, provides a better registration of points across shapes, as compared
to the previously-used linear registrations. A crucial step of orientation alignment, akin to finding planes
of symmetry, is performed as a search for shortest geodesic paths. This framework is fully automatic and
provides: a measure of asymmetry, the nearest symmetric shape, the optimal deformation to make an object
symmetric, and the plane of symmetry for a given object.
1 INTRODUCTION
Symmetry is an important feature of an object and in
symmetry analysis one asks questions of the type: Is
a given object symmetric? What is the level (quan-
tification) of asymmetry in an object? What is the
nearest symmetric object for a given asymmetric ob-
ject and how far is it? How to minimally deform an
object to make it symmetric? What are the planes(s)
of symmetry of a given symmetric object? And so on.
Such an analysis plays an important role in several
applications, including object design, manufacturing,
packaging, segmentation (Simari et al., 2006), view
selection (Thrun and Wegbreit, 2005), model reduc-
tion (Mitra et al., 2006), medical diagnosis, and sur-
gical planning. Reflection symmetry occurs in many
biological objects, and is an important part of how
we as humans perceive them. Symmetry analysis can
also play an important role in medical diagnostics, for
example, when the level of asymmetry in an organ re-
lates to its health. The proceduresfor quantification of
asymmetry, estimation of symmetry hyperplane, and
symmetrization of objects are also gaining attention
in 3D graphics, object recognition, indexing and re-
trieval.
In this paper we will consider both 2D and 3D ob-
jects, and we will restrict to the shapes of their bound-
aries for symmetry analysis. For the 2D case, we
will study a variety of objects from public databases,
but for the 3D case we will focus on shapes of facial
surfaces. Symmetry of faces has large relevance in
multiple contexts. For example, in orthodontics, see
for example (Tomaka, 2005), that symmetry analysis
can help plan surgical interventions in the craniofa-
cial area and to monitor their long-term effects. The
detection of facial landmarks can benefit from a sym-
metry analysis. An important component of cosmetic
facial surgeries is to enhance facial symmetries, long
considered a factor in improving appearances. A sur-
geon can be guided by the optimal deformation of a
face that will make it symmetric.
By definition, a solid or a surface is reflection-
symmetric if its reflection, with respect to a certain
plane, is identical to it. Consequently, classifying an
object as symmetric or not, or measuring the level of
its asymmetry, can be reduced to the task of comput-
ing differences in shapes between two objects: the
original one and its mirror reflection. Several recent
efforts in shape analysis have focused on symmetry
detection of 2D and 3D shapes (Mitra et al., 2006),
(Martinet et al., 2006), (Kazhdan et al., 2004). The
general framework used is as follows: Let β be an ob-
194
Samir C., Srivastava A., Daoudi M. and Kurtek S. (2009).
ON ANALYZING SYMMETRY OF OBJECTS USING ELASTIC DEFORMATIONS.
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications, pages 194-200
DOI: 10.5220/0001797201940200
Copyright
c
SciTePress

ject (curve, surface, etc) in an appropriate R
n
and R be
a plane of reflection in R
n
. R will be denoted by the
vector v ∈ R
n
perpendicular to R. Assuming that β is
centered in that coordinate system, define a measure
of asymmetry as:
ρ(β) = argmin
v∈R
n
kβ−H(v)βk
2
, H(v) = (I −2
vv
T
v
T
v
), (1)
where k·k is the two norm integrated over the points
in the object. H(v) is the Householder reflection op-
erator which rotates any vector into its reflection in a
plane orthogonal to v. In case ρ(β) is zero, the ob-
ject is said to be symmetric and the corresponding v
provides the the plane of symmetry. Zabrodsky et al.
(Zabrodsky et al., 1995) suggested a slightly differ-
ent formulation where they find the nearest symmetric
object to the given object. That is, define
SD(β) = argmin
v∈R
n
,s.t. H(v)α=α
kβ −αk
2
. (2)
This idea has been called the symmetry distance
(Zabrodsky et al., 1995). Mitra et al. (Mitra et al.,
2007) formulate the search for symmetrization defor-
mation in a similar way, but based on points sampled
from the original model. Sun et al. (Sun and Sherrah,
1997) proposed a method to detect symmetry based
on the Extended Gaussian Image (EGI).
Since symmetry analysis is intimately tied to
quantification of differences in shapes of objects and
their reflections, one should look more carefully at
how shape quantification is being performed. It is
a common trend in papers on symmetry to use Eu-
clidean norms between points sets to form cost func-
tions. Additionally, the authors have invariably used a
linear registration of points, between the original ob-
ject and its reflection, to evaluate these norms. In con-
trast, the literature in shape analysis of curves sug-
gests a larger variety of metrics and nonlinear reg-
istrations in measuring shapes (Michor and Mum-
ford, 2006). In particular, the use of elastic defor-
mations to compare and analyze shapes is gaining
popularity. Here, the curves are allowed to optimally
stretch/shrink and bend to match one another during
comparisons. Mathematically, this is accomplished
by applying all possible re-parameterizations, includ-
ing nonlinear registrations, on curves to find the opti-
mal registration. In this paper, we utilize the frame-
work of Joshi et al. (Joshi et al., 2007a), on elastic
shape analysis of curves, for performing symmetry
analysis of 2D shapes. To extend this idea to sym-
metry analysis of surfaces, we use the approach of
Samir et al. (Samir et al., 2006) where a facial sur-
face is represented as a collection of level curves, and
faces can be elastically compared by comparing the
corresponding curves.
The rest of this paper is organized as follows. We
present the general framework in Section 2, particu-
larize it for 2D shapes in Section 3 and for surfaces in
Section 4.
2 GENERAL FRAMEWORK
We advocate the use of geometric approaches in sym-
metry analysis. In particular, we suggest the use of
elastic shape analysis of curves and surfaces to help
quantify differences between objects and their reflec-
tions. A geometric approach for shape analysis in-
volves: (i) defining a space of shapes using their
mathematical representations, (ii) imposing a Rie-
mannian structure on it, and (iii) numerically com-
puting geodesic paths between arbitrary shapes. Care
is taken to remove symmetry-preserving transforma-
tions from the representation using algebraic equiva-
lences.
More precisely, one starts with a space, say C , of
mathematical representations of objects, e.g. closed
curves, and studies its differential geometry to iden-
tify tangent spaces TC . Then, choosing a Riemannian
metric – a positive-definite, bilinear, symmetric form
on tangent spaces – one can define lengths of paths
on C . Given any two objects, i.e. two elements of C ,
one can use a numerical approach to find a shortest
geodesic path between them. Let d
c
denote the length
of this geodesic.
Symmetry of a curve or a surface is invariant to its
translation, scaling, rotation, and re-parametrization.
Scaling and translation are usually accounted for in
defining C , but the other two are handled explicitly as
follows. One defines the action of the rotation group
SO(n) and the re-parametrization group Γ on C , and
defines the orbits of objects under these actions as
equivalence classes. In other words, for a q ∈ C, if
[q] is the set of all variations of q obtained by rotat-
ing and re-parameterizing it, then [q] is defined to be
an equivalence class. The set of all such equivalence
classes is the quotient space S = C /(SO(n)×Γ). The
distance between any two elements of S , say [q
1
] and
[q
2
], is the length of the shortest geodesic in C be-
tween elements of those two sets:
d
s
([q
1
],[q
2
]) = inf
p
1
∈[q
1
],p
2
∈[q
2
]
d
c
(p
1
, p
2
)
= inf
p
2
∈[q
2
]
d
c
(p
1
, p
2
) . (3)
The last equality assumes that SO(n) and Γ act on C
as isometries. The distance d
s
is invariant to rotation,
ON ANALYZING SYMMETRY OF OBJECTS USING ELASTIC DEFORMATIONS
195

translation, scaling, and re-parametrization of the ob-
jects. How can this distance be used to measure the
symmetry of an object? The answer comes from the
following result.
Theorem 1. 1) 2D Case. Assuming a simple, closed
curve β is bounded, and
˜
β is an arbitrary reflection of
β, then the distance d
s
between β and
˜
β is zero if and
only if β is symmetric.
2) 3D Case. For a two-dimensional surface S in R
3
,
if the distance d
s
between S and any of its reflection
˜
S is zero, then there exists a rigid motion taking S to
˜
S. In fact, this rigid motion is a composition of a re-
flection in some plane, and a rotation around an axis
perpendicular to that plane.
We note that this theorem actually holds for any
bounded point set in R
2
or R
3
, although in this paper
we are concerned only with curves and surfaces.
This motivates the use of elastic distance d
s
as a
measure of asymmetry in an object. If an object is
perfectly symmetric, the distance d
s
, between itself
and its arbitrary reflection, will be zero. If it is not
symmetric then we can use d
s
as a measure of asym-
metry in that object. In the next two sections, we par-
ticularize this idea to analyze symmetries of 2D and
3D shapes.
3 SYMMETRY ANALYSIS OF 2D
CURVES
We start this section by summarizing the geometric
shape analysis of planar closed curves. Consider a
closed curve as a mapping β from S
1
to R
2
. To ana-
lyze its shape, we will represent this curve by a func-
tion q : S
1
→ R
2
, where q(t) =
˙
β(t)
√
||
˙
β(t)||
. Here, s ∈ S
1
,
where k·k is the usual two norm in R
2
. Given a q
function, we can reconstruct the original curve up to a
translation. We narrow our study to closed curves of
length one by defining:
C = {q|
Z
kq(t)kdt = 1,
Z
q(t) ||q(t)||dt = 0} . (4)
The first constraint forces the curves to be of length
one and the second constraint ensures their closure.
Shapes of curves are compared using geodesic paths
on C which, in turn, requires a Riemannian struc-
ture. To impose a Riemannian metric on C , de-
fine the inner product: for any u,v ∈ T
q
(C ), hu,vi =
R
2π
0
hu(t),v(t)i dt. For computing geodesic paths on
C , there are a variety of numerical approaches avail-
able. In this paper we use a path-straightening ap-
proach, where the given pair of shapes is connected
by an initial arbitrary path in C and that path is itera-
tively “straightened” until it becomes a geodesic. For
details of implementation, please refer to the paper by
Joshi et al. (Joshi et al., 2007a). Let d
c
(q
1
,q
2
) be the
length of geodesic connecting q
1
and q
2
in C .
Since the symmetry of β is considered invariant
to its rotation or re-parametrization, our measure of
asymmetry should also be invariant to these trans-
formations. (Note that translation and scaling of a
curve have already been removed when curves are
represented as elements of C .) The rotation of a
curve is represented by a 2 ×2 matrix, an element
of SO(2), while a re-parametrization is a diffeomor-
phism γ : S
1
→ S
1
, an element of Γ, the space of all
such diffeomorphisms. Define the actions of SO(2)
and Γ on C as follows:
SO(2) × C →C , (O,q) = {Oq(t)|t ∈ [0, 1]}
Γ × C →C , (γ,q) = {
p
˙
γq(γ(t))|t ∈ [0,1]}
It can be shown that these two group actions com-
mute and, hence, we can define the quotient space
with respect to their direct product according to S =
C /(SO(2) ×Γ). The orbit of a shape, represented by
q, is given by:
[q] = {
p
˙
γOq(γ(t))|O ∈ SO(2),γ ∈ Γ} ,
and this denotes the equivalence class of all rotations
and re-parameterizations of q. The set of all such
equivalence classes is S .
To compute distances between any two elements
of S , one has to find the shortest path between the
two corresponding orbits. This length of this shortest
path is:
d
s
= inf
O∈SO(2),γ∈Γ
d
c
(q
1
,
p
˙
γOq
2
(γ)) . (5)
This minimization requires search over all rotations
and re-parameterizations of q
2
so that it best matches
q
1
. Note that if q
2
is a reflection of q
1
, then the op-
timization over SO(2) is similar to the one in Eqn.
1, except that the Euclidean norm is replaced by the
geodesic distance d
c
. The other difference from that
equation is the optimization over γ, which allows for
nonlinear registration between the two shapes. How
to solve this optimization problem? Joshi et al. (Joshi
et al., 2007b) describe a technique that uses gradients
to search over Γ but uses an exhaustive search over
SO(2) to minimize the cost function. We refer the
reader to that paper for details.
To analyze the level of asymmetry of a closed
curve β, we obtain a reflection
˜
β = H(v)β, where
H(v) = (I −2
vv
T
v
T
v
), for any v ∈ R
2
. Denote the rep-
resentation of β in C by q and that of
˜
β by ˜q. Let
ψ : [0,1] 7→ S be the geodesic path between q and ˜q
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
196

bone bird bottle brick camel cat car carriage
chopper crown fountain stef rat fork tool flatfish glass
Figure 1: Seventeen 2D shapes used in experiments on symmetry.
0 1 2 3 4 5 6
0
1
2
3
4
5
6
0 1 2 3 4 5 6
0
1
2
3
4
5
6
0 1 2 3 4 5 6
0
1
2
3
4
5
6
0 1 2 3 4 5 6
0
1
2
3
4
5
6
Figure 2: In each row, the left panel shows β and
˜
β, the middle panel shows geodesic ψ
t
between them, and the last panel
shows the optimal γ for their matching.
constructed using optimization techniques presented
in (Joshi et al., 2007b); we have ψ(0) = q and ψ(1) =
˜q. ψ provides important information about the sym-
metry of β:
1. Measure of Asymmetry. Define the length of the
path ψ as a measure of asymmetry of β:
ρ(β) = d
s
(q,H(v)q)) , for any v ∈R
n
. (6)
2. Nearest Symmetric Shape. The halfway point
along the geodesic, i.e. ψ(0.5), is perfectly sym-
metric. Amongst all perfectly symmetric shapes,
it is the nearest to q in S .
3. Deformation for Symmetrization. The velocity
vector
˙
ψ(0) provide a deformation (vector) field
on β than transforms β into the nearest symmetric
shape.
Next we present some experimental results on
measuring asymmetry on some 2D shapes taken from
one of the Kimia databases. We have used seven-
teen curves from different shape classes; these curves
are shown in Figure 1. Based on their appearances,
one can see that some curves show strong symmetries
while others look far from symmetric.
Our approach is to take a curve β, select an ar-
bitrary reflector in R
2
, and form a new curve
˜
β by
applying that reflector on β. Shown in the left col-
umn of Figure 2 are four examples of such random re-
flections. The last shape is an artificially constructed
shape with perfect symmetry, just to test the algo-
rithm. Then, we compute geodesic paths in S between
the shapes of q and ˜q, the representatives of β and
˜
β in C . Four examples of these paths are shown in
the middle column of Figure 2. The lengths of these
paths, ρ(β), provide the level of asymmetry of these
shapes. For the seventeen shapes shown in Figure 1,
the values of ρ(β) are shown in Figure 3. The bottle
and the fork are the most symmetric objects while the
fountain, the flatfish, the glass, and the tool are quite
close. On the other extreme, the cat and the chop-
per are the most asymmetric shapes. One can say that
the cat is almost ten times as asymmetric as the bot-
tle. To put these numbers in perspective, this measure
for the artificially constructed shape in the top right
ON ANALYZING SYMMETRY OF OBJECTS USING ELASTIC DEFORMATIONS
197
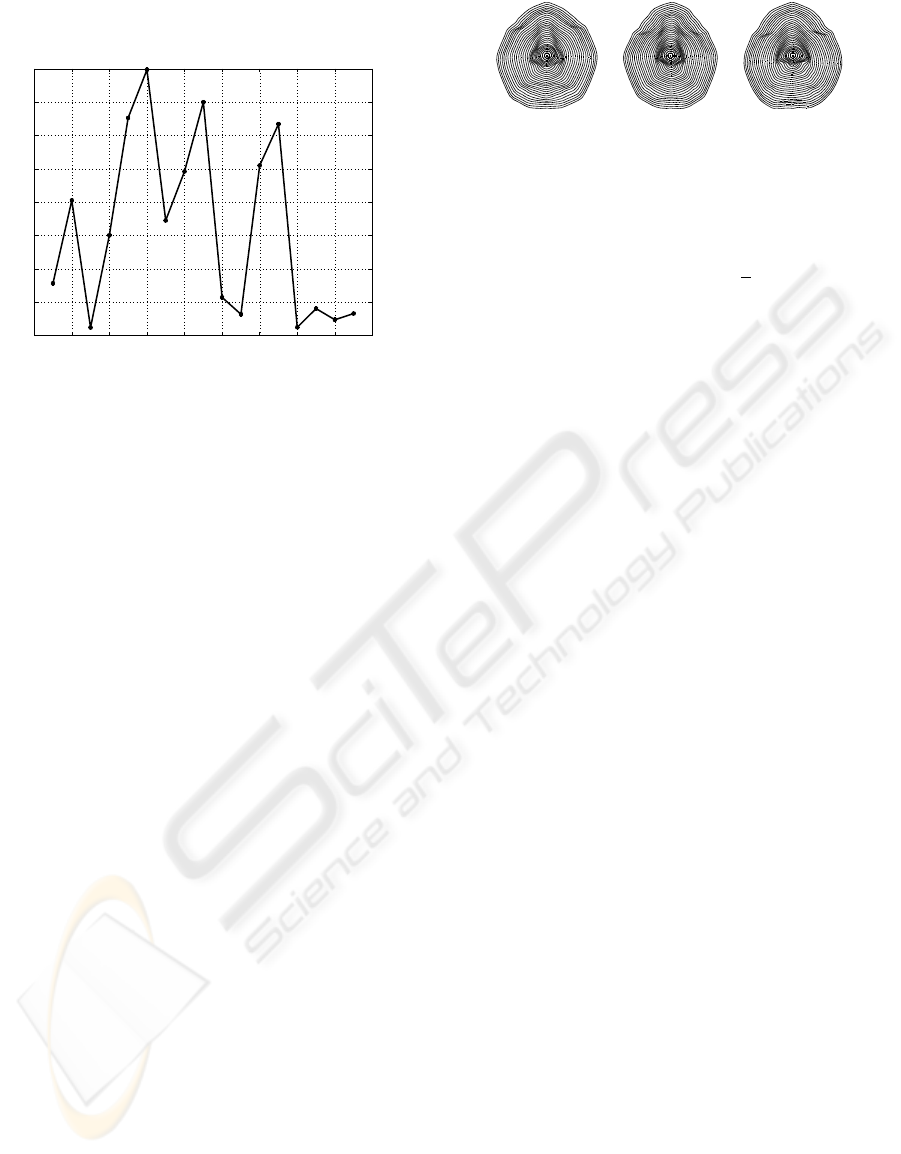
of Figure 2 is found to be 0.0814. This value can be
0 2 4 6 8 10 12 14 16 18
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Bone
bird
bottle
brick
camel
cat
car
carriage
chopper
crown
fountain
stef
rat
fork
tool
flatfish
Glas
Figure 3: The values of ρ(β) for the 17 shapes shown in
Figure 1.
treated as a numerical error in measuring symmetry of
perfectly symmetric objects. The last column shows
the optimal γs that resulted from optimal alignment
of curves with their reflections (Eqn. 5). For a per-
fectly symmetric shape γ is identity, while for largely
asymmetric shapes optimal γs are quite nonlinear.
4 SYMMETRY ANALYSIS OF
SURFACES
To analyze the symmetry of a surface is much more
complicated due to the corresponding difficulty in an-
alyzing shapes of surfaces. The space of parameteri-
zations of a surface is much larger than that of a curve,
and this hinders an analysis of symmetry in a way
that is invariant to parametrization. (Recall from pre-
vious sections that invariance to parametrization re-
quires solving an optimal re-parametrization of one
object, in order to best match the other.) One solu-
tion is to restrict to a family of parameterizations and
perform shape analysis over that space. Although this
can not be done for all surfaces, it is natural for cer-
tain surfaces such as the facial surfaces as described
next.
Using the approach of Samir et al., we can repre-
sent a facial surface S as an indexed collection of fa-
cial curves, as shown in Figure 4. Each facial curve,
denoted by c
λ
, is obtained as a level set of the (sur-
face) distance function from the tip of the nose; it
is a closed curve in R
3
. The treatment of symme-
tries of closed curves in R
3
is similar to that of planar
curves described in the previous section. As earlier,
let d
s
denote the geodesic distance between closed
curves in R
3
, when computed on the shape space
S = C /(SO(3) ×Γ), where C is same as Eqn. 4 ex-
cept this time it is for curves in R
3
. A surface S is
Figure 4: Representation of facial surfaces as indexed col-
lection of closed curves in R
3
.
represented as a collection ∪
λ
c
λ
and the elastic dis-
tance between any two facial surfaces is given by:
d
s
(S
1
,S
2
) =
∑
λ
d
s
(λ), where
d
s
(λ) = inf
O∈SO(3),γ∈Γ
d
c
(q
1
λ
,
p
˙
γOq
2
λ
(γ)) . (7)
Here q
1
λ
and q
2
λ
are q representations of the curves c
1
λ
and c
2
λ
, respectively. According to this equation, for
each pair of curves in S
1
and S
2
, c
1
λ
and c
2
λ
, we ob-
tain an optimal rotation and re-parametrization of the
second curve. To put together geodesic paths between
full facial surfaces, we need a single rotational align-
ment between them, not individually for each curve as
we have now. Thus we compute an average rotation:
ˆ
O = average{O
λ
} ,
using a standard approach, and apply
ˆ
O to S
2
to align
it with S
1
. This global rotation, along with optimal
re-parameterizations for each λ, provides an optimal
alignment between individual facial curves and re-
sults in shortest geodesic paths between them. Com-
bining these geodesic paths, for all λs, one obtains
geodesic paths between the original facial surfaces.
We apply this idea for symmetry analysis of facial
surfaces. We take a surface S and form its reflection
in an arbitrary plane. Then, we extract facial curves
out of each surface and use these curves, as described
above, to form a geodesic path between the facial sur-
faces. Shown in Figure 5 is an example of a geodesic
path between a face, distorted by a smile, and its re-
flection. For illustration, we show the geodesic using
both the rendered surfaces (top) and the facial curves
(bottom). In this case, the measure of asymmetry is
d
s
(S,
˜
S) = 0.0210.
In Figure 6, we present some additional examples
of symmetrizing facial surfaces. From top to bottom,
the measure of asymmetry in these faces is 0.0217,
0.0147, 0.0156, and 0.0195.
5 SUMMARY
We have presented a framework for analyzing sym-
metries in 2D and 3D objects. This framework is
based on elastic deformations of objects in a fashion
that is invariant to rigid transformations and global
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
198

Figure 5: The geodesic path between a face and its reflection.
Figure 6: Examples of symmetry analysis of faces: geodesic between faces and their optimally aligned reflections.
scaling. The use of nonlinear registration techniques
help improve the quantification of differences be-
tween shapes of objects and their reflections. This
framework provides a measure of asymmetry, the
nearest symmetric object, and a deformation field for
symmetrizing an object.
ACKNOWLEDGEMENTS
This paper presents research results of the Belgian
Network DYSCO (Dynamical Systems, Control, and
Optimization), funded by the Interuniversity Attrac-
tion Poles Programme, initiated by the Belgian State,
Science Policy Office. The scientific responsibility
rests with its author(s). This research was also sup-
ported in part by the ANR project under FAR3D
ANR-07-SESU-004, and CPER Nord-Pas de Calais
ambient intelligence.
REFERENCES
Joshi, S., Klassen, E., Srivastava, A., and Jermyn, I.
(2007a). A novel representation for riemannian anal-
ysis of elastic curves in R
n
. In CVPR.
Joshi, S., Klassen, E., Srivastava, A., and Jermyn, I.
(2007b). Removing shape-preserving transforma-
tions in square-root elastic (SRE) framework for shape
ON ANALYZING SYMMETRY OF OBJECTS USING ELASTIC DEFORMATIONS
199

analysis of curves. In Proc. of 6
th
EMMCVPR, Hubei,
China, pages 387–398.
Kazhdan, M., Funkhouser, T., and Rusinkiewicz, S. (2004).
Symmetry descriptors and 3D shape matching. In
Symposium on Geometry Processing.
Martinet, A., Soler, C., Holzschuch, N., and Sillion, F.
(2006). Accurate detection of symmetries in 3D
shapes. ACM Transactions on Graphics, 25(2):439
– 464.
Michor, P. W. and Mumford, D. (2006). Riemannian ge-
ometries on spaces of plane curves. Journal of the
European Mathematical Society, 8:1–48.
Mitra, N. J., Guibas, L., and Pauly, M. (2007). Symmetriza-
tion. In ACM Transactions on Graphics, volume 26,
pages 1–8.
Mitra, N. J., Guibas, L. J., and Pauly, M. (2006). Partial and
approximate symmetry detection for 3D geometry. In
ACM SIGGRAPH, pages 560–568.
Samir, C., Srivastava, A., and Daoudi, M. (2006). Three-
dimensional face recognition using shapes of facial
curves. IEEE Trans. Pattern Anal. Mach. Intell.,
28(11):1858–1863.
Simari, P., Kalogerakis, E., and Singh, K. (2006). Fold-
ing meshes: Hierarchical mesh segmentation based on
planar symmetry. In Eurographics Symposium on Ge-
ometry Processing 2006, pages 1824–1831.
Sun, C. and Sherrah, J. (1997). 3d symmetry detection
using the extended gaussian image. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
19(2):164–168.
Thrun, S. and Wegbreit, B. (2005). Shape from symmetry.
In ICCV ’05: Proceedings of the Tenth IEEE Interna-
tional Conference on Computer Vision, pages 1824–
1831, Washington, DC, USA. IEEE Computer Soci-
ety.
Tomaka, A. (2005). The application of 3d surfaces scanning
in the facial features analysis. Journal of Medical In-
formatics & Technologies, 9:233–240.
Zabrodsky, H., Peleg, S., and Avnir, D. (1995). Symmetry
as a continuous feature. IEEE Transactions on Pat-
tern Analysis and Machine Intelligence, 17(12):1154–
1166.
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
200
